主動聲納接收信號建模研究*
2021-03-16 09:22:34
艦船電子工程 2021年2期
(上海船舶電子設備研究所 上海 201108)
1 引言
主動聲納是探潛反潛的主要裝備[1],可以對安靜型潛艇進行探測。目標回波信號作為主動聲納信號處理的基礎,而根據試驗所得到的接收信號中含有混響和環境噪聲,目標回波信噪比低,無法提取目標回波信號。因此,在需要對主動聲納進行技術論證或對仿真系統進行性能評估時,聲納接收信號仿真模型的構建顯得更為重要。
主動聲納接收信號可看作海洋混響、海洋環境噪聲和目標回波信號的疊加。通過分析海洋混響的統計模型、目標回波模型、以及海洋環境噪聲的模擬,可以實現主動聲納接收信號的建模及仿真。現有的主動聲納信號建模方法多數也是基于此實現的[2~4]。目標回波模型的構建是主動聲納接收信號建模的關鍵,本文在亮點回波模型及其相關理論的基礎上[5~6],考慮亮點之間的幾何遮擋問題,提出一種更為細化的亮點遮擋面積計算方法,以精確模擬在不同態勢下亮點回波的時延變化和強度起伏為目標,建立相應的目標亮點回波模型,并通過仿真分析進行驗證。
2 主動聲納接收信號建模
2.1 海洋混響模擬
混響是主動聲納工作時特有的一種背景噪聲,它是主動聲納發射的脈沖信號在照射到海洋中隨機分布的散射體以及起伏的界面后產生的隨機信號。混響生成流程圖如圖1所示。
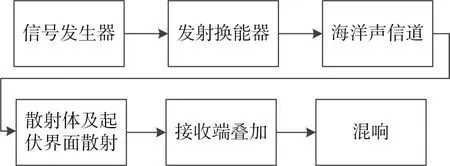
圖1 混響生成流程圖
混響雖然也是一種非線性非平穩的隨機信號,不過其性質和海洋噪聲卻完全不同。混響最能區別于噪聲海洋環境的特征就是混響與發射信號波形有一定的相關性,且混響強度和發射信號的能量呈正相關的關系。
遠距離探測聲納一般發射長脈沖信號,在發射脈寬增大時,可以將發射信號的混響看作多個連續發射的短脈沖所產生的混響遷都的累加。混響強度可以表示為

其中R0是和t,τ無關的系數;β是指數衰減系數,一般是由于海水吸收和邊界損失有關。m的大小與混響的機理、傳播條件等因素有關[7]。
本文旨在建立能夠反映混響規律及特征的混響模型,根據混響的統計模型與混響強度公式可以得到模擬混響。假設發射信號是中心頻率為2000Hz,帶寬為30Hz的LFM信號,脈沖寬度為1s,仿真得到的混響波形圖及時頻分析如圖2和圖3

圖2 窄帶LFM混響波形
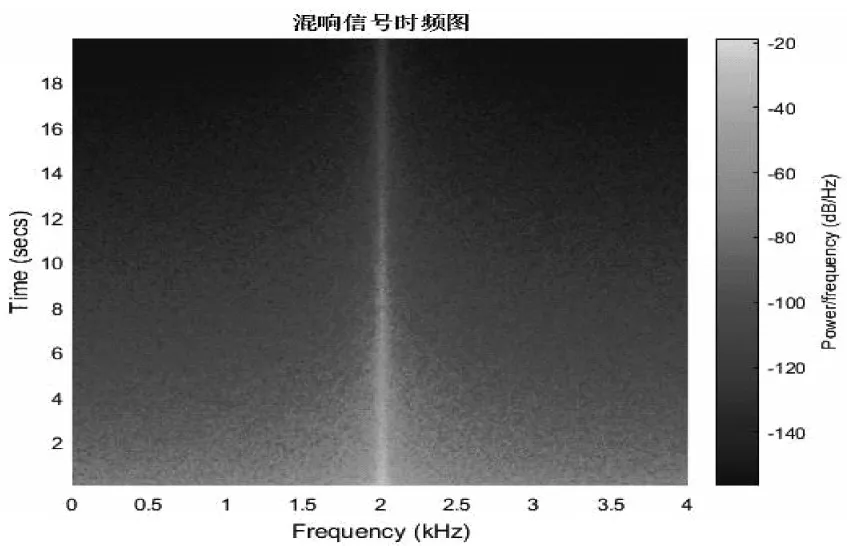
圖3 混響時間-頻率歷程圖
2.2 海洋環境噪聲
構成海洋環境噪聲的主要噪聲源有潮汐、海底湍流、地震擾動、航船噪聲及風成噪聲等,多種噪聲源合成的環境噪聲存在于海洋中的任意時刻和所有地點。實際的海洋噪聲具有時變性和無期望性,因而不可能用一個確定的數學模型來描述。在實際仿真中,根據海洋環境噪聲譜級與高斯白噪聲的頻域信息,即可模擬所需要的環境噪聲。海洋環境噪聲譜級參照淺海噪聲譜級經驗公式進行計算[8]。海洋環境噪聲的仿真結構如圖4所示。
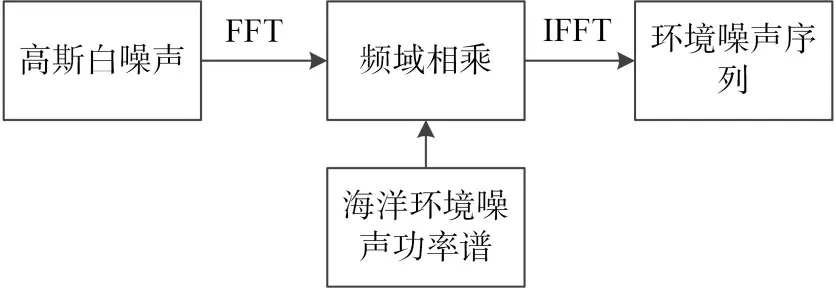
圖4 環境噪聲序列仿真結構
仿真環境噪聲頻段設為0~30KHz,海況為三級,得到輸出的仿真噪聲序列如圖5所示。

圖5 海洋環境噪聲波形
2.3 水下目標回波
亮點回波模型把水下目標看作一個響應系統,回波信號就是系統在照射信號激勵下的響應。目標等效為多個亮點,目標回波則可看作多個亮點回波的總和。根據亮點模型理論,單個亮點傳輸函數是:

r是聲納到目標的距離,θ、φ分別是信號的水平入射角和垂直俯仰角,本文中假設聲納與目標同一深度,即取垂直俯仰角為0。Ai是亮點回波的幅度,w(v)是目標運動產生的多普勒頻移,τi是亮點間由聲程差引起的相對時延,φ則是回波信號的相位改變。因此對應多個亮點,其傳輸函數為

根據亮點回波模型和理論,選取簡單潛艇模型作為目標,將圖6所示水下目標的艇首、前艇體、艦橋、后艇體和艇艉等效為在同一條軸心線上的5個剛性球體來模擬目標亮點。

圖6 水下目標的亮點模型
由于目標不同位置處的目標強度明顯不同,為更好地模擬目標強度的差異性,可以將目標亮點細化為不同半徑的剛性球體。根據文獻[10]中給出的球體目標強度公式:

式中a為球體半徑。同時又因為目標的結構復雜,不同亮點處的反射能力也不同,暫時不考慮聲波在水中傳播時的損失,定義反射系數ci為反射聲強比上入射聲強。以艦橋中心為參考點,參照文獻[6,9]中建立的亮點模型,設置各亮點的相對位置、球體半徑和反射系數如表1。
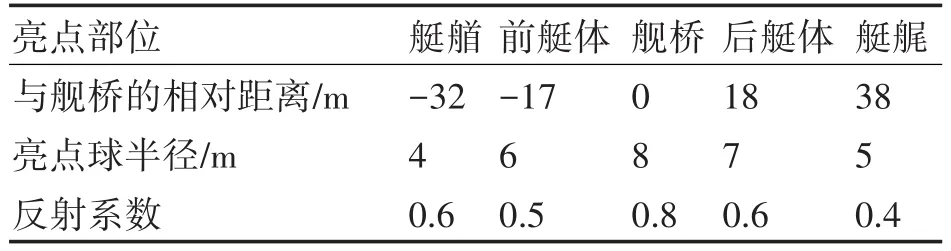
表1 各亮點參數
當入射聲波以不同角度照射目標時,得到的有效散射面積也不同,映射到已建立的亮點模型,可以通過不同入射角度下剛性球體之間被遮擋的投影面積的變化來近似模擬各個亮點目標強度的改變。在仿真中,按照入射聲波到達的時間先后對所有亮點進行排序,定義相應的遮擋系數Hij(θ)來表征前一個目標亮點剛性球體j對后一個目標亮點i的遮擋效果。亮點球體的目標強度與有效投影面積成正相關,遮擋系數的大小定義為剛性球體被遮擋的投影面積占該剛性球體全部投影面積的比值。
定義Sij為在入射方向上前一個亮點j在后一個亮點i上的投影面積,其具體計算表達式可歸納如下。
當剛性球體i半徑大于剛性球體j時,遮擋面積Sij為
聲納與目標之間的相對運動將會產生多普勒頻移。假設聲納固定不動,考慮目標在徑向運動速度為v的情況下,其多普勒頻移為

θ是聲波入射角度,c為水下聲速。
綜合上述分析,得到目標的時域表達式為

其中φi是各亮點發生反射時產生的隨機相位。τi是各亮點的傳播時延:

r是聲納與水下目標之間的距離,Li是各亮點與參考點之間的相對距離。
基于本文建立的回波亮點模型,以高頻信號對目標模型的所有舷角進行照射,并對接收到的回波信號進行匹配相關處理,得到如圖7所示的目標模型二維散射圖。從圖中可以看出目標模型的二維散射圖有以下特點:

圖7 目標模型二維散射函數圖
1)從艇艏和艇艉方向入射時,亮點之間彼此離散且跨越尺度大,亮點之間最大間隔與目標尺度相當;
2)入射方向趨向正橫方向時,亮點間隔逐漸減小,個數在正橫方向最少,且亮點背景弱;
3)不同的照射角度,各個亮點的顯示強度有明顯差異。
本文在對目標回波信號建模時忽略了聲波在亮點之間的二次反射、繞射和再輻射等復雜過程,使仿真得到簡化。根據實際測量和理論上的潛艇模型的二維聲散射圖都是典型的蝴蝶圖[11~12],其顯著特征是各亮點的顯示強度隨著方位變化而變化,亮點之間尺度間隔最大在艇艏和艇艉入射方向,最小在正橫方向。顯然,這些特性與本文建立的亮點模型保持一致,也說明該建模方法可以模擬隨水下目標態勢變化的目標回波的時延變化和強度起伏。
3 結語
本文在對主動聲納接收信號進行建模的框架下,依次對海洋混響和環境噪聲進行了建模仿真,并重點結合亮點模型理論,考慮亮點之間的幾何遮擋問題,通過細化計算遮擋面積來模擬水下目標在不同態勢下亮點回波的時延變化和強度起伏,經仿真驗證分析了該建模方法的有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03