基于三維激光掃描的既有鐵路中線勘測方法研究
2021-03-10 05:47:38付建紅胡慶武
鐵道勘察 2021年1期
朱 璟 付建紅 胡慶武 崔 昊 董 偉 吳 玄
(1.武漢大學遙感信息工程學院,武漢 430079; 2.鄭州大學水利科學與工程學院, 鄭州 450001; 3.中鐵第四勘察設計院集團有限公司, 武漢 430063)
隨著既有鐵路行車密度變高,其檢修、維護工作時間也隨之縮短,這對鐵路服役狀態檢測手段提出新要求。另一方面,隨著中國高速鐵路線路不斷擴展,與既有鐵路的對接日趨緊密,既有鐵路網也需進行改造,以加強運輸能力。因此,線路勘測是既有鐵路改造、維護以及增建二線的重要環節。傳統的既有線勘測以鐵路中線為控制線,基于全站儀、水準儀等進行接觸式測量,存在測量時間長、效率低等缺點,影響鐵路正常運行。隨著GNSS測量精度的不斷提高,部分鐵路勘測項目開始使用GNSS-RTK方法,雖然提高了測量效率,但仍需進行接觸式作業,已難以滿足現代化鐵路既有線勘測的安全性與效率要求[1-4]。
激光探測及測距技術(Light Detection and Ranging, LiDAR)通過激光掃描儀獲取目標表面的高精度三維坐標[5],具有速度快、精度高、受天氣影響小等優點,已在地形測量、建筑物變形監測和智慧城市等方面得到廣泛應用。其中,機載LiDAR與航天航空遙感技術受分辨率和精度限制,主要用于鐵路前期勘測設計和后期運營階段大范圍背景地形數據獲取[6-9]。而地面三維激光掃描通過固定設站或移動式三維激光測量,可獲取高密度、高精度的三維坐標,為既有鐵路的勘測、維護以及增建二線提供技術支撐。
已有許多學者開展相關研究,OUDE ELBERINK S等研究如何根據鐵路軌道上點之間位置的相關性,并使用地面掃描數據自動檢測并重建鐵路軌道[10];李建強設計基于移動激光掃描鐵路測量方案,通過精度驗證探討了地面激光掃描技術既有鐵路勘測的優勢與缺陷[11];YANG B等使用鋼軌的反射強度來進行鋼軌的檢測與提取[12];MENG X等基于地面的三維激光掃描點云數據,搜索特征點并進行連接,構建鐵路軌道模型[13];SONI A等通過使用迭代最鄰近點(Iterative Closest Point, ICP)方法將固定設站的地面激光掃描結果與標準鋼軌模板進行匹配,發現距離設站越近,截面擬合效果越好[14];李小路等研究了多種地面三維激光掃描點云軌道提取技術[15]。然而,固定式或移動式地面三維激光掃描均易受視角限制,導致獲取的鐵路軌道三維激光點云都存在相互遮擋、軌道及邊緣點云不完整等問題,影響軌道中心線提取精度。
鐵路軌道由兩條平行標準鋼軌組成,兩條軌道之間距離固定,具有顯著的結構特征,這對于從海量軌道點云中提取鋼軌十分有利。當前,基于三維激光點云的提取技術考慮了軌道平行的特點,以及鋼軌上特征點與地面的相對關系,但沒有充分利用標準鋼軌模板點云中點之間的相對關系,當鋼軌點云不完整時,直接影響鋼軌線型提取的精度和穩定性。為了解決鐵路軌道三維激光點云不完整對鋼軌線型提取的精度和可靠性問題,提出基于鋼軌結構特征約束匹配的三維激光點云軌道中心線自動提取方法,通過存在信息缺失的軌道點云與標準鋼軌模板進行匹配,充分利用已知點信息,降低邊緣遮擋對鋼軌提取結果的影響,以提高鋼軌自動提取的精度和魯棒性。
1 方法簡介
鐵路及其各種設施具有明顯的結構特征,左右鋼軌與軌道中心線距離相等且固定,且具有相同的形狀和尺寸,如鋼軌高度、軌頭寬度、軌底寬度等。但受激光掃描角度限制及場景目標設施相互遮擋,鋼軌點云通常存在缺失和噪聲,如圖1。
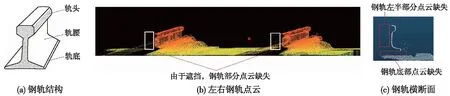
圖1 三維激光掃描鋼軌點云
鋼軌軌頭頂部最高處通常為軌頭中心(即鋼軌中心線),可以取鋼軌橫斷面上高程值最大點作為鋼軌中心線。對鋼軌進行三維激光掃描時,遮擋或噪聲會導致鋼軌點云不完整,直接以左右鋼軌軌頭點云頂部高程最大值計算的中心線會存在較大誤差。因此,通過實際鋼軌斷面點云與標準鋼軌進行嚴密幾何配準,以標準鋼軌的幾何特征直接計算不完整鋼軌點云中鋼軌的中線三維坐標,可減少計算誤差,其算法流程如圖2。
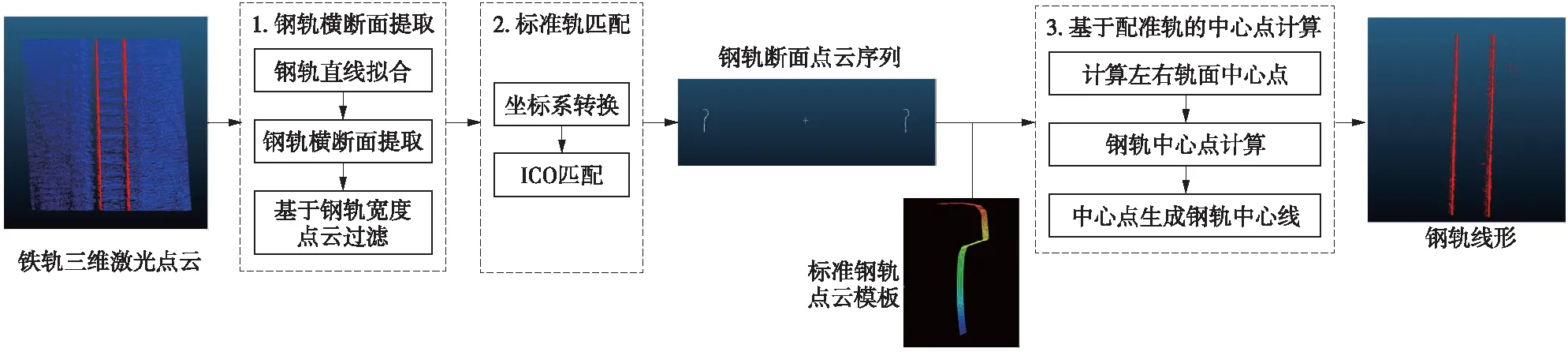
圖2 三維激光掃描技術路線
由圖2可知,首先,從左右鋼軌三維激光點云中按一定間隔提取鋼軌斷面序列;其次,根據標準鋼軌結構信息,構建標準鋼軌三維點云模板,再與鋼軌斷面序列匹配;再次,根據配準的標準鋼軌計算左、右鋼軌中心線上點的三維坐標;最后,根據軌道中心線與左右軌道中心線關系計算軌道中心線坐標。
2 鋼軌斷面點云提取
以左右鋼軌軌頭頂部高程最大值點作為鋼軌初始中心線,以初始中心線從左右軌中按照一定的間隔提取鋼軌橫斷面點云,具體步驟如下。
2.1 鋼軌初始中心線提取
(1)從左鋼軌起始部位開始,選取長度不超過0.1 m的鋼軌點云,按照1 cm×1 cm窗口進行遍歷,提取軌頭頂部高程最大值均值最大窗口,以窗口中心作為高程最大值點,即左鋼軌初始中心線第一個點。利用左右軌間距離限制,以左鋼軌初始中心線點計算右軌對應初始中線第一個點。
(2)從提取的左右鋼軌初始中心線上的第一個點開始,對鋼軌對象點云進行分段。因為提取的鋼軌初始中心線主要用于鋼軌橫斷面計算,分段間距不需要很密,一般取3~5 m。以第一個點為起點,左右軌同時按照5 m沿鋼軌延伸方向,取0.1 m的鋼軌點云,按照上述方法確定初始中心線上點。重復執行本步驟,直到鋼軌盡頭。以中心線里程由小變大的方向作為中心線方向,沿中心線方向進行分段操作。
(3)對左右軌鋼軌初始中心線點分段進行直線擬合和驗證,剔除不滿足相鄰三點在一條直線上的中心線點。
(4)取左右鋼軌中心點三維坐標均值作為對應分段中心點三維坐標,連接中心點構成鋼軌初始中心線。
2.2 鋼軌斷面點云提取
鋼軌斷面點云提取包括以下兩個步驟。
(1)以左右鋼軌初始中心線構建三維緩沖區,從軌道點云中剔除非左右鋼軌點云,得到僅包含左右鋼軌的點云數據,平面緩沖區以鋼軌中心線平行方向設置緩沖區,高程緩沖區以鋼軌中心線為頂部,向下設置緩沖區。以60 kg/m鋼軌為例, 平面緩沖區大小取標準鋼軌軌頭寬度為平面緩沖區,即73 mm;高程緩沖區要求包含鋼軌腰部,取至鋼軌底部,設為136 mm。
(2)根據設置的鋼軌斷面間距,以左右鋼軌初始中心線作為縱線,從左右鋼軌點云中取與縱線方向垂直的10 mm厚的點云,得到左右鋼軌斷面三維點云。圖3為按照新方法得到的一個斷面左右鋼軌點云。

圖3 左右鋼軌斷面點云
3 標準軌匹配
鋼軌斷面點云與標準軌匹配包括標準鋼軌點云模板生成、坐標變換和ICP特征匹配等,具體步驟如下。
3.1 標準鋼軌點云模板生成
鐵路鋼軌形狀都采用了抗彎性能極強的工字鋼斷面。以60 kg/m鋼軌為例,選取軌面寬度為45 mm,向下136 mm的部分構建標準鋼軌模板,生成厚度為10 mm的三維點云,如圖4。

圖4 60 kg/m標準鋼軌及斷面點云模板(單位:mm)
3.2 坐標系轉換
標準鋼軌點云模板三維坐標原點為(0,0,0)的局部坐標,實際鋼軌斷面點云坐標系為投影坐標系,在進行點云匹配之前,需將標準鋼軌點云平移至待匹配鋼軌點云中心附近,以減少坐標原點差異過大引起的匹配迭代收斂速度。
3.3 ICP形狀匹配
以鋼軌斷面點云為目標數據集,將標準鋼軌模板與之進行配準。采用迭代最近點匹配算法(ICP)進行點云配準,通過循環迭代選擇目標點云數據與參考點云數據對應關系點對,求得平均距離最小的剛體變換參數,對待配準點云數據進行變換,直到迭代計算達到一定次數或對應點平均距離小于給定閾值,有
(1)
式中,Q為目標點云數據集,即鋼軌斷面點云,P為待配準點云數據集,即標準鋼軌點云;n為點對個數,通常以待配準點云進行遍歷,尋找其在目標點云中最鄰近點作為點對;R為配準旋轉參數;T為配準平移參數。
根據迭代收斂后的配準參數R、T,可將標準鋼軌點云變換到與鋼軌斷面點云配準后坐標系中,得到配準后的標準鋼軌點云數據P,有
P′=QR-1-T-P
(2)
3.4 鋼軌中心線坐標提取

4 軌道中線計算

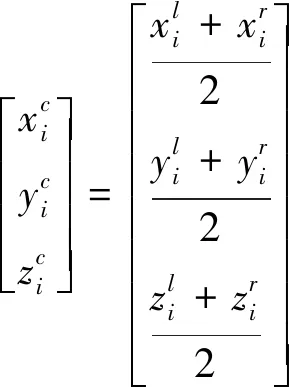
(3)
5 結果分析
5.1 實驗數據集
選取漢十高鐵棗陽段作為實驗區間,采用Rigel VZ400地面三維激光掃描按照不同的設站間隔、掃描角度間隔獲取不同密度的三維激光點云(見表1),各站激光點云都采用標靶拼接,拼接內符合精度均優于2 mm,共三組數據集,如圖5。
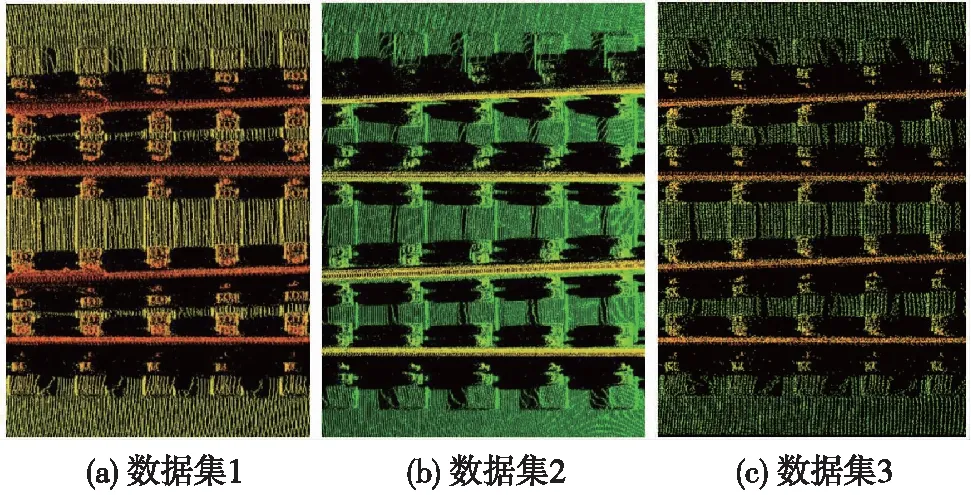
圖5 三維坐標實驗數據集

表1 實驗數據集規格
使用全站儀和水準儀按照傳統的線路勘測技術規范測量軌道中線坐標,中線按照5 m的間隔給出對應點的三維坐標,以驗證新方法的精度。
5.2 軌道中線提取結果及精度分析
圖6為采用新方法提取的左右軌中心線及軌道中線結果。

圖6 軌道中線提取結果
由圖6可知,新方法能夠取得穩健的軌道中心線結果,與傳統勘測手段測量的中心線高程進行對比,其誤差分布如圖7。
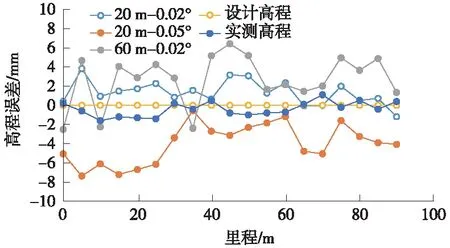
圖7 軌道中線高程誤差
由圖7可知,20 m設站間距高程精度高于60 m設站間距,且掃描角度間隔越小,點云密度越高,高程精度越高。
直線段落的標準軌道軌距為1 435 mm,60 kg/m鋼軌頂部寬度為73 mm,左右軌間距為1 508 mm,軌距誤差分布如圖8。分別統計軌距中誤差和軌頂高程中誤差,結果如表2。
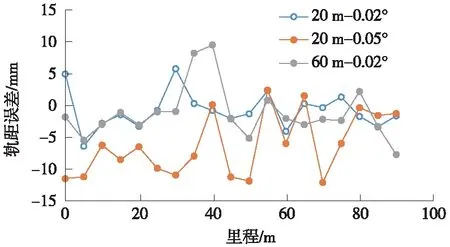
圖8 軌距誤差

表2 數據集提取結果精度 mm
由表2可知,在20 m設站間距、掃描角度0.02°情況下,軌距中誤差小于2 mm,中心線高程中誤差小于2 mm;在60 m設站間距、掃描角度0.02°情況下,軌距中誤差小于3 mm,中心線高程中誤差小于3 mm;在20 m設站、掃描角度0.05°情況下,軌距中誤差小于4 mm,中心線高程中誤差小于4 mm。由此可見,中心線提取結果受到設站間距影響,設站間距越小,點云密度越高,精度越高。
6 結論
傳統的鐵路既有中線測量為接觸式測量,耗時長,效率低,對鐵路正常運營干擾較大。三維激光掃描技術可以有效縮短測量時間,提高效率,降低對鐵路正常運營的影響,滿足鐵路測量的高效率、高精度要求。針對地面三維激光掃描入射角限制以及不同視角遮擋現象造成部分軌道點云缺失等問題,利用標準鋼軌結構信息嚴密匹配,解決實際鋼軌點云中特征缺失或不夠的問題,提高鋼軌中心線提取精度,為基于三維激光掃描技術的既有線勘測和維護提供了技術保障,具有廣泛的應用前景。
猜你喜歡
天天愛科學·科學啟蒙(2025年3期)2025-03-27 00:00:00
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
云南畫報(2021年12期)2021-03-08 00:50:54
當代陜西(2019年8期)2019-05-09 02:22:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
鐵道通信信號(2018年7期)2018-08-29 01:17:04
家庭影院技術(2018年4期)2018-05-09 07:07:52
通信電源技術(2016年4期)2016-04-04 02:58:04
專用汽車(2016年4期)2016-03-01 04:13:43
工程建設與設計(2016年3期)2016-02-27 10:50:46