智能機械化放頂煤工作面在長平礦的應用實踐
2021-03-13 03:03:22元雪鵬
山東煤炭科技 2021年2期
元雪鵬
(山西晉城長平煤業有限責任公司,山西 晉城 048006)
1 工作面概況
5302 放頂煤工作面位于3#煤五盤區南翼,標高979~1170 m,工作面走向長度1 509.17 m(幫-停),傾斜長度295.00 m(幫-幫),煤層均厚5.64 m。該工作面在回采至1066 m 處布置有第二切眼,長96 m,第二停采線距第二切眼156 m。
2 5302 工作面巷道布置概況
5302 放頂煤工作面三條大巷均為矩形斷面,支護采用錨網鎖聯合支護。53021 巷用于主進風、運煤、供液、供水,53022 巷用于回風,53023 巷用于輔助進風、供電和輔助運輸,巷道特征見表1。
3 放頂煤采礦方法
回采工序:割煤→拉架→推前刮板輸送機→放頂煤→拉后刮板輸送機→清煤。
3.1 割煤
本工作面割煤方式采用雙向割煤,采高3.2 m,截深0.8 m。其中機頭、機尾進刀采用手動模式(機頭1#~18#架、機尾152#~170#架),中部采用記憶截割模式割煤(19#~151#架)。
3.1.1 機頭斜切進刀(1#~18#架)
機組割透機頭煤壁后,依次手動推移刮板輸送機,煤機后方刮板輸送機彎曲段不小于20 m;進刀完成后手動推移刮板輸送機至平直狀態,并將后溜機頭大架拉回;移第一次端頭架及轉載機,先降端頭2#架(采面側)向前移,端頭2#架移到位后升緊支架,閉鎖轉載機上閉鎖鍵,推移轉載機到位后降端頭1#架(煤柱側)移至與2#架平行位置進入割煤狀態。
3.1.2 中部割煤(19#~151#架)
中部采用智能化回采,工作面液壓支架隨采煤機進行自動跟機作業,同時啟用慣性導航系統對工作面找直,保證前刮板輸送機的直線度。采煤機采用智能截割模式進行智能化自動割煤,割煤工程中須及時觀察支架頂板情況、支架姿態、電液控控制器狀態以及頂板破碎或片幫嚴重情況,出現特殊情況須及時停止割煤或者進入手動模式,以免造成設備事故或災害事故。
3.1.3 機尾斜切進刀(152#~170#架)
機尾斜切進刀需注意機組割透機尾煤壁前,先將超前支架前移,保證超前支架不影響滾筒割煤。機組割透機尾煤壁后,依次手動推移刮板輸送機,煤機后方刮板輸送機彎曲段不小于20 m。
3.2 拉架
本工作面采用智能化電液控系統控制液壓支架的移架,可采用鄰架、成組、自動跟機、自動移超前架四種形式操作:(1)鄰架操作,液壓支架通過電液控手動模式進行單架移架;(2)成組操作,液壓支架通過電液控手動模式進行成組移架;(3)自動跟機操作,液壓支架通過自動跟機模式,實現自動移架程序;(4)移超前架操作,因長平煤田賦存條件影響,工作面頂板容易出現破碎,實際回采過程中需要超前拉架。采煤機割透機頭(尾)后,由支架工將工作面頂板破碎處的支架提前拉出;若出現個別支架不能及時拉出時本架報警啟動,由人工干預將超前架拉出。
3.3 推前刮板輸送機
19#~152#在自動跟機模式下,由慣性導航LASC 系統協同電液控系統進行前部刮板輸送機自動找直,電液控系統控制液壓支架滯后機組后滾筒10 架自動順序跟機推刮板輸送機,保證刮板輸送機直線度。1#~18#、152#~170#進行手動模式推刮板輸送機,推移步距為0.8 m。推出刮板輸送機后,需控制刮板輸送機溜槽水平方向彎曲度≤3°,垂直方向≤1°,彎曲段長度不小于17.5 m。
在當前普通本科院校進行改革或轉型的形勢下,旅游管理作為一門實踐應用型較強的專業,其實踐教學體系一直處于較為混亂的狀態;各學校由于受制于設施設備、師資等原因,沒有形成完善的實踐教學體系。從涉及實踐教學的三個環節(專業必修課、專業選修課、集中實踐環節)入手,提出了課程實習、課堂模擬、校內實訓、頂崗實習、研究性實踐、創新創業實踐等實踐教學形式,構建起實踐教學體系,并通過實驗室建設、教師隊伍、資金支持和企業合作進行支持。
3.4 放頂煤
以手動放煤為主、智能化放煤為輔的放煤方式。
(1)智能化放煤按時間頻次滯后采煤機后滾筒20 架自動順序放煤,單架放煤,每架放煤時間15 s,第1 個放煤工始終跟隨采煤機,隨時觀察尾梁、插板狀態及自動放煤效果(見矸即停),第2、3 個放煤工隨時進行第二輪補充放煤。
(2)手動放煤采用電液控手動模式,用支架遙控器在架間進行放煤操作,并隨時觀察尾梁、插板狀態及放煤效果,手動放煤采用雙輪順序分段放煤方式。放煤過程中,見矸石須立即停止放煤。
(3)放頂煤操作要求:放頂煤工序與割煤工序平行作業,移架滯后上滾筒3~5 架,放煤滯后移架距離為5~10 個架;放煤工先將支架升緊,初撐力達標之后再放煤;放煤過程中,應相互配合,避免放煤量過大;大塊煤卡阻影響放煤時,可升降尾梁或使用插板將大塊煤破碎;當發現頂板大塊矸石時,及時將后尾梁擺起插板伸出,關閉放煤口停止放煤,防止矸石混入煤中。
3.5 拉后刮板輸送機
采用手動模式成組拉后刮板輸送機,當工作面支架放完煤后,滯后10 架拉后刮板輸送機。該工序需注意順序拉后刮板輸送機并控制步距為0.8 m,移完排頭架須及時拉后刮板輸送機機頭和機尾。
3.6 清煤
清煤需充分利用班前、班后時間;清煤時按下本架電液控制器閉鎖,面向機尾清煤;清煤完畢,需及時拔出閉鎖鍵。清煤質量標準:清煤后2 m2范圍內浮煤厚度不大于30 mm。

表1 巷道技術特征表
4 智能化回采工藝
工作面集控中心一鍵啟動工作面乳化液泵站、皮帶輸送機、破碎機、轉載機、刮板輸送機;采煤機采用記憶截割模式,支架通過SAC 系統實現自動移架,采煤機LASC 系統協同SAC 系統實現刮板機的自動找直;地面分控中心、工作面集控中心通過SAM 系統對綜采工作面采煤機、液壓支架、運輸設備、供液設備、供電設備進行實時監控,及時做出操控調整。
5302 放頂煤工作面智能化裝備是結合長平井下現有的綜放采煤工藝,配置SAM 自動化控制系統1 套、SAC 電液控自動化控制系統1 套、MG500/1170-AWD1 型采煤機。5302 放頂煤工作面智能化裝備可以實現以下六大功能。
采用LSAC 技術,通過在采煤機上安裝基于高精度專用慣性陀螺儀的采煤機位置測量系統,實現工作面直線度自動調整。
(2)工作面智能化記憶截割
記憶截割模型通過記憶分析示范刀的工作參數、割煤軌跡、割煤機運行數據,并進行智能化運算,形成自由曲線記憶截割方式。按照實際學習的采煤工藝實現全工作面自動截割運行。同時,在自動截割過程中可以根據工作面情況進行在線修正,實現截割模型與工作面的實際情況一致。
(3)工作面智能化自動跟機
通過分析工作面煤層產狀、采煤機運行參數、圍巖壓力、液壓支架工況等信息,將工作面的連續生產狀態進行自動劃分并具備自動分析決策功能,實現液壓支架跟機動作的智能控制。
(4)工作面智能化遠程集控
實現在地面分控中心和井下順槽集控中心對綜采工作面采煤機、液壓支架、運輸設備、供液設備進行運行工況監測、遠程控制和自動化控制。“一鍵啟停”功能能夠實現設備的有序啟動和停止,數據傳輸高速精確,當生產過程出現偏離或設備工況數據異常時,可及時調整設備運行狀態,進行人工遠程干預。
(5)工作面智能化視頻監控
視頻監控功能實時顯示操作設備的現場狀況,為全工作面所有操作人員提供語音預警信息,對綜采工作面主要設備及圍巖環境實施無盲區視頻監控,實現工作面安全高效管理。
(6)工作面智能化人員識別
主動防護、本質安全,實現快速準確的人員識別以及安全保護功能。
5 主要經濟技術指標
采用智能化采煤方法,5302 工作面的主要經濟技術指標見表2。
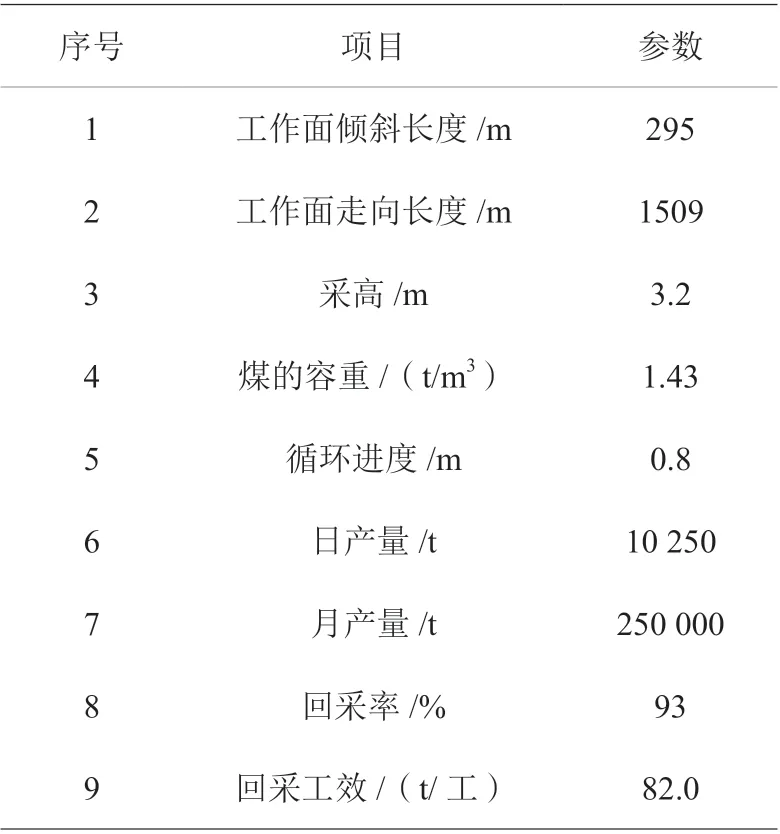
表2 主要技術經濟指標表
6 結論
長平礦5302 放頂煤工作面配備了具有記憶能力、學習能力、感知能力和決策能力的綜采裝備,采煤機采用記憶截割模式,支架通過SAC 系統實現自動移架,采煤機LASC 系統協同SAC 系統實現刮板機的自動找直。智能化放頂煤采礦技術在長平礦應用以來,該采礦方法的優勢逐步體現,日產原煤達10 250 t,回采率達到93%,回采工效82.0 t/工,實現減人增產提質的效果。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
保健醫苑(2022年5期)2022-06-10 07:46:12
防爆電機(2022年1期)2022-02-16 01:14:06
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
印刷工業(2020年4期)2020-10-27 02:45:52
模具制造(2019年3期)2019-06-06 02:10:54
中國交通信息化(2017年4期)2017-06-06 07:21:52
能源(2015年8期)2015-05-26 09:15:56
航天器工程(2014年5期)2014-03-11 16:35:55
河南科技(2014年18期)2014-02-27 14:14:58