雙電機兩擋驅動系統協同控制策略研究
2021-03-22 04:26:32何洪文曹劍飛
重慶理工大學學報(自然科學) 2021年2期
何洪文,韓 陌,曹劍飛,石 曼
(北京理工大學 機械與車輛學院,北京 100081)
1 研究現狀
當前,環境和能源危機對車輛的能耗和排放提出了更高的要求[1-2]。能耗經濟性是純電動商用車輛重要的性能評價指標[3]。兩擋變速箱能有效提升驅動系統的動力性能和經濟性能[4]。在滿足車輛動力性能需求的條件下,基于雙電機的效率數據,合理分配雙電機工作點及制定合理的換擋規律是降低能耗的有效解決方案。根據離線全局尋優方法獲得的驅動系統控制策略為瞬態最優策略。為解決該瞬態最優策略在測試工況中頻繁換擋的問題,采用具有工況適應性的實時換擋規律和轉矩分配策略是必要的。
對于雙電機驅動系統,Li等[5]提出了一種面向能耗的純電動汽車雙電機動力系統控制策略,根據能耗經濟性優先的原則將動力系統劃分為4種工作模式,在每個模式下全局離線尋優,得到能耗最低的轉矩和轉速分配策略,并在爬坡和急加速工況下設計轉矩補償,以滿足動力性需求。該策略較單電機驅動系統能夠提升車輛的續駛里程。
對于兩擋變速系統,Hu等[6]針對能耗經濟性、動力性、換擋沖擊度等性能指標分別提出了換擋控制策略。出于對能耗經濟性的考慮,Li等[7]提出了一種面向能耗的純電動汽車兩擋變速系統控制策略,基于l-k曲線制定了最佳動力性換擋策略,基于電機效率Map圖制定了最佳經濟性換擋策略,并同時考慮動力性和經濟性的綜合性能換擋規律,采用交叉粒子群算法對綜合性能換擋規律進行優化求解。出于對動力學的考慮,Mousavi等[8]提出了一種無動力中斷的兩擋變速系統,在對其進行動力學分析的基礎上,利用龐特里亞金最小化原理優化控制策略。該策略可以有效消除換擋時的沖擊振動和動力中斷。
對于新能源車輛換擋頻繁的問題,研究者提出了一些方法來調節換擋規律。Liu等[9-11]中針對純電動4擋機械室自動變速器,在經濟性雙參數換擋規律的基礎上,設計了同時考慮車輛質量和道路坡度的多參數換擋策略,但這種方法犧牲了部分經濟性能。吳進軍等[12]針對插電式混合動力汽車,提出了一種次優能量管理策略,采用引入隨機過程[13-15]的隨機動態規劃算法,將換擋頻繁問題作為約束條件,但這種方法優化過程復雜,實時性能有待驗證。
綜上,現有的控制策略僅適合于雙電機先進行轉矩耦合而后經過變速箱的構型。本文中所采用的構型中,變速箱位于轉矩耦合之前。對于這種構型,應同時考慮扭矩分配策略和變速規律。同時,控制策略還需考慮兩電機的峰值轉速等性能參數對車輛性能的影響。另外,由于瞬態優化結果沒有考慮系統動態響應的結果,在工況測試中具有換擋頻繁的問題,影響系統的使用壽命及乘坐感受。考慮經濟性能和換擋頻率的優化問題研究也尚不完善。本文中針對某新型雙電機驅動系統,提出一種雙電機變速箱工況適應性協同控制策略,并在Matlab/Simulink環境下驗證該協同控制策略的能耗經濟性。
2 雙電機兩擋驅動系統構型
雙電機變速箱驅動系統由驅動電機、作業電機、兩擋變速箱與行星排組成,如圖1所示。驅動系統的2個輸入軸分別是2個電機的輸出軸;驅動系統的輸出軸連接在行星排的齒圈上。另外,作業電機的輸出軸通過作業裝置離合器與作業裝置連接。行星架可由鎖止機構固定在驅動系統殼體上或與殼體分離,作業電機經過惰輪與太陽輪連接,經由行星架固定的行星齒輪將轉矩加載在齒圈上。因而,作業電機到驅動系統輸出軸的減速比是固定的,即行星排在該結構下的傳動比。驅動電機經過兩擋變速箱將轉矩加載在齒圈上。

圖1 雙電機變速箱驅動系統結構示意圖
本文中車輛屬于工程作業車輛,其工作模式有作業和非作業兩種。初始默認為非作業模式,即鎖止機構默認鎖止。當車輛有作業需求時,鎖止機構分離,作業電機離合器接合,作業電機僅用于驅動作業裝置工作,驅動電機單獨驅動車輛行駛。當作業完成,鎖止機構鎖止,作業電機重新參與輔助驅動車輛行駛。本文中主要研究非作業模式下雙電機耦合驅動控制策略,即鎖止機構處于鎖止狀態。
限于該驅動系統的設計初衷,作業電機只在非作業模式時作為輔助電機參與驅動車輛行駛,不用于獨自驅動車輛行駛。作業電機在參數匹配時,考慮的是同時滿足作業與輔助驅動的功率需求,因而其性能參數不適于絕大多數工況下獨自驅動車輛行駛。這一限制也減少了因頻繁進行模式切換帶來的機械構件磨損與模式切換沖擊對舒適性的影響。因此,非作業模式中,驅動系統提供驅動力的方式只有2種:僅由驅動電機提供驅動力的單電機驅動方式;由驅動電機與作業電機同時提供驅動力的雙電機驅動方式。
從硬件條件的角度分析,該構型的結構與電機性能參數決定了高速時(60~100 km/h)采用單電機驅動方式。在該構型中,2個電機的輸出轉矩在齒圈上進行轉矩耦合,兩電機的轉速始終與車速耦合。因此,為滿足車輛最高車速達到100 km/h的動力性指標,需要核算2個電機的最高轉速指標能否達到要求。經過計算,作業電機的峰值轉速對應車速為59.45 km/h,驅動電機的峰值轉速對應車速為101.6 km/h。因此,當車速在60~100 km/h范圍內時,作業電機將超負荷運轉,對電機性能損害較大。因此在高速工況,作業電機的輸出軸連同惰輪、太陽輪和行星輪空轉,采用僅由驅動電機提供驅動力的單電機驅動方式。
由于2種驅動方式都有驅動電機參與,而驅動電機經過兩擋變速箱將轉矩傳遞到齒圈,因此需對所有工況制定換擋規律,并對雙電機驅動方式制定轉矩分配策略。
3 驅動系統經濟性控制策略
基于某新型雙電機變速箱驅動系統,制定兩擋變速系統的換擋規律與雙電機耦合驅動轉矩分配策略,提升驅動系統效率,提高車輛的能耗經濟性。圖2為雙電機變速箱協同控制策略流程。

圖2 協同控制策略流程框圖
基于本文中新型雙電機變速箱驅動系統構型特點和2個電機的性能參數,將全部工況的驅動方式劃分為2種:僅驅動電機提供驅動力的單電機驅動方式、驅動電機與作業電機同時提供驅動力的雙電機驅動方式。
3.1 離線計算能耗經濟性最優轉矩分配表和驅動系統效率表
根據前文論述,對于0~60 km/h范圍內的工作點有條件采用雙電機驅動方式。需要得到2個擋位下的能耗經濟性最優的2張轉矩分配表及2張驅動系統效率表,用于后續步驟查表使用。對于2個擋位,根據電機驅動效率Map圖,以驅動系統效率最優為目標,分別通過全局離線尋優方法得到2個擋位下的2張轉矩分配表,用于制定換擋規律時選擇擋位查表使用。獲得2張驅動系統效率表,用于已知工作點、擋位情況下獲得雙電機轉矩分配數值時查表使用。
對于0~60 km/h范圍內的工作點,驅動電機與作業電機在分別經過變速箱與行星排后在齒圈進行轉矩耦合。對于任何一個工作點,即對于任何給定的踏板開度和車速,首先可以確定傳動系統輸出軸的轉速。而位于傳動系統輸出軸處的需求轉矩則因擋位而異,不能確定。因而,需要先確定該工作點的擋位。而擋位的確定需要對比2個擋位在相同工作點的驅動系統效率高低。在任意工作點,2個擋位下各自的能耗經濟性最優轉矩分配表及其驅動系統效率是可以率先離線獲得的。因此,本節對于2個擋位不考慮換擋,分別計算得到各擋位下滿足驅動系統效率最優的轉矩分配表。轉矩分配表以驅動系統輸出軸轉速為x軸坐標,以驅動系統輸出軸的需求轉矩為y軸坐標,以驅動電機的輸出轉矩作為z軸坐標。該轉矩分配表表示在該擋位下滿足能耗經濟性最優的轉矩分配比例。
在2個擋位下分別對驅動電機的輸出轉矩進行全局離線尋優。在變速箱的每個擋位,對于車速0~60 km/h范圍內,加速踏板開度0-1范圍內的工作點:以驅動電機轉速變化100 r/min為轉速間隔,對應計算固定間隔下的每個驅動系統輸出軸轉速,從而計算作業電機的對應轉速;以該擋位下驅動系統輸出軸需求轉矩變化10 N·m為間隔,構成需要計算的全部的驅動系統工作點。對每個工作點,以驅動系統效率最高為目標,以1 N·m為間隔不斷改變驅動電機輸出轉矩,計算對應的作業電機的輸出轉矩,從而根據2個電機各自的驅動效率Map圖計算該擋位時驅動系統在工作點的驅動系統效率。由此尋優得到該工作點的使驅動系統效率最高的驅動電機輸出轉矩值。將全部工作點的尋優結果列表,得到各擋位下能耗經濟性最優的轉矩分配表。
在對每個工作點尋優時,以能耗經濟性為目標建立的優化模型為:

式中:η為驅動系統效率;Td為輸出軸(差速器輸入端)轉矩(N·m);n1為輸出軸轉速(r/min);T1、T2分別為驅動電機和作業電機的輸出轉矩(N·m);n1、n2分別為驅動電機和作業電機的輸出轉速(r/min);η1、η2分別為驅動電機和作業電機在各自轉速、輸出轉矩的效率。對于2個電機的輸出轉矩符號相反的情況,設為不可行約束條件。
基于Matlab進行仿真運算,得到2個擋位的2張轉矩分配表(圖3、4)。2張驅動系統效率表如圖5、6所示。

圖3 變速箱1擋時的驅動電機輸出轉矩
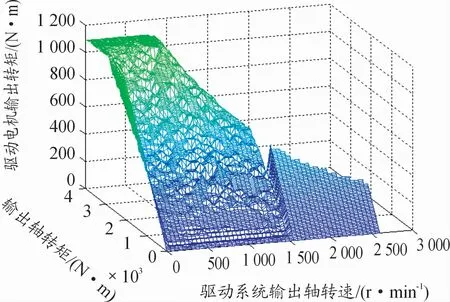
圖4 變速箱2擋時的驅動電機輸出轉矩
在圖5、6中,驅動系統的效率為兩電機和包括變速箱、行星排在內的傳動機構組成的驅動系統的效率。對于每個擋位,驅動系統效率最高均可達到91%以上。經過計算,圖6右側顯示了車速在60~100 km/h范圍內工作點的驅動系統效率。
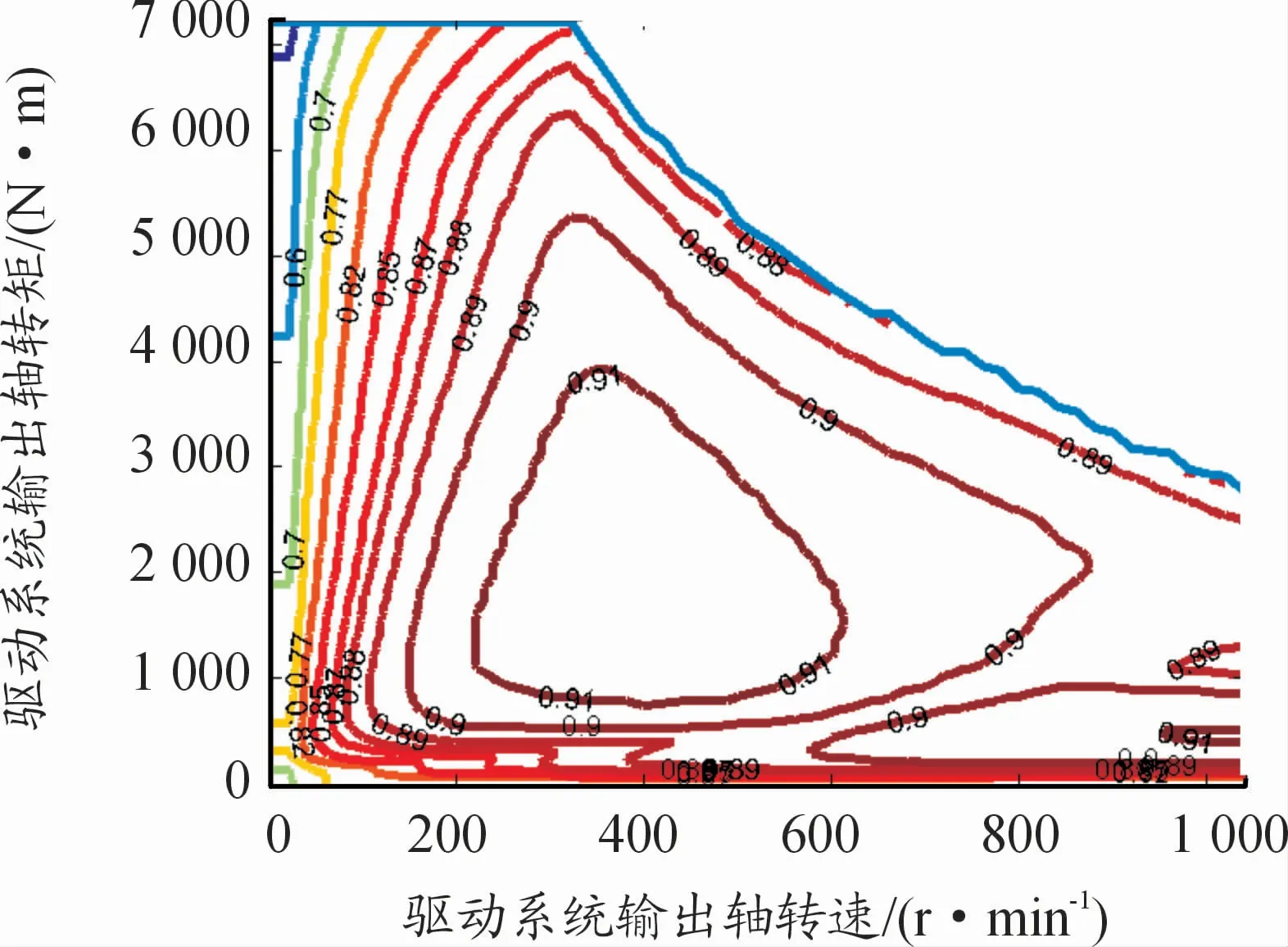
圖5 變速箱1擋時驅動系統效率
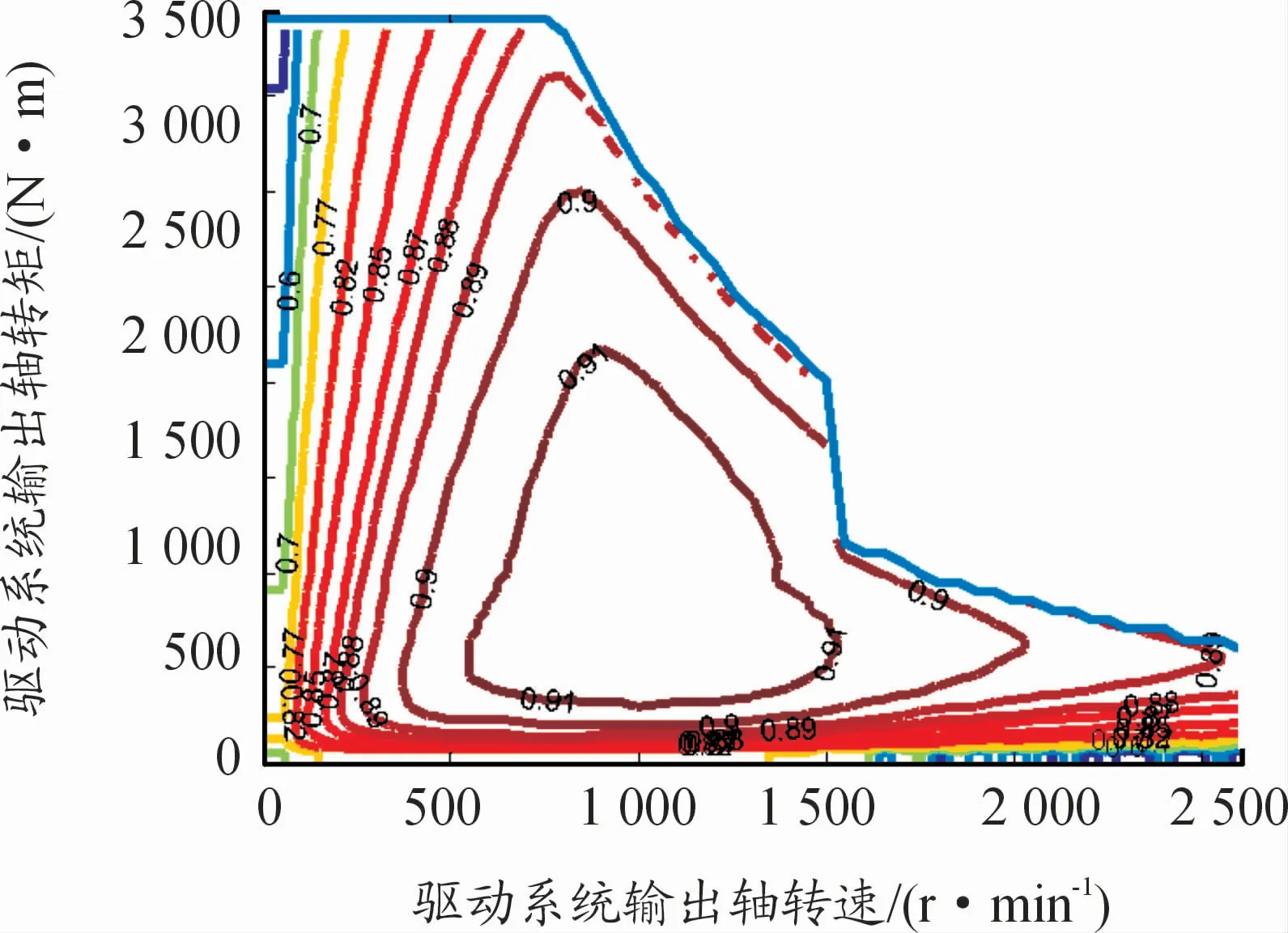
圖6 變速箱2擋時驅動系統效率
3.2 雙參數經濟性換擋策略
對于全部工作點(0~100 km/h)都有驅動電機參與驅動車輛行駛,需要確定各個工作點的擋位。對于驅動系統的每個工作點,根據2個擋位的能耗經濟性最優轉矩分配下的2張驅動系統效率表,查表對比相同工作點2個擋位驅動系統效率值,選擇使驅動系統更高效的擋位。得到的選擇結果列表形成2個擋位的分界線,再加入考慮動力性能的降擋線,即為雙參數經濟性換擋規律。
雙參數經濟性換擋規律具有較好的經濟性,且在工程實際中比較容易實現。對于全部車速范圍內(0~100 km/h)的工作點,都有驅動電機參與驅動,因此需要面向所有工作點分析制定換擋規律。
首先,根據車速的全部范圍和2個擋位的驅動系統外特性范圍,將驅動系統全部工作點劃分為4個區域:雙電機低速大轉矩區、雙電機高轉速區、雙電機可換擋區和單電機高轉速區(60~100 km/h),如圖7所示。

圖7 驅動系統工作點區域劃分曲線
如圖7所示,在車速60~100 km/h范圍內的工作點,只能采用驅動電機單獨驅動方式,且只有2擋可以達到轉速要求。在其他區域均采用雙電機驅動方式。由驅動系統外特性容易得出:在雙電機低速大轉矩區,需要采用1擋;在雙電機高轉速區,需要采用2擋;在雙電機可換擋區,2個擋位都可滿足車輛的行駛需求,需要制定換擋規律。由步驟2獲得2個擋位各自的驅動系統效率表后,可以根據經濟性需求制定換擋策略。
如圖8所示,根據2個擋位的驅動系統效率表,在雙電機可換擋區的任一工作點選擇高效的擋位。所有工作點選擇擋位后,2個擋位的邊界(即2個擋位效率相等的工作點)連線得到雙參數經濟性換擋規律的升擋線。
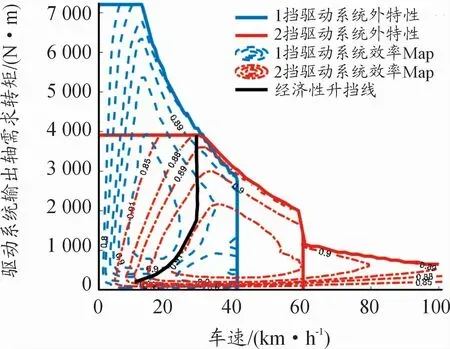
圖8 兩擋位驅動系統效率
為防止車輛在踏板開度和車速變化時頻繁換擋,降擋線和升擋線間需要有一定的速度延遲。降擋線設計原則為:①降擋速度低于升擋速度4~8 km/h;②升、降擋速度差隨踏板開度增加而增加。將雙電機可換擋區的需求轉矩對應到加速踏板開度,得到雙參數經濟性換擋規律。如圖9所示,從換擋規律結果來看,隨著油門開度加大,換擋點車速向高速區間移動,因而也具有較好的動力性能。

圖9 雙參數經濟性換擋規律
3.3 雙電機變速箱協同控制策略
0~60 km/h范圍內的工作點,對于任意車速和加速踏板開度,根據換擋規律,可以判斷應選擇的擋位,然后計算驅動系統輸出軸的需求轉矩。根據車速可以計算得到驅動系統輸出軸的轉速。根據驅動系統輸出軸轉速、需求轉矩和擋位,由該擋位的能耗經濟性最優轉矩分配表得到驅動電機的輸出轉矩。60~100 km/h范圍內的工作點,與上述步驟類似,對于任意車速和加速踏板開度,根據換擋規律判斷應選擇的擋位,然后確定驅動電機的輸出轉矩。將所有工作點的轉矩分配匯總,得到雙電機變速箱驅動系統協同控制策略。最終得到的驅動系統效率Map圖如圖10所示,雙電機轉矩分配策略如圖11所示。

圖10 驅動系統效率Map圖

圖11 轉矩分配策略
4 控制策略工況適應性優化
以瞬態能耗經濟性為優化目標獲得的換擋規律未考慮換擋過程中動力中斷、換擋機構磨損等問題,而在實際使用中,頻繁的換擋是不可行的。針對該問題,工況適應性控制策略對于不同的測試工況在線辨識工況特征參數,實時調整變速箱換擋及雙電機轉矩分配策略,解決瞬態最優控制策略下的換擋頻繁問題。控制策略的工況適應性優化需要首先完成工況特征及換擋規律統計分析。
4.1 工況特征及換擋規律統計分析
5種典型的重型商用車測試工況包括重型商用車輛瞬態車輛循環(C-WTVC)、城市道路循環(UDDS)、WVUSUB循環工況、WVUCITY循環工況和中國標準城市工況(ChinaCity)。工況整體的特征參數見表1。
換擋頻率指單位時間換擋次數。根據駕駛習慣,定義換擋頻率為0.2次/s及以上,即5 s之內連續換擋2次及以上的情況為換擋頻繁。5個工況下的換擋情況統計結果見表2。

表1 典型循環工況特征參數

表2 瞬態經濟性最優策略下換擋情況統計
由表2可知:5種工況下,瞬態經濟性最優策略都或多或少地存在換擋頻繁問題。以C-WTVC工況為例,車速跟隨及換擋情況的仿真結果如圖12所示。
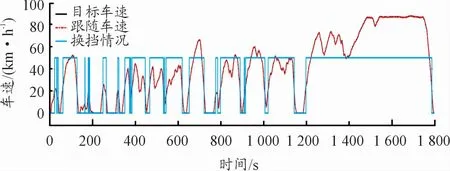
圖12 C-WTVC循環工況下的車速跟隨及換擋曲線
在5種循環工況下,對換擋頻繁的工作點進行統計,結果如圖13所示。換擋頻繁點主要分布于踏板開度絕對值在0.4以下的區域,且車速越低,換擋頻繁點越密集。同時可以發現,在車速低于15 km/h且踏板開度在±0.2以內的區域,換擋頻繁的比例很高。在這一區域,升擋線和降擋線距離很近;踏板開度越接近零,升擋和降擋的界限越模糊且接近。因而,在上述出現換擋頻繁點的區域內,換擋規律需要調整。
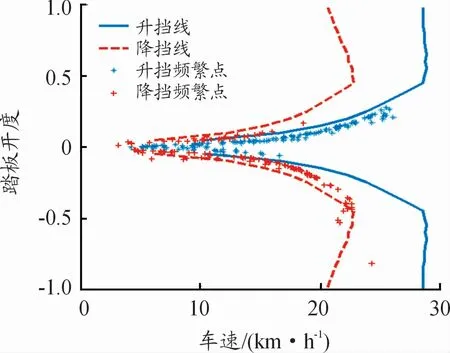
圖13 5種工況下換擋頻繁點的分布
4.2 工況特征在線識別
在換擋規律中,踏板開度可以等效為驅動系統需求轉矩,如圖8所示。當工況中的工作點處于易發生頻繁換擋的區域,判斷相鄰2次換擋指令的時間間隔。若時間間隔小于或等于5 s,即開始實時調整換擋規律參數。
4.3 驅動系統控制策略參數實時優化
瞬態經濟性最優控制策略中,隨著車速降低和踏板開度降低,升擋線和降擋線越來越接近,從而導致換擋行為頻繁發生。因而,未出現換擋頻繁問題時,基于經濟性換擋規律進行換擋;出現換擋頻繁問題時,實時調整換擋規律參數,將升擋線向右平移不超過4~8 km/h,或將降擋線向左平移不超過4~8 km/h,從而增加升、降擋線的距離,規避換擋頻繁問題。動態調整換擋規律后的仿真結果如圖14所示。同樣在C-WTVC循環工況中,不再出現頻繁換擋的情況。
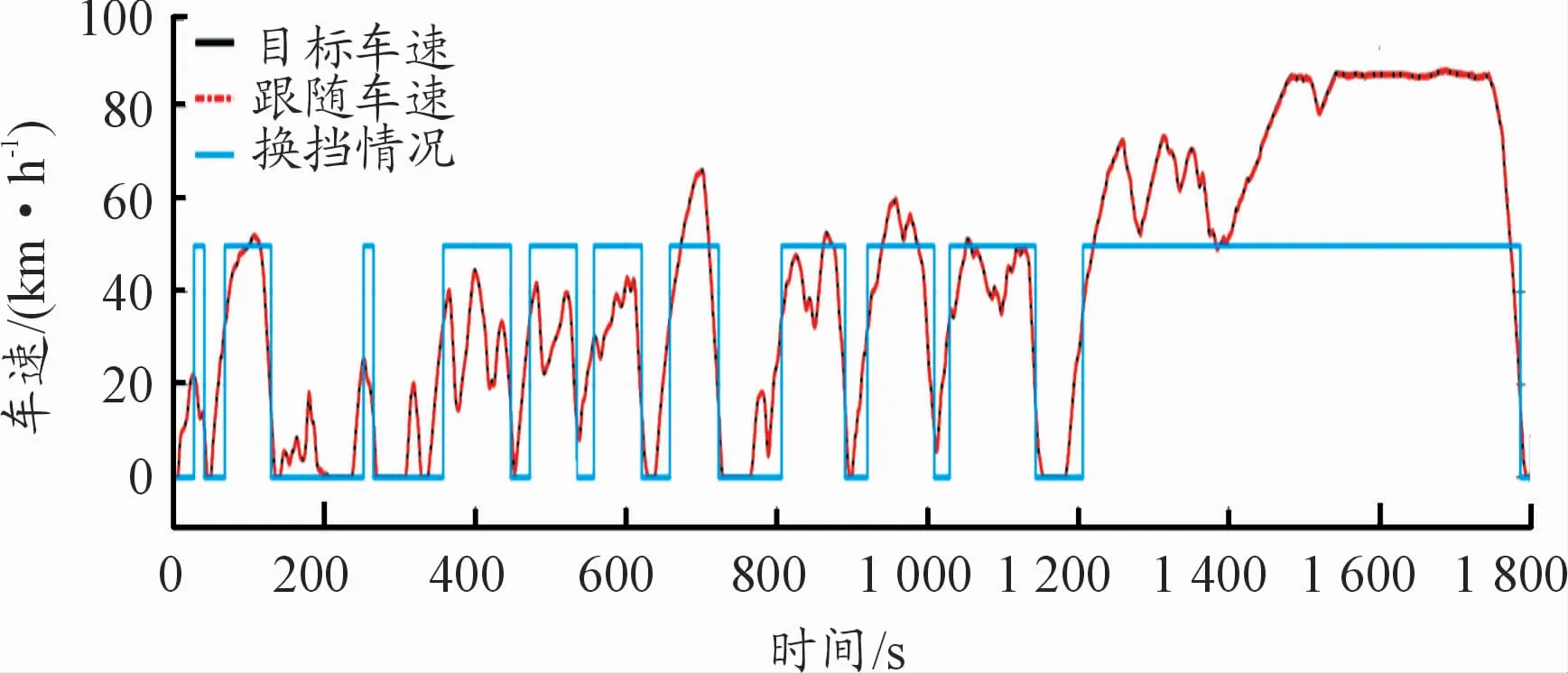
圖14 工況適應性控制策略下C-WTVC工況的車速跟隨和換擋曲線
由圖14可見:經過換擋規律實時調整后的換擋頻率明顯降低。在工況適應性控制策略下,5種工況的換擋情況統計見表3。對比表2、3可以發現,5個工況的最小換擋間隔大幅提升,頻繁換擋的次數顯著降低。

表3 工況適應性控制策略下5種工況的換擋情況
5 仿真結果與討論
基于Matlab/Simulink搭建雙電機兩擋變速箱傳動系統及車輛2自由度動力學仿真模型。以CWTVC工況為例,驗證瞬態經濟性最優策略和工況適應性控制策略的能耗經濟性。2種控制策略下,驅動系統的功率變化曲線如圖15所示。

圖15 2種控制策略的驅動系統功率
采用瞬態經濟性最優策略,換擋規律根據工程經驗推導而來,即升擋線和降擋線是固定的。此時,車輛的百公里電耗為65.72 kW·h。
采用工況適應性控制策略,升擋線和降擋線基于經濟性換擋規律實時變化。此時,車輛的百公里電耗為63.14 kW·h,較瞬態經濟性最優策略降低3.9%。
在瞬態經濟性最優策略中,升擋線與降擋線是固定的,降擋線是由基于經濟性換擋規律根據經驗數值推演得到,因此在換擋時不一定采用效率最高的擋位。考慮控制策略在應用中的換擋頻率問題,提出工況特征參數在線辨識方法,實時調整換擋規律,大幅減少甚至避免換擋頻繁問題的出現。同時,以經濟性換擋規律為基準,在除換擋頻繁以外的時刻,使車輛都能在效率更高的擋位行駛。
6 結論
針對某新型雙電機驅動系統,提出一種瞬態經濟性最優雙電機變速箱協同控制策略。對于2個擋位,基于電機驅動效率Map圖,分別通過全局離線尋優的方式獲得各自擋位下的轉矩分配表和驅動系統效率表;通過對比相同工作點2個擋位的驅動系統效率,得到能耗經濟性最優的換擋規律,再根據轉矩分配表查表得到轉矩分配策略,即雙電機變速箱協同控制策略。在此基礎上,對5種特征工況下的換擋效果進行分析,提出改進換擋頻繁問題的方法,在線識別工況特征參數,并實時調整換擋規律。將瞬態經濟性最優控制策略和工況適應性策略應用在Matlab/Simulink運動學模型中,驗證2種控制策略的可行性和能耗經濟性。根據仿真驗證結果,在C-WTVC工況下,采用工況適應性控制策略時百公里電耗為63.14 kW·h,較瞬態經濟性最優控制策略降低了3.9%。同時,工況適應性控制策略有效減少甚至避免了換擋頻繁問題。
猜你喜歡
房地產導刊(2022年4期)2022-04-19 09:04:10
汽車工程師(2021年12期)2022-01-17 02:29:58
能源工程(2020年6期)2021-01-26 00:55:22
甘肅教育(2020年14期)2020-09-11 07:57:42
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
四川電力技術(2015年5期)2015-12-19 11:04:54
減速頂與調速技術(2015年4期)2015-03-16 03:39:41
時代英語·高二(2015年1期)2015-03-16 00:08:11