基于LABVIEW的道路圖像信息識別的研究*
2021-03-12 08:28:32張光葳
南方農機 2021年5期
關鍵詞:色彩
張光葳
(福建船政交通職業學院,福建 福州 350007)
0 引言
LABVIEW (Laboratory Virtual Instrument Engineering Workbench),是一種虛擬的電子設備工作平臺,可用于信號采集、信號處理、算法編程以及圖像處理等工作[1]。與傳統的虛擬工作平臺不同,LABVIEW采用的是一種基于圖像化,通過模塊組合及算法搭接的計算機編程語言。由于LABVIEW具有十分強大的圖像計算和處理能力,在工業控制和自動化生產上得到了十分廣泛的應用,因此本文使用LABVIEW對汽車行駛過程中道路的信息識別進行研究。
1 LABVIEW的視覺與運動模塊介紹
對于LABVIEW的圖像處理技術,需要使用到NI中的視覺與運動模塊,在處理過程中,可借用這套模塊內部自身的程序算法,對接外置攝像頭,實現圖像數據的采集和并結合程序自帶算法,對圖像進行色彩處理,實現數據的采集工作,減少程序設計時間和難度[2]。目前,主要視覺與運動的主要模塊包括圖像存儲、圖像加工、圖像檢測以及圖像信號采集等功能。
2 圖像預處理
對于外界實時收集的圖像情況,由于存在抖動、不穩定以及周邊環境干擾等影響,因此圖像所表達的信息往往不利于計算機的識別。所以需要對圖像進行預先處理,降低噪聲、增強幾何結構、突顯目標結構色彩[3]。另外,為了實現計算機對圖像中的目標圖形進行數字化讀取,還將對處理后的圖像進行數字解析,實現圖形的數字化,并對數字化后的數據重新進行構造和恢復,實現圖形的再現。
2.1 圖像采集
在進行圖形處理時,需對圖像進行網格采樣、間隔量化,并對模擬圖像進行一定的離散化處理后,才可被計算機進行識別處理。而使用攝像頭連接電腦后,可直接獲取圖像信息,不再需要額外其他電子設備的輔助,已經成為當下圖像信號數據采集的主要運用手段。因此,在實際操作中,只需要在LABVIEW程序中,建立圖像讀取空間、攝像頭通信通道、圖像數據顯示控件及可實現LABVIEW對圖像信號的實時采集。使用LABVIEW進行圖像采集的程序結構如圖1所示。
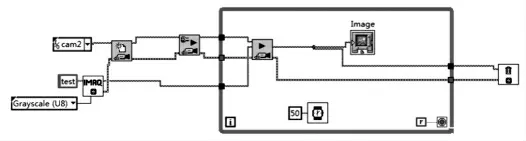
圖1 基于LABVIEW的圖像采集程序
使用圖1的程序,在夜晚道路上使用外置攝像頭,所得到圖像如圖2所示。

圖2 外置攝像頭所采集圖像
2.2 灰度處理
對于彩色圖片,由于像素點的變化范圍過大,多達一千六百多萬個變化范圍,因此數據量的處理過于龐大且毫無意義,需對彩色圖片進行灰度處理,使其變為偏向黑白的單色圖片,以減少圖片的數據容積,降低處理難度,減少計算量。
在以往的灰度處理中一般常用的灰度處理策略可分為三種:
2.2.1 加權算法
對于構建成色彩圖像的RGB模型,分別對R、G、B賦予不同的系數值,并將三者相加,且確保三者系數之和為1,一般而言,由于人眼對于綠色最為敏感,因此G的系數最高,而對藍色最不敏感,所以B的系數最低。
2.2.2 平均法
對于構建成色彩圖像的RGB模型,直接取R、G、B三個數值之和的平均值。
2.2.3 最大值法
以RGB模型中的最大數值分量作為圖像的灰度值。
對于三種方法而言,一般加權算法所呈現出的圖像更加細膩,有更強烈的層次感,因此在LABVIEW中使用加權算法對圖像進行灰度化。
在LABVIEW軟件中,可直接調用視覺助手模塊,進行圖像灰度調節,經過對于圖片環境及周末色彩的對比、對權重參數的不斷調整,最終得到的灰度化圖像如圖3所示。

圖3 灰度處理后的畫面
2.3 圖像二值化
在圖像灰度處理后,需進行二值化,其目的是將目標與背景圖像分離開,以方便計算機后續的識別工作。

圖4 圖像的二值化
二值化處理最常使用的是閾值法,其原理是利用目標圖像與背景圖像之間的閾值差異,選取某個閾值,進而將目標圖像和背景圖像區別開,進而得到二值化的圖像。但是,由于在不同環境下,各類圖像所呈現出的圖像畫面是各不相同,導致閾值存在不同,這也是二值化處理的難點所在。但是,由于正常城市道路的圖像色彩大致相同,并不會存在較大的色差,因此,基于這點,可選用LABVIEW中的自適應閾值處理模塊,確定道路的大致閾值,將道路與其他不相關背景分離出來即可,其圖像如圖4所示。
2.4 圖像分割
二值化后的圖像,由于背景中存在類似道路閾值的圖像,如車牌、路燈、反光帶等,因此會產生比較大的干擾,所以需要對這類圖像再進行分割進行處理。
對于圖像的分割處理,由于道路情況的變化復雜,無法使用定向區域分割的方法,而確定邊沿的方法則由于道路實際的不確定性,并無法事先確定道路邊沿,也無法使用。基于道路這種不可預判和不確定性,但目標區域又相對較大且確定性的情況,可使用區域生長法進行分割。其原理是從單點開始,可與周邊和其像素相近的點或區域進行結合,形成新的點或面,并不斷延續下去,最終直至無法擴增為止,基于這種策略,即可實現對道路圖像的分割處理,最終所得的圖像如圖5所示。

圖5 圖像分割
3 圖像邊界提取
在對圖像進行分割后,即可對圖像進行邊界提取,以確定道路的邊界情況。因此可調用LABVIEW軟件中的邊界提取模塊,通過提取后可得最終的道路識別情況,以5*5結構元素選取則結果如圖6的圈內線段所示。

圖6 邊界提取
4 總結
由LABVIEW軟件所處理得到的圖像可知,即使在夜晚復雜條件下,LABVIEW依然可以對道路圖像進行處理,并提取到道路信息。對所提取道路信號再進行后續處理后,可在今后應用于車輛行駛時的道路寬度判斷,以及邊界極限的確認,從而保證車輛的安全通過性,同時可以判斷在交會車條件下,兩車的通過性,因此在車輛安全行駛方面具有十分廣闊的研究前景和應用價值。
猜你喜歡
百科知識(2022年5期)2022-04-04 13:23:39
百科知識(2022年4期)2022-02-19 18:50:47
科普童話·學霸日記(2021年3期)2021-09-05 16:56:51
少兒美術(2021年1期)2021-04-26 14:22:08
活力(2019年17期)2019-11-26 00:42:34
小天使·一年級語數英綜合(2018年11期)2018-11-23 09:47:26
小資CHIC!ELEGANCE(2018年24期)2018-08-13 03:31:56
小學生學習指導(低年級)(2018年4期)2018-03-12 06:14:38
軍事文摘·科學少年(2017年1期)2017-04-26 18:30:13
環球人物(2016年9期)2016-04-20 03:03:30
