液相外延設備溫度控制系統研究
2021-03-10 02:40:28程文進黃志海陳李松
電子工業專用設備 2021年1期
關鍵詞:設備
李 瑫,程文進,黃志海,楊 勇,陳李松
( 中國電子科技集團公司第四十八研究所,湖南 長沙410111)
水平滑舟式液相外延具有變化組分容易、組分及厚度控制能力強和可重復性好等優勢,是一種研制和生產碲鎘汞薄膜材料有效且成熟的方法[1]。水平液相外延設備是目前國內實現該種工藝方法的主流設備,其溫度控制的精度、升降溫的速率、溫度場的均勻性直接影響了外延材料的質量、外延片的均勻性、可重復性、尺寸、設備的產能等,是設備的關鍵性能指標。本文針對液相外延設備的溫度控制要求,研究設計滿足外延工藝技術要求的溫度控制系統,并進行測試驗證。
1 加熱系統總體設計
設備的加熱系統由PLC(可編程控制器)、閉環控制器、功率調節器(簡稱調功器)、爐體、溫度傳感器等構成。其中,PLC 用于設定目標溫度、控制模式及控制參數,讀取過程值、狀態等,閉環控制器則根據檢測溫度與目標溫度的偏差進行PID(比例積分微分)閉環計算,輸出加熱功率信號,調功器根據加熱功率輸入信號控制功率器件,輸出正確的電壓和電流至爐體進行加熱,形成溫度場,最后由溫度傳感器檢測目標位置溫度并反饋回閉環控制器。溫度采集包括反應管內溫度和管外溫度,并以管內溫度作為控制目標。為保證控溫精度及溫度場的空間均勻性,爐體采用5 段獨立加熱獨立控溫方式,并采用串級PID 進行雙閉環控制,如圖1 所示。

圖1 加熱系統控制原理
2 溫度閉環控制設計
串級控制因其抗干擾和自適應能力強而被廣泛用于對象擾動幅度大、非線性、容量滯后大、參數相互關聯[2]的場合。加熱系統中反應管內溫度真實地反映爐體中反應管內溫度場,但只能通過管外溫度的熱輻射來維持,管內溫度與管外溫度之間存在著非線性且大滯后的復雜關系,采用串級控制可以簡化控制模型,同時提高整個系統的響應速度。其溫度控制原理如圖2 所示。

圖2 溫度串級控制框圖
圖2 中,當串級命令為OFF 時,溫度處于單控模式,設定溫度作為管外溫度設定值(Tex);當串級命令為ON 時,溫度處于串級模式,設定溫度作為管內溫度設定值(Tin),管內溫度PID 控制輸出(TPID-in)經串級計算后作為Tex。管內溫度與管外溫度閉環采用相同的控制周期,以提升系統的響應速度[3]。
液相外延設備一般要求溫度按照設定曲線進行精確的升降變化,在不同的升溫/降溫階段要求的加熱不同,對應的控制參數也有所差異。但傳統PID 控制器以一組固定不變的PID 參數來解決被控過程參數變化、干擾等問題,顯然難以獲得滿意的控制效果[4]。因此,本文在串級計算中對TPID-in乘以系數A,再對Tin進行偏置,兩者之和作為Tex。串級計算式為:

式中,A為串級系數,表征TPID-in對管外溫度的調節幅度;B為串級常數,表征管外溫度輻射到管內溫度的梯度關系。為保證溫度曲線各階段均有良好跟隨性能,本文將溫度變化分為快升、慢升、慢降、快降4 個階段,分別采用不同的串級參數,由工藝程序根據溫度變化狀態自動選取。如此,可通過動態調整串級參數來間接調整溫度控制PID 參數,使溫度曲線具有良好的跟隨性能。
3 控制程序設計
設備的控制系統采用三菱FX5U 系列PLC 作為主控制器,溫度控制程序由PID 閉環控制、通信協議、控制邏輯3 部分構成,如圖3 所示。其中,控制邏輯部分進行加熱開/ 關、報警、保護等邏輯控制,管理通信的邏輯和時序,準備通信數據并對接收數據進行處理;通信協議部分定義通信協議號的功能、訪問的寄存器地址、數量、數據長度以及數據存儲區域,以便程序調用協議號發起通信;PID 閉環控制部分負責讀取溫度傳感器信號并進行線性化,接收通信數據和命令,進行PID 閉環計算,輸出加熱功率控制信號。控制程序首先初始化通信協議所需訪問的寄存器地址、數量、數據長度等數據,之后根據上位機或自動工藝命令,設置相應的通信請求;在通信空閑時,按順序選取優先級最高的通信請求,準備其相應的通信數據,發起通信,并待通信結束后進行處理:若異常結束,重新設置通信請求,若重試>3 次,報錯;若正常結束,根據協議功能進行相應的處理。

圖3 溫度控制程序結構
4 測試及結果分析
鑒于非線性溫度系統較難建立準確的數學模型,采用溫控儀自動整定再手動微調的方法確定閉環PID 參數及串級A、B參數。具體方法如下:
(1)單控模式下,加熱外溫至目標值并穩定后,進行外溫PID 自整定;整定結束并穩定后,觀察管外溫度的控溫精度是否滿足應用要求,若不滿足則手動微調參數;
(2)溫度穩定后,記錄反應管內、外溫度的差值ΔT;將串級A參數設為默認值0.3,B參數設為B=A×50+ΔT;
(3)使能串級控溫,待管內溫度在目標值附近穩定后,進行管內溫度PID 自整定;整定結束并穩定后,觀察管內溫度的控溫精度是否滿足應用要求,若不滿足則手動微調參數;
(4)按照要求的速率進行斜率升降溫,調整串級A參數,使實際管內溫度曲線與設定斜率偏差在3%以內;不同A參數對應的B參數仍然按照B=A×50+ΔT計算。
溫度控制系統的控制參數如表1 所示。
在水平液相外延設備上進行控溫試驗,在不帶石墨舟的情況下,管內溫度從室溫升至450 ℃并穩定的過程,整體溫度曲線如圖4 所示,其右側方框下方所標記是曲線的局部放大圖。從圖4 可以看出,升溫速率約31 ℃/min,超調6 ℃(管內溫度3),控溫精度為450 ℃±0.1 ℃,滿足設備的控溫要求。通過可移動單點熱偶測量反應管內軸線上的溫度分布如圖5 所示(以溫區3 中心為零點,往爐內為正,爐口為負,每間隔10 mm 測量一個點,每點停留5 min)。
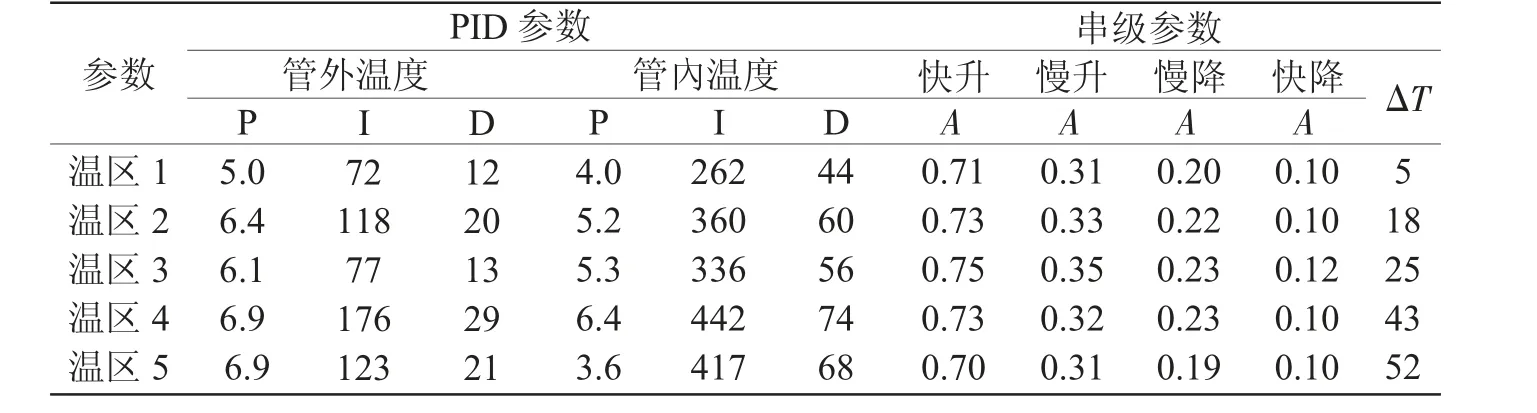
表1 溫度控制參數
由圖5 可知,在±250 mm 區間內(即500 mm恒溫區),軸線上溫度最大偏差為0.7 ℃,標準差0.21 ℃,恒溫區長度及溫度均勻性均滿足外延工藝要求。
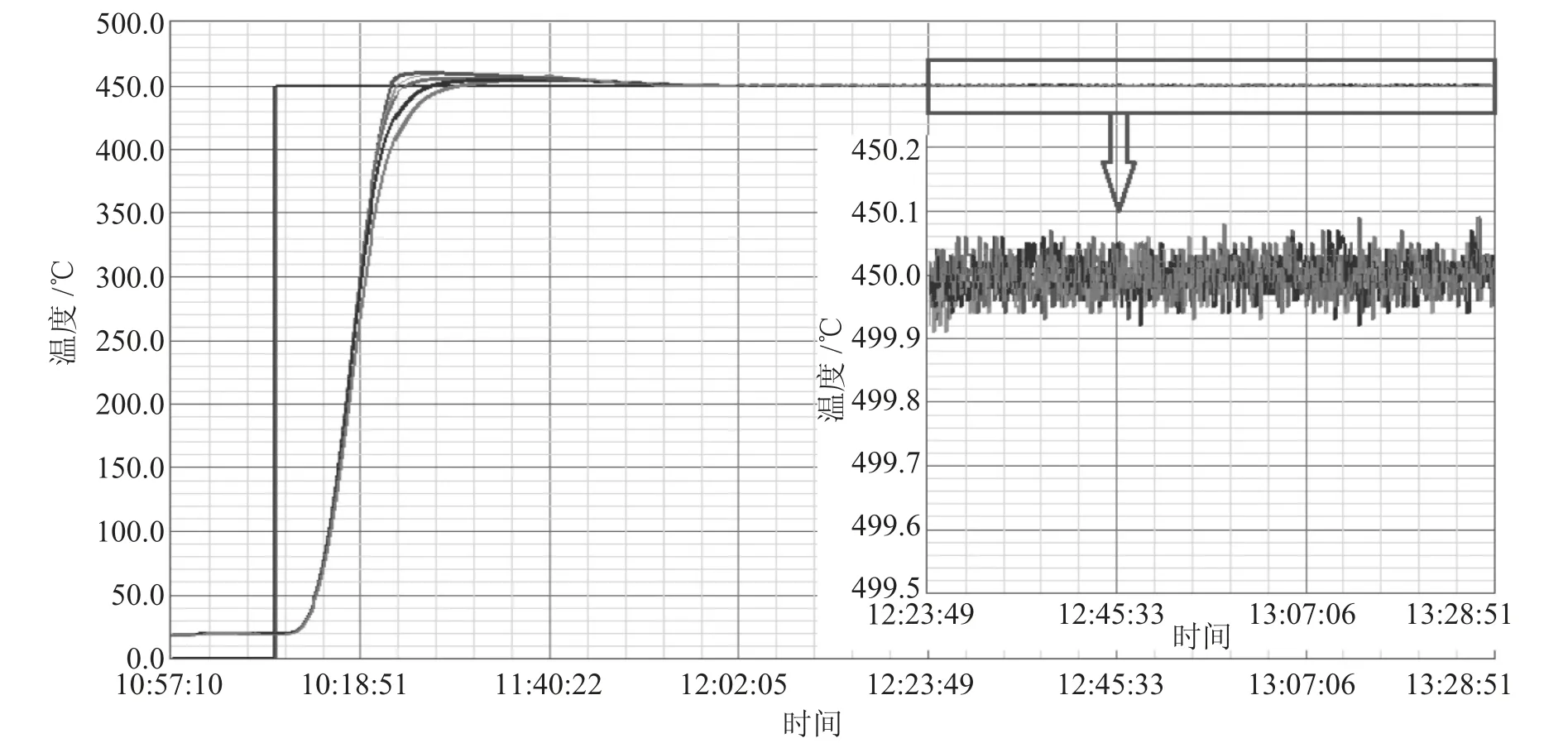
圖4 管內溫度升溫及穩定過程曲線

圖5 反應管內恒溫區溫度曲線
通過編輯自動工藝測試溫度控制的跟隨性能,溫度的設定曲線及實際曲線如圖6 所示。圖6中僅顯示溫區2~4 的溫度曲線(溫區1、5 不在恒溫區內),整體曲線右側方框下方所標記的是曲線的局部放大圖。
從圖6 可以看出,管內溫度實際曲線可以很好地跟隨設定值的變化,特別在對外延至關重要的緩慢降溫階段,降溫斜率可保持0.1 ℃/min,與設定值的最大滯后偏差≤0.3 ℃,符合工藝技術要求。
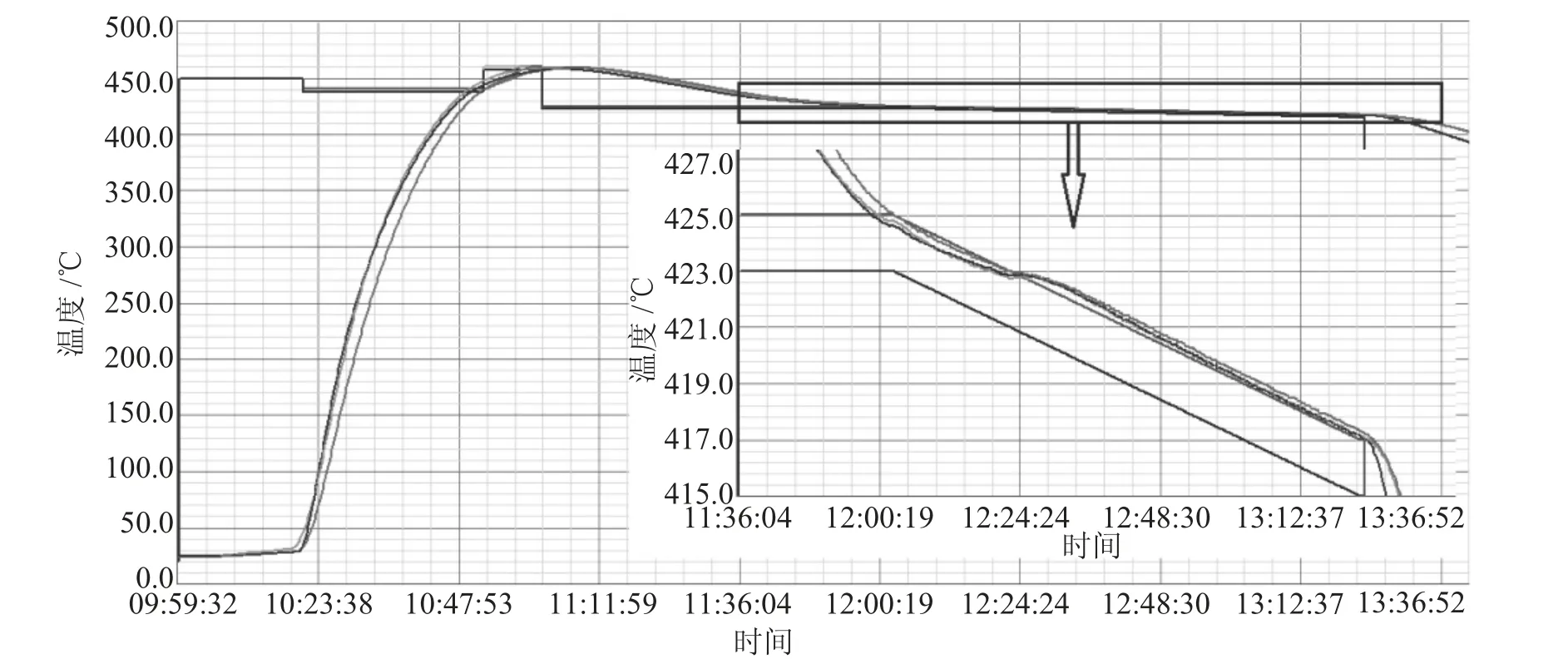
圖6 工藝過程中的溫度跟蹤曲線
5 結 論
通過測試結果可以看出,設計開發的多段獨立加熱系統可以滿足液相外延設備爐體空間上的溫度均勻性控制要求,恒溫區長度達到500 mm;通過采用串級PID 算法對管內溫度進行精確控制,恒溫區溫度均勻性小于等于0.21(標準差),控溫精度小于等于±0.1 ℃,并且升溫較快,超調較小,可以減少工藝升溫時間。通過對串級參數進行動態調節,滿足了不同時間對加熱功率的不同需求,溫度可以較好地跟隨設定曲線變化,特別在工藝生長階段,溫度降溫速率可以保持0.1 ℃/min,與設定值的最大滯后偏差小于等于0.3 ℃,完全滿足生產工藝要求。
6 結束語
針對液相外延設備,設計了多段獨立控制的加熱系統,滿足了空間上溫度均勻控制的要求;采用串級控溫方式,簡化了非線性大慣量的爐體中反應管內溫度的控制模型,并應用PID 算法對管內溫度進行精準控制;通過對不同加熱階段的串級參數進行動態調整,在時間上提升反應管內溫度的動態跟隨性能。設備的檢測結果表明,該溫控系統可以滿足不同加熱階段的不同功率要求,溫度控制的精度、恒溫區均勻性以及動態跟隨性能等均符合工藝技術要求。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
