國外水下無人集群應用及關鍵技術研究*
2021-03-16 09:21:44張曉霜
艦船電子工程 2021年2期
陶 偉 張曉霜
(1.海軍研究院 北京 100073)(2.江蘇自動化研究所 連云港 222061)
1 引言
水下環境復雜多變,極大限制了水下作戰裝備的發展運用。水下無人航行器(Unmanned Underwater Vehicle,UUV)因其廣闊的應用前景和多樣化的軍事用途已成為世界各國海軍爭相發展的重要裝備。UUV可執行水下探測、隱蔽偵察、搜索定位、通信中繼、反潛戰、獵掃雷、水下設施布放等多種任務,將在未來海戰場發揮不可替代的作用[1]。區別于早期重點研究單個UUV個體經由有人平臺的運載、發射、控制及使用等問題,隨著人工智能、大數據以及新型通信、導航、指揮控制技術的飛速發展,聚焦多個UUV的水下無人集群(Underwater Unmanned Swarm,UUS)逐漸被各界重視,并作為一種新的裝備運用形態快速發展起來[2]。
無人系統是影響未來戰爭制勝機理的顛覆性技術,而集群化是無人系統的重要發展方向。無人集群(Unmanned Swarm)的概念最早應用于無人機,隨著人工智能、無線自組網及導航技術的發展,多無人機可以聚合起來構成能夠一起完成給定任務的共同體[3]。水下無人集群是指由多個具有一定自主決策能力、彼此之間存在指揮控制和通信關系,且共同承擔給定使命任務的水下無人平臺所構成的群組。隨著水下無人平臺自主性和對外互操作能力的提升,水下無人集群正呈現出效率高、成本低、可重構、可執行多任務等特點。美軍最早開展水下無人集群的研制和應用,并于2011年11月頒布了《海軍科學技術戰略規劃》,首次構想建立包含無人系統在內的混合部隊。2014年,美智庫發布《戰場機器人:即將到來的蜂群》報告,系統提出了無人系統蜂群戰術,并先后開展了多個水下無人集群應用項目的研究及試驗驗證。在未來水下作戰中,應用水下無人系統集群可增大水下偵察搜索范圍,提高反應速度與協同效果,對于實現裝備技術跨越式發展有重要意義[4~5]。本文通過對外軍典型水下無人集群應用的分析,重點討論包含協同通信、協同導航定位、協同探測及協同指揮控制[6]等在內的集群關鍵技術,并對國外水下無人集群的發展趨勢進行了分析。
2 外軍典型水下無人集群系統發展現狀
2.1 分布式敏捷反潛系統
美國防高級研究計劃署(DARPA)研發的“分布式敏捷反潛系統”,旨在研究驗證利用水下無人系統進行反潛作戰的效能[6]。該項目計劃利用數十個水下無人潛航器潛伏在水下6000m的海底并組成顛覆性反潛網絡,用于監視180000km2水域內敵方水下有人作戰平臺的活動,可實現水下大范圍跟蹤探測。
2.2 自主水下航行器協同感知控制(CO3AUVs)項目
CO3AUVs項目是一個歐盟委員會資助的多國合作項目[7],隸屬于歐盟第七科技框架計劃(FP7)中“信息和通信技術”的“認知”專題。其目標是研發和實現適用于多AUV協調和協同控制的高級認知系統。重點突破水下機器人協同感知與建模技術、受約束的水下協同通信技術、多AUV協同控制策略、編隊避碰及協同路徑跟蹤技術、測海及地磁導航技術等。
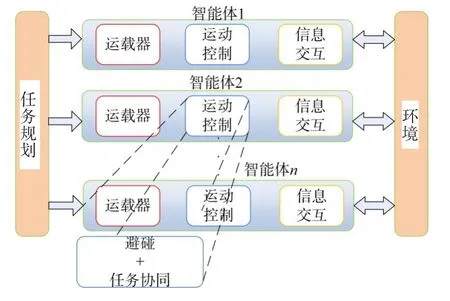
圖1 CO3AUVs任務協同功能框圖
2.3 瀕海持續水下監控網絡(PLUSNet)
持續瀕海水下監控網絡是一個異構水下無人平臺集群研究項目[8],如圖2所示。該項目以導彈核潛艇為母體平臺,由多個UUV、水下滑翔機等異構水下無人平臺為活動節點組成大規模的有線與無線集成網絡。其中,水下活動節點攜帶半自主傳感器,水下由水聲向其他節點傳輸數據,水面通過無線電與艦船和岸基節點通信,并能夠自主執行多種任務,做出基本決策,可有效監視的水下區域高達數萬平方公里,是當今世界最先進的水下監視網絡計劃之一。
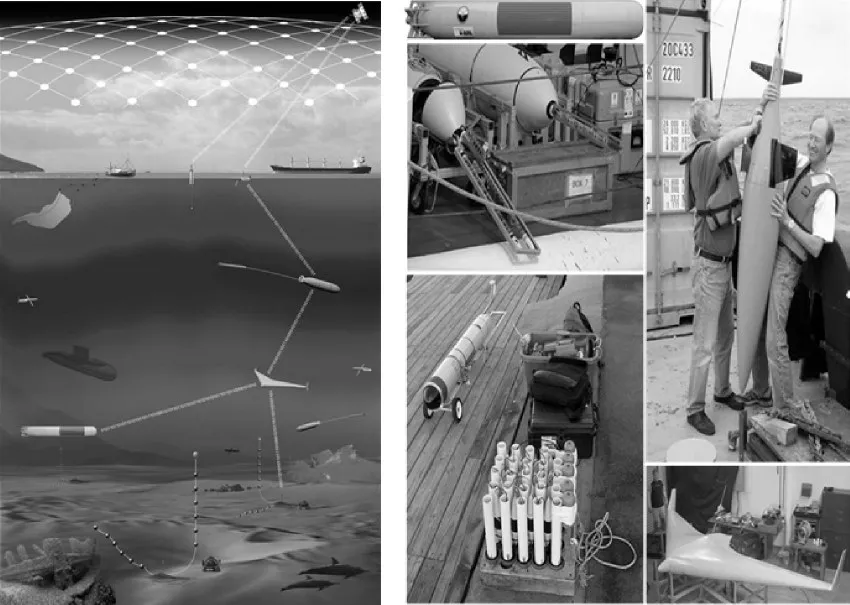
圖2 PLUSNet系統及節點示意圖
2.4 自主海洋取樣網絡(AOSN)
20世紀90年代,美國開發的“自主海洋取樣網絡”進行了初步應用試驗。2003年,美國繼續開展“自主海洋取樣網絡II”的研究工作。該網絡由若干網絡節點組合形成,每個網絡節點由一個系留的水面浮標和若干艘自主式無人潛航器組成。該網絡系統具備全向性覆蓋、自適應采樣、靈活控制、能量管控及關鍵部件失效的魯棒性等。
3 水下無人集群典型應用
3.1 情報、監視、偵察任務(Intelligence,Surveillance,and Reconnaissance,ISR)
水下無人集群ISR任務主要包含如下作業:1)持久穩定地戰術情報收集,包括水聲信號、電信號、測量信息、圖像以及海洋、氣象學信息等;2)化學、生物、核能、放射性物質以及爆炸物搜索與定位;3)近岸及港口監視;4)后方部署監視聲納或聲納陣;5)地圖繪制及目標探測與定位。
水下無人平臺種類繁多,執行ISR任務前編隊應明確需求擇優選取個體。ISR任務一般分為典型模式及持久穩定模式,這兩種不同的ISR模式對UUV需求不同,每次任務根據需求進行編隊構建,具體如表1所示[9]。
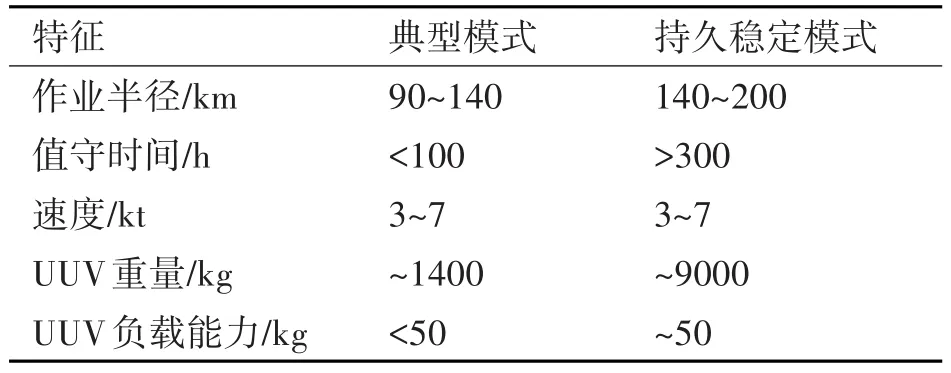
表1 兩種ISR模式對UUV的特征需求
執行ISR任務時,無人集群以一定隊形在作業區域航行,在預定時間內執行相應的情報收集任務,且可根據作業需求進行重新配置,在收集情報的同時規避風險。
3.2 反水雷(Mine Countermeasures,MCM)
反水雷目的為發現并銷毀水雷,為我方水面、水下有人平臺保駕護航。由于一套成功的反水雷系統需要在一小時內清除至少約18km2才算達成目標[9],僅依靠單個UUV不可能完成,因此需水下無人集群編隊配合作業來實現。在執行反水雷任務時,需要迅速設立水下無人集群安全操作區域以及航行路線,進而對任務區域進行排查。水下無人平臺反水雷作業區域一般為300km2~3000km2,最大作業時間約7~10天[9],可覆蓋深水雷區乃至海軍陸戰隊近岸作業區域。MCM任務一般包括:1)偵察(水雷偵察、分類、識別、定位);2)清除水雷(水雷中和或引爆);3)機械及電磁掃測;4)保護(誘騙、干擾)。
在進行反水雷戰時,首先布放無人集群至任務區域,無人集群利用自身傳感器獲取的各類信息,對任務區域快速搜索路線進行決策;同時利用我方沿岸軍艦作為網絡中繼點實現岸上、水面情報收集,綜合水下、水面、岸上信息。
3.3 反潛戰(Anti-Submarine Warfare,ASW)
ASW任務主要目的為監視敵方潛艇動態,使我方水面、水下編隊對其實現有效規避或打擊。水下無人平臺在反潛戰中主要達到以下目的:1)監視敵方潛艇進出港;2)清除航母編隊及遠征部隊作業區域,遠離敵方潛艇威脅;3)清除航母編隊及遠征部隊航路區域,遠離敵方潛艇威脅。
水下無人集群在敵方軍港執行潛艇進出港任務時,通過水面船舶或潛艇在安全海域布放。無人集群在敵潛艇出港之前自主航行至任務區域,通過多個小UUV協同,建立起一個可維護數日的巡邏柵欄執行反潛任務。
監視敵方潛艇動態還可通過部署如圖3所示集群實現。采用集群探測可獲取敵方潛艇信息,包括位置、路線以及速度等,這些信息可通過UUV集群中的通信中繼個體實現近乎實時的回傳。
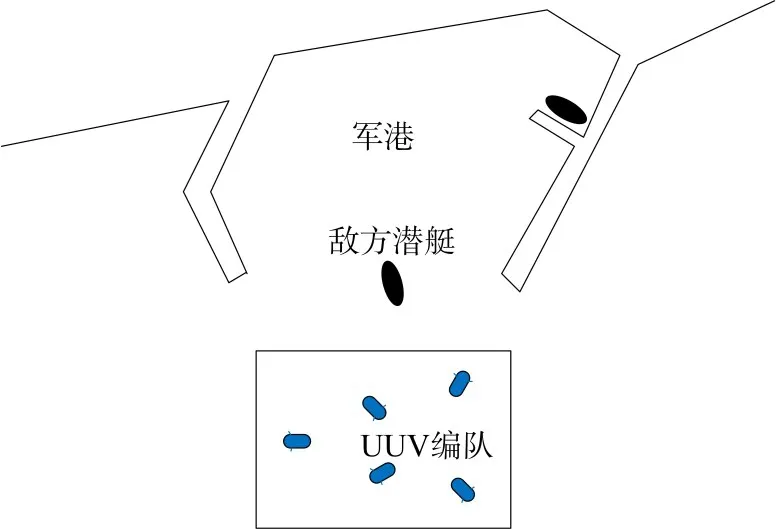
圖3 UUV集群監視敵方潛艇出港示意圖
保護作業區域以及航路遠離敵潛艇威脅是水下無人集群執行反潛作業的另一項重要任務。水下無人集群探測到敵方潛艇后對其進行分類,隨后報告目標位置。根據實際需求,還可對目標進行跟蹤,進而不斷更新目標位置等信息。
4 水下無人集群關鍵技術
4.1 協同通信技術
協同通信技術解決水下無人集群內部(UUV之間)、集群與外部(UUV與水下固定通信節點之間以及UUV與水下有人作戰平臺之間)的多業務信息傳輸與共享問題。目前UUV主要依靠無線電通信、水聲通信及光通信三種手段[10]。無線電通信通信帶寬寬、速率高、業務量大,主要用于水面、對空及空間通信,但在海水中衰減嚴重,水下平臺適用的甚低頻、超低頻等通信手段速率低,且以廣播通信模式為主,不能滿足水下無人集群雙向通信、頻繁交互的需求;UUV配備的衛星通信天線適用于UUV浮出水面對外快速通信。
水聲通信以聲波為載體,聲信號在海水中衰減小,是理想的水中通信手段。經過多年發展,外軍在UUV水聲通信方面取得了較大進展,并成功地在多型UUV上應用。考慮水聲環境復雜性對通信效果的影響,要充分發揮水聲通信在水下無人集群中的作用,后續還需突破環境適應性、基于孔徑和功率控制技術的通信隱蔽性設計、帶寬受限下的高速編碼及指令集設計等。
藍綠光波段在海水中穿透能力可達數百米,具有較好的方向性、較高的工作頻率以及較寬的通信頻帶,且不受電磁輻射和核輻射影響,暴露概率極低,可極大提高水下平臺的隱蔽性及安全性。20世紀70年代美國就開始論證藍綠激光對潛通信,80年代以來進行了多次試驗并取得了良好效果,實驗室條件下傳輸速率高達1Gbps[11],可以避免上行光路受太陽光等背景噪聲干擾等問題,較機載藍綠激光對潛更適合水下集群。但考慮到激光通信系統的復雜性,后續還應不斷優化體積重量及加裝適應性。
4.2 協同導航技術
協同導航技術用以確定水下無人集群中各節點間相對位置關系。水下無人集群協同導航主要通過對等式協同導航和層級式協同導航兩種技術途徑實現。對等式協同導航要求集群內各個機動無人節點都裝備有高精度的導航定位設備,且在導航功能方面具有相同的配置和能力;使用中各節點利用自身設備進行導航定位,并在集群內互通共享自身位置信息。層級式協同導航只需在集群中設置少數無人機動節點并裝備高精度導航定位設備,而其他節點則可裝備相對低精度的導航設備;使用中前者在進行自定位并獲取群內節點相互位置關系后,可通過在群內廣播相關位置信息,促使后者提高自身定位精度。
水下無人集群協同導航技術發展重點為以下兩個方面:一是水中信道傳播延遲對協同定位計算的影響[12]。聲速較光速低,水聲信道傳播存在較大延遲,在集群內各節點存在相對運動的狀態下,對相關節點的測距和位置信息接收需重點考慮聲信號的傳播延遲,以確保協同定位的精度。二是基于不同節點拓撲結構的導航算法[13]。一種思路是將傳統的基線概念引入水下無人集群,考慮集群內不同節點之間構成的空間拓撲,計算并確定各節點之間的相對位置;另一種思路則是在可能的情況下,將具備協同條件的其他有人節點引入到水下集群定位中來,構成相對理想的基線類型,從而設計相應的導航算法。
4.3 協同探測技術
水下無人集群通過協同探測技術可擴大探測范圍、提高探測效率,為水下攻防作戰中的偵察、識別、跟蹤及監視等任務提供支撐。
水下無人集群的多個機動節點通過水聲鏈路組網連接后,可以形成一個分布式探測網絡,當網絡中任一節點發現疑似目標后,可請求網內其它節點進行協同探測。通過多個節點獲得的多角度、多方位目標信息可以有效提高目標探測概率;多節點所具備的并行性、冗余度可提升集群容錯能力;融合處理后的多節點測量數據可有效判決目標是否存在。上述集群特征對克服海洋聲場環境復雜多變、目標輻射噪聲快速衰減,提高水下目標探測的準確性有重要意義[14]。
水下無人集群協同探測除需關注水聲建模和自適應采樣等基礎技術之外,還需突破自主式探測、識別及數據融合相關技術,包括自主式傳感器干擾背景平滑處理技術、恒虛警檢測技術、雙/多基地合成孔徑技術、多自主式節點傳感器信息時空統一與數據融合技術、網絡信息融合技術等[15]。
4.4 協同指揮控制技術
水下無人集群協同指揮控制技術主要解決信息綜合處理、威脅判斷、決策以及路徑規劃等問題;在水下有人平臺管控下,主要解決對有人平臺任務分配及路徑規劃信息的接收、處理與執行。無人集群指揮控制關鍵技術主要為以下兩點。
1)無人集群指揮控制架構設計技術
科學合理的指控架構都是促進信息處理、決策以及高效執行的重要基礎。根據對當前人工智能技術發展及其在水下集群中應用效果的預期,有人-無人集群仍將是未來一段時期內裝備研發與運用的主要形式。圖4是一種典型的有人無人協同指控框架。
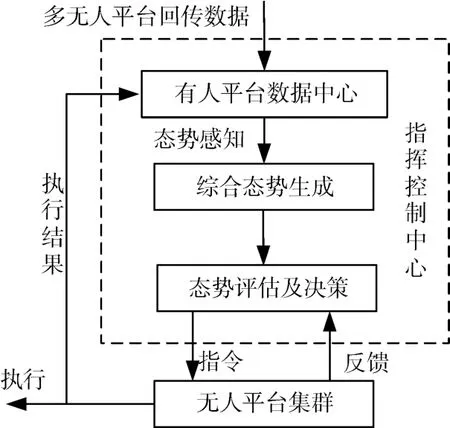
圖4 有人無人協同指揮控制框架
2)任務規劃技術
任務規劃技術包含任務分配與航路規劃兩部分。對于自主決策的無人集群,任務規劃根據獲取的環境信息、目標情況及自身動力性能等參數及約束條件,為集群內各節點分配探測、通信以及打擊等具體任務,并合理規劃出可能的多條備選路徑。有人-無人協同集群則只需根據確定的集群指控架構及由此而確定的指揮與信息關系,由無人集群中的通信中繼主節點接收有人平臺的任務分配指令與路徑規劃信息,執行即可;或集群內全部無人節點同步接收來自有人平臺的指令及信息并執行。
5 國外水下無人集群發展啟示
5.1 無中心、自組織、復合分布式架構
目前無人系統集群多采用集中式架構,如賓夕法尼亞大學“格拉斯帕”(GRASP)實驗室研發的無人機集群,采用集中式規劃與分布式控制相結合的集中式架構,通過集中式的人機交互進行目標分配,建立分布式狀態估計和控制系統,實現無人機集群運動。但環境約束條件和裝備技術發展水平兩方面因素正在改變著水下無人集群體系架構的發展方向。一方面,受特殊的水下環境的約束,信息傳輸、導航定位可達性限制了集群的穩定運作,由于集中式控制模式更強調核心控制節點的作用,所以從無論從長遠還是現實角度來看都不適合水下集群;另一方面,隨著水下單無人平臺智能水平的提高和開放式架構的引入,水下無人集群系統的體系架構也具備了從集中式向無中心、開放式、自適應、自組織、強魯棒性的復合分布式方向發展的條件。
5.2 多維度水下空間作戰應用
未來水下無人集群的應用前景主要如下:1)協同搜索,即多個無人系統配置不同傳感器實現對區域的無縫覆蓋和目標的檢測與跟蹤;2)協同干擾,即多無人系統搭載對抗載荷從不同的位置和角度欺騙、干擾和壓制對方探測裝備;3)協同攻擊,即多個無人裝備在協同狀態下從多個攻擊陣位及攻擊角度對單個或多個目標進行火力齊射;4)協同察/打,即與其他無人系統傳感器進行目標交叉提示,實現無人系統集群“傳感器-射手”快速打擊;5)集群對抗,即在雙方軍事裝備與技術發展到一定程度時,開展的水下無人集群之間的大規模對抗。
5.3 有人-無人協同水下分布式網絡中心戰體系
高效能的水下無人集群將是未來水下空間交戰的重要力量,但技術發展水平又使得在一定時期內無人集群的使用離不開有人平臺的控制。因此,無人裝備與有人裝備組成混合編隊可以彌補當前無人裝備智能化水平難以應對復雜戰場的缺陷,而且可以實現優勢互補。美軍認為,未來水下有人作戰平臺將轉變為協同作戰平臺,大型水下航行器和其他可部署的水下無人系統更多地執行敵海域情報收集、對陸攻擊、反艦作戰等戰術行動。美軍目前正積極在核潛艇上搭載UUV、小型無人飛行器,用以支援兩棲作戰和聯合作戰。未來將形成“水下網絡中心戰”體系,即以水下有人作戰平臺為水下C4KISR中心,綜合利用水下傳感器、水下通信設備、UUV及其集群等核心裝備,在保證水下平臺隱蔽性、安全性的前提下,增強水下戰場透明度,提高戰場感知、決策和打擊能力,從而最大限度地發揮水下體系作戰效能。
6 結語
水下無人系統集群能夠以數量優勢彌補單一平臺功能不足的缺陷,以多數量、小尺寸、低成本的分布式無人作戰平臺替代傳統昂貴的大型有人作戰平臺,可在水下勘探、偵查、對抗打擊等任務中發揮巨大作用,對未來海戰具有重要意義。從水下無人集群的幾種典型應用可以看出,水下協同通信、導航、探測、指揮控制技術等,是開發高水平水下無人集群亟待突破的關鍵技術。在未來水下戰中,可充分利用水下無人集群形成規模優勢,并在此基礎上發展有人-無人協同作戰系統,可以更好地完成對抗環境下的多維度水下空間作戰任務。