低成本MIMU車載組合導(dǎo)航聯(lián)邦濾波算法*
2021-03-16 09:21:52
艦船電子工程 2021年2期
(海軍工程大學(xué)導(dǎo)航工程系 武漢 430033)
1 引言
縱觀未來戰(zhàn)爭發(fā)展趨勢,無人作戰(zhàn)設(shè)備因其強(qiáng)機(jī)動性、低成本和小體積等優(yōu)勢,有望取代士兵以及傳統(tǒng)作戰(zhàn)裝備成為主要的作戰(zhàn)力量之一,以今年沙特石油設(shè)施遭受低成本集群無人機(jī)襲擊事件為例,帶給我們的啟示是低成本無人武器裝備是未來戰(zhàn)爭形勢的一個發(fā)展方向。隨著作戰(zhàn)任務(wù)日趨復(fù)雜,對無人車、無人艇等無人作戰(zhàn)裝備提出了更高的導(dǎo)航定位要求。對于高精度的慣性導(dǎo)航系統(tǒng)(Inertial Navigation System,INS)來說,高性能的慣性傳感器與先進(jìn)的系統(tǒng)技術(shù)可以提供載體高精度的導(dǎo)航信息,但體積大、價格貴、操作維護(hù)復(fù)雜,不合適在體積小、成本受限、工作環(huán)境惡劣的低成本、集群化的無人作戰(zhàn)裝備中推廣使用。基于微機(jī)電系統(tǒng)(Micro Electro Mechanical System,MEMS)技術(shù)的微慣性測量單元(Micro Inertial Measurement Unit,MIMU)使這一問題得到了有效解決,以其低成本、低功耗、高集成度、抗高過載等特點(diǎn)[1~3],適合低成本無人設(shè)備的推廣使用。但傳感器自身存在精度低、漂移大等缺點(diǎn)[4~5],只能在短時間內(nèi)提供可靠的信息,嚴(yán)重限制了MIMU的應(yīng)用范圍,利用組合導(dǎo)航技術(shù)提高基于MIMU的導(dǎo)航系統(tǒng)整體性能和精度已成為一種重要途徑。隨著MEMS慣性技術(shù)的快速發(fā)展,國內(nèi)外均開展了以MIMU為核心的多傳感器組合導(dǎo)航系統(tǒng)設(shè)計和研究。文獻(xiàn)[6~7]以慣性/衛(wèi)星組合導(dǎo)航方法為技術(shù)背景,研究了基于MIMU/GPS的低成本組合導(dǎo)航定位方案,通過改進(jìn)濾波算法提高系統(tǒng)組合定位精度,但仍存在組合精度較差,尤其是復(fù)雜環(huán)境下的姿態(tài)估計精度。文獻(xiàn)[8~9]針對MEMS慣性器件自身特點(diǎn),通過引入磁力計和GNSS輔助信息,從而實(shí)現(xiàn)不同系統(tǒng)間的優(yōu)勢互補(bǔ),但未考慮信息融合過程中子傳感器失效或者故障的問題。
綜上,本文以低成本無人車載導(dǎo)航實(shí)際需求為應(yīng)用背景,通過多傳感器信息融合以及信息故障檢測,提出一種新的基于MIMU的低成本車載組合導(dǎo)航設(shè)計方案,實(shí)現(xiàn)MIMU、GNSS、MAG三者優(yōu)勢互補(bǔ),提高以MIMU為核心的組合導(dǎo)航系統(tǒng)綜合性能。
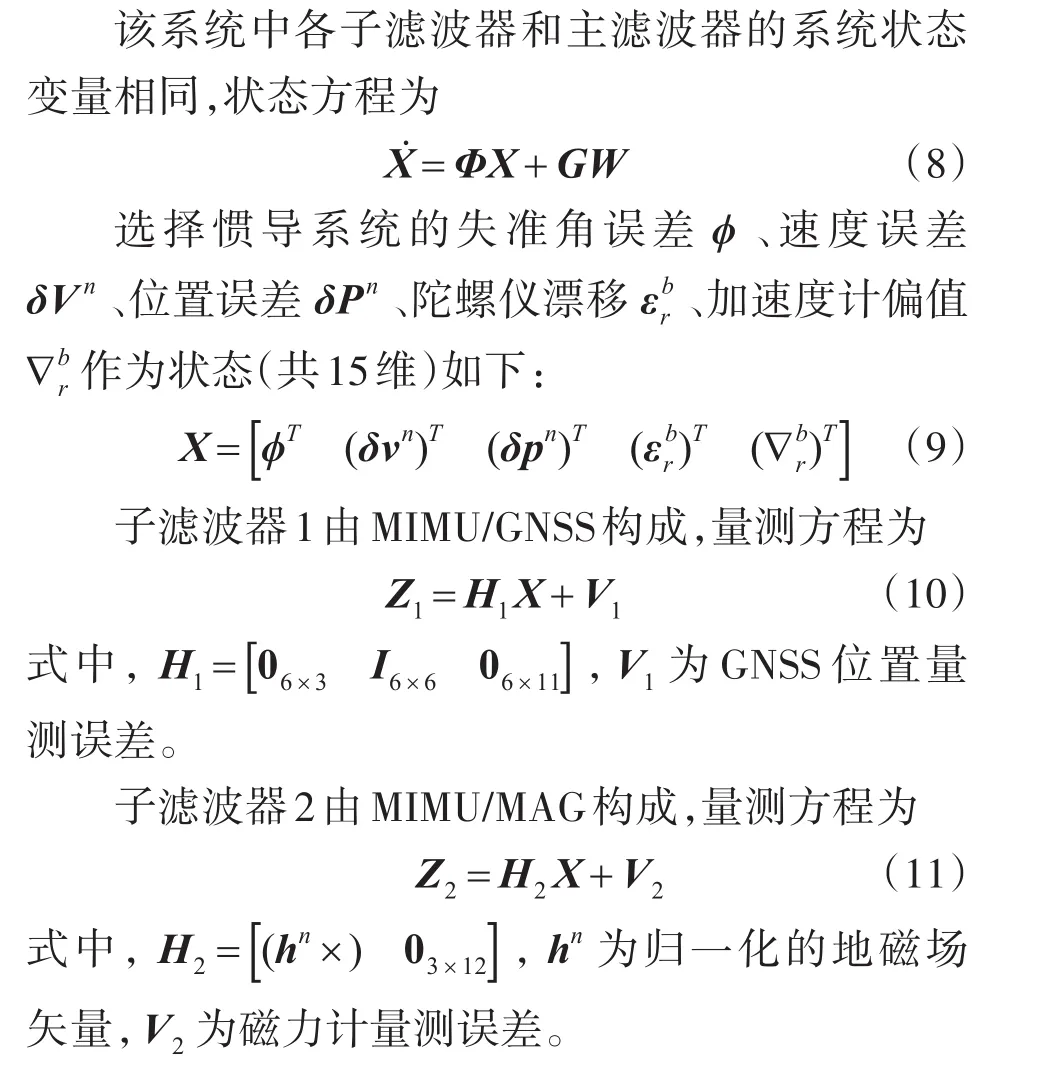
2MIMU/GNSS/MAG組合導(dǎo)航方案設(shè)計
要實(shí)現(xiàn)組合導(dǎo)航系統(tǒng)各傳感器信息的優(yōu)勢互補(bǔ),信息融合和濾波算法是關(guān)鍵,主要研究熱點(diǎn)集中在如何進(jìn)一步提高組合導(dǎo)航系統(tǒng)的精度、實(shí)時性和可靠性等方面[10~11]。目前,卡爾曼濾波技術(shù)常用于多傳感器信息融合,按照信息處理方式的不同,分為分散式卡爾曼濾波和集中式卡爾曼濾波。聯(lián)邦卡爾曼濾波是一種基于信息分配原理的分散式卡爾曼濾波,其主要優(yōu)勢有:
1)容錯性能好。當(dāng)子系統(tǒng)出現(xiàn)故障時,能夠迅速檢測和隔離故障子系統(tǒng),且能夠利用正常子系統(tǒng)的估計信息實(shí)現(xiàn)對狀態(tài)量的最優(yōu)估計。
2)計算量小。從子系統(tǒng)的局部濾波到全局濾波的最優(yōu)估計算法簡單,便于算法的執(zhí)行。
典型的聯(lián)邦卡爾曼濾波算法包含以下過程[12~13]:
1)濾波初始值設(shè)定。
2)時間更新。各子濾波器獨(dú)立進(jìn)行時間更新:

3)量測更新。各子濾波器接收子系統(tǒng)量測信息并獨(dú)立進(jìn)行量測更新:
4)信息融合。把各子濾波器的局部最優(yōu)估計信息進(jìn)行融合,方法如下:
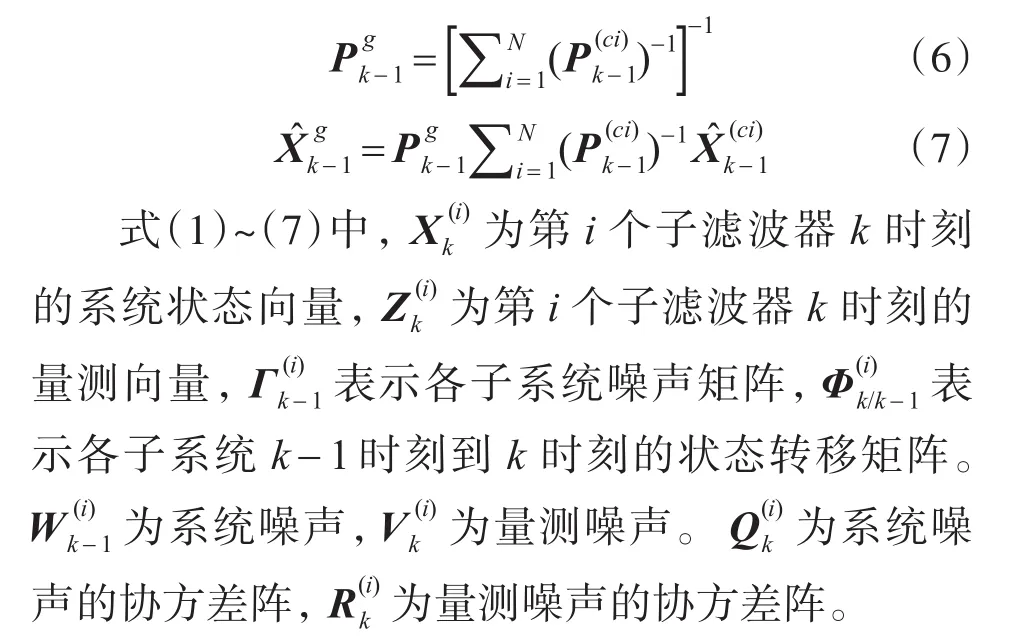
為提高系統(tǒng)容錯能力,設(shè)計無重置的聯(lián)邦濾波結(jié)構(gòu)進(jìn)行信息融合,將MIMU作為主參考系統(tǒng),組成MIMU/GNSS和MIMU/MAG兩個子系統(tǒng)。該組合導(dǎo)航系統(tǒng)如圖1所示。
圖1 MIMU/GNSS/MAG組合導(dǎo)航系統(tǒng)結(jié)構(gòu)圖
3 信息故障檢測
利用組合導(dǎo)航技術(shù)提高導(dǎo)航系統(tǒng)整體性能已成為一種重要途徑,但系統(tǒng)傳感器的增加意味著整個組合導(dǎo)航系統(tǒng)的復(fù)雜性和故障率也隨之增加,必須及時對傳感器故障信息進(jìn)行診斷并隔離,才能保證組合導(dǎo)航系統(tǒng)的可靠性。狀態(tài)χ2檢驗(yàn)法和殘差χ2檢驗(yàn)法常用于組合導(dǎo)航系統(tǒng)的故障檢測與隔離[14],前者在狀態(tài)遞推的過程中沒有進(jìn)行量測更新,降低了故障檢測的靈敏度,而后者對軟故障的檢測不十分有效。因此,這里采用新息序列檢測法,利用最新的N個測量統(tǒng)計構(gòu)成檢驗(yàn)統(tǒng)計量來進(jìn)行辨識量測信息偏差:

4 試驗(yàn)驗(yàn)證
4.1 仿真試驗(yàn)
為了驗(yàn)證MIMU/GNSS/MAG組合導(dǎo)航方案的有效性,在相同試驗(yàn)條件下:對比MIMU/GNSS、MIMU/GNSS/MAG兩種組合導(dǎo)航方案性能。仿真試驗(yàn)?zāi)M無人車實(shí)際作業(yè)環(huán)境,包含靜止、加速、轉(zhuǎn)彎等運(yùn)動狀態(tài)。仿真時間設(shè)置為600s,初始位置為緯度34°,經(jīng)度108°,高度0m ;初始位置誤差5m;初始航向誤差為1°,水平姿態(tài)角誤差為0.5°;初始速度誤差 0.1m/s;陀螺儀偏差為10°/h(1σ),陀螺隨機(jī)游走為1°/;加速度計偏差為0.5mg(1σ),加速度隨機(jī)游走為;磁強(qiáng)計測量精度為50nT(1σ),地磁場模型誤差為100nT;GNSS接收機(jī)定位精度為5m。
MIMU/GNSS、MIMU/GNSS/MAG兩種組合導(dǎo)航方案估計誤差結(jié)果如圖2~4所示。

圖2 姿態(tài)估計誤差

圖3 速度估計誤差

圖4 位置估計誤差
以姿態(tài)估計誤差為例,誤差統(tǒng)計特性如表1所示。

表1 姿態(tài)估計誤差統(tǒng)計特性表
從仿真結(jié)果可以看出:最優(yōu)的解決方案是MIMU/GNSS/MAG組合導(dǎo)航方案,該組合導(dǎo)航方案輸出姿態(tài)誤差小,且姿態(tài)估計能夠快速收斂,其中水平姿態(tài)角誤差在±0.5°范圍內(nèi),航向角誤差在±1°范圍內(nèi)。MIMU/GNSS組合導(dǎo)航方案處在水平方向加速度較小的運(yùn)動狀態(tài)時,由于航向角誤差可觀測性較差,所以姿態(tài)和航向角誤差增大。
4.2 車載試驗(yàn)
為進(jìn)一步對比兩種組合導(dǎo)航方案的綜合性能,在開闊地帶進(jìn)行車載試驗(yàn)。試驗(yàn)以某公司研制的型號為“KY-INS500U”的高精度光纖捷聯(lián)慣性/衛(wèi)星組合導(dǎo)航系統(tǒng)(簡稱“光纖慣導(dǎo)”)(航向姿態(tài)精度0.1°,水平姿態(tài)精度0.01°)作為參考;以預(yù)處理后的MTi-100慣性測量單元輸出的陀螺、加速度計及磁力計數(shù)據(jù)作為解算數(shù)據(jù),采用光纖慣導(dǎo)的衛(wèi)星定位數(shù)據(jù)進(jìn)行信息融合,初始對準(zhǔn)數(shù)據(jù)由光纖慣導(dǎo)獲得。
試驗(yàn)場景及設(shè)備如圖5所示。試驗(yàn)方案為車載試驗(yàn)前,將MTi-100慣性測量單元與光纖慣導(dǎo)固定分別安裝在車體內(nèi)部,使二者航向保持平行且與車輛前進(jìn)方向保持基本一致。試驗(yàn)車的起始位置選在無大功率電磁干擾的空曠環(huán)境中,以測試補(bǔ)償車體本身對磁力計的干擾。GNSS天線安置在車頂,試驗(yàn)場地選在了空曠無遮擋的區(qū)域,以保證信號的正常接收,試驗(yàn)過程中GNSS收星數(shù)保持在13~26顆。

圖5 試驗(yàn)場景及設(shè)備
MIMU/GNSS、MIMU/GNSS/MAG兩種組合導(dǎo)航方案估計誤差結(jié)果如圖6~8所示。

圖6 姿態(tài)估計誤差
以姿態(tài)估計誤差為例,姿態(tài)估計誤差統(tǒng)計特性如表2所示。

表2 姿態(tài)估計誤差統(tǒng)計特性表
從試驗(yàn)結(jié)果可以看出:
1)相比仿真試驗(yàn)結(jié)果,兩種組合方案的誤差均有增大,分析原因可知,除了算法誤差外,在車載試驗(yàn)的過程中,由于試驗(yàn)場地有細(xì)碎砂礫,且汽車本身發(fā)動機(jī)抖動,導(dǎo)致傳感器處在振動頻率較高的惡劣條件下,對MIMU中的陀螺零偏和加速度計偏值進(jìn)行估計時發(fā)現(xiàn),收斂后的估計結(jié)果均大于標(biāo)稱精度。
2)由于GNSS能夠提供一個穩(wěn)定的位置信息,所以MIMU/GNSS和MIMU/GNSS/MAG組合導(dǎo)航方案中位置和速度誤差能夠收斂,從圖7、圖8可以看出,MIMU/GNSS和MIMU/GNSS/MAG兩種組合導(dǎo)航方案的速度和位置誤差曲線基本重合,其中速度誤差在±1.5m/s范圍內(nèi),位置誤差在±10m范圍內(nèi)。

圖7 速度估計誤差
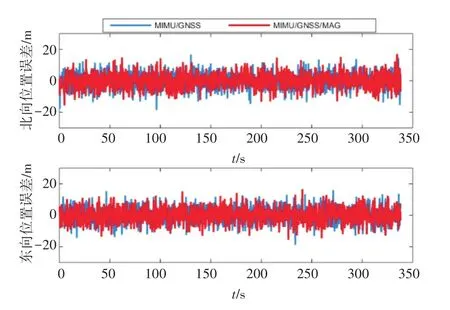
圖8 位置估計誤差
3)關(guān)于姿態(tài)估計,最優(yōu)的解決方案是MIMU/GNSS/MAG組合導(dǎo)航方案,以航向角誤差為例,MIMU/GNSS/MAG聯(lián)邦濾波組合導(dǎo)航方案航向角誤差能夠抑制在±1.5°以內(nèi)。從車載實(shí)驗(yàn)結(jié)果可以看出,引入校準(zhǔn)后的磁力計信息可以有效提高組合導(dǎo)航系統(tǒng)的航向精度,驗(yàn)證了仿真試驗(yàn)的正確性。
4.3 容錯試驗(yàn)
為驗(yàn)證該組合導(dǎo)航方案的容錯性能,現(xiàn)模擬真實(shí)使用環(huán)境,設(shè)置故障條件如下:在第300s~320s,對GNSS定位結(jié)果中加入10倍量測誤差的突變故障。按照設(shè)置的仿真條件對比MIMU/GNSS/MAG有無故障檢測與隔離的組合效果。設(shè)置新息序列故障檢測法的誤警率為0.01,查χ2分布臨界值表得對應(yīng)的門限值為30.58。
故障檢測效果如圖9所示,從圖中可以看出,該方法可以有效檢測到故障,故障發(fā)生時間為300s~320s,該方法在301s~320s檢出故障,延遲1s。

圖9 緩變故障統(tǒng)計量
為進(jìn)一步分析故障信息對組合導(dǎo)航系統(tǒng)性能帶來的影響,現(xiàn)以導(dǎo)航誤差為例進(jìn)行分析。圖10~12為進(jìn)行了故障檢測及隔離與未進(jìn)行故障檢測及隔離的組合導(dǎo)航系統(tǒng)誤差曲線。

圖10 姿態(tài)誤差曲線

圖11 速度誤差曲線

圖12 位置誤差曲線
從圖中可以看出,在GNSS發(fā)生故障期間,新息序列故障檢測法由于及時檢測出故障信息并進(jìn)行隔離,導(dǎo)航信息誤差發(fā)散得到抑制,現(xiàn)以位置誤差為例進(jìn)行說明。故障期間,未進(jìn)行故障檢測及隔離的組合導(dǎo)航系統(tǒng)北向位置誤差在320s時達(dá)到最大為39.3m,東向位置誤差在320s時達(dá)到最大為37.23m;進(jìn)行故障檢測及隔離的組合導(dǎo)航系統(tǒng)北向位置誤差在320s時達(dá)到最大4.579m,東向位置誤差在320s時達(dá)到最大為10.150m。
表3列出了結(jié)合有無故障檢測及隔離的聯(lián)邦濾波導(dǎo)航系統(tǒng),在相同仿真試驗(yàn)條件下得到的導(dǎo)航信息誤差標(biāo)準(zhǔn)差對比。可以看出,本文設(shè)計的組合導(dǎo)航方案,能夠有效檢測到故障并進(jìn)行隔離,使整個組合導(dǎo)航系統(tǒng)受到故障量測量的影響更小。
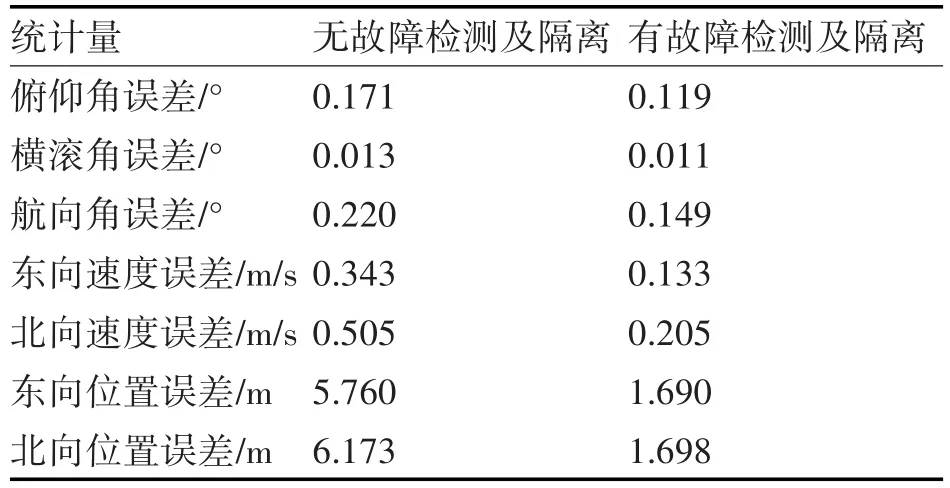
表3 導(dǎo)航信息誤差標(biāo)準(zhǔn)差對比
5 結(jié)語
本文針對傳統(tǒng)低成本車載組合導(dǎo)航方案中存在的姿態(tài)估計精度較差以及系統(tǒng)容錯性較差等問題,從多傳感器信息融合及信息故障檢測兩方面,設(shè)計了基于聯(lián)邦濾波結(jié)構(gòu)的MIMU/GNSS/MAG組合導(dǎo)航方案,能夠?qū)崿F(xiàn)不同系統(tǒng)間的優(yōu)勢互補(bǔ),以提供復(fù)雜環(huán)境下的導(dǎo)航定位信息。試驗(yàn)驗(yàn)證了該方案能夠有效提高低成本車載組合導(dǎo)航系統(tǒng)的輸出精度和穩(wěn)定性,有望解決單一導(dǎo)航方式精度低、可靠性差、抗干擾能力弱等問題,具有一定的工程應(yīng)用價值。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
中華手工(2017年2期)2017-06-06 23:00:31
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
中外會展(2014年4期)2014-11-27 07:46:46