衛星固定站天線控制系統改造的探討
2021-03-17 09:55:52陳濤,徐平
數字通信世界 2021年2期
關鍵詞:信號
陳 濤,徐 平
(1.南京熊貓漢達科技有限公司,江蘇 南京 210004;2.中國衛通集團股份有限公司,北京 100094)
隨著衛星通信高速的發展,它從一個異乎尋常的備選手段發展為主流傳輸技術,通過通信衛星進行中繼,衛星通信不受距離限制,可廣泛用于傳輸語音、視頻和數據等通信業務,隨時隨地向用戶提供高質量、高可靠通信服務。
衛星固定站是衛星通信系統中的一種重要站型,它站址固定通過同步靜止軌道衛星接入整個衛星通信網絡,建立與網內其他站點的通信連接。衛星固定站靜中通天線口徑在2.4m-3m之間,一般采用環焦天線,其日常的性能直接影響衛星固定站的通信效果和傳輸質量。初期的大部分天線特別是口徑在2.4m-5m之間的天線都未安裝天線自動控制系統,而是靠人工手動調整驅動電機進行對星,嚴重影響了衛星固定站天線跟蹤對準通信衛星的精準度,操作相對復雜。
本文對Ku頻段衛星固定站天線控制系統改造進行探討,提出更好的改造方案。改造后的天線控制系統將控制與驅動電路高度集成,以DSP為核心進行天線位置檢測和控制,通過繼電器驅動交流電機,支持本地及遠程控制。改造后的衛星固定站天線可通過天線自動控制系統進行實時的天線跟蹤,無需人為干預。
1 原衛星固定站組成
衛星固定站的組成,簡單來說包括:天線單元、射頻設備單元、信道設備單元、終端設備單元、監控設備單元、電源設備單元等。如圖1所示。

圖1 衛星固定站組成
天線單元組成如表1所示。

表1 天線單元組成
⊙主反射面組合是由中心筒(饋源系統安裝在內)、若干單片面板和若干輻射梁、支架組裝而成。
⊙天線副面組合由若干副面支撐桿、支架、副面和若干調節絲桿組成。
⊙饋源系統包括波導、喇叭、雙工器、活動法蘭。
⊙中心筒對上連接天線反射面、對下連接天線座架。
⊙方位傳動組合主要為方位調節絲桿、方位電機,絲桿采用鋼板焊接件,安裝時直接與基座固定。
⊙俯仰傳動組合主要為俯仰調節絲桿、俯仰電機,絲桿為鋼板焊接件,安裝時直接與天線立柱固定。
⊙天線立柱為圓筒結構,對上通過鋼板焊接與中心筒相連,對下立柱管身上通過鋼板焊接與立柱斜撐及方位轉動座相連。
⊙立柱斜撐作用是對天線立柱進行支撐,由兩根撐腿組成,每根撐腿是通過鋼管與鋼板熔接而成。
⊙天線控制盒由本控開關、方位繼電器、俯仰繼電器以及 380VAC的空氣開關組成。天線單元組成具體如圖 2所示。

圖2 衛星固定站天線單元組成
衛星固定站天線單元與其他設備及天線控制系統的連接關系根據圖 3所示。采用三相五線制 380VAC電源通過繼電器來控制方位與俯仰電機帶動相應絲桿進行天線位置的調整。
2 衛星固定站天線控制系統改造
原衛星固定站的天線單元能夠滿足在一定專業水平的人員操作下借助專業儀器、儀表進行天線的對星操作。操作人員在實際使用中存在相當多不便之處:
⊙無界面明確顯示當前天線狀態及參數,影響操作人員對天線的狀態判斷和操作。
⊙無自動跟蹤功能,無法精確對星,需要專業技術人員干預且借助專業儀器、儀表。
⊙一旦遇到換星等需要天線大范圍轉動時,操作耗時耗力,且轉動精度不夠。
為改善以上缺點,對天線控制系統進行改造,改造后的天線控制系統可直觀顯示天線狀態及參數,并可遠程自動控制天線,根據反饋的信號電平值實現實時自動跟蹤且可存儲多顆衛星天線位置,實現自動換星對星。
天線單元改造組成如表 2所示。
天線控制系統如圖 4所示,天線控制系統集成控制電路、驅動電路及信標接收機。控制電路是控制中心,以 DSP芯片及相應的軟件為核心,實現天線的位置檢測與各種模式的控制、故障檢測與保護、與站內監控設備交互等功能。

表2 天線單元改造組成
旋轉變壓器作為傳感器輸出的信號經 DSP進行A/D轉換、運算處理及校正后,得到當前天線位置。該位置參數除顯示外,還與天線目標位置比較,獲得天線轉向的具體參數。集成在驅動電路中的繼電器對轉向的具體信號進行放大,從而控制方位電機及俯仰電機驅動天線轉動。

圖4 天線控制系統
天線控制系統具有完善的限位、故障告警及自動保護功能。限位主要分為軟限位和開關限位。故障類型有:驅動電路故障、檢測位置回路故障、控制位置回路故障、交流電源不正常等。檢測到限位或故障后,天線控制系統除顯示報警外,會立刻采取保護措施封鎖有關控制功能,確保設備及被控天線運行安全,同時上報站內監控設備,提示操作人員方便維修。

圖5 改造后的衛星固定站天線單元連接關系
改造后的衛星固定站天線單元具體連接關系如圖5所示。現場連接線如圖 6所示。
操作人員通過天線控制系統較方便的控制天線找到目標衛星。下面分具體舉例說明尋找目標衛星的天線控制方法。
(1)尋找未知信標的目標衛星,控制方法如下:
a.根據目標衛星經度,用預置衛星模式將天線轉到理論位置。
b.通過儀器觀察衛星信標,在無明顯信號時,采用自動搜索模式大范圍搜索衛星,收到信標信號后停止搜索。
c.用手控轉動模式控制天線使接收信號接近最大。
d.通過儀器查找衛星信標或其他跟蹤信號,調整好跟蹤信號回路。
e.在參數表中設置好“跟蹤信號頻率”及“信號電平最大值”。
f.置步進跟蹤狀態使天線對準衛星。
g.退出跟蹤狀態,通過儀器觀察信號,調整極化使接收信號最佳。
h.在衛星表中存儲該衛星對應的天線位置。
(2)尋找已知跟蹤信號的目標衛星,控制方法如下:
a.根據目標衛星經度,用預置衛星模式將天線轉到理論位置。
b.調整好跟蹤信號回路。
c.在參數表中設置好“跟蹤信號頻率”及“信號電平門限值”。
d.當收到的衛星信標達到預設信號電平門限值,進入自動跟蹤狀態;否則,通過手控轉動或自動搜索模式找到衛星后,置步進跟蹤狀態使天線對準衛星。
e.退出跟蹤狀態,通過儀器觀察信號,調整極化使接收信號最佳。
f.在衛星表中存儲該衛星對應的天線位置。
(3)尋找已存儲的目標衛星,控制方法如下:
a.根據目標衛星經度,用預置衛星模式將天線轉到目標衛星位置。
b.調整好饋源極化。
c.調整好跟蹤信號回路。
d.在參數表中設置好“跟蹤信號頻率”及“信號電平最大值”。
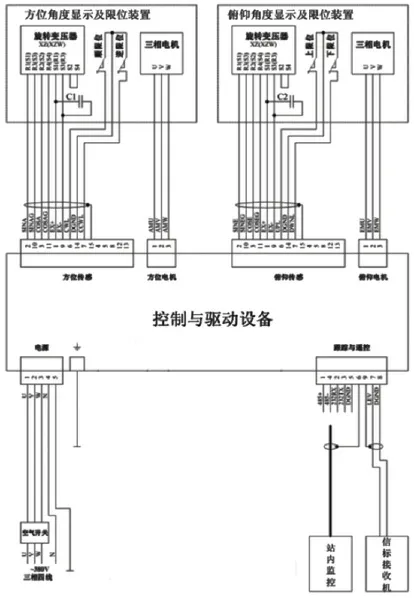
圖6 現場連接線圖
e.置步進跟蹤狀態使天線對準衛星。
3 結束語
衛星固定站天線控制系統改造后天線的操作更簡便,跟蹤精度更高。操作人員在室內可進行天線的控制,調整到位后,可進入自動跟蹤狀態實現自動操作。天線狀態、天線信號出現異常時,界面自動提示操作人員。衛星通信系統固定站的業務通信保障效果在天線控制系統改造后更加穩定。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
