堆場平行岸線的自動化碼頭水平運輸建模與仿真
2021-03-15 08:06:12李天昊
起重運輸機械 2021年19期
關鍵詞:作業
李天昊 周 強 田 宇,2
1武漢理工大學物流工程學院 武漢 430063 2上海國際港務(集團)股份有限公司 上海 200080
0 引言
隨著無人駕駛技術的發展和集裝箱碼頭自動化程度的不斷提高,堆場平行岸線布置的集裝箱碼頭開始采用無人駕駛集卡進行水平運輸自動化改造。但陸域集疏運作業仍舊使用人工駕駛集卡,無人-人工駕駛集卡在碼頭內部混合通行,勢必會對集裝箱碼頭水平運輸自動化產生影響。如何對無人駕駛集卡和人工駕駛集卡進行精準管控,確保碼頭水平運輸作業的安全與高效,是集裝箱碼頭水平運輸自動化改造過程中研究的焦點。
集裝箱碼頭水平運輸系統是一個典型的復雜系統,系統內影響因素眾多,計算機建模仿真提供了一種簡單有效的研究方法[1,2]。雖然國內外專家對集裝箱碼頭自動化改造方面有一定的研究成果[3,4],但對采用無人駕駛集卡的集裝箱碼頭水平運輸自動化改造研究還處于探索階段。因此,依據集裝箱碼頭水平運輸自動化改造方案,探索元胞自動機(cellular automata,以下簡稱CA)與Agent相結合的建模方法,構建基于CA-Agent的集裝箱碼頭水平運輸系統模型,從系統角度研究無人-人工駕駛集卡通行優先級和裝卸道容量兩類集卡管控策略對碼頭生產作業的影響。
1 集裝箱碼頭水平運輸自動化改造
1.1 集裝箱碼頭平面布置及裝卸工藝
集裝箱碼頭堆場平行岸線的平面布置是碼頭最為常見的布置形式,其裝卸工藝主要采用堆場起重機(以下簡稱場橋)+集卡+岸邊集裝箱起重機(以下簡稱岸橋)的形式。該種集裝箱碼頭平面布置和裝卸工藝下,集卡可以沿箱區側面的裝卸道行駛至目標箱位處,由場橋完成堆場與集卡的集裝箱裝卸交接。集裝箱在堆場的水平移動主要依靠集卡,場橋的大車行走機構為非工作機構。裝卸船內集卡和集疏運外集卡不能分開行駛,不可避免存在2類集卡混行交叉的沖突情況,給碼頭的水平運輸自動化帶來了復雜的安全與效率問題。堆場平行岸線布置的集裝箱碼頭平面布置及交通流向如圖1所示。
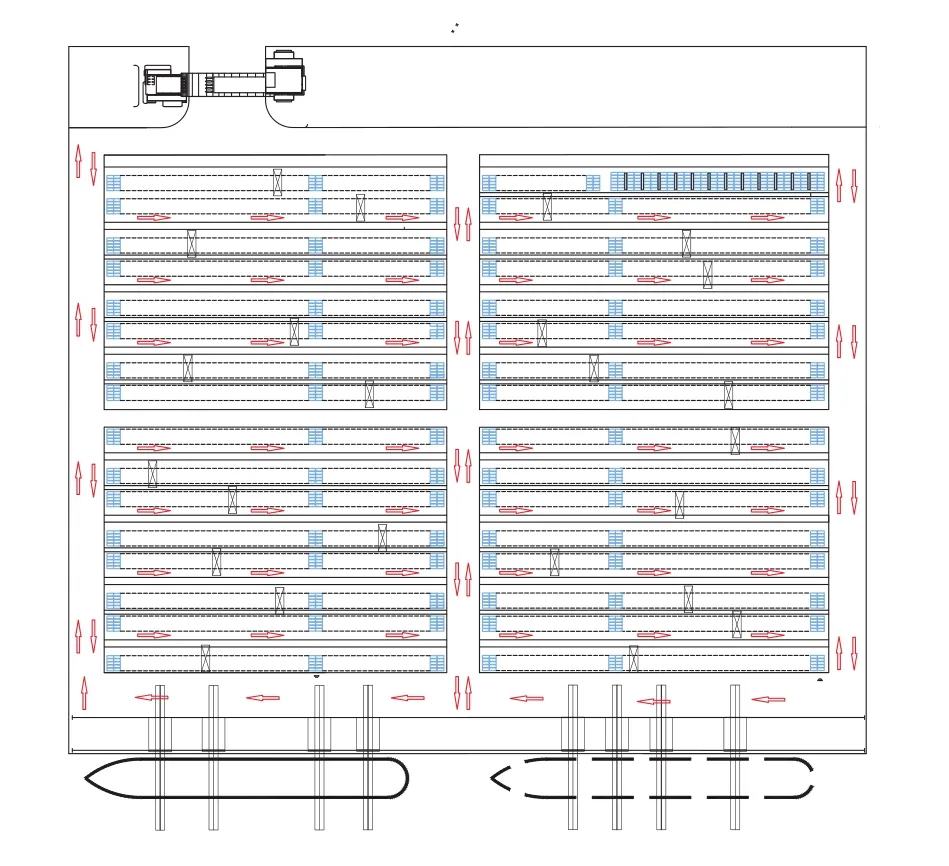
圖1 集裝箱碼頭平面布置和交通流向示意圖
1.2 水平運輸自動化改造
集裝箱碼頭的水平運輸自動化改造主要包括內集卡無人化、集卡導引自動化以及交通管控的精準化3個方面。
首先,集裝箱碼頭通過高精度雷達、車載攝像頭、5G與V2X通訊以及自動駕駛等技術對傳統集卡進行自動化改造,實現港區內集卡的無人駕駛。無人駕駛系統充分與電氣控制系統(ECS)系統交互,利用碼頭設備間的信息協同,實現內集卡的遠程控制和港區環境下的車路協同。
其次,碼頭生產管理系統(TOS)與車輛管理系統(VMS)進行結合,通過無線通訊技術,將裝卸任務信息發布給相應集卡,通過集卡實時定位結合排隊信息,控制集卡運行路線與順序,指揮引導集卡自動停在正確位置,實現集卡引導自動化。
最后,碼頭設置智能閘桿和交通信號燈等管控設備,控制內、外集卡的通行優先級和裝卸道容量,實現多場區通行次序管制。通過內、外集卡的精確定位,結合車輛管理系統控制無人駕駛集卡的跟馳距離與停車間距,實現內、外集卡在系統控制下的精確運行,確保無人駕駛集卡和人工駕駛集卡能夠混合運行,實現交通管控的精準化。
2 集裝箱碼頭水平運輸系統建模
2.1 CA與Agent建模方法
元胞自動機[4]是由Von Neuman所提出的一種在離散時空框架下根據有限狀態進行演化的動力學系統。元胞自動機由元胞、元胞空間、鄰居、元胞狀態和規則變換函數5部分構成,其相互關系如圖2所示。CA方法具有建模簡單、仿真效率高的特點,但也存在對道路、車輛、控制規則過度簡化而產生的精度不足的問題。

圖2 元胞自動機結構示意圖
Agent理論[5]是由Minsky所提出的一類具有相互溝通能力、環境適應能力以及通過學習改變自身行為和運行規則的個體。Agent的基本結構如圖3所示,一般具有感知、執行、決策、通信、知識庫等模塊。Agent模型能夠較好地反映無人駕駛集卡和人工駕駛集卡的車輛控制、調度等過程,但也存在建模過程復雜度高、考慮因素眾多、仿真效率低下的問題。
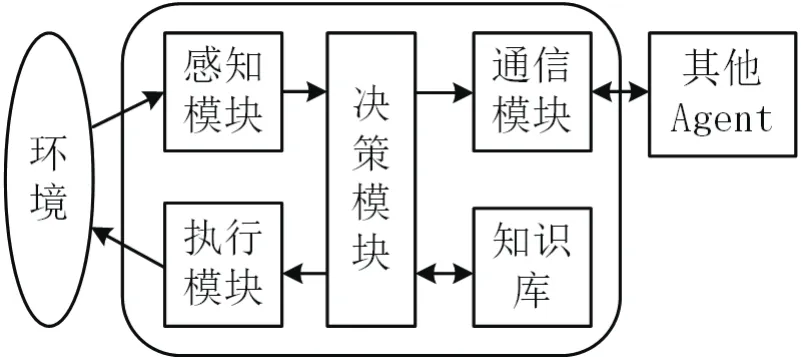
圖3 Agent基本結構
CA和Agent理論都可以對集裝箱碼頭等復雜系統進行抽象描述,在理論描述和建模應用方面存在相關性。兩者都具有可遷移、可擴展的開放性;具有自下而上的建模方式;運用演化規則推動系統運行;采用并行計算方式將復雜問題離散化分解;都具有空間特性,使得兩者具有結合的可能性。因此,通過對CA方法進行元胞定義、狀態以及演化規則的擴展,實現與Agent方法的相互融合,在保證水平運輸自動化集裝箱碼頭仿真精度的情況下,提高碼頭水平運輸作業的仿真效率。
2.2 基于CA-Agent的模型框架
基于CA-Agent的集裝箱碼頭水平運輸模型框架由系統控制層、道路元胞空間以及裝卸設備元胞空間3部分組成,如圖4所示。

圖4 模型整體框架圖
系統控制層包括集裝箱碼頭道路交通控制信號和生產作業控制信息,交通控制信號控制裝卸道容量,集卡通行優先級、跟馳距離、停車間距等集卡行駛狀態;生產作業控制信息負責集卡Agent、場橋元胞、岸橋元胞的任務分配和設備調度。道路元胞空間是集裝箱碼頭路網結構的映射,根據碼頭路網結構和功能的不同,劃分為車輛行駛速度與規則各異的路網元胞。集卡Agent模擬實際集卡的功能與狀態,在路網元胞上行駛并進行水平運輸作業,與感知范圍內的元胞和集卡Agent進行信息交互。裝卸設備元胞空間主要包含場橋和岸橋元胞,兩類元胞在判斷集卡Agent到達指定裝卸位置后,會根據集疏運、裝卸類型任務類型,模擬實際集裝箱裝卸的過程。
模型的3個部分之間都設置有標準的數據接口,即各部分之間可以通過相同的數據結構和輸入輸出方式進行信息交換。
2.3 路網及裝卸設備元胞模型構建
2.3.1 元胞劃分及狀態設置
集裝箱碼頭路網和裝卸設備根據位置和功能劃分為如圖5所示的7類元胞,其中白色為主干道元胞C1,灰色的代表交叉口元胞C2,粉色的為裝卸道元胞C3,橙色的為超車道元胞C4,淺綠色的前沿道路為C5;場橋元胞用Cc,岸橋元胞用Ca表示。元胞具有位置信息和狀態信息,元胞的屬性設計如下:

圖5 路網及裝卸設備元胞局部示意圖
元胞的位置信息用三維數組(Cn,Cx,Cy)表示,其中Cn代表元胞的類型,Cx、Cy代表元胞的橫、縱坐標位置,集卡利用所在道路元胞的坐標值可以計算車輛的間隔距離。
元胞占據狀態用O表示,O={1,0} 。其中0表示當前元胞沒有被集卡或裝卸設備占據為空閑等待狀態;1表示元胞被占據。
集卡的行駛方向用狀態D表示,D={1,2,3,4}。1表示集卡向下行駛,2、3、4分別表示集卡向右、向上和向左移動。
集卡的速度用狀態V表示,V={0,1,2,…,Vmax}。集卡Agent行駛速度按照一個仿真步長經過的元胞數量來計算。
裝卸狀態用L表示,L={0,1}。其中0代表當前道路上沒有集卡進行裝卸作業或裝卸設備未進行裝卸作業;1代表在車輛進行裝卸作業或裝卸設備正在進行裝卸作業。
2.3.2 裝卸設備元胞的演化規則
每個箱區的場橋元胞內只有1臺場橋進行裝卸作業,當有集卡正在進行裝卸作業時,裝卸道上的其他集卡必須排隊等待。場橋在有裝卸作業任務時,會根據自身移動速度,經過一定的仿真步長到達指定元胞位置進行作業。場橋元胞的裝卸作業示意圖和流程圖如圖6、圖7所示。
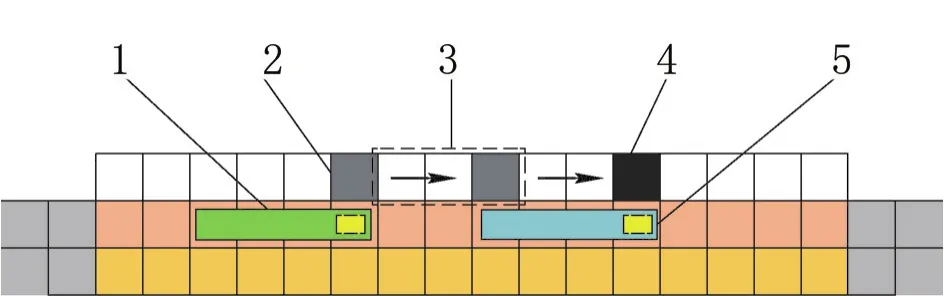
圖6 場橋元胞裝卸作業示意圖
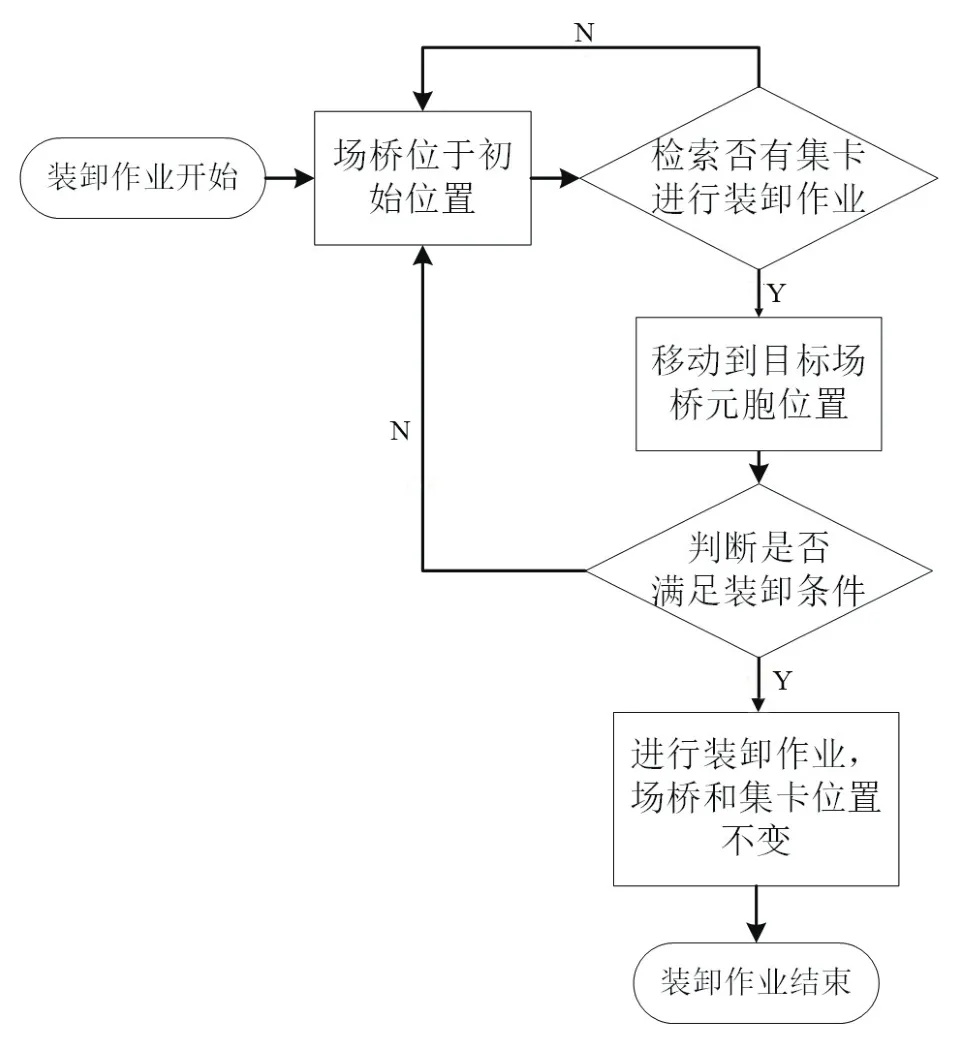
圖7 場橋元胞作業流程圖
岸橋元胞內可以有多臺岸橋同時作業,每臺岸橋負責一條泊位前沿道路。岸橋移動到目標元胞位置且集卡到達泊位前沿的指定裝卸點,岸橋進行裝卸船作業,如果岸橋已經在目標元胞位置則不需要移動。岸橋元胞裝卸作業示意圖和流程圖如圖8和圖9所示。

圖8 岸橋元胞裝卸作業示意圖
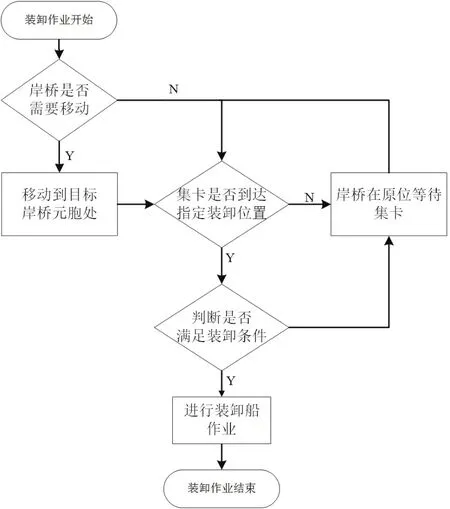
圖9 岸橋元胞作業流程圖
2.4 集卡Agent構建
集卡Agent和無人駕駛集卡一樣,能接受來自車輛管理系統的管控信息,根據集卡所感知的環境信息,結合車輛自身狀態和控制規則進行駕駛行為的自我判斷。集卡Agent的結構如圖10所示,主要由傳感器、狀態庫、規則庫、決策模塊、執行模塊5個部分構成。
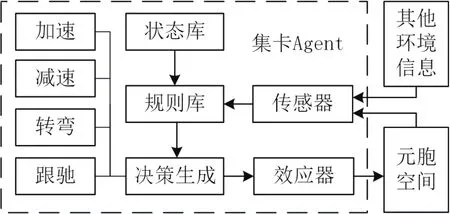
圖10 集卡Agent結構
其中傳感器用于采集元胞空間和其他集卡Agent的狀態信息,同時接受交通控制與生產作業控制等環境信息;狀態庫則是保存了集卡Agent當前的作業任務、速度、位置、集裝箱裝卸點等狀態信息;規則庫內包含了無人駕駛集卡在各類道路段上行駛的通行規則;決策模塊根據當前狀態庫、規則庫以及傳感器的信息進行綜合決策,決定下一時刻車輛的行駛狀態和位置并將數據傳輸給效應器;最后由效應器具體執行集卡Agent位置及狀態信息的變化。
集卡Agent的行駛與交通規則如下:
1)加速規則 加速過程表示的是集卡在集裝箱碼頭內期望以最大的速度行駛的特性,集卡Agent在主干道和超車道可以加速行駛,規則表示為
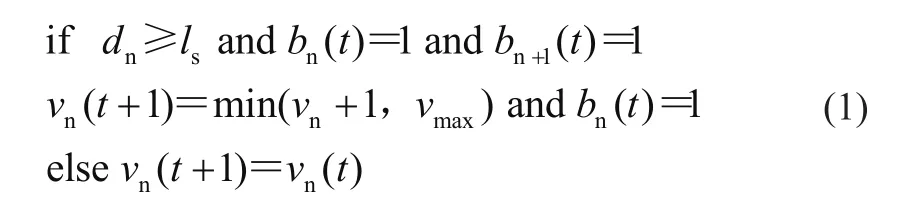
式中:ls為集卡的安全距離,dn為集卡n和集卡n+1之間的元胞數,l為車輛長度,bn(t)為當前時間集卡的加、減以及勻速的情況,其中bn(t)=1為加速狀態;vn為集卡n當前時刻速度,vmax為當前道路集卡可以行駛的最大速度。
2)減速規則 無人駕駛集卡在集裝箱碼頭主干道、交叉口、裝卸道等道路部分需要根據前車狀況進行減速或停止避免碰撞,或集裝箱裝卸點位置前減速保證準確停靠,主要有防撞減速、交叉口轉彎減速和裝卸減速3種。
集卡為避免前車減速或停止而產生的碰撞情況,需要根據情況減速或停止,規則表示為

當集卡到達交叉口時,且交叉口有集卡正在進行轉彎,集卡需要進行減速慢行或停止,規則表示為

Sn為集卡n與交叉口之間的空元胞數,vc1max為主干道中集卡最大行駛速度,vc2max為交叉口最大行駛速度。
當集卡進入裝卸道后,如果前方為裝卸點,需要降速慢行保證停止在裝卸點位置的精確性,規則表示為

式中:kn為集卡到目標裝卸點的元胞數量。
3)交叉口通行原則 當交叉口元胞內沒有轉彎集卡,直行的集卡可以最大速度通過交叉口。當無人駕駛集卡和人工駕駛集卡同時轉彎進入堆場時,根據車輛優先級判斷和等待時間綜合判斷轉彎的先后順序。當需要轉彎的集卡和直行集卡通過相同交叉口的時候,計算通過交叉口的時間min(t1,t2),用時短的集卡優先通行,規則表示為
式中:t1為集卡直行通過交叉口的時間,Cx邊界為交叉口的橫向邊界,xn為直行集卡位置,t2為轉彎集卡通過交叉口所用的時間,Cy邊界為交叉口的縱向邊界,yn為直行集卡所在車道序號。
3 實際案例仿真分析
采用國內某水平運輸自動化改造的集裝箱碼頭作為仿真案例,碼頭共布置2個泊位,堆場共分為4個場區32個箱區,采用岸橋+無人駕駛集卡+RTG的裝卸工藝,其中岸橋8臺,RTG24臺。碼頭裝卸船作業采用無人駕駛集卡,港外進行集疏運作業為人工駕駛集卡,分析無人駕駛集卡通行優先級和裝卸道容量2類管控條件對無人駕駛集卡作業循環時間的影響,仿真界面如圖11所示。
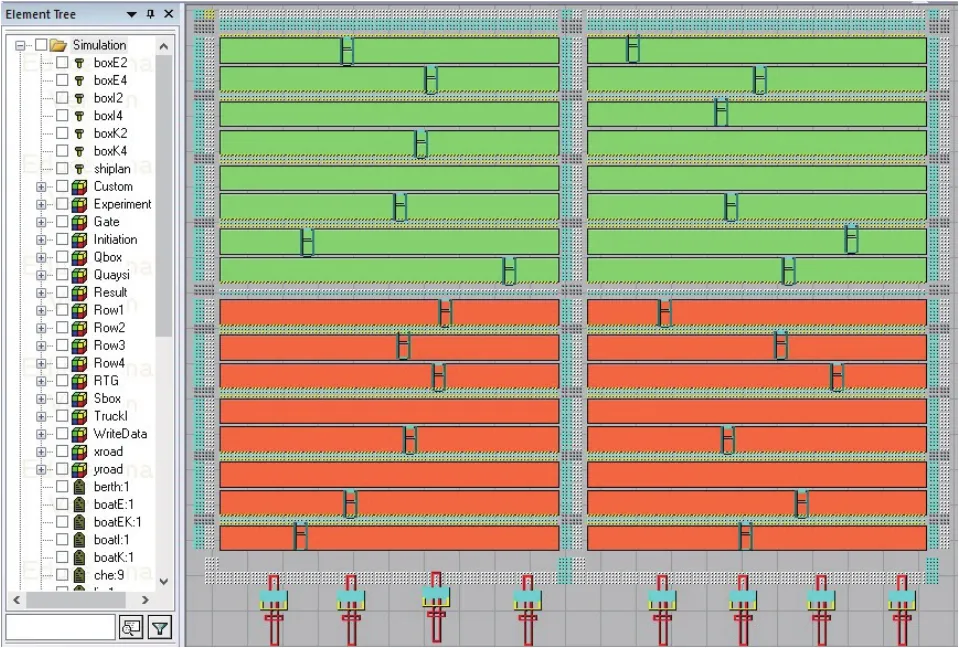
圖11 仿真界面圖
3.1 仿真參數設置
仿真實驗參數依據碼頭設計資料以及《海港集裝箱碼頭設計規范》進行設置,具體數值如表1~表3所示。仿真工況選取碼頭作業高峰期,所有裝卸設備都參與裝卸作業。仿真模型中1個仿真步長時間t= 2 s。
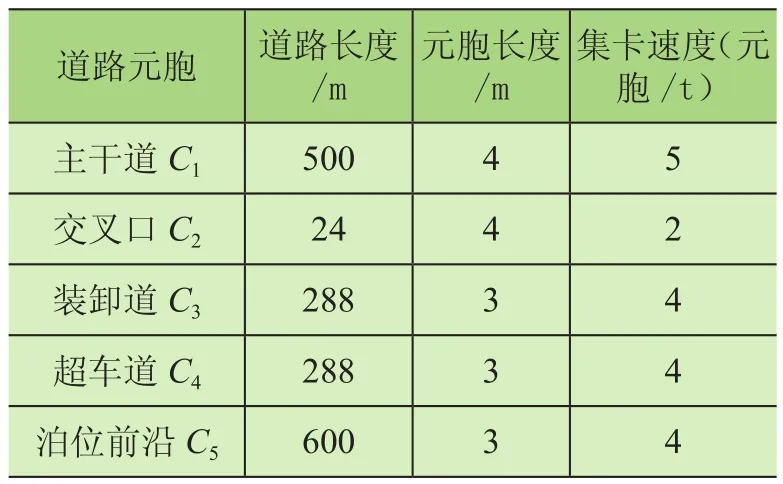
表1 道路元胞參數表
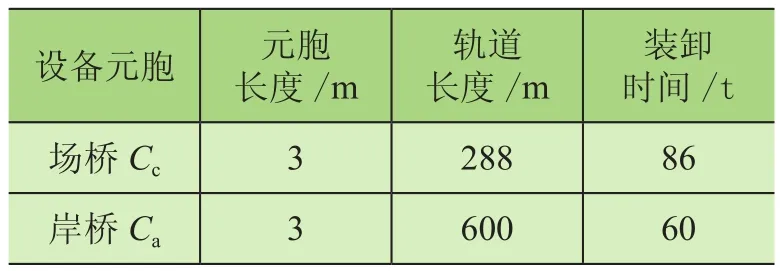
表2 裝卸設備元胞參數表

表3 水平運輸管控條件與參數
3.2 仿真實驗結果與分析
仿真實驗選取無人駕駛集卡通行優先級和裝卸道容量作為變量條件,記錄不同管控方案下無人駕駛集卡作業循環時間(無人駕駛集卡完成裝船或卸船任務的平均時間)。無人駕駛集卡通行優先級有高、中、低3種,裝卸道容量取1~9,每種方案運行10次,得到的實驗結果如表4、圖12所示。
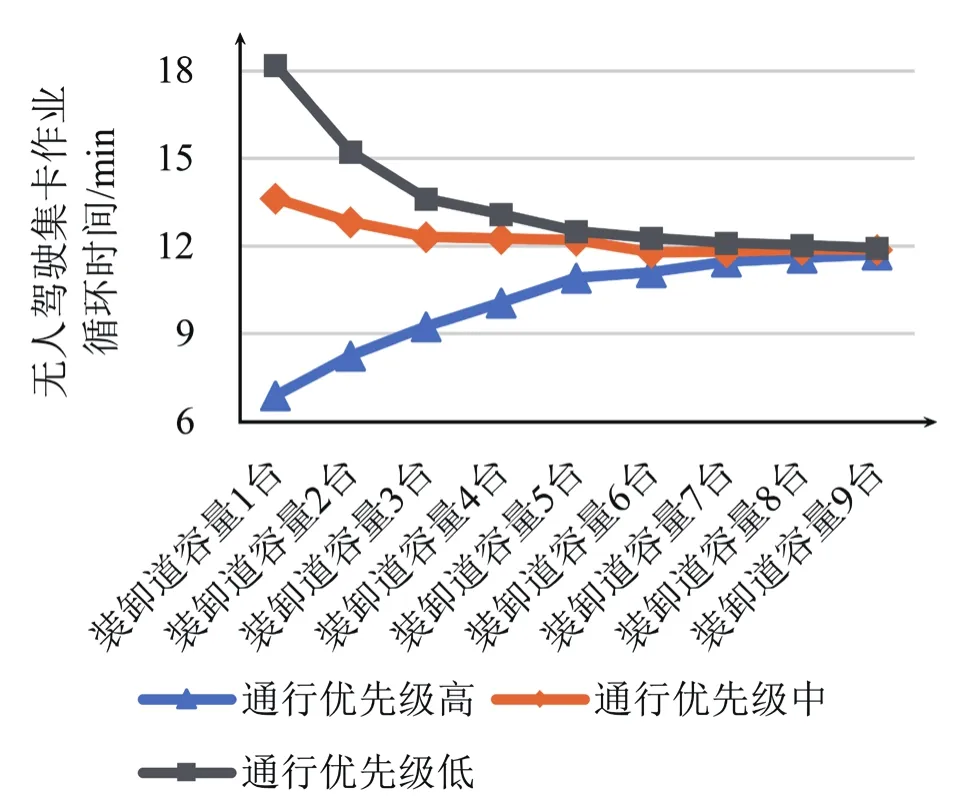
圖12 無人駕駛集卡作業循環時間圖
結合表4的數據,從圖8中可以發現裝卸道容量較少時,提高無人駕駛集卡優先級可以有效降低無人駕駛集卡的作業循環時間,說明無人-人工駕駛集卡集中在主干道中,提高無人駕駛集卡通行優先級,可減少無人駕駛集卡在主干道的堵塞和排隊時間,從而降低作業循環時間。
隨著裝卸道容量的增加,裝卸道上緩存了原先應該在主干道進行排隊的集卡,主干道交通逐漸暢通,當裝卸道容量達到8臺及以上時,3種通行優先級條件下的作業循環時間幾乎一致,說明無人駕駛集卡在主干道排隊的情況基本消失,作業循環時間不受通行優先級影響。
此外,當無人駕駛集卡通行優先級為高,且裝卸道容量為1時,無人駕駛集卡的作業循環時間是管控方案中最小的僅有6.89 min,說明限制人工駕駛集卡進入堆場作業可以獲得最大的無人駕駛集卡作業效率,符合碼頭在裝卸船作業高峰期禁止外集卡進入堆場的措施。因此,通過建模仿真方法,可以分析研究水平運輸管控條件對無人駕駛集卡作業循環時間的影響,為集裝箱碼頭水平運輸自動化改造和精細管控提供參考。
4 結論
在堆場平行岸線的集裝箱碼頭水平運輸自動化改造分析基礎上,將元胞自動機與Agent建模方法進行結合,構建了基于CA-Agent的集裝箱碼頭水平運輸系統仿真模型。根據碼頭實際作業參數和工況進行仿真分析,得到裝卸道容量和集卡通行優先級與無人駕駛集卡作業循環時間的關系曲線,為集裝箱碼頭水平運輸的自動化改造提供科學的管控策略。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08