
工業機器人超聲波傳感器避障算法設計與優化研究
2021-03-22 16:36:05孫濤
電腦知識與技術 2021年4期
孫濤

摘要:超聲波傳感器具有成本低、精度高、運算快、避障算法設計簡單的特點,在工業機器人避障、路徑規劃領域表現出良好的前景。文章以超聲波避障算法為基本原理,探討其在工業機器人領域的應用價值、算法設計及優化方向,以便于改善現有技術在避障設計中的缺點,使工業機器人更好地服務于工業企業的生產需要。
關鍵詞:工業機器人;超聲波傳感器;避障算法
中圖分類號: TP311? ? ? 文獻標識碼:A
文章編號:1009-3044(2021)04-0175-02
工業機器人發展至今已有近70年的歷史,在其搭載人工智能、計算機技術的背景下,其智能性、易用性的優勢凸顯,而自主發展、人機協作正成為工業機器人領域的發展趨勢之一[1-2]。隨著物流、電子、工業生產領域的技術革新、新舊動能轉換,在工業機器人移動時實現高效、高精度的避障,是工業機器人行業轉型升級、產業化應用的關鍵,其避障性能也是衡量工業機器人實用性的指標[3]。目前以模糊邏輯控制、人工勢場法為代表的避障算法,在工業機器人運行中扮演者至關重要的角色,但該類技術僅適用于簡單環境下的避障,對于多障礙環境、復雜工況的避障效果欠佳,存在中途停頓、擺動等問題通病。與之相比,超聲波傳感器方法在避障中,能夠為機器人提供開闊的視野、障礙物信息,給工業機器人避障策略的設計提供了新的研究思路和方向。
1 超聲波傳感器避障的原理
超聲波傳感器由壓電晶片組成,是基于超聲波波長短、頻率高、傳播定向、繞射頻率低的特性設計的傳感器,因具有較大的機電耦合系數,輸出能量大,工作中有著較高的靈敏度,可以適合高負荷條件下的傳感器運行需要。縱向振蕩為基礎的超聲波技術應用,能夠在固體、液體、氣體不同環境中傳播,傳播效率也存在明顯的差異,但無論是在液體、固體中的高頻率傳輸,還是在空氣中的低頻率傳輸,都伴隨著衰減現象,針對超聲波的這一特性,在工業機器人行進過程中,可以運用超聲波測距模塊,實時測量其和障礙物間的距離,在設定的安全范圍內,機器人可以自動進行障礙物的規避[4]。該避障方法是在時間差測距法的基礎上經演化、實踐形成的,即按照空氣中超聲波在單位時間內的移動時間、距離,測算超聲波在空氣中從發射器發出信號,至接收器收到回波的距離,運算公式為:
S=Tυ
在表達式中:
S代表超聲波在空氣中的移動路程;T代表超聲波在移動時所耗費的時間;υ代表空氣中超聲波在單位時間內的移動距離。
超聲波傳感器在工業機器人行走中的障礙物檢測方式為持續探測,參照常見的超聲波傳感器模塊,檢測誤差一般在4%內,因此利用超聲波傳感器避障,可以獲得良好的避障效果。
2 工業機器人超聲波傳感器避障算法與流程設計
基于超聲波傳感器避障的原理,在工業機器人避障設計中,以聲速、時間、障礙物距離的關系為基礎,三者的表達式可表示如下[5]:
S=1/2ct
在上述表達式中,C代表聲速;
S表示工業機器人和障礙物之間的距離;T表示發射脈沖時刻與首個回波達到時刻的時間差。
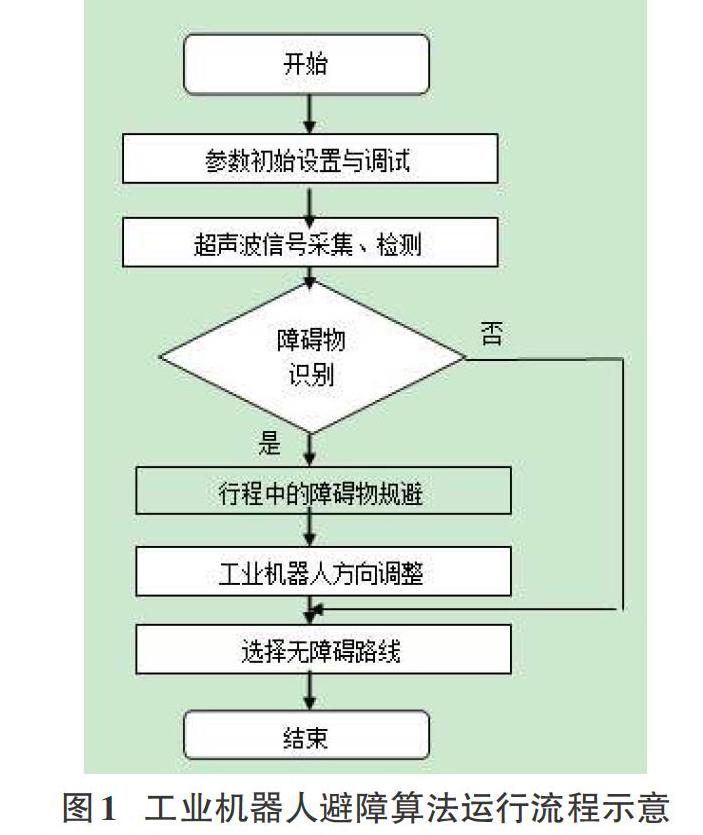
依據上述避障公式、超聲波測距原理,采用MATLAB平臺中的Line函數,FIS模糊推理系統編輯器,整合工業機器人障礙物信息獲取、檢測、處理、模糊推理過程,建立簡易的模型,減少建模過程對機器人自身力學模型的依賴性。借助模糊推理、控制,加強避障算法在應用中的精度,便于進行機器人左、右、前方各個方位障礙物的識別與控制。以設計的超聲波避障算法為例,確定了工業機器人的主要運行流程:
圖1流程圖中,工業機器人工作時,首先,依據工業生產、機器人的功能定位需求,進行參數初始化設置,調試機器人的避障參數,使工業機器人在安全距離內及時選擇無障礙路線。之后,利用超聲波傳感器,采集機器人周邊的聲波信號,檢測工業機器人和障礙物間的距離,聯合模糊推理方法,對障礙物進行預判,按照機器人所處位置,推薦可靠的行進路線,生成探測結果,再將數據傳輸至工業機器人配置的顯示屏,可顯示不同方位的障礙物信息、距離檢測結果。接著,在遭遇障礙物的條件下,機器人可以避開障礙,旋轉90°繼續選擇安全的行程。若機器人判斷預定的行走路線無障礙物時,可以直接選擇對應方位的路線,完成規定的任務。
3 工業機器人超聲波傳感器避障算法優化策略
考慮到基礎的超聲波傳感器算法在短距離內測距精度缺陷問題,通過延遲電路時間,來控制避障過程中的超聲波測距精度,優化后的避障算法表達式為:
△t=s1t1-s2t2/s2-s1
上述表達式中:
s1、s2表示已知測量距離;△t表示延遲時間;t1、t2表示對應的測量時間。
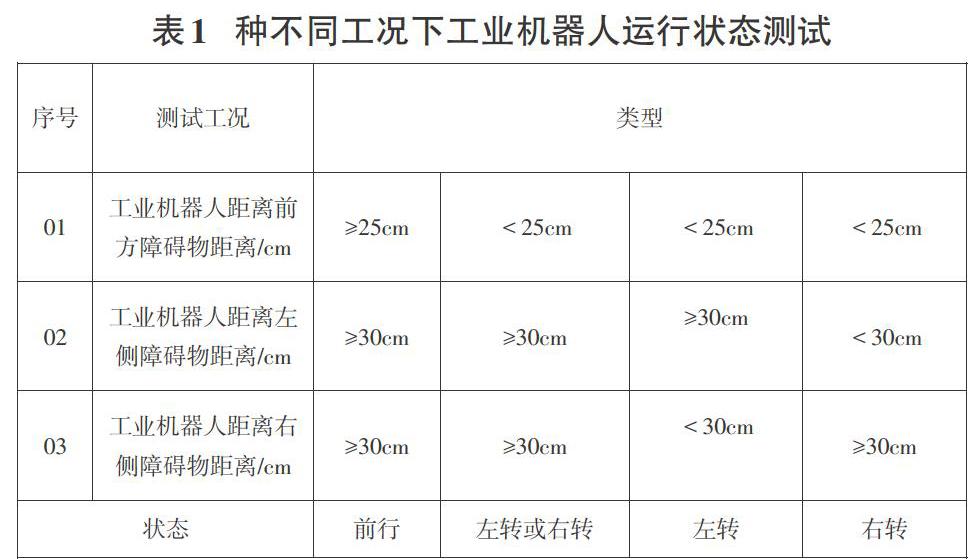
根據優化后的超聲波避障算法,對工業機器人和障礙物間的距離參數進行分析和設定,共計包含前方障礙物、左側障礙物、右側障礙物3個指標[16]。采用超聲波傳感器探測各部位信息,要求工業機器人前方行走時,當障礙物距離工業機器人的距離≥25cm,則視為安全路線,機器人可繼續行走。隨著與障礙物距離的拉進,當障礙物距離<25cm時,探測工業機器人左側、右側的障礙物信息,當識別到左側、右側的距離到機器人均≥30cm時,可以向左側或者右側旋轉90°后行進。若探測到左右兩側的安全距離均<25cm時,工業機器人可后退一段距離,當有一側的距離≥25cm,則可向該方向行走,直到選擇最佳的無障礙路線為止。
4 超聲波傳感器避障算法驗證
為驗證超聲波傳感器避障算法的精度與可靠性,采用XX公司生產的AIR3工業機器人和XX公司生產的200F18TR-2超聲波傳感器為試驗工具。其中,工業機器人為6軸,最大運動范圍560mm,定位精度±0.02mm,6個軸的運動范圍分別為:-170°/+170°、-110°/+120°、-110°/+155°、-200°/+200°、-120°/+120°、-350°/+350°,6個軸的運動速度分別為450°/s、450°/s、540°/s、800°/s、800°/s、800°/s。超聲波傳感器的標稱頻率為200.0±10%KHz,測量范圍為0.07-0.8M,標準檢測板為100x100mm,輸出方式為NPN/PNP/0-10V/4-20mA。以工業機器人現行的工作速度為依據,使其向障礙物方向行進,測量工業機器人和障礙物間的最小距離,分別在前方障礙物、左側障礙物、右側障礙物3種不同的工況條件下,測試工業機器人的運行狀態:
經過不同工況下的工業機器人運行狀態測試,發現超聲波傳感器避障算法在避障中,對于工業機器人的運行環境有固定要求,機器人行走過程需保證路面平整、光滑,無坑槽、凹凸不平現象,方可按照設定的參數進行避障處理,一旦路面出現坑槽,則會影響超聲波傳感器的測量精度,機器人的行走也可能存在一定的概率偏離原有的路線。另外,超聲波傳感器量程內對稍遠距離的障礙物,有著較好的測量效果,而對于近距離的障礙物可能存在檢測盲區,但得益于測試中模糊推理策略的應用,可以增強超聲波傳感器識別障礙物的能力,提升其應對障礙物的反應能力,減少了探測誤差,這也有效指導了工業機器人的正常運行,但模糊推理策略對于近距離的超聲波傳感器探測精度有限。
5 結語
文章運用超聲波傳感器設計了工業機器人避障算法,建立了工業機器人避障流程,確定了障礙物到工業機器人間的安全距離控制閥值,測距的靈敏度、精度高,可以適用于一般環境下的工業機器人簡單作業,對于復雜工況,尤其是動態障礙物的避障處理及近距離的避障設計,超聲波傳感器避障算法還存在著本身的劣勢,將超聲波避障算法與遺傳算法、人工智能技術等結合進行算法優化,是工業機器人超聲波避障未來一項重要的命題。
參考文獻:
[1] Takei Y,Matsui R,Minh-Dung N,et al.Velocity measurement using MEMS ultrasonic sensor for non-invasive blood pressure measurement[J].IEEJ Transactions on Sensors and Micromachines, 2018,138(2):54-58.
[2] AlMohimeed I,Ono Y.Ultrasound measurement of skeletal muscle contractile parameters using flexible and wearable single-element ultrasonic sensor[J].Sensors, 2020,20(13):3616.
[3] 華丹.基于區塊鏈技術的工業機器人視覺檢測及避障系統設計[J].計算機測量與控制,2020,28(7):69-73.
[4] 于燕.智能機器人的超聲波避障技術研發及應用[J].南方農機,2019,50(21):263.
[5] 吳翩卉,盧杜曉,羅忠輝,等.智能機器人的超聲波避障技術研發及應用[J].機床與液壓,2019,47(9):46-50,57.
【通聯編輯:李雅琪】
