火電機組深度調峰工況輔機安全控制技術研究
2021-03-13 09:13:14虞國平張新勝屠海彪李文杰
浙江電力 2021年2期
關鍵詞:控制策略
虞國平,張新勝,屠海彪,李文杰,丁 寧
(1.浙江浙能電力股份有限公司,杭州 310007;2.國網浙江省電力有限公司電力科學研究院,杭州 310014;3.杭州意能電力技術有限公司,杭州 310014;4.浙江浙能臺州第二發電有限責任公司,浙江 臺州 317108)
0 引言
隨著國家層面的能源結構轉型,特高壓主干網架和新能源的規模化并網,受端電網機組調峰和新能源的消納都需要火力發電機組向下擴展調峰空間,參與深度調峰(以下簡稱“深調”)運行。近年來,全國火力發電機組參與深調的時長與頻次越來越高,逐漸成為機組運行常態。以浙江為例,按照省發改委對統調發電機組深調技術改造要求,2018 年底完成了全省燃煤機組40%Pe~50%Pe 的深調擴容。各發電集團對非停機組的統計數據表明,機組深調期間發生的非停、設備故障、控制惡化工況占比日趨上升,深調機組的可靠運行不容忽視。
在深調機組負荷調節深度、經濟性、低負荷穩燃安全性方面,研究單位取得了較多技術成果。李偉[1]等人在機組深調工況下通過對磨煤機冷風管道容量增大技術改造以及采用風機在線性能監控系統實時監測風機運行工作點,對鍋爐主輔機運行安全性進行了分析;張廣才[2]等人以超臨界600 MW 機組深調實踐為例,通過風、粉均衡調整進行低負荷穩燃,提高了機組深調工況下燃燒的安全性;沈利[3]等人對超臨界大容量機組參與深調時,從機組的安全性、經濟性和環保性等方面論證了穩燃、脫硝、脫硫和除塵的影響;李玲[5]等人通過機組深調負荷變化主參數變化模型,提出適應強的變參數協調優化控制邏輯,取得了良好的協調控制品質。上述文獻大多關注低負荷穩燃負荷的調峰能力,但是針對深調機組可靠運行與控制技術的研究尚不多見,對深調機組可靠運行的重要環節——主要輔機跳閘功能更是缺少深度研究。
本文圍繞深調機組輔機跳閘后的可靠運行技術開展研究,針對汽泵、一次風機等重要輔機跳閘與高負荷RB(輔機故障減負荷)工況控制策略進行對比分析,指出運行與控制的風險點,并以某1 050 MW 超超臨界機組為對象,選取40%Pe~50%Pe 試驗區間,完成了制粉系統、一次風機以及汽泵的跳閘試驗,驗證了控制策略的必要性與正確性,提升了深調機組對輔機跳閘的應對能力,提高了深調的可靠運行能力。
1 深調機組輔機跳閘控制策略研究
1.1 深調機組輔機跳閘與RB 功能區別分析
深調機組輔機跳閘控制雖然與RB 功能有相同之處,部分策略可以通用,但在控制策略的設計目標、機組運行控制的風險點、控制策略細節上均有較大差別,部分邏輯不可以通用,否則會導致輔機跳閘后的機組運行狀態惡化,甚至造成機組非停。
(1)控制目標與RB 不同
DL/T 1213—2013《火力發電機組輔機故障減負荷技術規程》給出RB 的定義:“輔機故障降負荷,當機組發生部分主要輔機跳閘故障,使機組最大理論出力低于當前實際負荷,機組協調控制系統將機組負荷快速降低到所有輔機實際所能達到的相應出力,并能控制機組參數在允許范圍內保持機組繼續運行”。RB 的主要目標是使機組負荷、風、煤、水等與機組輔機最大帶載能力快速相匹配。而深調機組一般負荷小于50%Pe,單臺輔機帶載能力均不低于50%Pe,不會觸發RB 功能,控制目標是未跳閘輔機與機組協同控制下的快速穩定,抑制對側輔機可能給系統帶來劇烈擾動,并非機組負荷的變化,甚至CCS(單元機組協調控制系統)或者AGC(自動發電控制)都無需撤出,這一點上與RB 功能的側重點不同。
(2)風險點與RB 不同
RB 功能的主要風險點在于機組快速降負荷和對側輔機直接最大出力后帶來的不協調以及RB 后第一時間各設備錯誤。而深調機組輔機跳閘后風險點首先在于給水流量、汽泵再循環閥、總風量、制粉系統一次風量等涉及到機組、設備主保護的參數均處于保護底線,很容易造成這些過程參數直接低于保護定值引起機組跳閘、設備跳閘;其次,機組在深調過程中接近斷油穩燃底線負荷,當制粉系統、一次風機、空預器等輔機跳閘時很容易造成鍋爐燃燒惡化,引發燃燒不穩和鍋爐偏燒,使機組處于危險狀態;第三,忽略了機組全工況下的自動控制策略與參數整定,輔機故障后誘發相關自動調節系統發散;第四,大多機組沿襲了以往DCS(分散控制系統)邏輯設計,未對深調機組的輔機跳閘后的運行與控制策略進行周全的設計和試驗,在輔機出現故障時,運行人員也未進行充分的應急措施考慮。
綜上,不完善或僅考慮采用RB 功能取代深調機組的輔機跳閘后的運行與控制策略,會導致機組在參與深調過程中可靠性降低,運行人員缺乏相應的應急處理能力,造成機組隱患。深調機組應根據實際負荷和機組邊界條件確定輔機跳閘后控制策略和調節參數,設計對應負荷下的汽泵轉速限制、風機翻轉限值等,根據不同的輔機跳閘對機組的運行方式、汽溫、燃料、風量、爐膛負壓、給水流量以及主蒸汽壓力進行自動控制。本文針對汽泵、一次風機、制粉系統提出了深調主要輔機跳閘后的控制要點,設計了完善的控制策略,解決了機組在深側輔機跳閘后的自動控制難點,無需運行人員手動干預,彌補了傳統RB策略在低負荷段中的控制缺陷,其控制策略如圖1 所示。
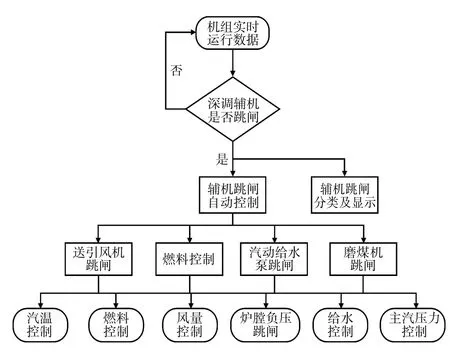
圖1 主輔機跳閘自動控制系統控制策略結構框圖
1.2 通用控制策略
機組在深調工況下對主要模擬量的控制品質要求更加嚴格,需要對單輔機自動控制進行整定,例如深調工況單送風機、單引風機、單一次風機以及單汽動給水泵的自動控制品質,區分兩臺與單臺輔機自動控制下被控量的控制參數,可針對單臺和兩臺輔機及不同負荷段設置對應的控制參數。以風機控制為例,通用部分控制策略如圖2 所示。
1.3 制粉系統跳閘控制策略
制粉系統故障是輔機里最常見的問題,深調機組一般運行3~4 臺磨組,為了確保低負荷穩燃、鍋爐不發生偏燒及負荷靈活性控制,大部分機組更傾向于選擇4 臺運行。其主要風險點在于3 臺制粉系統運行、跳閘1 臺時,為確保穩燃應盡可能保障剩余制粉系統最大帶載,點油槍助燃,適當降低給水流量,防止機組由干態轉換至濕態,維持爐膛負壓控制參數穩定;4 臺制粉系統跳閘1 臺時,無需點油槍助燃,該試驗也是一次風機跳閘的預備性試驗,主要防止鍋爐出現偏燒超溫,維持爐膛負壓控制穩定。控制策略如圖3 所示。
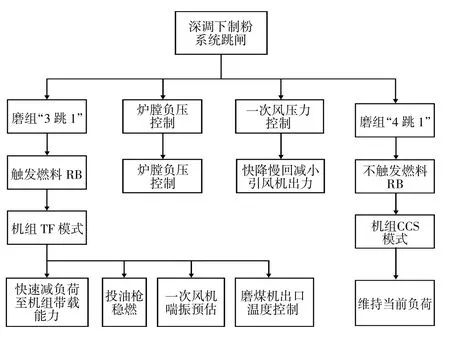
圖3 深調機組制粉系統跳閘自動控制框圖
策略實現制粉系統跳閘后,首先判據磨組“3跳1”還是“4 跳1”,若是“4 跳1”,燃料RB 不觸發,機組保持當前運行模式,通過前饋快減慢回回路設計控制引風機出力,維持爐膛負壓穩定;若是“3 跳1”,機組觸發低負荷燃料RB,機組切TF(汽輪機跟蹤方式)方式運行,投油槍穩燃,鍋爐指令至2 臺制粉系統最大帶載能力。值得關注的是,除了對負壓完善多負荷區間的自適應參數,還應設計制粉系統跳閘至引風機和一次風機前饋值的多負荷段模型,低負荷上述風機動葉均處于良好線性區間,跳閘前饋相較高負荷應適當減小,以降低風機前饋動作對爐膛負壓的擾動,大大提高機組低負荷制粉系統跳閘后機組運行的可靠性。
1.4 一次風機跳閘控制策略
一次風機在各種風機跳閘中難度最大,具有代表性,主要風險點在于其燃燒工況惡劣,尤其在低負荷影響鍋爐穩燃,單側一次風機需要迅速維持一次風壓穩定,爐膛負壓與磨組一次風量控制難度大。當深調機組保留4 臺制粉系統運行時,單側一次風機難以為4 臺磨組提供足夠的一次風量,易導致磨組因一次風量低連續跳閘,只可保留3 臺制粉系統運行。需要特別指出,為保證爐膛負壓的調節品質,一次風機動葉翻轉不可與RB 工況一樣直接翻轉至上限,應以對應負荷下單臺一次風機運行的動葉開度略有裕度為最佳(部分一次/送/引風機帶載能力較大,50%Pe 以下時往往遠未達到單臺風機的出力上限,不加區分直接翻轉至動葉上限,會導致單側風機電流突增,爐膛負壓控制惡化)。
其控制策略如圖4 所示。一次風機跳閘后,RB 不觸發,CCS 不撤出,為了保證機組運行的穩定性,一方面投油槍穩燃(與一次風機RB 投油槍回路相同),另一方面只保留3 臺制粉系統。為了保證爐膛負壓擾動后能快速穩定,增加對爐膛負壓前饋控制,根據跳磨數量快減慢回控制引風機出力,對側一次風機動葉翻轉至目標限制位置,為了防止動葉的PID 產生積分飽和,PID 出口應在動葉達到限制位置后進行切換,防止一次風機出力在最大出力的附近晃動。
1.5 汽動給水泵跳閘控制策略
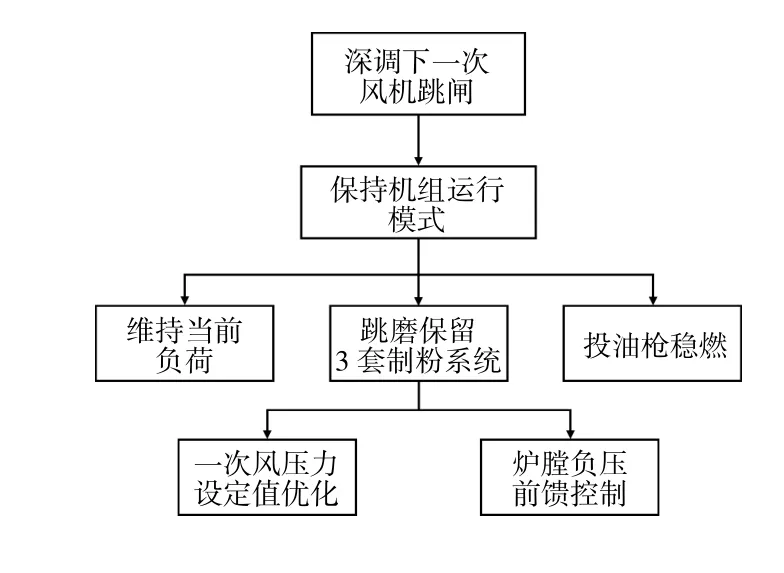
圖4 深調機組一次風機跳閘自動控制框圖
無論對于汽包爐還是直流爐,深調機組汽泵的停運對機組影響都是最大的。本文以直流爐為研究對象,單側汽泵停運后,其控制的風險點首先是給水流量的迅速下降,很容易就達到MFT(總燃料跳閘)的動作值,調峰機組負荷越低(總流量越低),危險性就越大,隨著機組負荷達到一定下限時,對側汽泵雖有一定的調節能力,但來不及調節;其次,很多機組MEH(數字式電液控制系統)側的汽泵轉速指令速率下限保留了調試的初始值600 r/min,在高負荷運行時600 r/min 的設置足夠汽泵調節,但低負荷極端工況時600 r/min的限制速率會嚴重影響汽泵的調節速率。在對各種類型汽泵和小汽機廠家調研后發現,1 200 r/min以下的速率限制均在設備安全速率范圍內;第三,不少機組為使汽泵調節平緩,給水流量測量值增加了5~10 s 不等的慣性模塊,但對于深調機組單側汽泵跳閘后的分秒必爭的調節是致命的,應根據需求重新評估低負荷給水流量測量的慣性時間。
本文針對汽泵控制風險點提出了一種基于專家知識庫的深調下汽動給水泵跳閘過程控制模型,如圖5 所示。深調機組單臺汽泵跳閘后,基于DCS 策略建立的知識庫控制模型可根據機組負荷、給水流量、MEH 升速率限制、給泵進口流量、給泵出口壓力、給泵實際轉速來提前預估給水流量最低值和給水流量下降持續時間,便于運行操作員掌握機組單臺汽泵跳閘后的過程參數。
知識庫中最主要的參數是MEH 升速率設定值,小機轉速最大變化速率限制可以達到1 200 r/min,單側汽泵跳閘后,對側汽泵指令根據給水控制PID 調節迅速提升,但小機轉速指令達到目標值所需時間取決于MEH 升速率限制,決定了給水流量降至的最低值以及下降持續時間。根據試驗機組歷史數據,汽泵原MEH 小機升速率設定為600 r/min,汽泵跳閘后,對側汽泵轉速指令每增加150 r/min,小機進口流量增加約210 t/h,跳閘后,給水流量下降持續時間約15 s,15 s 內對側小機進口流量約增加210 t/h。
綜上,按照小機1 200 r/min 速率上限的要求,適當提高MEH 中小機升速率,提升對側汽泵調節速率,減少給水流量下降時間,降低因給水流量過低導致MFT 風險,450 MW 試驗前將機組MEH 中小機升速率由600 r/min 按照知識庫模型自動設置為900 r/min。
2 深調機組輔機跳閘策略應用與試驗分析
在完成深調機組輔機跳閘策略的設計與完善后,在某1 050 MW 超超臨界發電機40%Pe~50%Pe 區間開展了制粉系統跳閘、一次風機跳閘、汽泵跳閘試驗,驗證了控制策略的必要性與正確性,提升了深調機組對輔機跳閘的應對能力,提高了深調運行的可靠性,也為深調區間控制策略完善和運行人員應急響應提供了依據。
2.1 制粉系統跳閘試驗
機組CCS 方式運行,D,E,B 磨煤機運行,機組負荷450 MW,主蒸汽壓力12.16 MPa,給水流量1 302 t/h,一次風機壓力8.4 kPa,總燃料量176 t/h,爐膛負壓-115 Pa,運行人員手動停運E磨煤機,燃料RB 觸發,機組切至TF 模式,機組最大帶載能力400 MW,燃料RB 觸發后,最低煤量降至129 t/h,一次風壓力升至9.8 kPa,爐膛負壓由-115 Pa 降至最低-438 Pa,給水流量由1 302 t/h 降至1 043 t/h,主蒸汽壓力最大偏差0.45 MPa,最低負荷320 MW,如圖6 所示。
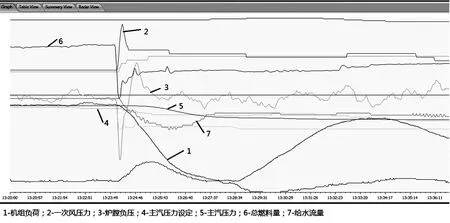
圖6 磨組“3 跳1”試驗
由圖6 可知:E 磨煤機停運后,主蒸汽壓力下降較快,此時壓力設定值高于實際值,汽機控制主汽壓力,高調門關小,滑壓線速率過小,高調門關幅較大,機組負荷最低降至320 MW,因此體現出高負荷段的壓力慣性和滑壓速率與低負荷階段無法匹配,低負荷燃料RB,需對滑壓速率重新整定。
2.2 一次風機跳閘試驗
機組負荷450 MW,CCS 方式運行,D,E,B,A 磨煤機運行,一次風機壓力8.4 kPa,總燃料量178.4 t/h,爐膛負壓-148 Pa,運行人員手動停運一次風機B,一次風機B 跳閘,A 磨煤機聯鎖跳閘,D 層大油槍投運,一次風機A 的動葉由50%升至90%,電流由99 A 升至187 A,機組負荷由450 MW 降至404 MW,爐膛負壓最低降至-597 Pa,一次風壓力由8.4 kPa 降至7.1 kPa,過熱度由8.6 ℃升至11.15 ℃,鍋爐燃燒穩定,機組運行狀態平穩,一次風機A 未出現超流現象,爐膛負壓-150 Pa 最低降至-600 Pa,負壓波動正常,主汽溫度變化正常,如圖7 所示。
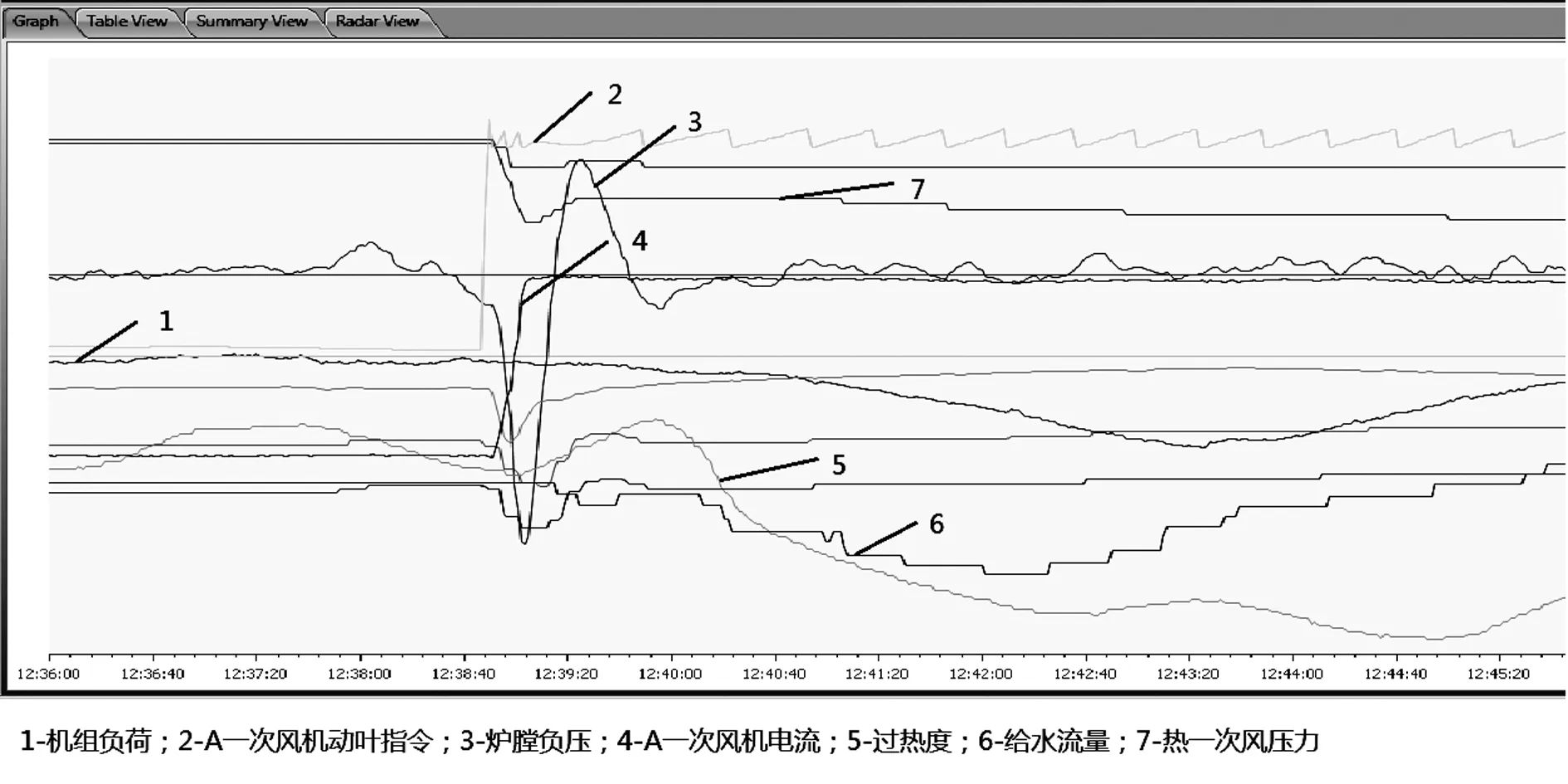
圖7 一次風機跳閘試驗
由圖7 可知:一次風機B 跳閘后,D,E,B磨煤機運行,一次風機壓力穩定在7.1 kPa 左右,此時壓力設定值為8 kPa,導致一次風機A 動葉在最大出力附近波動,此工況下一次風機母管壓力設定值7 kPa 左右較為合適,還需進一步優化低負荷一次風機壓力設定。
2.3 汽動給水泵跳閘試驗
機組CCS 方式運行,D,E,B 磨煤機運行,機組負荷437 MW,給水流量1 246 t/h,汽泵A轉速3 288 r/min,汽泵B 轉速3 279 r/min,A 給泵進口流量600 t/h,B 給泵進口流量624 t/h,運行人員手動停運汽泵B,機組保留CCS 模式,給水流量最低降至849 t/h,汽泵A 轉速指令升至3 836 r/min,機組負荷降至412 MW,過熱度由0.8 ℃升至20.48 ℃,主蒸汽溫度由589 ℃升至592 ℃,機組狀態穩定,如圖8 所示。
圖8 汽動給水泵跳閘試驗
由圖8 可知:汽泵B 跳閘后,僅10 s 給水流量達到最低值849 t/h,A 側汽泵DCS 轉速指令(MEH 限制前)由3 288 r/min 升至3 836 r/min,A小機實際轉速升至3 723 r/min,未跳閘汽泵實際轉速變化受限于MEH 側小機升速速率限制。試驗前小機升速率設置為900 r/min,汽泵跳閘后,未跳閘的汽泵轉速指令每增加100 r/min,小機進口流量增加約140 t,給水流量下降時間約10 s,小機A 實際流量增加210 t/h。按照原有600 r/min的小機速率,給水流量下降時間預計為15 s,最低流量預計會降至700 t/h 左右,對于深調機組不同實際負荷的汽泵跳閘,提升MEH 中的小機限速率能夠有效提升未跳閘小機的響應速率,避免給水流量低于MFT 定值,基于知識庫的動態小機速率模型能夠有效匹配汽泵跳閘調節。
3 結語
在各發電集團的非停事故案例中,深調機組的運行可靠性問題體現在多個方面,測量的可靠性、執行機構的線性度和模擬量控制品質的惡化都不容忽視。本文針對機組主要輔機在深調運行跳閘后的自動控制技術進行研究,對汽泵、一次風機等輔機在深調跳閘后的運行風險點和控制難點進行分析,給出了機組深調的輔機跳閘與RB工況的區別,設計和優化了適用于參與深調的火力發電機組各輔機跳閘后的可靠性控制策略,能夠降低深調機組輔機跳閘后的運行風險,也為深調區間控制策略完善和運行人員應急響應提供了依據。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36