冰區船舶模擬航行設計與自動評估方案
2021-03-10 13:33:50周建文趙炎平席永濤
中國航海 2021年1期
周建文, 趙炎平, 席永濤
(1.集美大學 航海學院, 福建 廈門 361021;2.中國極地研究中心 船舶與飛機管理處, 上海 200136;3.上海海事大學 商船學院, 上海 201306)
從2020年7月1日開始,船長、大副和值班駕駛員只有持冰區航行培訓證書或具有相應冰區實船航行經驗才能在南北極冰區航行。[1]根據《國際極地水域營運船舶規則》[2](簡稱《極地規則》)的要求,極區水域的油船和郵船在1成冰以下且沒有陸源冰的“開闊水域”航行時,船長、大副和值班駕駛員需參加基本培訓,而其他類型船員無需參加任何培訓;在2成冰以上的“其他水域”航行時,不管是油船、郵船,還是其他船舶上的船長和大副,均需參加高級培訓,值班駕駛員需參加基本培訓。
但上述規則、國際海事組織(International Maritime Organization, IMO)編制的示范課程7.11[3]和《海員培訓、發證和值班標準國際公約》、(International Convention on Standarks Training, Certification and Watchkeeping for Seafarers, STCW)(簡稱《STCW公約》)關于使用模擬器的指南也只規定這些培訓的框架性內容和模擬器的最基本要求,沒有對在模擬器上進行的詳細教學內容、練習任務設計和場景的具體要求做出規定,更沒有指出適任能力的關鍵性評估指標,給冰區航行模擬器的研發和實踐教學帶來很大的困擾,尤其是無冰區航行經驗的教學和開發人員,對這些框架性內容的理解更容易出現較大的偏差。鑒于此,本文以《STCW公約》《極地規則》和IMO示范課程中關于極區水域基本培訓的相關內容為研究對象,充分考慮冰區航行事故類型和在國外培訓過程中學員常遇到的問題,結合極區水域航行經驗和實船極地操作手冊[4],在已有的航行模擬器研發和實踐教學經驗的基礎上,凝練出完整的極區水域基本培訓模擬器實操強化內容,設計3個典型的模擬航行任務及相應的模擬航行場景和關鍵性評估指標,初步提出構建我國A級航行模擬器自動評估體系的方法,為冰區航行模擬器的研發和實踐教學提供一套系統且全面的需求方案。
1 極區水域模擬航行任務設計
1.1 基于規則要求的模擬器實操內容
《STCW公約》強制實施部分的附表A-V4-1規定了在極區航行基本培訓中要掌握的基本知識和技能;培訓指南B-V4部分列出了船長和駕駛員在極地航行船上任職前必備的基本知識,包括識冰、船舶性能和在冰區操縱船舶等10個方面的要求;《極地規則》A部分第12章規定了配員和2類培訓課程適用的對象及其任職要求等;示范課程7.11給出了基本培訓的課程目標、課時分配和課程框架,并在課程內容4-冰中操作和6-破冰船輔助2項中要求了7個課時的模擬器訓練,見表1。由表1可知:能在模擬器上進行的教學內容有冰區操縱和破冰船護航操作,共計7個學時的模擬操縱訓練。
1.2 基于實踐需求的實操內容
俄羅斯尼維爾斯特海事大學在極地船舶操縱模擬訓練方面具有豐富的經驗,其培訓統計數據表明:在極地航行操縱模擬訓練中,因讓冰操作不當或不及時約占20%;冰中迷路、錯失機會進入清水或大范圍冰區、損壞船體等冰中航行不熟悉的占26%;冰情分析不當或不及時導致找不到航路受困等占16%。[5]這些統計數據都為極區水域船舶操縱模擬要點和相應的評估指標提供了可借鑒的依據,見圖1。
SOUTHWELL[6]于2017年統計的冰區海上事故類型反映出損壞舵和車葉引起的事故在所有事故中的占比高達42%,其中:螺旋槳受損達30%;撞擊冰山、多年浮冰等達22%;舵葉受損達12%;因讓冰不當致使船殼受損達16%。冰區航行海上事故類型和比例見圖2,這些統計數據為極區水域模擬航行任務設計和評估指標提供了良好依據。
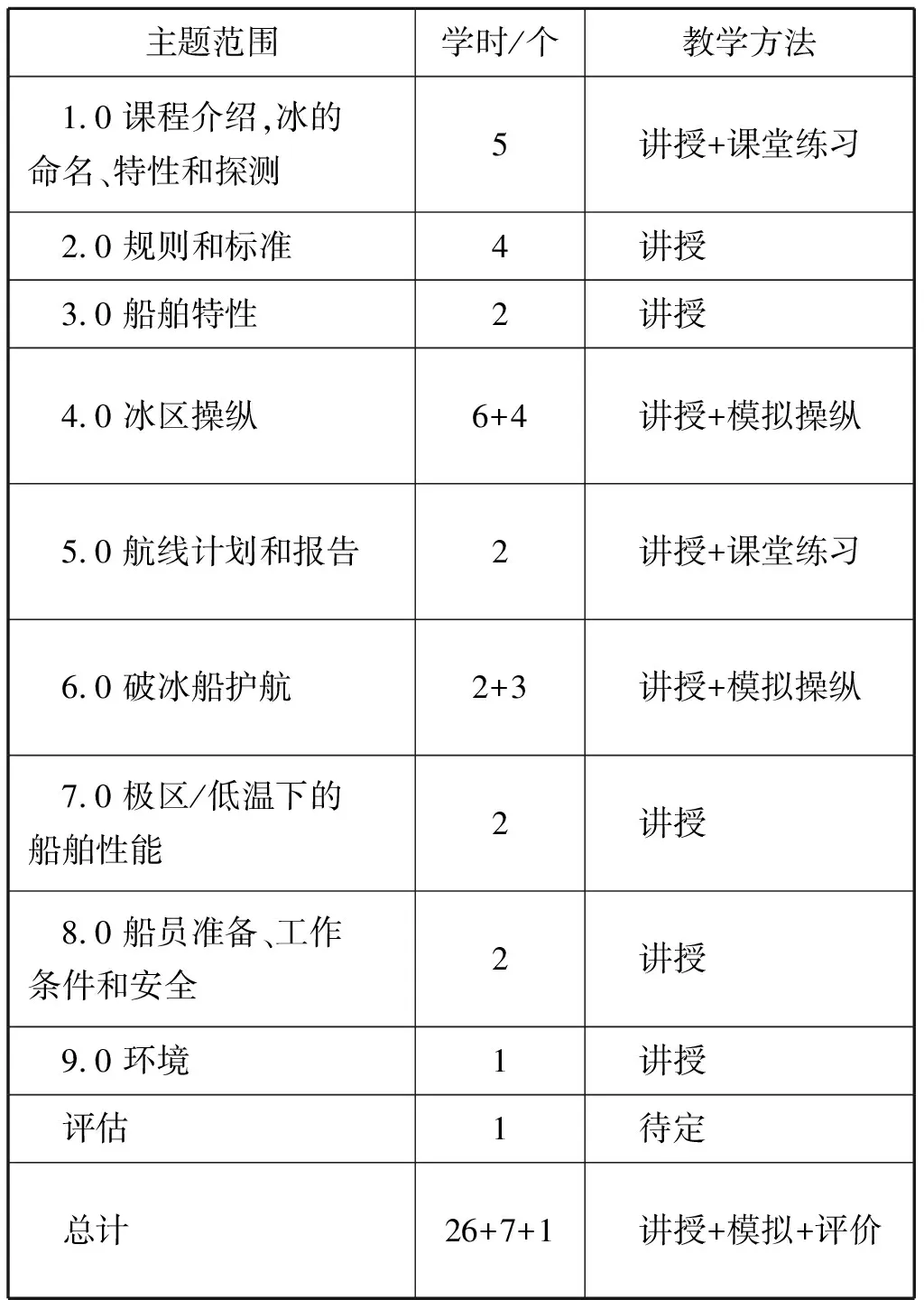
表1 基本培訓示范課程項目及課時安排
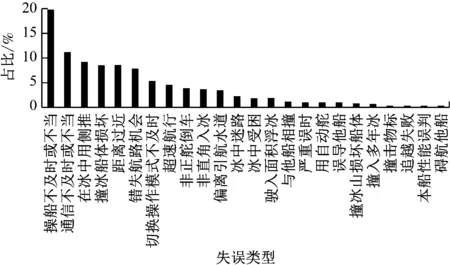
圖1 極地航行受訓學員失誤類型和比例
1.3 模擬航行實操內容與訓練任務
1.3.1實操內容
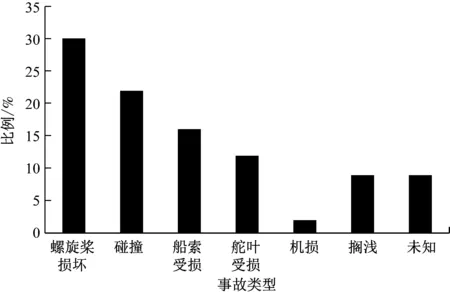
圖2 冰區航行海上事故類型和比例
《STCW公約》對值班駕駛員提出了安全操作船舶、法律法規要求、應對突發事件和環境保護等4個方面的適任要求。具體在執行適任能力培訓時,示范課程7.11建議從9個方面進行理論與實訓教學(如表1所示),其中第4項、第5項和第6項可在模擬器上進行實訓,但“航行計劃和報告部分”不涉及計劃的具體制訂,要求學員根據計劃執行即可,可將其整合到第4部分中進行整體安排。另外,極區船舶航行模擬器實操有必要有針對性地將第1.2節涉及的國外培訓機構總結的船員常見操作失誤和實際極地海上事故種類整合到極區船舶航行模擬器實操內容中,以提高船員在實操中的相應能力。因此,用于開展極區水域基本培訓的航行模擬器的實操內容可設計為以下3個方面:
(1)進出冰區的船舶操縱包括對出入冰時的速度和角度的控制。
(2)穿越冰區的操作內容包括:對速度和航向的及時控制;避免舵、槳和船體損壞的后退、順勢操縱;冰區綜合導航方法,該方法是極區水域船舶值班駕駛員基本培訓的主要內容,要求學員會利用駕駛室內的各種資源進行安全導航,使船舶沿著既定航路的大致方向航行,包括使用探冰燈、雷達回波探冰、獨立的冰圖或電子海圖上疊加的冰圖等冰情資料、冰雷達(如裝配)等模擬設備或輔助工具,結合視覺系統觀察識別冰山、冰脊、冰巖和冰間水道或湖等影響船舶安全的主要冰情;保持船舶連續航行,避免船舶受困。
(3)破冰船輔助操作包括:與破冰船間通信的設備和方法的使用;與破冰間的安全距離控制;護航過程中的速度控制。
1.3.2訓練任務設計
這些模擬實操內容需輔以相應的實操訓練任務,讓學員在完成訓練任務過程中掌握相關的知識和技能,結合中國“雪龍”船和“雪龍2號”船南北極水域航行經驗和水域的實際情況,訓練任務設計如下。
1.3.2.1 稀疏浮冰區航行
PC6級單漿極區客船計劃穿越前方4~6成分散的1 a浮冰區,冰區中分布有冰山、冰巖、碎冰和不同程度的亂冰。水域內有北風5級,強流2~3 kn,能見度良好。盡量利用清水和薄冰航行,以順利穿越冰區。
1.3.2.2 密集浮冰區航行
傍晚時分,PC6級極區客船按計劃航線穿越前方7~8成1 a浮冰區,這些浮冰中分布有巨型冰山、小冰山、冰巖和厚度不一的冰脊,浮冰中有可用的冰間水道和薄冰。所在水域有北風5級,強流2~3 kn,前方有大雪,可能導致能見度低下。調用計劃好的航線,按航線大致方向航行,利用冰間水道,避開冰山、冰脊、冰巖和厚浮冰等危險冰況,盡量保持連續航行不被冰困住,成功穿越冰區。
1.3.2.3 破冰船護航操作
PC7級單漿極區客船隨著破冰船穿越一片固定冰區,該冰區內有各種冰脊和冰山,破冰船有可能停下來撞擊破冰,按破冰船的指令調整和控制本船與破冰船之間的距離和航速,成功穿越冰區。
2 模擬場景設計
在極區水域船舶航行模擬器實操內容中,除了調用相應冰級的船模供學員操縱以外,需還提供航行水域、相應冰況和極地特有的通航環境,通航環境包括極地典型的風流變化、高緯度的晝夜變化、影響能見度的雨雪霧、陰暗天氣、兩極典型水上動物和極地航用資料等。
2.1 水域設置
《極地規則》規定60°S以南及60°N緯度線和北大西洋多個點的恒向或大圓連線以北的水域為極區。訓練水域應設計在這些水域內,并考慮以下幾個方面的因素。
1)極區水域的高緯度水文氣象特點、晝夜變化和測繪數據不詳盡的海圖等。
2)注意訓練水域冰情設置應盡量符合以下實際情況:北極水域以浮冰為主,冰山規模較小且集中在加拿大東部和格陵蘭東西海岸;在南極的一個水域內可布置各種類型的浮冰、冰山、冰脊和冰巖等冰況。兩極水域的氣候特征、海冰類型和特點存在明顯的不同。
3)需根據現成的數據編制冰情資料,供學員訓練時使用。如何使用冰情資料是重點訓練的內容之一。但是,受學時數限制,訓練水域范圍較小,需完整地布置從稀疏、密集到復雜的極區訓練場景和任務,靠原始的大范圍船用冰情資料難以做到有效匹配。為匹配小范圍覆蓋全類型冰況,需考慮利用冰區航用電子海圖顯示與信息系統(ICE Electronic Chart Display Information System, ICE-ECDIS)的輔助功能,在電子海圖顯示與信息系統(Electronic Chart Display and Information System, ECDIS)模擬器上顯示定制的模擬冰圖和氣象資料。
此外,在設計訓練水域大小時,需結合相應冰況中實際的航速。推薦按以下范圍設計冰區水域,即:稀疏冰區8 kn航行1 h,共8 n mile;密集冰區5 kn航行3 h,共15 n mile;固定冰或9~10成冰區3 kn航行2 h,共6 n mile;3個任務共需約30 n mile的訓練水域即可。另外,《STCW公約》并沒有包含破冰船引航業務的相關培訓內容,只從非破冰船的角度考慮培訓內容,不利于中國破冰船破冰引航業務的熟悉,建議在高級培訓中增設破冰船破冰引航相關內容的培訓。
2.2 冰情定制
極區水域船舶航行模擬器實操內容主要是冰區航行,因此設置相應的冰情是模擬場景設計的關鍵環節。但是,現成的冰情資料范圍大,局部水域難以完整,包括碎冰、冰山、冰巖、冰脊、冰間湖、冰間水道、冰裂縫、冰丘、浮冰帶、密集浮冰區及一定范圍內的固定冰等冰況。[7-8]冰區航行模擬器應考慮上述各種冰的可視化和冰情的參數化設置界面(可視模擬器而定),并根據在實際極地冰區航行過程中遇到的典型操作要點設計訓練水域內的冰情,如船舶舷側壓力預判訓練的位置點布置、避讓冰時的轉向幅度、浮冰中冰山的提前考慮、冰間水道的分布、冰區中薄弱環節的合理布置和第1.2節所述各種錯誤等,推薦定制如下。
2.2.1稀疏冰區
應布置各種大小且形狀各異的冰山、危險冰巖、冰山下風方向的碎冰、受風影響顯著的浮冰帶和天空中有明顯冰光的小范圍浮冰,見圖3。
2.2.2密集浮冰區
應布置厚度、范圍和平整度都不同的浮冰,以及訓練學員在大范圍浮冰內尋找行進方向的冰光、局部清水上空的暗色天空和可能誤導學員的巨型冰山上風方向的清水區等,設置后的整體印象(見圖4)。
結合通航環境,布置夜晚、下雪或霧等可能導致能見不良的復雜環境,培養學員在密集浮冰區中對冰的深刻認識、減少冰對舷側壓力的操船方法和利用當前水域的視覺冰況對比冰圖資料,培養學員在密集浮冰區中通過視覺觀察進行導航的能力。

圖3 稀疏冰情定制

圖4 密集冰區定制
2.2.3破冰船輔助航行冰情
選擇符合實際的水域,布置一段固定冰或9~10成冰的冰情。這種冰情可參考“雪龍2號”在中山站前沿水域為“雪龍號”破冰準備貨物運輸路線時的固定冰。[9]提供這樣的冰況環境主要考慮的是破冰船中途受阻時尾隨船速度和尾隨船與破冰船間距離的控制、與護航船的配合操縱和破冰船引航等業務的訓練。
2.3 通航環境設置
以南北極夏季航行為主,考慮極地高緯度冰區水域明顯的通航環境,如頻繁地下雪或下霧、多數時段低層云籠罩極區水域等。整體上呈現陰惡、能見度較差、水溫和氣溫低下及特殊日照現象的天氣[7, 10-14],具體設置如下。
2.3.1空中天氣要素
主要考慮設置氣溫、霧或雪、日照時間、按規律變化的風(布置典型的極區氣旋即可)和低層云等5種基本要素,并在模擬駕駛室內的相應儀器設備中呈現。
2.3.2海面環境要素
除了上述各種類型的海冰以外,主要考慮海水溫度、下雪或下霧導致的能見度低下、甲板和海冰積雪、冰區不同階段的海浪和涌浪、所在水域存在的典型洋流、極地海上動物等6種環境要素。
2.4 船模準備
模擬航行任務會用到PC6級和PC7級船舶類型,而破冰船類型采用PC3級船模自動航行,或由教練員、指定的破冰船學員團隊進行破冰引航。限于冰區航行仿真技術水平,可采用業務模擬、部分物理行為仿真和參數建模混合進行。在冰區模擬場景下,安全操縱船舶是模擬航行的重要內容,可通過跟蹤,記錄船舶在航行過程中的行為和狀態,包括螺旋槳、舵葉和船體完整度,位置、速度、航向、橫傾角、冰區綜合導航設備使用記錄和語音對話等數據,由此評估學員是否具備在冰區安全航行的能力。目前,國內外的航海模擬器能較好地仿真船舶姿態,包括位置、速度、航向和橫傾角等,但螺旋槳和舵葉受損后仿真船舶行為較難,至少應通過其他方式加以體現。
2.4.1螺旋槳受損船舶行為要求
在相同車鐘命令下,根據受損程度,輸出功率逐漸減少,按一定步長衰減,加車時間變長,能向使用人員呈現視覺和聽覺感受,轉速相應發生變化、振動感(根據受損情況)和模擬駕駛室內環境聲音發生改變等,直至最終失去動力。
2.4.2舵葉受損船舶狀態要求
在相同航行環境下,按舵葉變形損壞的程度或形式,使舵效變差,用更大的舵角才能達到預期,無法按使用人員的經驗和習慣操舵,船舶的旋回要素發生變化,直至沒有舵效。
2.4.3船體損壞船舶姿態要求
由于船體受冰撞擊時的應力計算較為復雜,建議在設置冰情參數時,根據沿線的冰類型、厚度和硬度等參數,結合撞擊時船舶的質量和航速計算相應受力情況,映射為簡化船體包圍盒的損壞程度,直至進水傾斜,甚至沉沒。
不同品牌的模擬器采用不同的模擬或仿真算法,操作方法也各不相同,但建議在參數化航行任務階段,在模擬器的教練員端或獨立的自動評估系統中對上述參數進行設置。
2.5 輔助資料準備
準備在訓練過程中會用到的典型冰圖、必要設備和圖書資料,包括:在模擬駕駛室內提供冰情資料,如不來梅冰圖、光影圖和合成孔徑雷達(Synthetic Aperture Radar, SAR)圖像;運用電子版資料在雷達或電子海圖上自動疊加呈現,為學員提供分析行進方向的資料。雷達模擬器需提供相應冰區的雷達回波;電子海圖模擬器上呈現當前位置的水上、水下要素和冰情資料;測深儀實時跟蹤當前位置的水深變化,以培養學員在海測數據不充分時的安全意識,如配置冰雷達和水下探冰設備的模擬器,也可準備模擬信號,為冰山識別提供更逼真的訓練環境。這些準備是基于真實航行環境簡化設計的,會受限于各培訓機構使用的模擬器功能完善度,但基本的冰況、天空與海面基本要素和模擬駕駛室常用導航設備是必要的。
3 模擬航行的組織和評估
3.1 模擬航行組織
IMO 示范課程7.11建議基本培訓總課時為34個課時,模擬器實操課時為7個課時。考慮國內船舶操縱模擬器試驗課時的習慣安排和培訓場地船舶操縱模擬器最低配備要求(1艘主本船和4艘副本船)的客觀條件,模擬航行課時安排為8個課時,為期1 d,具體設計見表2。
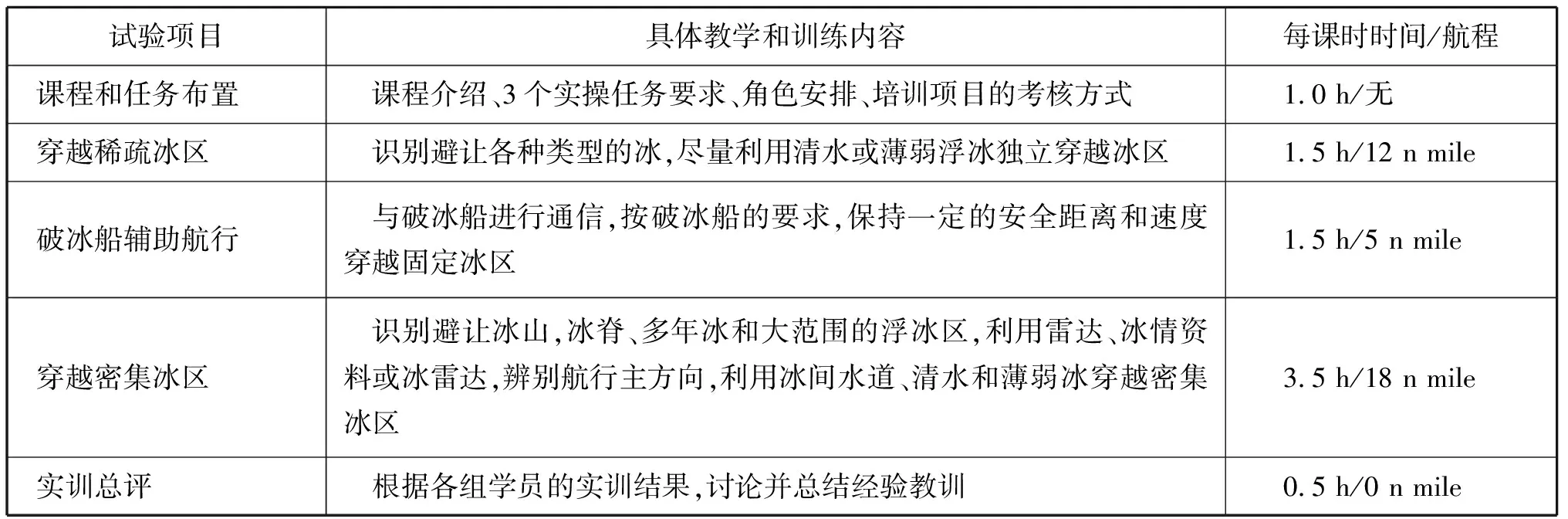
表2 模擬器實訓課時安排
根據3個訓練任務的要求,在極區船舶航行模擬器上設置好相應的訓練水域、各種冰況、通航環境要素和相應的動態參數等練習場景。以4艘副本船為1組,每組4~5位學員的方式,調用相應冰級的船模,根據訓練任務要求設置好船舶的初始位置,繪制好初始航線,完成后命名保存練習,按時間安排組織模擬航行如表2所示,具體可根據在航海模擬器上進行的綜合實踐教學方法安排。[15]
3.2 評估指標和流程
模擬極地冰區航行主要用于訓練學員在冰區中安全航行,在有限的時間內避開冰山、大范圍浮冰等危險冰情,沿著要求的大致方向安全穿越冰區,未造成嚴重的船舶損壞。評估時主要評估受訓學員的冰區綜合導航能力、危險冰情識別能力、冰區中船舶操縱能力和在破冰船輔助下的航行能力等4個方面的適任能力,見表3。
在具體評估時,可根據上述評估指標進行人工評估。同時,國家海事局新標準要求的航海模擬器必須具備自動評估功能,在航海模擬器上進行實操培訓也應采用自動評估的方式。但是,傳統的自動評估方法多利用最后階段的實操評估考試數據進行評價,未考慮學員平時的訓練質量。在團隊前期實訓項目ECDIS、全球海上遇險與安全系統(Global Maritime Distress and Safety System, GMDSS)、航線設計航海儀器船舶駕駛臺資源管理(Bridge Resources Management, BRM)等模擬器訓練自動評估方法[16]的基礎上,借鑒神經網絡在飛行模擬器訓練質量智能評估[17]的成功應用和航海模擬器智能評估中的應用新思路[18],提供一種基于神經網絡的智能評估方法。
該方法連續跟蹤學員操作過程中的登錄退出行為、儀器使用、車舵操作和語音等記錄,自動生成學員實訓過程數據庫和上述評估指標,按以下方法生成評估模型:
1)通過前期處理和歸一化操作后形成神經網絡輸入層輸入數據Xi。
2)4種適任能力分值作為輸出層的輸出數據Ok。
3)中間隱藏層與輸入和輸入層間的權重分別為Wij和Wjk。
4)專業評估人員對上述抽樣操作數據(樣本數據)進行人工評分,其結果作為Ot。
5)以Sigmoid函數作為傳遞函數或激活函數進行試驗 (yi為各層網絡輸出,xi為各層網絡輸入),表達式為
sigmoid(y1,y2,y3,…,yn)=1/(1+exp(-X(x1,x2,x3,…,xn)))
(1)
6)網絡結構采用常用的3層網絡結構,輸入Xi、Wij和Wjk之后,計算輸出為Ok,表達式為
(2)
7)梯度下降的方法較多,試驗采用誤差的平方E=(Ot-Ok)2作為剃度下降方法,以盡量減小超調。對E進行微分處理之后得到每次調整中間層和輸出層間的權重,輸入層和中間層的權重調整與此類似,表達式為
(3)
式(3)中:α為學習率;Oj為中間層輸出。
通過對輸入樣本進行多次學習,自動調整Wij和Wjk,得到符合誤差要求的2個權重矩陣—評估模型,將2個權重矩陣和學員實時關鍵指標矩陣Xi代入式(3),實時計算出學員的階段性成績,流程見圖5。
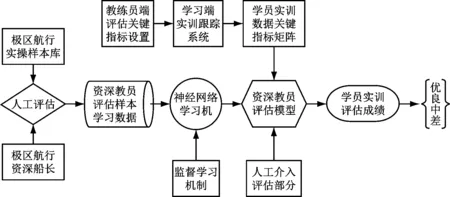
圖5 自動評估方法的基本流程
4 結束語
本文以模擬極區水域船舶航行的船舶操縱模擬器為研究對象,在國際公約和示范課程的框架下,借鑒國外極區水域航行模擬操作統計數據和極區船舶事故資料,結合我國南北極科考船航行經驗,設計極區水域船舶模擬航行的船舶操縱培訓內容、模擬航行任務、虛擬場景布置方案、模擬航行質量的關鍵性評估指標和基于航行過程的自動評估方法,為國內冰區航行的履約培訓、評估考試和相應模擬器的開發提供參考,尚未對自動評估方法涉及的神經網絡學習機制和獲取自動評估模型的算法進行詳細的介紹,尤其是學習樣本數據獲取、自動學習算法實現等內容,這將在以后的工作中深入研究。
猜你喜歡
中小學教師培訓(2022年10期)2022-10-15 02:16:04
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
辦公室業務(2020年18期)2020-09-29 12:15:58
家庭影院技術(2020年6期)2020-07-27 01:37:42
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
勞動保護(2019年7期)2019-08-27 00:41:26
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
體育師友(2011年5期)2011-03-20 15:29:53
