飛控系統(tǒng)半物理仿真教學(xué)實驗探究
2021-03-18 04:33:23唐鵬張文濤劉曉鋒
教育教學(xué)論壇 2021年49期
唐鵬 張文濤 劉曉鋒
[摘 要] 目前,飛行控制系統(tǒng)教學(xué)實驗主要以Matlab/Simulink建模仿真為主,傳統(tǒng)手工編碼設(shè)計控制器軟件的設(shè)計方法面臨教學(xué)難度大、調(diào)試過程復(fù)雜等問題。基于快速原型技術(shù),引入三軸轉(zhuǎn)臺、飛控計算機等硬件設(shè)備,設(shè)計了半物理仿真教學(xué)實驗。教學(xué)結(jié)果表明,教學(xué)實驗?zāi)軌驇椭鷮W(xué)生理解數(shù)學(xué)仿真和實際飛行之間如操縱指令的延遲、傳感器特性干擾、離散域和連續(xù)域之間的差異,了解飛行器的姿態(tài)運動及地面實驗的方法,有利于提高學(xué)生的實踐能力和綜合解決問題的能力。
[關(guān)鍵詞] 飛行控制系統(tǒng);基于模型;半物理仿真;教學(xué)實驗
[基金項目] 2020年度北京航空航天大學(xué)本科生教學(xué)改革項目“飛行器適航技術(shù)專業(yè)課程設(shè)計教學(xué)實踐”
[作者簡介] 唐 鵬(1980—),男,北京人,博士,北京航空航天大學(xué)交通科學(xué)與工程學(xué)院實驗師,主要從事飛行控制與試飛研究;張文濤(1995—),男,河南焦作人,北京航空航天大學(xué)交通科學(xué)與工程學(xué)院2019級交通運輸工程專業(yè)碩士研究生,研究方向為無人機飛行控制系統(tǒng)半物理仿真和地面驗證;劉曉鋒(1979—),男,遼寧凌源人,博士,北京航空航天大學(xué)交通科學(xué)與工程學(xué)院副教授(通信作者),主要從事系統(tǒng)建模與控制飛行研究。
[中圖分類號] C229.29 ? [文獻(xiàn)標(biāo)識碼] A ? [文章編號] 1674-9324(2021)49-0082-04 ? ?[收稿日期] 2021-04-20
一、引言
飛行控制系統(tǒng)的開發(fā)遵循設(shè)計—實現(xiàn)—驗證的V模式,地面設(shè)計與試驗主要包括以下步驟:動力學(xué)建模、控制器設(shè)計、數(shù)字仿真驗證、控制算法/軟件實現(xiàn)、半物理仿真驗證[1-3]。在傳統(tǒng)的飛控系統(tǒng)設(shè)計中,完成飛行控制律設(shè)計和數(shù)字仿真驗證后,需要根據(jù)飛控硬件系統(tǒng)開展機載代碼編寫、測試。而目前基于模型的飛控系統(tǒng)開發(fā)技術(shù)方興未艾,在飛控工程師基于Matlab/Simulink設(shè)計平臺完成控制律設(shè)計后,可以直接生成機載代碼,大幅提升飛控系統(tǒng)研發(fā)效率。與此同時,飛控系統(tǒng)的地面試驗驗證作為必要的后續(xù)測試與驗證手段,能夠快速確認(rèn)在飛行控制律的機載實現(xiàn)中是否存在缺陷,成為當(dāng)前飛控系統(tǒng)快速研發(fā)的趨勢,也是未來飛控系統(tǒng)研發(fā)人員所必須具備的能力。因此,本文從飛控系統(tǒng)快速設(shè)計與驗證的角度出發(fā),運用基于模型的工具,引入飛控計算機、三軸轉(zhuǎn)臺等硬件,構(gòu)建地面半物理仿真實驗系統(tǒng)開展教學(xué)實驗。通過開展飛控系統(tǒng)的半物理仿真驗證教學(xué)實驗[4,5],增強學(xué)生對于飛控系統(tǒng)
開發(fā)與驗證全流程的理解,鍛煉學(xué)生的設(shè)計驗證實踐能力。
二、快速原型技術(shù)與教學(xué)實驗平臺
快速原型技術(shù)是通過將產(chǎn)品研制初期的設(shè)計思想和結(jié)果快速地轉(zhuǎn)換為能夠反映產(chǎn)品主要功能和外觀的三維實體模型,快速地設(shè)計出符合用戶和市場需求的產(chǎn)品。具體到飛控系統(tǒng)研發(fā),設(shè)計人員均采用Simulink對模型進行模塊化、圖形化的建模,在充分驗證模型的正確性后,利用RTW自動生成代碼技術(shù),將Simulink模型生成優(yōu)化的、可移植的代碼,并可以根據(jù)目標(biāo)配置生成硬件環(huán)境下的可執(zhí)行程序,之后借助系統(tǒng)驗證環(huán)境進行半物理仿真驗證[6,7]。
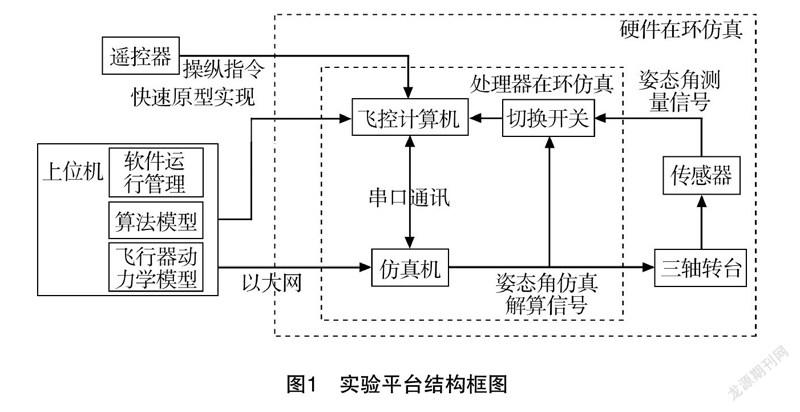
將快速原型技術(shù)應(yīng)用到飛控系統(tǒng)教學(xué)實驗,學(xué)生在數(shù)字仿真驗證后,可快速地將控制器生成實時代碼并加載到飛控計算機中開展后續(xù)的驗證實驗,若出現(xiàn)設(shè)計不完善或者算法設(shè)計不合理的情況,都可以進行快速調(diào)整。半物理仿真實驗平臺結(jié)構(gòu)框圖如圖1所示。
實驗平臺采用“上—下”位機架構(gòu),上位機是1臺Windows主控計算機,進行控制算法模型及飛行器動力學(xué)模型設(shè)計、軟件運行管理和快速代碼生成;下位機由1臺實時仿真機和1個飛控計算機組成;實時仿真機主要負(fù)責(zé)解算飛行器動力學(xué)模型;飛控計算機運行實時生成的控制律模型代碼;三軸轉(zhuǎn)臺模擬飛行器姿態(tài)運動。該半物理仿真平臺可以用于控制系統(tǒng)離散化實驗、機載代碼生成及測試實驗、處理器在環(huán)仿真實驗(PIL)、硬件在環(huán)仿真實驗(HIL)[8]。
三、半物理仿真實驗
在控制律設(shè)計完成后,經(jīng)過了桌面仿真確認(rèn),即可開展半物理仿真實驗。半物理仿真實驗由控制系統(tǒng)離散化、機載代碼生成及測試、處理器在環(huán)、硬件在環(huán)實驗四部分組成。首先需要將桌面仿真時采用的連續(xù)域控制器轉(zhuǎn)化為離散域,同時增加控制器輸入/輸出接口,然后經(jīng)過機載代碼自動生成并進行一致性測試后,加載到飛控計算機中開展處理器在環(huán)仿真實驗,最終應(yīng)用飛行器動力學(xué)模型仿真驅(qū)動三軸轉(zhuǎn)臺,將接通姿態(tài)傳感器的飛控計算機固連于轉(zhuǎn)臺之上開展硬件在環(huán)仿真實驗。實驗中各個步驟依托設(shè)備如下:
控制系統(tǒng)離散化實驗:主控計算機。
代碼生成及測試實驗:主控計算機+飛控計算機。
處理器在環(huán)仿真實驗:主控計算機+目標(biāo)仿真機+飛控板。
硬件在環(huán)仿真實驗:主控計算機+目標(biāo)仿真機+飛控板+三軸轉(zhuǎn)臺。
(一)控制律離散化實驗
在控制系統(tǒng)的純數(shù)字設(shè)計與仿真中,一般應(yīng)用連續(xù)域控制器,但是在半物理仿真中,由于需要將控制算法與硬件相結(jié)合,所以必須將連續(xù)域控制器離散化。z變換是一種用冪級數(shù)表示離散信號的方法[9],是傅里葉變換的推廣,也是拉普拉斯變換的一種變形,是由采樣函數(shù)的拉普拉斯變換經(jīng)由代換(T為采樣周期)而得。在實驗環(huán)節(jié)中,學(xué)生通過對比離散化前后的系統(tǒng)響應(yīng),并以飛控計算機的基本運行方式和涉及的相關(guān)原理為背景,有助于開啟從書本中的控制系統(tǒng)到真實控制系統(tǒng)設(shè)計觀念的轉(zhuǎn)變。
(二)機載代碼生成實驗
控制算法需要通過機載代碼生成并下載到飛控計算機中,與傳統(tǒng)人工編寫代碼相比,機載代碼簡潔方便、節(jié)省時間,但一般需要通過實際處理器的運行結(jié)果對比來驗證代碼實現(xiàn)的功能與原模型一致。本實驗環(huán)節(jié)設(shè)置了滾轉(zhuǎn)、俯仰、油門、偏航四個指令輸入通道來模擬真實遙控器指令輸入。在飛控系統(tǒng)的相同輸入下,對比桌面模型的解算結(jié)果與自動生成的代碼解算結(jié)果,并且通過Matlab/Simulink的Assertion模塊自動判斷兩者輸出是否存在差異,即可完成初步的飛行控制律代碼實現(xiàn)的校驗,確保載入飛控計算機代碼的正確性。此時還應(yīng)強調(diào)根據(jù)飛行管理系統(tǒng)的邏輯關(guān)系進行遍歷,以確保邏輯功能的正常。
(三)處理器在環(huán)實驗
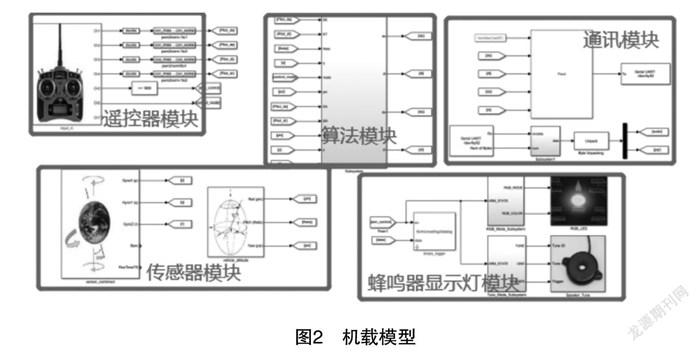
處理器在環(huán)實驗是在機載代碼生成的實驗基礎(chǔ)上,將經(jīng)過驗證的機載代碼裝訂到飛控計算機之中,并且將飛控計算機與模型仿真機實時連接,在模型仿真機輸出的虛擬傳感器信號作用下驗證飛控計算機硬件解算是否與設(shè)計一致。需要注意的是,在本實驗中需要添加硬件接口模型組成最終的實驗導(dǎo)入機載模型。主要包括遙控器模塊、傳感器模塊、通訊模塊、蜂鳴器顯示燈模塊。各模塊之間的信號連接、數(shù)據(jù)類型需要確認(rèn)無誤,最終的機載轉(zhuǎn)代碼模型如圖2所示。其中遙控器模塊和傳感器模塊作為操縱指令輸入和傳感器實測信號輸入;算法模塊是實驗(二)中驗證的控制算法;通訊模塊主要是實現(xiàn)仿真機和飛控計算機之間的雙向信息傳遞,即飛控計算機向仿真機發(fā)送舵面偏轉(zhuǎn)指令,仿真機向飛控計算機回傳由動力學(xué)模型解算的傳感器信號;蜂鳴器顯示燈模塊主要用來監(jiān)測飛控計算機運行狀態(tài),包含代碼加載過程狀態(tài)顯示、加載完成狀態(tài)顯示、飛控是否解鎖狀態(tài)顯示、故障狀態(tài)顯示等。
與機載代碼生成測試實驗相比,處理器在環(huán)實驗中機載模型添加了軟硬件關(guān)系映射及相關(guān)硬件模型,進一步驗證代碼實現(xiàn)的功能。本實驗環(huán)節(jié),機載模型通過快速原型技術(shù)生成實時代碼,加載至在飛控計算機,動力學(xué)模型編譯后下載到仿真機運行,兩者通過串口進行數(shù)據(jù)傳輸實現(xiàn)閉環(huán)仿真。學(xué)生在實驗中可實現(xiàn)飛控計算機引入仿真回路,驗證存在一定通訊延遲的條件下,控制算法在實際飛控計算機中實現(xiàn)的控制功能。
(四)硬件在環(huán)實驗
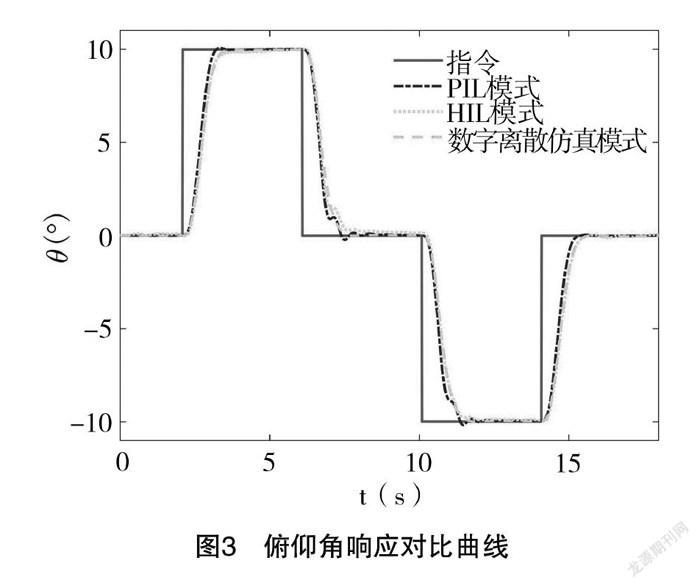
硬件在環(huán)實驗是在處理器在環(huán)實驗的基礎(chǔ)上,加入三軸轉(zhuǎn)臺模擬飛行器姿態(tài)運動,用真實傳感器測量的姿態(tài)角信號代替仿真機模型解算的信號,將轉(zhuǎn)動運動的傳感器特性納入實驗考察的對象之中,這也是工程中經(jīng)常應(yīng)用的地面測試手段之一。實驗中引入實際傳感器和三軸轉(zhuǎn)臺,同時帶來了時間延遲、偏差、死區(qū)等系統(tǒng)真實特征,能夠使學(xué)生具有更加真實的研發(fā)體驗。若將實驗結(jié)果與處理器在環(huán)結(jié)果、數(shù)字離散仿真結(jié)果進行對比,學(xué)生可以分析圖3中的示例曲線,盡管三種模式的仿真結(jié)果相似,但是與數(shù)字離散仿真結(jié)果相比,PIL和HIL模式響應(yīng)超調(diào)量微增。這樣能夠更加直觀地向?qū)W生解釋半物理仿真中接入了網(wǎng)絡(luò)通信、轉(zhuǎn)臺、傳感器等實物,帶來了附加的延遲、死區(qū)等非線性動力學(xué)特征的影響。同時,HIL模式仿真結(jié)果顯示,轉(zhuǎn)臺靜態(tài)條件下傳感器測量的俯仰角存在小幅初始偏差,這也是MEMS傳感器所反映的真實特性。
總之,通過本實驗可以更加真實地模擬飛控系統(tǒng)在真實環(huán)境下的使用特征,讓學(xué)生身臨其境地體驗到飛控系統(tǒng)的運行環(huán)境,加深學(xué)生對于真實設(shè)計中存在的延遲、偏差等影響因素的認(rèn)知。
四、結(jié)語
設(shè)計開發(fā)了飛控系統(tǒng)半物理仿真實驗,主要包含飛控律連續(xù)域-離散域轉(zhuǎn)換實驗、機載代碼生成及測試實驗、處理器在環(huán)實驗、硬件在環(huán)實驗等。提升了飛控系統(tǒng)設(shè)計教學(xué)的生動性,激發(fā)了學(xué)生的學(xué)習(xí)興趣。通過飛行器控制律模型測試修改、硬件系統(tǒng)調(diào)試、結(jié)果分析等過程,有利于加深學(xué)生對飛行控制器設(shè)計—實現(xiàn)—驗證整個過程的認(rèn)識,提升學(xué)生實踐和綜合解決問題的能力,還可以將本系統(tǒng)用于微小型飛行器設(shè)計研發(fā),支持學(xué)生高效開展課外科技活動。
參考文獻(xiàn)
[1]廖新濤.基于快速原型的無人機仿真技術(shù)研究[D].南京:南京航空航天大學(xué),2015.
[2]田傳艷,胡軍照,劉繼奎,等.一種低成本的半實物飛行仿真系統(tǒng)[J].系統(tǒng)仿真學(xué)報,2019,31(6):1123-1127.
[3]曹澤玲.小型無人機制導(dǎo)與控制半物理仿真系統(tǒng)研究與設(shè)計[D].南昌:南昌航空大學(xué),2018.
[4]陳聰,金洋,王軒,等.飛機系統(tǒng)虛擬仿真實踐教學(xué)平臺開發(fā)[J].實驗室研究與探索,2017,36(4):83-86.
[5]羅喜霜,宋亮,雷瑋,等.基于模型的預(yù)警無人機飛控系統(tǒng)開發(fā)與驗證[J].計算機測量與控制,2017,25(12):283-287.
[6]韓本剛,毛師彬.基于xPC目標(biāo)的無人機半物理仿真系統(tǒng)設(shè)計與實現(xiàn)[J].彈箭與制導(dǎo)學(xué)報,2019,39(2):15-19.
[7]辛國柏,盧京潮,閆建國.一種小型無人機半物理仿真系統(tǒng)實現(xiàn)[J].計算機仿真,2008(6):66-69.
[8]方振平,陳萬春,張曙光.航空飛行器飛行動力學(xué)[M].北京:北京航空航天大學(xué)出版社,2005:174-180.
[9]周小玲,于育民,王其如.關(guān)于z變換的研究及其在解差分方程中的應(yīng)用[J].數(shù)學(xué)的實踐與認(rèn)識,2010,40(14):183-189.
Exploration on Teaching Experiments of Semi-physical Simulation of Flight Control System
TANG Peng, ZHANG Wen-tao, LIU Xiao-feng
(School of Transportation Science and Engineering, Beihang University, Beijing 100191, China)
Abstract: The teaching experiment of flight control is mainly based on Matlab/Simulink modeling and simulation. The traditional design method of manual coding controller software faces the problems of difficult teaching and complex debugging process. Based on rapid prototype technology, hardware devices such as three-axis turntable and flight control computer are introduced to design the semi-physical simulation teaching experiments. The results show that the teaching experiments can help students understand the differences between the mathematical simulation and actual flight, such as the delay of control command, the interference of sensor characteristics, the discrete domain and continuous domain, and understand the aircraft attitude motion and ground experiment methods, which is conducive to improving students’ practical ability and comprehensive problem-solving ability.
Key words: flight control system; model-based; semi-physical simulation; teaching experiments
3450501908260
