不確定性負虛系統(tǒng)的絕對穩(wěn)定性研究
2021-03-11 13:07:28陳陣
測控技術(shù) 2021年2期
關(guān)鍵詞:系統(tǒng)
陳 陣
(中國科學技術(shù)大學 信息科學技術(shù)學院,安徽 合肥 230026)
Lanzon和Peterson最早提出負虛系統(tǒng)這一概念,并且引起了很多系統(tǒng)理論研究者的關(guān)注[1-4]。在實際工程中,通過選取合適的系統(tǒng)狀態(tài),系統(tǒng)的傳遞函數(shù)將表現(xiàn)出負虛性質(zhì),例如大型車隊的編組控制、原子力顯微鏡納米懸梁臂定位系統(tǒng)、機械硬盤驅(qū)動器、Sallen-Key低通濾波器等都可以建模成具有負虛性質(zhì)的模型[5-7]。負虛系統(tǒng)考慮系統(tǒng)頻率響應(yīng)M(jω)的虛部的性質(zhì),要求對于所有的ω∈(0,∞),j(M(jω)-M(jω)*)≥0。
線性時不變(LTI)多輸入多輸出(MIMO)負虛系統(tǒng)互連的魯棒穩(wěn)定性已經(jīng)被廣泛研究[1-2,8-9]。并且,得到了傳遞函數(shù)為M(s)的負虛的被控對象和傳遞函數(shù)為N(s)的嚴格負虛的控制器的正反饋互連系統(tǒng)(如圖1所示)穩(wěn)定的充分必要條件,即DC增益條件[1]:
λmax(M(0)N(0))<1
(1)
式中,λmax(·)為一個只有實特征值的矩陣的最大的特征值。
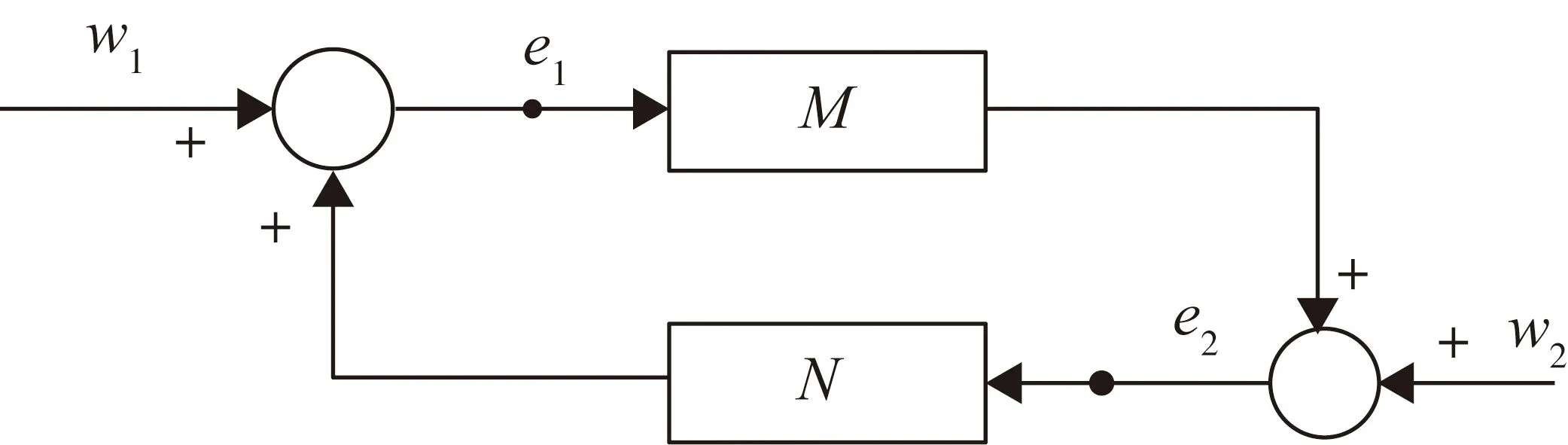
圖1 負虛反饋控制系統(tǒng)
近年來,負虛系統(tǒng)理論的研究被拓展到了無損負虛系統(tǒng)[10]、有混合性質(zhì)的互連系統(tǒng)的穩(wěn)定性研究[11]、控制器設(shè)計和性能分析[12]等各個方面。其中,假設(shè)所有狀態(tài)都可用于狀態(tài)反饋,針對具有嚴格負虛不確定性的系統(tǒng),Song等[12]提出了一種基于狀態(tài)反饋的系統(tǒng)魯棒靜態(tài)反饋綜合方法,這是唯一的關(guān)于具有非線性的負虛性質(zhì)的研究,但由于要求非線性部分具有嚴格負虛性質(zhì),具有較高的保守性。
絕對穩(wěn)定性定理保證了反饋路徑包含動態(tài)線性時不變系統(tǒng)和反饋路徑包含無記憶非線性系統(tǒng)的反饋系統(tǒng)的穩(wěn)定性。因此,絕對穩(wěn)定性定理為具有給定集合不確定性的系統(tǒng)的魯棒穩(wěn)定性的充分條件[13]。對絕對穩(wěn)定條件的進一步研究考慮限制在單調(diào)的、基于擴展的Lur’e-Postnikov李雅普諾夫函數(shù)的斜率有界時不變非線性性[14]。在實際工程系統(tǒng)中,普遍存在著斜率有界的無記憶不確定性,這是影響動態(tài)系統(tǒng)性能的一個重要因素[15-22]。因此,具有限斜非線性的系統(tǒng)的絕對穩(wěn)定性受到越來越多的關(guān)注[23]。
本文考慮一個負虛的被控對象,一個斜率有界、無記憶的不確定性和一個嚴格負虛的控制器互連的系統(tǒng)。提出的定理表明,對于上述系統(tǒng),如果一些線性矩陣不等式成立,則閉環(huán)系統(tǒng)是絕對穩(wěn)定的。本文使用環(huán)變換的方法,擴展了無源性定理的效用。利用這些方法,整個閉環(huán)系統(tǒng)采用分解形式。在分解部分的基礎(chǔ)上,建立了連通的全局漸近收斂性,并建立了一個Lur’e-Postnikov李亞普諾夫函數(shù),進而驗證了系統(tǒng)的絕對穩(wěn)定性。在負虛系統(tǒng)和不確定性已知的情況下,得到了使系統(tǒng)絕對穩(wěn)定的嚴格負虛控制器的DC增益條件。
1 問題描述
1.1 負虛系統(tǒng)
引理1[8]:設(shè)(A,B,C,D)是m×m維正則實有理傳遞函數(shù)矩陣R(s)的一個最小狀態(tài)空間實現(xiàn),其中A∈Rn×n,B∈Rn×m,C∈Rm×n,D∈Rm×m,則R(s)是負虛的,當且僅當:
① det(A)≠0,D=DT;
② 存在Y=YT>0,Y∈Rn×n,使得
AY+YAT≤0且B+AYCT=0
(2)
引理2[8]:設(shè)(A,B,C,D)是m×m維正則實有理傳遞函數(shù)矩陣R(s)的一個最小狀態(tài)空間實現(xiàn),其中A∈Rn×n,B∈Rn×m,C∈Rm×n,D∈Rm×m,則R(s)是負虛的,當且僅當:
①A是Hurwitz,rank(B)=rank(C)=m,D=DT;
② 存在Y=YT>0,Y∈Rn×n,使得
AY+YAT≤0且B+AYCT=0
(3)
1.2 斜率有界不確定性
將多個標量斜率有界的非線性以向量形式考慮在一起,將非線性算子的類[25]定義為
(4)
式中,AC(R+)為絕對連續(xù)函數(shù)f:R+→R構(gòu)成的空間。由于在變換后的非線性中需要建立一個無源關(guān)系,因此提出了扇形變換。

下面的定理給出了斜率有界無記憶的非線性性和無源算子之間的關(guān)系。



圖2 多個解耦非線性性,M=diag(μ1,μ2,…,μm)
定義2[26]:對于一個由線性系統(tǒng)部分和非線性部分反饋互連的系統(tǒng),如果對于任意滿足扇形條件的非線性性,該系統(tǒng)在原點是全局一致漸進穩(wěn)定的,則稱這個系統(tǒng)是絕對穩(wěn)定的。
本文研究的是帶有不確定性的系統(tǒng)的絕對穩(wěn)定性,如圖3所示。假設(shè)外部輸入為0,其中x∈Rn,xc∈Rnc;u,y∈Rm,uc,yc∈Rmc。
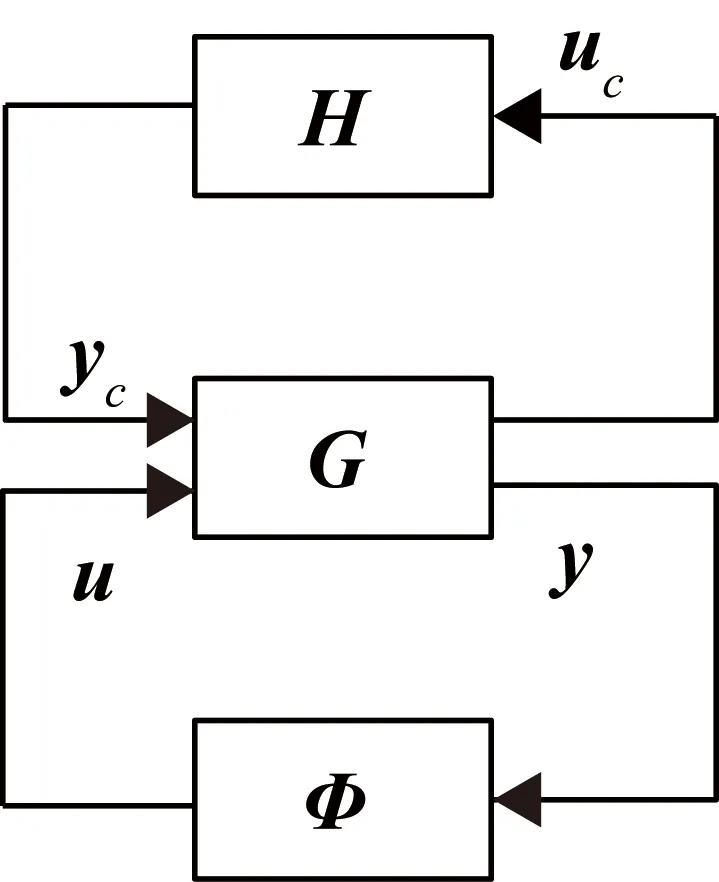
圖3 帶有斜率有界非線性性的反饋系統(tǒng)
圖3系統(tǒng)狀態(tài)空間方程為
(5)
1.3 環(huán)變換

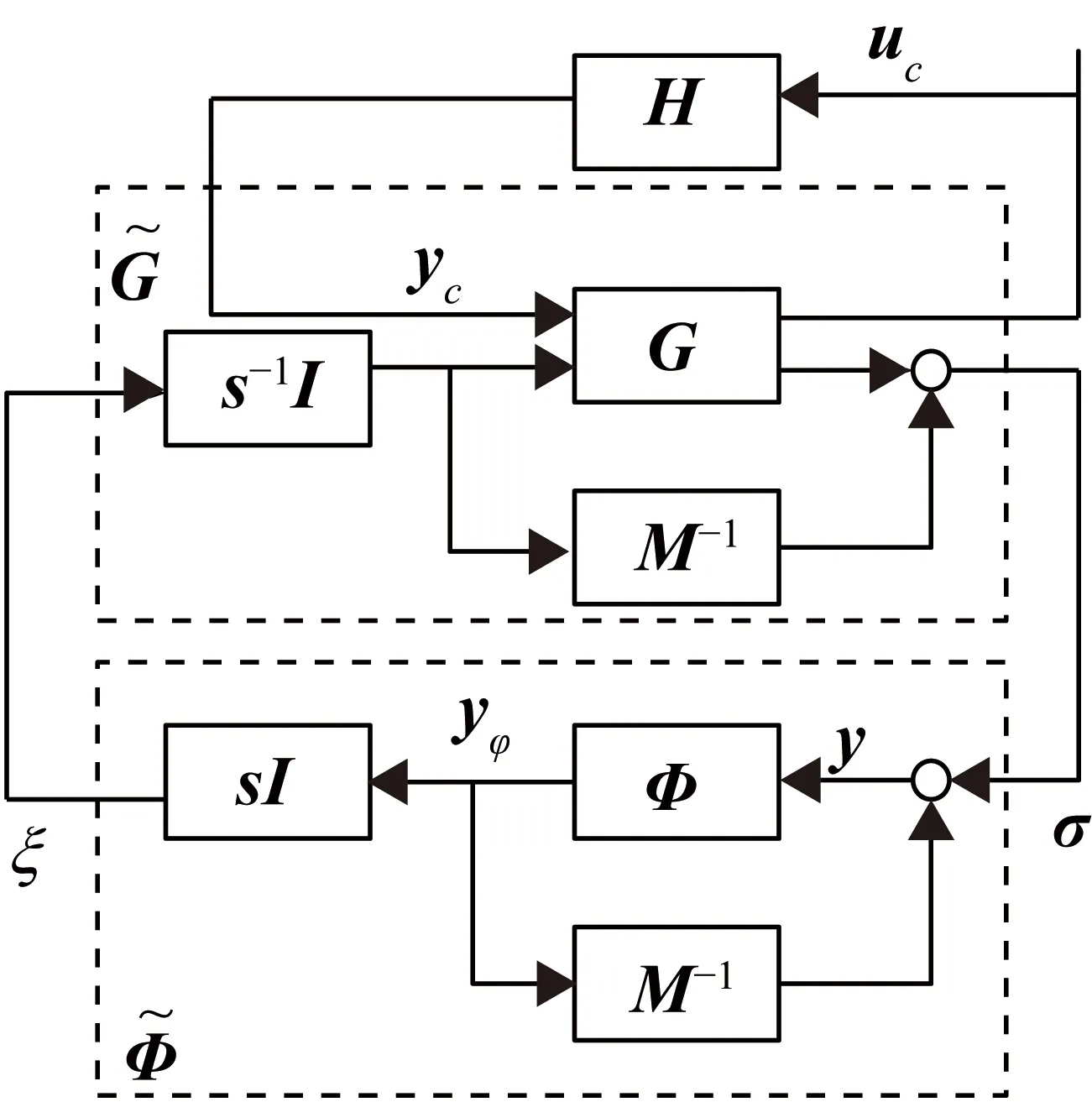
圖4 環(huán)變換后的系統(tǒng)
G~(s)=ABB1C00C10-M-1 00I0I0I00
(6)
式中,M為一個嚴格正定的對角陣。圖4中環(huán)變換后系統(tǒng)的狀態(tài)方程為
(7)


G~(s)=TA~T-1TB~C~T-1D~

(8)

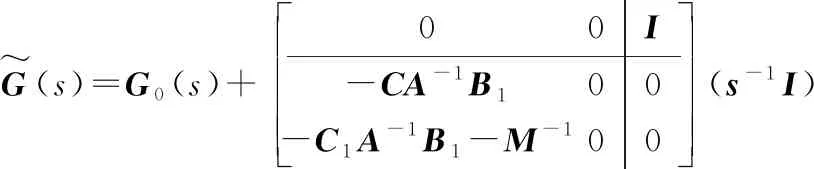
G~(s)=G0(s)+00I-CA-1B100-C1A-1B1-M-100 (s-1I)
(9)
因此定義:
z(t)=x(t)+A-1B1η(t)
(10)
η(t)=ω(t)
(11)
用z和η替換x和ω,則互聯(lián)系統(tǒng)為
(12)
該互聯(lián)系統(tǒng)如圖5所示。
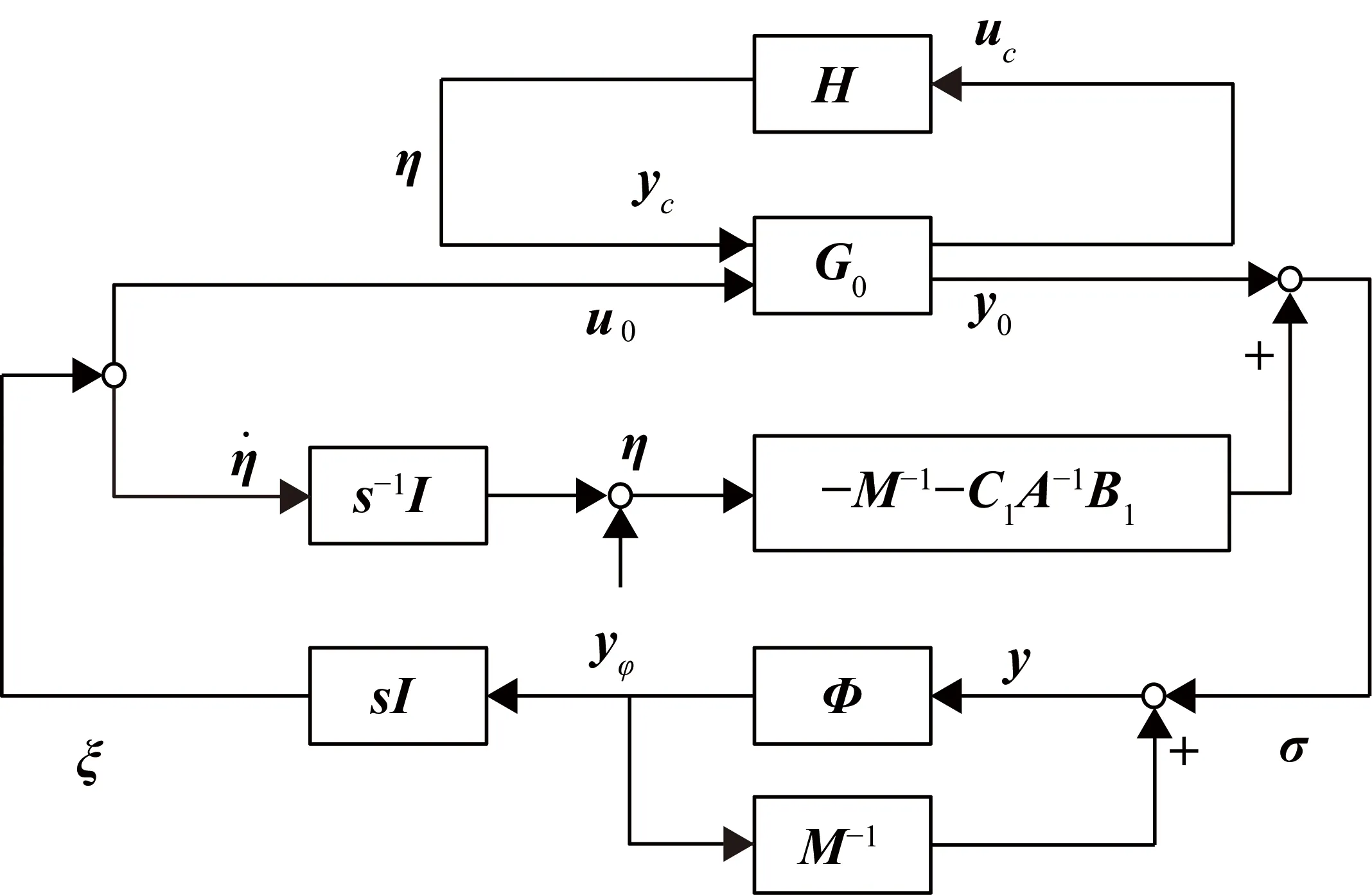
圖5 環(huán)變換、卡爾曼標準分解后的系統(tǒng)
該系統(tǒng)是系統(tǒng)(7),即圖4分解后的結(jié)果。因此,分析系統(tǒng)(5)的絕對穩(wěn)定性等價于分析系統(tǒng)(7)的絕對穩(wěn)定性,利用卡爾曼標準分解,轉(zhuǎn)化為分析系統(tǒng)(12)的絕對穩(wěn)定性。
2 系統(tǒng)穩(wěn)定性分析
對于由集合Φ的不確定性,負虛的被控對象和嚴格負虛的控制器構(gòu)成的系統(tǒng),給出了系統(tǒng)絕對穩(wěn)定性的條件和嚴格負虛控制器的DC增益條件。
定理1:考慮集合Φ的不確定性,令M∈Rm×m,是一個由不確定性構(gòu)成對角塊的嚴格正定的對角陣,負虛被控對象G(s)的最小狀態(tài)空間實現(xiàn)為(A,B,C,0),嚴格負虛控制器H(s)的最小狀態(tài)空間實現(xiàn)為(Ac,Bc,Cc,0)。則系統(tǒng)(5)絕對穩(wěn)定的充分條件是:存在對稱矩陣Y1,Y2>0使得
(13)
(14)
M-1+C1A-1B1>0
(15)
證明:為了證明系統(tǒng)(5)絕對穩(wěn)定,只需證系統(tǒng)(12)絕對穩(wěn)定。令ζ=(z,xc,ξ)T,使用如下的Lur’e-Postnikov李亞普諾夫函數(shù):
(16)
σTξ+ξTσ
=(Az+Byc+A-1B1ξ)TY1z+zTY1(Az+Byc+
ηT(M-1+C1A-1B1)ξ-ηT(C1A-1B1+M-1)Tξ-
ξT(C1A-1B1+M-1)η

其中,
(17)

注1:定理1給出了保證系統(tǒng)(5)絕對穩(wěn)定性的充分條件,這和文獻[25]中使用的方法相同,都是環(huán)變換。但是,文獻[25]研究的是負虛系統(tǒng)的絕對穩(wěn)定性。定理1給出的是負虛的被控對象、不確定性和嚴格負虛的控制器的互連作為系統(tǒng)的絕對穩(wěn)定性。
注2:針對非線性系統(tǒng)絕對穩(wěn)定性的研究,其絕對穩(wěn)定性條件建立于線性系統(tǒng)部分已知,非線性部分滿足一定的扇形條件的基礎(chǔ)上,這也是從實際應(yīng)用中得到的重要結(jié)果。因此,定理1的穩(wěn)定性判據(jù)要求系統(tǒng)滿足負虛性質(zhì)和斜率有界符合絕對穩(wěn)定性的判定方法。定理1要求已知負虛被控對象、嚴格負虛控制器和不確定性,但是對于任意滿足條件的負虛和嚴格負虛部分,以及斜率有界這一大類常見的不確定性(如中繼、飽和和量化等),該定理都適用。
接下來,考慮嚴格負虛控制器部分。如果負虛被控對象和不確定性部分是已知并且滿足一些條件的,那么嚴格負虛控制器只需要滿足一個DC增益條件,就可以使得整個系統(tǒng)穩(wěn)定。

H(0)-1+G(0)≤M-1
(18)
(19)
則系統(tǒng)(5)是絕對穩(wěn)定的。
證明:由定理1的證明,如果T≤0,則系統(tǒng)(5)絕對穩(wěn)定。顯然,由于(19)成立,只需證H(0)-1+G(0)≤M-1,那么(13)成立,則系統(tǒng)(5)是絕對穩(wěn)定的。
(20)
(21)
因此,
(22)

?
(23)
因為ATY1+Y1A≤0,所以式(23)成立。又因為
(24)

注4:推論給出了控制器的DC增益條件,滿足這一條件的所有嚴格負虛控制器都可以使得該系統(tǒng)絕對穩(wěn)定。也就是說,推論1要求負虛被控對象和不確定性是已知的,但對于廣泛存在的負虛系統(tǒng),只要當不確定性是斜率有界無記憶的,就可以得到其控制器條件。
3 例子與仿真驗證
本節(jié)給出兩個數(shù)值例子和仿真結(jié)果,用于驗證主要結(jié)論的正確性與有效性。
例1:考慮圖3所示的互聯(lián)系統(tǒng)(5),不確定性為一維的飽和度:

不確定柔性結(jié)構(gòu)運動的常微分方程為

對應(yīng)的狀態(tài)空間方程為
式中,x為系統(tǒng)狀態(tài);f為力的輸入;q為位移的輸出;系統(tǒng)矩陣為
不確定柔性結(jié)構(gòu)如圖6所示。
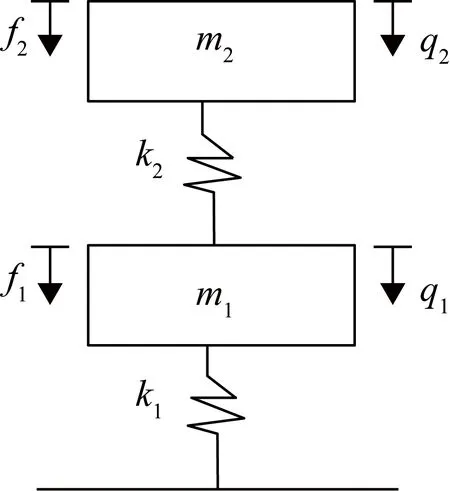
圖6 一個輕阻尼彈簧系統(tǒng)
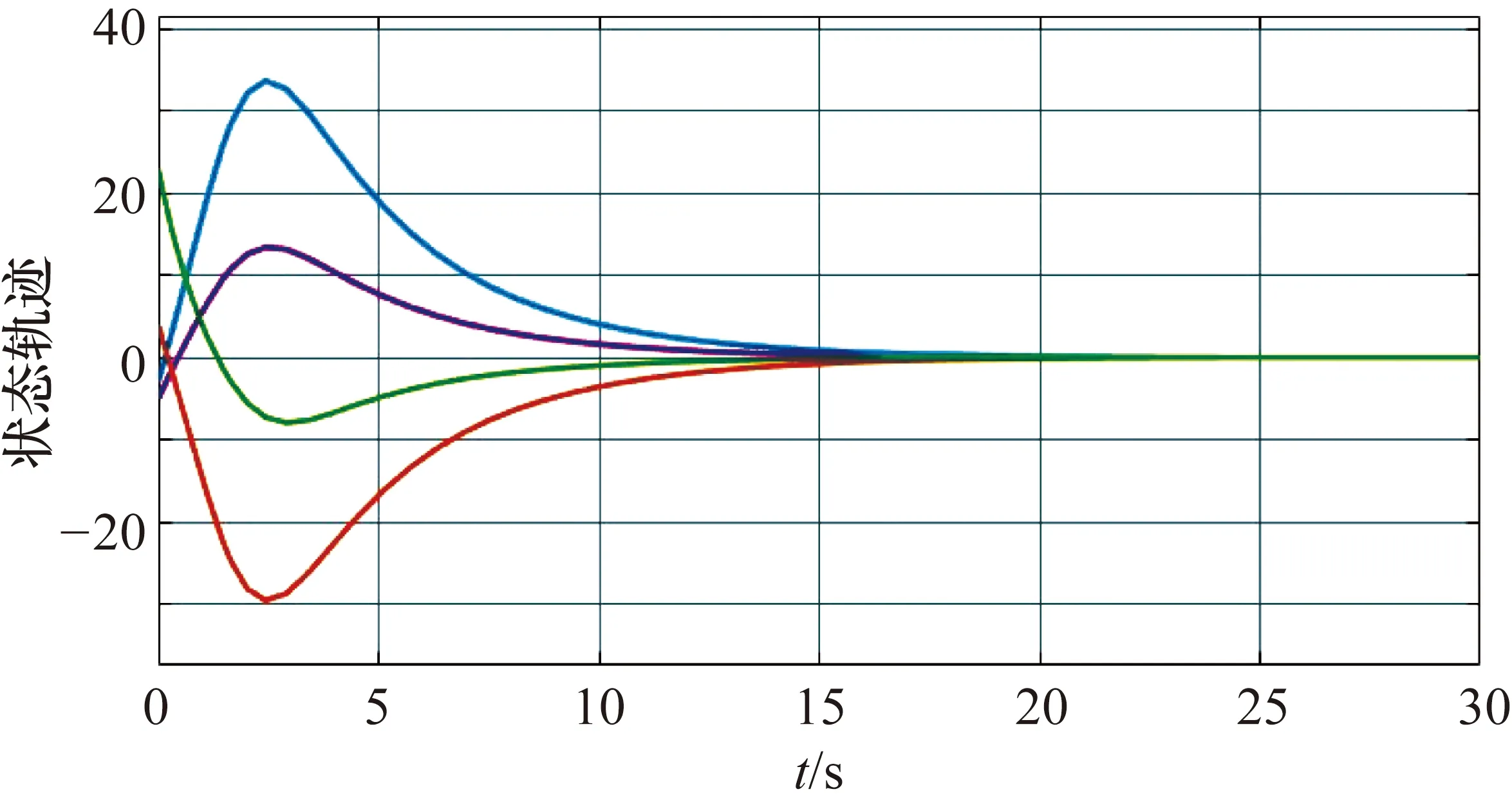
圖7 例1系統(tǒng)狀態(tài)軌跡仿真結(jié)果
例2:為了得到嚴格負虛控制器的條件,負虛被控對象的狀態(tài)空間實現(xiàn)由下面的矩陣給出:
用YALMIP[28]解線性矩陣不等式條件,得到:
考慮Φ1是一個死區(qū)非線性性:
則系統(tǒng)絕對穩(wěn)定,并在仿真結(jié)果圖8中得以驗證,對于任意一個非零的軌跡初值,隨著時間的增長,該系統(tǒng)的狀態(tài)軌跡都會收斂到0。
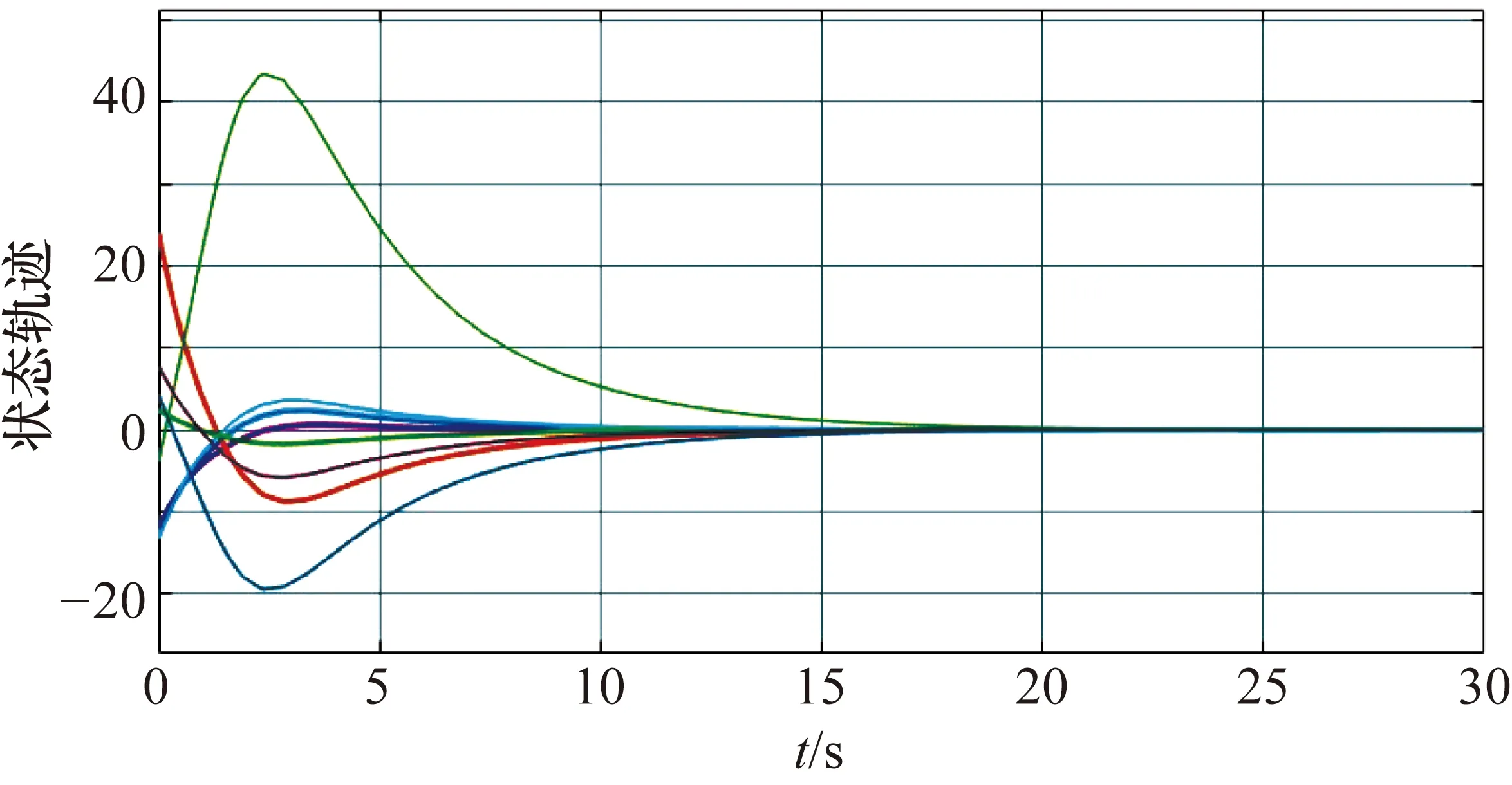
圖8 例2系統(tǒng)狀態(tài)軌跡仿真結(jié)果
4 結(jié)束語
針對帶有不確定性負虛系統(tǒng)互連的絕對穩(wěn)定性研究的不足,利用環(huán)變換等方法研究了負虛系統(tǒng)的絕對穩(wěn)定性。考慮的系統(tǒng)互連為負虛部分、嚴格負虛控制器及不確定性,得出了其絕對穩(wěn)定的條件和控制器的DC增益條件。并在控制器設(shè)計部分對主要理論的結(jié)果進行了拓展,增加了一定的保守性。因此,這樣的嚴格負虛控制器的設(shè)計值得進一步的探索。本文不僅解決了系統(tǒng)的絕對穩(wěn)定性分析,還得到了設(shè)計嚴格負虛控制器的DC增益條件,具有廣泛的應(yīng)用價值。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
