基于AIS數據的交匯水域船舶會遇態勢辨識
2021-03-10 13:31:32李文楷張春瑋
中國航海 2021年1期
馬 杰, 李文楷, 張春瑋, 張 煜
(武漢理工大學 a.航運學院; b.內河航運技術湖北省重點實驗室;c.國家水運安全工程技術研究中心; d.物流工程學院, 武漢 430063)
船舶會遇問題是海上船舶交通的研究熱點[1],是確定船舶避讓責任的重要依據和前提。[2]船舶會遇態勢是船舶在航行過程中從不同方向相互駛近形成的會遇局面,一般分為對遇態勢、交叉態勢和追越態勢。[3]在交通密度大、態勢復雜的交匯水域,若能準確辨識船舶會遇態勢,將對交匯水域的交通安全監管和降低船舶碰撞事故率產生重要的現實意義和應用價值。[4]
近年來,船舶自動識別系統(Automatic Identification System, AIS)[5]在海上交通控制和監控中得到廣泛的應用,AIS也成為研究船舶會遇態勢的重要工具。現有基于AIS數據的會遇態勢研究主要是從空間角度展開利用統計分析、分布擬合等方法提煉船舶會遇特征,挖掘船舶會遇行為規律。冮龍暉等[6]從最近會遇距離和兩船航向夾角等會遇特征參量中提取船舶會遇信息;朱姣等[7]構造由船舶位置、航速和航向組成的船舶航行狀態空間模型辨識船舶會遇態勢;甄榮等[8]利用AIS數據提取船舶經緯度信息,通過計算船舶間的相對距離并利用密度聚類方法進行船舶空間位置聚類分析,制定船舶會遇態勢判別規則;ZHANG等[9]通過構建兩船距離、航向差和相對航速的擬合方程對船舶會遇態勢和潛在的碰撞風險進行描述。從空間角度進行會遇特征分析和會遇態勢辨識,忽略了會遇過程的時空變化特性,特別是在通航環境復雜的交匯水域,船舶機動轉向的情況較多,船舶運動表現出較大的不確定性將導致會遇特征更大范圍的波動。僅考慮會遇船舶間的空間約束和位置特征進行會遇態勢判別,會發生誤判的情況。馬杰等[10]考慮會遇的時空變化,提出一種船舶會遇特征序列構建方法并利用支持向量機(Support Vector Machine, SVM)實現船舶會遇態勢信息的分類提取,但該方法需利用完整的船舶會遇軌跡信息,無法用于船舶會遇態勢的在線辨識。
鑒于以上不足,本文重點考慮船舶會遇過程的時空演化特性,從AIS產生的海量數據中提取船舶航向差和相對距離作為會遇特征并構建會遇特征序列,建立基于支持向量機與貝葉斯濾波(Support Vector Machine and Bayesian Filter, SVM-BF)[11]的會遇態勢辨識模型。通過建立BF與會遇態勢的對應關系,使改進的SVM-BF模型能滿足交叉、對遇和追越等不同會遇態勢辨識的需要,有效提高辨識準確率,為船舶會遇危險局面分析與研判提供一種智能化方法。
1 會遇特征序列構建
1.1 會遇特征參量計算
會遇幾何模型是研究在會遇過程中兩船行為的重要方法。[12]會遇幾何模型將會遇船舶視作以一定速度做矢量運動的2個質點,因此,可借助平面幾何的相關知識來計算在會遇過程中的會遇特征參量。[13]2艘船舶的會遇場景見圖1,在會遇過程中,相對距離的最小值(最近距離)可反映出兩船接近的程度,若最近距離大于一定范圍,則兩船之間發生不會遇,通常將6 n mile作為會遇局面的限定值。[14]但僅考慮距離特征是不夠的,辨識會遇態勢還需考慮2艘船舶的相對方位。航向差是判別船舶會遇態勢的重要依據,由于大多數船舶的對地航向都能通過全球定位系統(Global Positioning System, GPS)有效地獲取,因此,采用對地航向計算兩船的航向差作為會遇船舶相對方位的表征。[15]綜合以上因素,確定以會遇船舶的相對距離與航向差作為會遇特征參量。設本船的經緯度坐標為(lngo,lato),速度標量為vo,對地航向為φo,目標船的經緯度坐標為(lngt,latt),速度標量為vt,對地航向為φt。2種會遇特征參量為

圖1 2艘船舶的會遇場景

(1)
2)兩船航向角φo和φt延長線交于點Q,航向差為
(2)
從AIS原始數據中提取會遇船舶軌跡數據(包括經緯度、航速和航向等),考慮AIS數據缺失和不同步等問題,對軌跡進行插值、同步等預處理,保證每秒時間點上都有數值,最后利用式(1)和式(2)計算會遇船舶2個特征量。
1.2 會遇特征序列提取
船舶會遇是一個時空演化的過程,因此,需同時從空間和時間2個方面對其進行考量。通過上述會遇特征參量的計算,獲得會遇船舶在空間上的表征。進一步考慮會遇特征在時間上的變化。首先,從會遇初始階段,以10 s為采樣間隔,對其內的相對距離和航向差分別計算平均值,得到2維均值向量作為會遇特征向量。考慮到2種會遇特征參量的量綱存在差異,對其進行標準化處理為
(3)
(4)
[D1A1…DkAk…DmAm]
(5)
設數據集中包含的會遇船舶數量為s對,則可提取s條會遇特征序列構成會遇特征矩陣Wm,s為
(6)
2 基于SVM-BF會遇態勢辨識
2.1 辨識模型
SVM[17]是一種基于邊緣最大化的監督學習算法,其目標是找到一個超平面使不同類別的數據點之間的分離間隔最大化。其基本原理是利用核函數[18]的方法將數據從低維度投影到高維度,實現數據點在高維空間的線性可分。僅使用SVM辨識會遇態勢建模容易出現誤判虛警的情況。針對該問題,采用SVM與BF相結合的方式進行辨識建模,在現有SVM-BF[19]的基礎上,通過設計SVM-BF中BF與會遇態勢的對應關系,使每個BF對應一種船舶會遇態勢,將辨識船舶會遇態勢設計成一個二分類問題,從而實現對交叉態勢、對遇態勢和追越態勢等態勢,模型框架見圖2。

圖2 基于SVM-BF的船舶會遇態勢辨識模型框架
模型的訓練過程如圖2所示,首先從AIS數據集中構建會遇特征矩陣Wm,s并將其劃分為訓練集特征矩陣Tm,n和測試集特征矩陣Tm,n*。tm,j表示訓練集中第j對船舶的會遇特征序列為
tm,j=[f1,j…fk,j…fm,j],fk,j=[Dk,jAk,j]
(7)
式(7)中:根據fk,j可確定Ck,j的類別,Ck,j∈{交叉,對遇,追越,其他(非會遇)}。隨后對SVM每個判別模塊逐次訓練,將fk,j與Ck,j輸入到SVM判別模塊(由3個SVM組成)中,得到每個SVM超平面的權重和偏置。訓練BF判別模塊(由3個BF組成)并確定每個BF判別模塊的閾值τ,不失一般性,3個BF判別模塊分別對應交叉態勢、對遇態勢和追越態勢。對應模型的測試過程如圖2所示,tm,j*為測試集中第j*對船舶的會遇特征序列,將tm,j*輸入到SVM判別模塊,SVM判別模塊會輸出第j*對船舶對應的會遇類別序列C為
C=[C1,j*…Ck,j*…Cm,j*]
(8)
將其作為BF判別模塊的輸入,并將每個BF判別模塊輸出的后驗概率與對應的閾值τ進行比較即可實現對交叉態勢、對遇態勢和追越態勢等態勢的辨識。
2.2 辨識算法
首先對SVM判別模塊進行訓練。在SVM判別模塊中,根據Tm,n中fk,j以及對應的Ck,j建立形如{fk,j,Ck,j}的數據對,并在每個SVM判別模塊中按照Ck,j的類別賦予Ck,j標簽。在第1個SVM判別模塊中,當Ck,j屬于交叉時,Ck,j被標記為1,否則,Ck,j被標記為-1。將這些數據對作為第1個SVM判別模塊的輸入。在Ck,j(wΤfk,j+b)≥1的約束條件下,目標函數為
(9)
式(9)中:w和b為超平面的權重和偏置。由于訓練數據通常是線性不可分的,因此,需要尋找一個核函數將這些低維數據映射到更高維度的空間,即
φ(fk,j)×φ(fq,l)=K(fk,j,fq,l)
(10)
結合拉格朗日乘子法,有
(11)
對式(11)進行求解為
(12)
由式(9)~式(12)可得到第1個SVM超平面的權重與偏置,實現第1個SVM判別模塊的訓練。初始化Ck,j并重新確定Ck,j標簽,當Ck,j屬于對遇時,Ck,j被標記為1,否則,Ck,j被標記為-1,將數據對輸入到第2個SVM判別模塊中,計算相應超平面的權重與偏置,以完成第2個SVM判別模塊的訓練。依此類推,重新標記Ck,j并將標記好的數據對輸入到第3個SVM判別模塊中,計算第3個SVM超平面的權重與偏置,結束SVM判別模塊的訓練過程。
隨后對BF判別模塊進行訓練。建立由Ck,j組成的會遇類別序列C作為BF判別模塊的輸入,第1個BF判別模塊會求解交叉態勢對應的后驗概率密度函數P(θ|C)。由于BF是對Ck,j進行二分類,而直接使用二項分布較難求解P(θ|C),考慮到共軛分布不僅可求出后驗分布的封閉形式,同時,也保留先驗分布的性質,使估計概率更加準確。而β分布與二項分布是一組共軛分布,因此,采用β分布作為θ的先驗分布[20]為
(13)
式(13)中:β分布的超參數a和b為每種會遇態勢的“置信度”權重,即Ck,j所屬的會遇態勢的有效觀測值,a和b初始值設定為1,表示θ在初始時刻服從均勻分布。Γ(a)是Gamma函數為

(14)
θ的似然函數服從二項分布為
(15)
根據貝葉斯公式,θ的后驗分布P(θ|C)可通過似然函數bin(u|v,θ)與先驗分布β(θ|a,b)相乘得到[21]:
(16)
當會遇類別序列C中的Ck,j為交叉時,v=1,u=1;Ck,j為非交叉(對遇,追越和其他(非會遇))時,v=1,u=0。隨著每次輸入Ck,j,a和b的表達式更新為a=a+u,b=b+v-u。通過計算P(θ|C)的期望值來累積辨識tm,j是否屬于交叉態勢為
E(θ|C)=P(tm,j=交叉態勢|C)=
(17)
將E(θ|C)與τ1進行比較,如果E(θ|C)>τ1,第1個BF判別模塊會將第j對船舶的會遇態勢辨識為交叉態勢。與第1個BF判別模塊相同,第2個BF判別模塊也會根據E(θ|C)和τ2的關系辨識第j對船舶是否為對遇態勢。依此類推,第3個BF判別模塊會根據E(θ|C)和τ3的關系辨識第j對船舶是否為追越態勢。如果3個BF判別模塊的期望都小于閾值,SVM-BF會將第j對船舶辨識為其他(非會遇)。遍歷Tm,n中會遇類別序列C,得到BF判別模塊對交叉態勢、對遇態勢和追越態勢等態勢的整體辨識準確率。當整體辨識準確率達到90%時,可使SVM-BF模型獲得良好的訓練效果和泛化性能。因此,在對BF判別模塊訓練的過程中,如果BF判別模塊對交叉態勢、對遇態勢和追越態勢的整體辨識準確率小于90%,則需分別修改閾值τ1、τ2和τ3的數值,并再次遍歷Tm,n中的會遇類別序列C,重復上述步驟,直到BF判別模塊對每種會遇態勢的整體辨識準確達到90%,才可結束BF判別模塊的訓練過程。從Tm,n*中選取tm,j*輸入SVM判別模塊,得到tm,j*對應的會遇類別序列C,將其輸入到BF判別模塊得到第j*對船舶的會遇態勢,實現船舶會遇態勢辨識(測試)。基于SVM-BF的會遇態勢辨識偽碼如下:
算法名稱:基于SVM-BF的船舶會遇態勢辨識
輸入:測試集矩陣Tm,n*,閾值τ1、τ2和τ3
BEGIN
1.FORj*INn*
2.選取tm,j*=[D1,j*A1,j*…Dk,j*Ak,j*…Dm,j*Am,j*]
3.令fk,j*=[Dk,j*Ak,j*],tm,j*=[f1,j*…fk,j*…fm,j*]
4.初始化會遇類別序列C
5.FORkINm
6.輸入fk,j*到SVM判別模塊
7.根據式(10)~式(12)計算的w和b得到Ck,j*
8.添加Ck,j*到C
9.END FOR
10.FORi=1 TO 3 DO
11.輸入C到第i個BF判別模塊
12.根據式(16)~式(17)計算E(θ|C)
13.IFE(θ|C)>τi
14.IFi=1
15.RETRUN 第j*對船舶屬于交叉態勢
16.IFi=2
17.RETRUN第j*對船舶屬于對遇態勢
18.IFi=3
19.RETRUN 第j*對船舶屬于追越態勢
20.END FOR
21.RETRUN第j*對船舶屬于其他(非會遇)
22.END FOR
3 試驗與分析
3.1 試驗水域
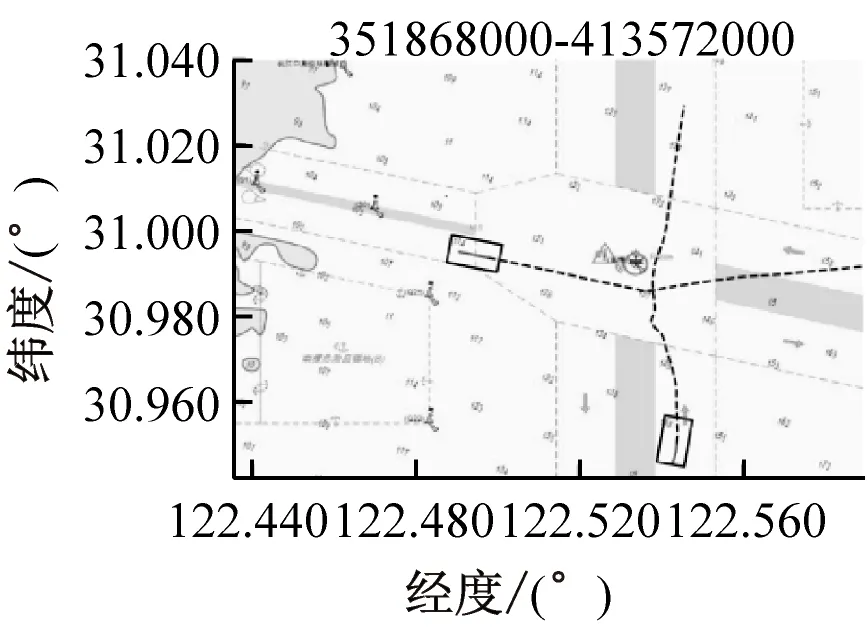
選取長江口南槽交匯水域作為研究對象,見圖3,該水域船舶交通流量較大且船舶發生會遇的情況頻繁,是典型的交匯水域,辨識該水域進行會遇態勢的研究具有代表意義。收集該水域2017年7月—2017年11月的AIS數據開展模型訓練和算法驗證。提取船舶會遇態勢信息并利用人工標注的方式確定船舶會遇態勢類別,共得到1 200條船舶會遇數據,其中:訓練集有800條數據,包含3種船舶會遇態勢以及其他(非會遇)的數據各200條;測試集則包含每類數據各100條,共400條數據。進行數據預處理和特征提取并將時間窗口長度設置為150 s,因此,每條會遇特征序列中包含15個2維均值向量。
3.2 實例分析
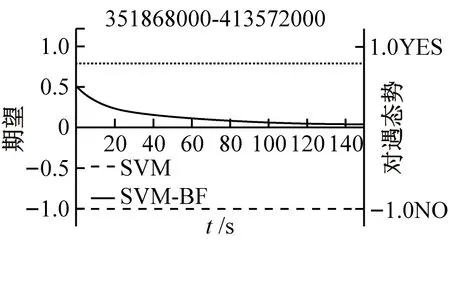
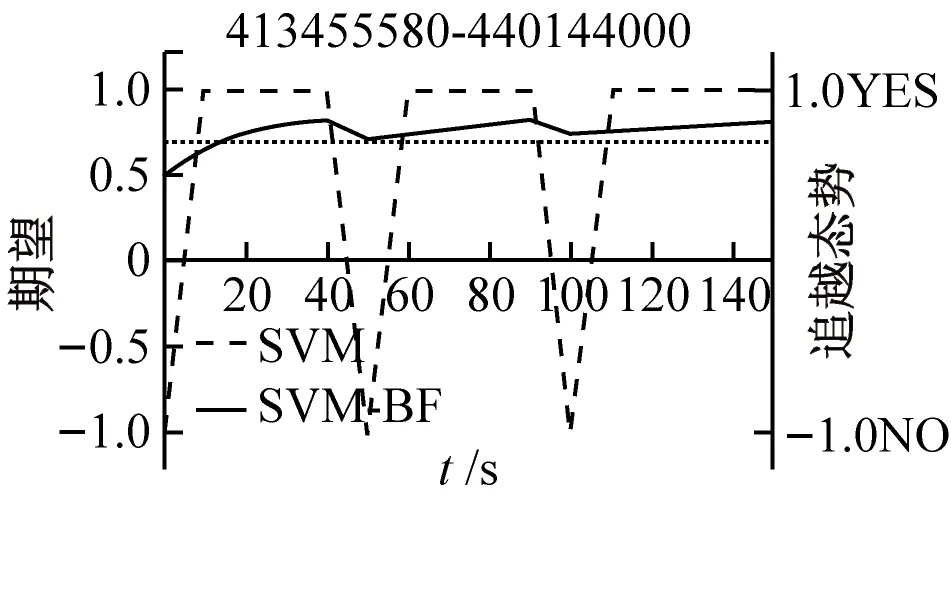
使用訓練集數據訓練SVM-BF模型,根據辨識算法中閾值的確定規則,得到τ1、τ2和τ3分別為0.7、0.8和0.7。分別使用SVM模型和SVM-BF模型對測試集進行測試。2種模型對5種場景實例的船舶會遇態勢辨識結果見圖4。交叉、對遇、追越、其他(非會遇)、有避讓的交叉場景實例以及2種模型對不同場景實例的會遇態勢辨識結果見圖4a~圖4t,圖中實線為SVM-BF模型辨識結果的取值范圍由左邊的縱坐標軸確定;虛線為SVM模型的辨識結果并由右縱坐標軸確定,當取值1.0(YES)時為SVM模型正確辨識會遇態勢,當取值-1.0(NO)時為SVM模型產生錯誤的辨識結果;水平虛線則表示τ1、τ2和τ3,5個場景實例中方框對應的軌跡段的窗口長度為150 s。

圖3 長江口南槽交匯水域
1)對于交叉場景實例,由圖4b~圖4d可知:SVM模型在70 s時產生誤判,辨識結果直到80 s后才趨于穩定,最終SVM模型會將此場景實例辨識為交叉態勢。相比于在對交叉態勢辨識時,SVM-BF模型產生的期望E(θ|C)在20 s時已超過τ1,雖然E(θ|C)在60~80 s時出現波動但始終大于τ1。因此,SVM-BF模型會在20 s時將此場景實例辨識為交叉態勢。
2)對于對遇場景實例,由圖4f~圖4h可知:2種模型在所有的采樣點都產生了正確判斷,2種模型都會將此場景實例辨識為對遇態勢。
3)對于追越場景實例,由圖4j~圖4l可知:SVM模型在50 s和100 s 2個時刻產生誤判,辨識結果直到110 s后才穩定。相比于SVM-BF模型在辨識追越態勢時,雖然期望曲線也在這2個采樣點出現震蕩,但E(θ|C)始終大于τ3所在的水平線,因此,SVM-BF模型會將此場景實例辨識為追越態勢。
4)由圖4n~圖4p可知:在對其他(非會遇)場景實例辨識時,由于存在頻繁的轉向行為,SVM模型產生大量的誤判,并做出錯誤的辨識結果。而SVM-BF模型可對SVM產生的初判結果做出累積判別,雖然期望曲線出現持續的波動,但E(θ|C)一直都小于τ1、τ2和τ3。因此,SVM-BF模型會將此場景實例辨識為其他(非會遇)。
5)對于有避讓的交叉場景實例,由圖4r~圖4t可知:船舶避讓行為使得SVM模型在120 s后都做出誤判,相比于在辨識交叉態勢時,雖然SVM-BF模型的期望曲線在120 s時也出現下降,但E(θ|C)始終位于τ1所在的水平線之上,因此,SVM-BF模型會將此場景實例辨識為交叉態勢。由圖4a~圖4t可知:在對交叉、對遇和有避讓的交叉3種場景實例的會遇態勢進行辨識時,SVM-BF模型產生的累積期望在第2個采樣時刻已經超過閾值。
因此,將SVM-BF模型應用到實船避碰時,超過閾值的辨識結果可幫助船長辨識船舶的會遇態勢。此外,交匯水域存在多船會遇的情況,多船會遇態勢辨識的通常采用兩兩船舶依次判斷,本文所提出的方法雖然基于兩船之間進行會遇態勢辨識,但很容易應用到多船場景。
a)交叉場景實例

b)辨識交叉態勢
c)辨識對遇態勢

d)辨識追越態勢

e)對遇場景實例

f)辨識交叉態勢

g)辨識對遇態勢

h)辨識追越態勢

i)追越場景實例

j)辨識交叉態勢

k)辨識對遇態勢
l)辨識追越態勢

m)其它(非會遇)場景實例

n)辨識交叉態勢

o)辨識對遇態勢

p)辨識追越態勢

q)有避讓的交叉場景實例

r)辨識交叉態勢

s)辨識對遇態勢

t)辨識追越態勢
3.3 總體結果
2種模型對測試集進行辨識的總體結果見表1,表1中的準確率是2種模型在不同窗口長度下的辨識結果。例如,在90 s時間窗口中,SVM和交叉對應的百分數表示SVM在窗口長度為90 s時對交叉態勢的辨識準確率。由表1可知:在不同場景下,SVM-BF模型在各個時間窗口下的準確率都要高于SVM模型,尤其對其他(非會遇)場景,SVM-BF仍能以超過91%的準確率對其進行辨識。此外,2種模型辨識的準確率都隨著窗口長度的增加而提高,這也與實際情況相吻合,更長的時間序列包含更豐富的會遇態勢信息,因而模型的泛化能力也會相應的提高。

表1 2種模型的辨識結果
4 結束語
針對因交匯水域通航環境復雜易產生船舶會遇態勢的誤判問題,選取相對距離和航向差得到會遇船舶在空間上的表征,計算其均值向量并在時間軸上展開,構建會遇特征序列。使用會遇特征序列辨識船舶會遇態勢考慮會遇過程時空演化特性。聯合SVM與BF建立會遇態勢辨識模型,實現對SVM初步辨識結果的平滑濾波,消除誤判虛警的情況,提高辨識準確率。選取長江口南槽交匯水域的AIS數據開展模型和方法驗證,結果表明:SVM-BF能以較高準確率對交叉態勢、對遇態勢和追越態勢等態勢進行辨識。在SVM模型產生誤判的情況下,SVM-BF模型依然可根據累積的期望做出正確的辨識結果。提出的模型和方法可應用于交匯水域的會遇態勢自動識別與預警。今后可在辨識模型中考量更多的會遇特征參量,并進一步探究影響會遇態勢演化的相關因素,以提升模型的準確性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
