蔬菜穴盤苗移栽自動取苗技術現狀與分析
2021-03-23 09:17:42文永雙張俊雄譚豫之
中國農業大學學報 2021年4期
文永雙 張俊雄 袁 挺 譚豫之
(中國農業大學 工學院,北京 100083)
我國是蔬菜生產和消費大國, 2018年蔬菜種植面積達20 438.9 khm2,產量7.03 億t,人均占有量0.5 t,均居世界之首[1]。穴盤育苗技術和穴盤苗的機械化移栽對促進我國蔬菜產業的發展具有重要意義。蔬菜機械化移栽與傳統手工移栽相比具有以下優勢:1)顯著提高移栽效率,保證作物在最佳移栽期內移栽;2)降低人工勞動強度和生產成本;3)提高移栽質量,提升蔬菜產量和品質;4)為移栽后的除草、施藥、澆水和收獲等環節的機械化提供便利[2-4]。
目前,我國蔬菜移栽以人工移栽和半自動移栽為主,半自動移栽對穴盤苗適應能力強,但需要人工進行取苗、喂苗,移栽機僅完成自動栽植動作[5]。人工取苗存在以下缺點:1)機器在前進過程中由于機身晃動、送苗裝置轉動等,人工取苗、投苗不方便;2)人手直接作用于柔嫩的幼苗時,由于穴盤苗缽體與穴盤的黏結性,易造成幼苗莖葉斷裂,導致傷苗率高;3)人工成本高,效率低,當移栽機行走速度較高時,會出現人工取苗、投苗不及時,增大漏苗率;4)工人工作一段時間后,易出現疲勞、眩暈,加重漏栽、傷苗等情況的發生。隨著蔬菜需求量的不斷上升,勞動力的短缺及工廠化育苗技術的發展,極大促進了穴盤苗全自動移栽機的發展[6]。全自動移栽機在半自動移栽機的基礎上增加了自動供苗、取苗、送苗和收盤等機構,各機構共同完成蔬菜穴盤苗的自動移栽作業,移栽效率是半自動移栽的2~4倍。
自動取苗是將缽苗從穴盤中取出、輸送并投入到送苗裝置或栽植器內,取苗機構性能好壞直接決定自動移栽機的定植質量、效率和穩定性[7-9]。對自動取苗技術研究現狀進行分析,有利于使自動移栽領域的應用人員和研究人員更快速和系統地了解國內外自動取苗技術,合理選取和設計自動取苗機構。本研究擬對當前蔬菜自動取苗技術進行分類梳理與歸納,并對我國自動取苗技術面臨的問題和應對措施進行總結,以期為相關人員快速系統了解自動取苗技術,把握取苗技術的發展方向提供參考。
1 自動取苗技術的分類分析
1.1 頂出式、頂夾結合式取苗
頂出式、頂夾結合式取苗利用頂桿穿過穴盤底部的排水口,將穴盤苗從穴盤頂入接苗機構或輸送帶,接苗機構夾持缽體,并移送至栽植機構,或輸送帶將穴盤苗有序輸送到栽植機構[10]。該取苗方式只需頂桿作直線往復移動即可將穴盤苗頂出,具有動作簡單、取苗效率高、傷苗率低的特點。利用缽苗盤根由上向下逐漸稠密的缽苗特性[8, 11],頂桿直接作用在根系密集的缽體底部,因此對缽體盤根效果和頂桿直徑有一定要求,如果缽體不緊實或頂桿過細,則頂桿易刺入苗缽,造成缽體損傷或取苗失敗[12]。
1.1.1凸輪式頂苗機構
凸輪式頂苗機構送盤底板下側背面安裝帶有一排頂桿的頂桿支架,頂桿間距與穴盤苗的株距相同,凸輪驅動頂桿支架沿導軌方向頂出,再由兩側復位彈簧推回,在供苗底板前下方設有接苗機構[13-14]。頂桿將整排缽苗從穴盤頂入前方的接苗機構,接苗機構繞定軸旋轉至豎直狀態,穴盤苗落入正下方分苗機構的承接筒內(圖1[13])。為避免凸輪機構與其他機構發生干涉,劉大慶等[15]設計了一種凸輪柔索式蔬菜穴盤苗頂出機構,凸輪機構驅動鋼絲繩一端,鋼絲繩另一端拉動取苗頂桿,彈簧驅動頂桿頂出,凸輪柔索機構驅動頂桿收回,鋼絲繩傳動實現凸輪機構與頂桿機構分離。
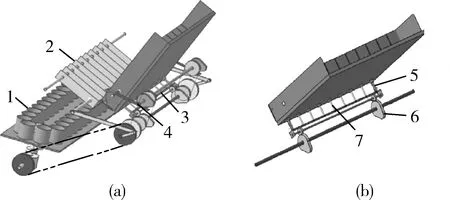
1.分苗機構;2.接苗機構;3.頂苗機構;4.供苗機構;5.彈簧;6.凸輪;7.頂桿1. Seeding separation mechanism; 2. Seeding carry mechanism; 3. Seedling ejecting mechanism; 4. Feeding mechanism; 5. Spring; 6. Cam; 7. Mandrel圖1 取送苗機構(a)和凸輪頂苗機構(b)結構Fig.1 Seedling pick-up mechanism (a) and cam ejecting seedling mechanism (b)
1.1.2曲柄滑塊式頂苗機構
曲柄滑塊式自動取苗機構利用曲柄滑塊機構驅動頂桿將穴盤苗頂出[16-18],由接苗機械手夾取、移送頂出的穴盤苗并進行投苗,其動作可分解為供苗、頂苗、送苗和投苗,金鑫等[17]等設計了頂夾式取苗機構(圖2),通過運動建模、仿真和精度綜合分析等方法,優選出最佳取苗參數:曲柄頂苗機構初始相位角φd=108°,曲柄長度a=78 mm,連桿長度b=112 mm,偏距e=20 mm,頂苗曲柄轉速范圍10~30 r/min。以番茄穴盤苗為取苗對象,該自動取苗機構取苗效率可達140 株/min,取苗成功率超過95%。
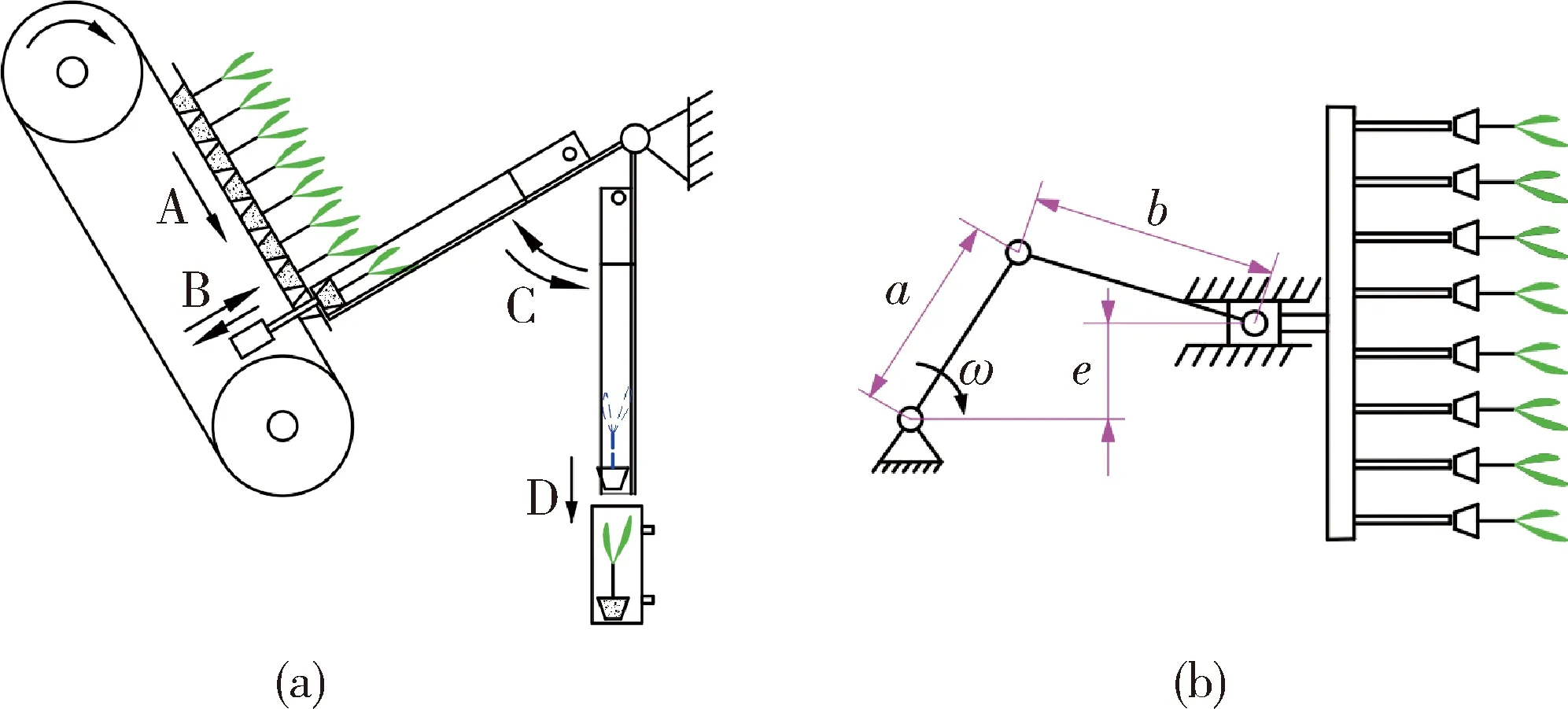
A,B,C,D分別表示供苗、頂苗、送苗、投苗動作。a為曲柄長度;b為連桿長度;e為滑塊移動導路中心線與曲柄回轉中心之間的偏置;ω為曲柄角速度。A, B, C and D are the operations of sending trays, ejecting seedlings, sending seedlings, and throwing seedlings, respectively.a is crank length; b is connecting rod length; e is eccentricity; ω is crank angular velocity.圖2 取苗機構(a)和曲柄頂苗機構(b)結構圖及取苗過程原理Fig.2 Seedling pick-up mechanism (a) and crank ejection mechanism (b) and seedling process
1.1.3伺服推桿式頂苗機構
楊傳華[19]等采用高速伺服電動缸驅動頂桿進行取苗,伺服電動缸具有結構緊湊、運動速度快、易控制等特點,簡化了機械傳動系統。電動缸驅動的頂苗機構可實現頂桿精準的推出和退回,為防止缽體破損和提高取苗效率,伺服電動缸采取慢速推出穴盤苗,快速退回的方式。該自動取苗機構可降低秧苗移栽的損傷率,有利于快速緩苗,對番茄穴盤苗進行取苗試驗,取苗成功率達90%以上。
1.1.4氣動式頂苗機構
氣動式頂苗機構采用氣缸作為動力元件,驅動頂桿將整排穴盤苗頂出,由穴盤苗前方的機械手將整排穴盤苗轉送至輸送帶,輸送帶再將穴盤苗送至栽植機構[20-22],類似機型的生產廠家有意大利Ferrari公司、法國Picador公司、英國Pearson公司等。韓長杰等[20]設計了硬質穴盤苗自動取苗機構,由橫向移位氣缸驅動穴盤卡盤架沿直線導桿橫向移動,縱向移位氣缸驅動穴盤實現縱向移動,由氣缸驅動的頂桿將穴盤中的穴盤苗推出至接苗板,翻轉氣缸驅動接苗板至豎直位置時進行投苗,取苗速度為72株/min,頂出可靠率達100%。
1.1.5頂桿與射流組合式取苗
高捷等[23]采用頂桿與射流組合式取苗,推桿頂入缽腔,打破穴盤與缽體之間的粘結力,利用氣流非接觸取苗。但此種取苗方式僅適于盤根效果好的穴盤苗,且功耗較大。Shaw[24]先利用高壓氣流松脫苗缽,再利用頂桿將穴盤苗頂出(圖3),頂桿末端設有若干斜向前方的噴嘴,取苗時噴嘴靠近缽體并噴射高壓氣體使缽體與缽腔分離,再用頂桿將穴盤苗頂出。試驗證明,取苗成功率從不使用氣流輔助沖擊的65%提高到95%。
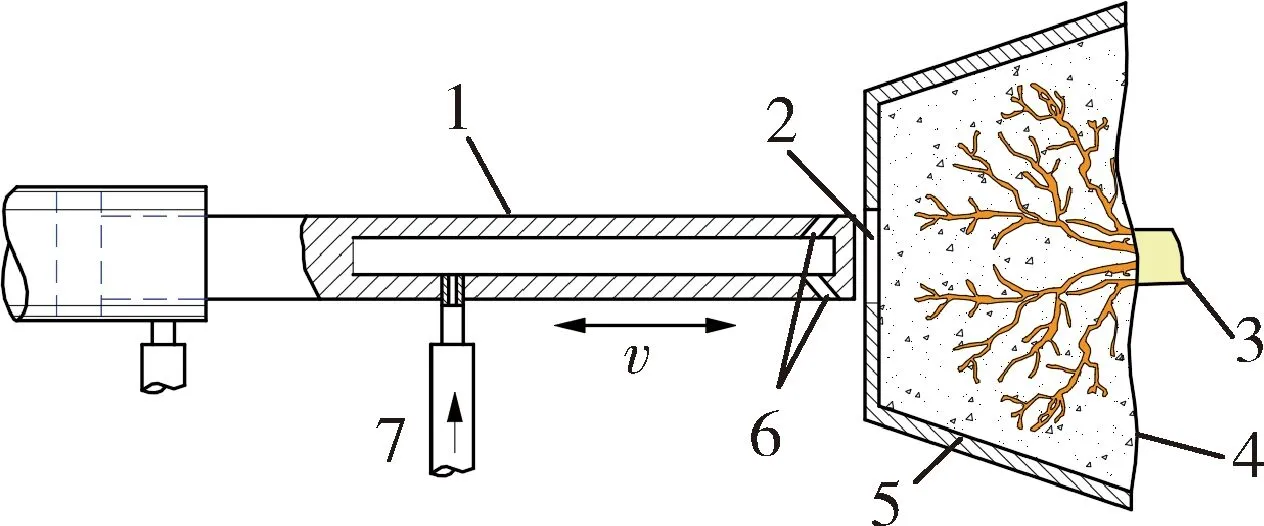
v為頂桿運動方向。1.頂桿;2.穴盤底孔;3.穴盤苗;4.缽體;5.穴盤;6.噴嘴;7.進氣口。v is the moving direction of the mandrel.1.Mandrel; 2.Tray hole; 3.Plug seedling; 4.Plug body; 5.Tray; 6.Nozzle; 7.Air inlet port.圖3 頂桿與射流組合式取苗結構Fig.3 Piston and jet combination type pick-up mechanism
1.2 指鉗式取苗
指鉗式取苗可分為插入夾持式和直接夾持式。1)插入夾持式取苗末端執行器利用1對或多個取苗針插入并夾緊缽苗缽體,在自動取苗機構的帶動下將穴盤苗從穴盤取出,移送至送苗機構或栽植機構正上方,取苗針松開并推出缽苗,完成1次取苗[25-27](圖4(a)[28])。該取苗方式利用缽體的基質-根系復合特性[29-32],成功率高、送苗過程可靠,應用廣泛,但在取苗針在插入、夾持和移動缽苗過程中,取苗針可能破壞莖葉或缽體、刺穿莖葉,特別是對于西蘭花、甘藍等展幅較大的葉菜類穴盤苗。另外,插入式自動取苗機構對取苗針運動軌跡、取苗和投苗的位姿有較高要求,送苗穩定性還需進一步研究。2)直接夾持式取苗機構利用末端執行器的機械手指夾持缽苗莖部進行取苗、投苗[33-36],如寧津金利達機械有限公司生產的田耐爾自動秧苗移栽機夾莖式取苗機械手(圖4(b))。由于穴盤苗展寬、莖粗、苗高以及苗在缽腔的生長位置都具有隨機性,缽體與穴盤具有一定粘結力,機械手在夾持拔拉過程中易造成秧苗莖葉損傷,使穴盤苗移栽后的緩苗期增長,所以,夾莖式取苗適合直立度較好、莖部粗壯的缽苗,如番茄、辣椒等。

圖4 插入夾持式(a)和直接夾持式(b)取苗末端Fig.4 Insert clamping type (a) and direct clamping type (b) manipulator
1.2.1滑道式取苗機構
以滑道機構作為取苗運動軌跡的取苗機構,可完成復雜的取苗和輸送動作,但存在取苗效率低、機構振動和沖擊較大、滑道磨損導致取苗精度下降等問題[38-43]。Choi等[38]研發了多桿機構驅動的滑道式自動取苗機構,由固定滑道、曲柄(驅動桿)、連桿、搖桿和滑塊等組成(圖5(a)),取苗針安裝在滑塊上,搖桿和滑道控制取苗針的位置和姿態。取苗裝置由2個取苗針、2個推苗環、活塞桿和導向板組成。取苗針固定在導向板上,活塞桿在兩導向板之間往復移動,使取苗針插入夾緊缽體或放松推出缽體(圖5(b)),取苗效率為30 株/min,取苗成功率為97%。李華等[44]設計了行星輪系驅動的滑道式自動取苗機構,取苗效率為62 株/min,移栽合格率為93.4%。胡敏娟等[45]設計了不完全齒輪齒條驅動的滑道式自動取苗機構,取苗效率為80 株/min,成功率為80.4%。
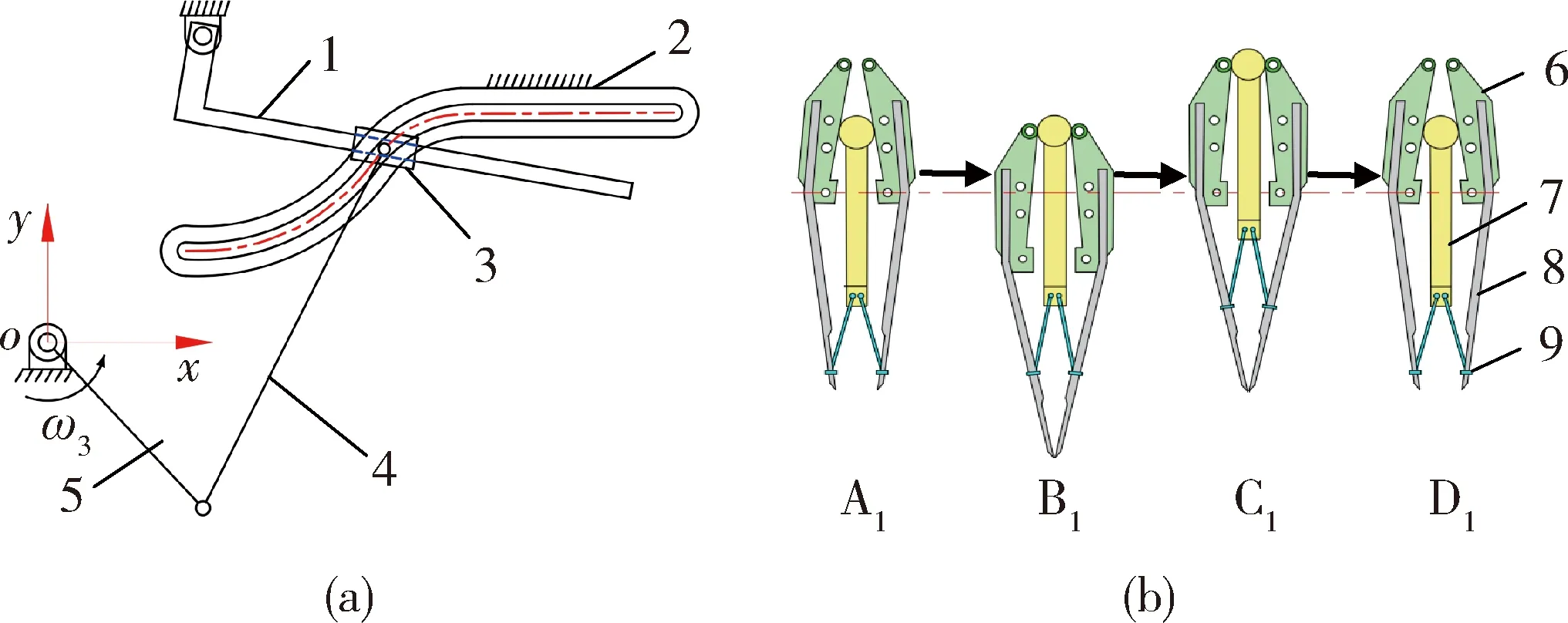
ω3為曲柄角速度。A1,B1,C1,D1分別為準備、夾苗、提苗、推苗過程。1.搖桿;2.滑道;3.滑塊;4.連桿;5.曲柄;6.導向板;7.活塞桿;8.取苗針;9.推環。ω3 is crank angular velocity. A1, B1, C1 and D1 are the preparation, clamping, lifting, and pushing states, respectively.1.Rocker; 2.Slideway; 3.Slider; 4.Connecting rod; 5.Crank; 6.Guide plate; 7.Piston rod;8.Plug seedling picking-up needle; 9.Push ring.圖5 滑道式取苗機構結構簡圖(a)和機械手取苗過程(b)Fig.5 Chute type seedling mechanism (a) and manipulator pick-up seedling process (b)
1.2.2直線滑臺式取苗機構
直線滑臺式取苗機構由多個滑臺組合而成,驅動取苗機械手完成預定軌跡[46-50]。韓綠化等[46]研發了溫室穴盤苗自動移栽機,采用直角坐標式移動滑臺來驅動兩指四針鉗夾式末端取苗執行器完成取苗和送苗,步進電機驅動輸送裝置進行間歇供苗(圖6(a))。取苗末端執行器主要由微型氣缸、彈簧、橡膠氣囊、叉形夾取針等組成,利用橡膠氣囊和外圍收緊彈簧撐開和收緊兩根氣缸機械手指,橡膠氣囊和彈簧均具有一定柔性,該機械手依據缽苗物理力學特性進行設計,以減輕取苗過程對缽苗的損傷(圖6(b)),以西蘭花、辣椒、番茄、黃瓜穴盤苗為移栽對象進行取苗試驗,取苗成功率大于90%。Ryu, K H[51]、Feng等[52]研制的直線滑臺式氣動取苗機構,利用機器視覺技術對整盤穴盤苗進行監測,取苗機械手只抓取正常穴盤苗進行移栽。
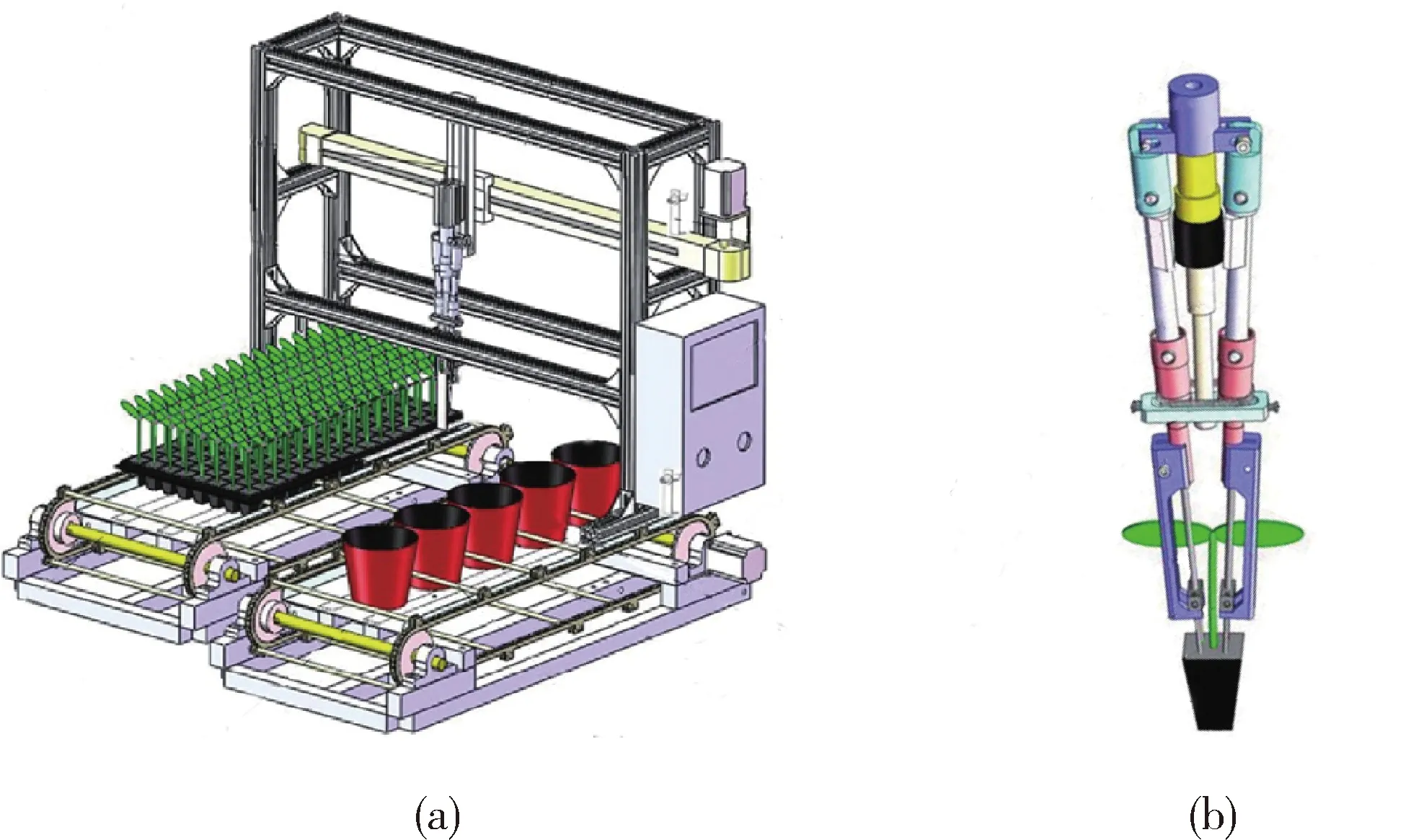
圖6 直線滑臺式取苗機構(a)和取苗末端執行器(b)Fig.6 Linear slide table type seedling mechanism (a) and seedling manipulator (b)
1.2.3旋轉升降式取苗機構
旋轉升降式取苗機構的機械手固定在可旋轉和升降的機架上,機械手活動范圍為一圓柱體內。嚴霄月等[53]借鑒日本井關PVHR2型旋轉托杯式半自動移栽機,設計了一種“一”型旋轉升降式取苗機構的全自動移栽機(圖7(a))。凸輪驅動裝置驅動取苗執行器取苗和投苗,以黃瓜穴盤苗為移栽對象,實現整排取苗間隔投苗功能。旋轉升降機構用于協助取苗末端執行器完成下降夾苗、上升、順時針轉90°至投苗位置投苗、逆時針轉90°回到取苗位置一系列動作。以黃瓜苗為取苗對象,當自動取苗機構取苗效率為90株/min時,取苗成功率為75%,當取苗效率為60 株/min時、取苗成功率可達95%。另外,張俊雄等[54]提出了“十”型旋轉升降式取苗機構(圖7(b)),宋琦等[55]提出了“口”型旋轉升降式雙排取苗機構,均通過減少空行程使取苗效率進一步提高。
圖7 “一”型(a)和“十”型(b)旋轉升降式取苗機構結構Fig.7 “一” type (a) and “十” type (b) rotary lifting type seedling pick-up mechanism structure
1.2.4多桿驅動式取苗機構
多桿驅動式取苗采用平面多桿機構驅動取苗機械手來實現自動取苗[56-60]。曲柄為主動桿,通過連桿帶動搖桿擺動,取苗針固定在連桿上,多桿機構驅動取苗針插入并夾緊穴盤苗缽體,穴盤苗隨連桿移動,當穴盤苗到達投苗口的正上方時,排苗桿將穴盤苗撥下,穴盤苗豎直落入栽植機構中,完成一次取苗(圖8(a)[56])。謝守勇等[61]設計了斜插式夾持式取投苗裝置(圖8(b)),由雙曲柄多桿機構驅動取苗機械手完成取投苗,主動桿轉速為12 r/min,苗盤傾斜角度為45°時,取投苗效果最佳,此時基質破碎率為3.13%,取投苗成功率為94.44%。
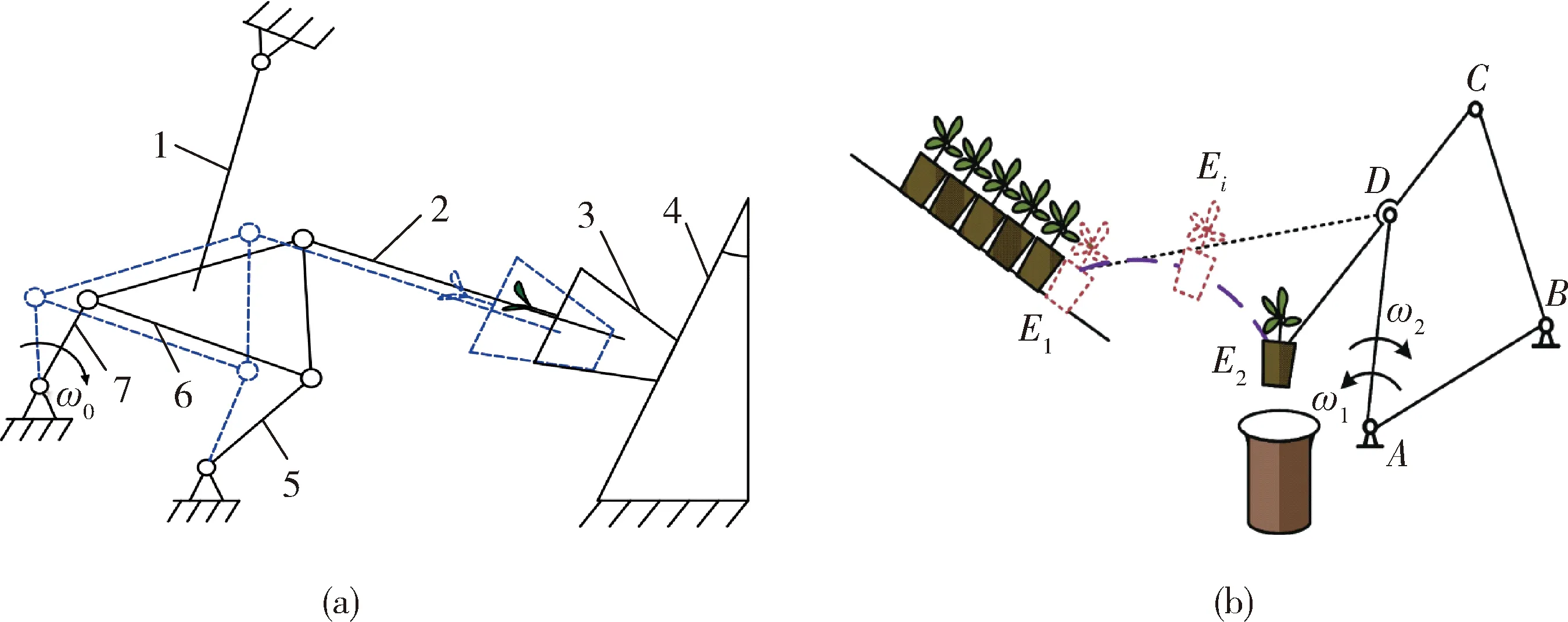
1.排苗桿;2.苗指;3.缽苗;4.支架;5.搖桿;6.連桿;7.曲柄。AB為機架;AD為主動桿;BC為從動桿。D為鉸接點;E1為取苗點;E2為投苗點;Ei為取投苗過程中的任意一點。ω0為曲柄角速度;ω1為向取苗點運動時主動桿角速度;ω2為向投苗點運動時主動桿角速度。1. Seedling pushing rod; 2. Seedling finger; 3. Plug seedling; 4. Rack; 5. Rocker; 6. Connecting rod; 7.Crank.AB is the frame; AD is the active rod; BC is the driven rod. D is the hinge point; E1 is the seedling pick-up point;E2 is the seedling injection point; Ei is any point in the process of pick-up seedlings.ω0 is the crank angular velocity; ω1 is the angular velocity of the active rod when theseedling clamping mechanism moves to the seedling pick-up point; ω2 is the angular velocityof the active rod when the seedling clamping mechanism moves to the seedling throwing point.圖8 曲柄搖桿式(a)和雙搖桿式(b)多桿自動取苗原理Fig.8 Crank rocker type (a) and double rocker type (b) multi-rod automatic seedling pick-up mechanism schematic diagram
1.2.5旋轉行星系式取苗機構
旋轉式行星系式自動取苗機構將橢圓齒輪機構或偏心齒輪-非圓齒輪機構和非圓齒輪機構進行組合,是一類新型高速自動取苗機構,行星輪系自動取苗機構每旋轉1周可進行2次取投苗,實現高速取苗[62-71],但旋轉式行星系取苗臂為高速平面復合運行,具有較大的慣性力。葉秉良等[72]設計了偏心齒輪-非圓齒輪行星系自動取苗機構(圖9),并對該取苗機構進行運動學和動力學特性分析,優選出最佳的參數組合方案。

P為取苗針尖;B—A—C—D為取苗軌跡;D—E—B為空回程軌跡。P is the tip of seedling actuator; B-A-C-D is the seedling pick-up trajectory; D-E-B is the empty return trajectory.圖9 偏心齒輪-非圓齒輪行星系取苗(a)和取苗末端結構圖(b)Fig.9 Seedling pick-up mechanism of planetary gear train with eccentric gear and non-circular gear (a) and seedling manipulator structure (b)
1.3 直落式取苗
空氣整根營養缽育苗相對于普通穴盤育苗,可顯著提高蔬菜產量,空氣整根營養缽的缽腔為底大上小的錐臺體,只能采用缽苗從穴盤直接落下的取苗方式。取苗時,穴盤苗以豎直姿態從穴盤脫落,直接落入送苗裝置或栽植機構。直落式取苗可分為機械下壓式、負壓式、氣吹式等,其機構布置較靈活,易于實現自動有序取苗,可同時完成取苗和投苗[73],缺點是需要定制特殊穴盤,穴盤苗在下落過程中容易對幼苗莖葉造成損傷,該取苗方式只適合生長均勻,且幼苗展寬小于穴盤缽腔尺寸的穴盤苗。
1.3.1機械下壓式取苗
馬旭等[74]研制了機械下壓式空氣整根穴盤苗自動取苗機構,撥指套沿順時針方向轉動,當撥指套與杠桿右端接觸時,杠桿右端上升左端下降,杠桿左端將投秧爪架壓下,安裝在投秧爪架上的投秧爪將穴盤苗壓下,完成投苗,雙導柱起導向作用,投苗結束后回位彈簧將投苗抓架拉回,等待下一周期取苗(圖10)。
1.3.2負壓式取苗
負壓式取苗利用電磁鐵或氣缸驅動的活塞產生真空度進行取苗,由真空筒、導苗管、電磁鐵、活門等組成。當穴盤苗到達投苗口時,電磁鐵帶動真空筒內的活塞移動使與真空筒連通的導苗管內形成負壓,外部大氣壓使導苗管的活門關閉,當導苗管內的真空度增大到一定值時,穴盤苗在大氣壓力和自身重力的作用下落入導苗管,此時導苗管內的氣壓與大氣壓相等,活塞門張開,完成取苗[75-77]。
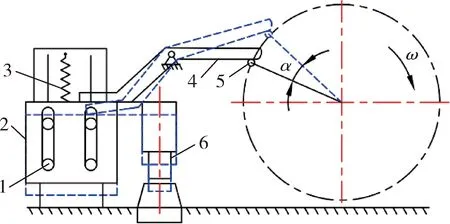
α為壓苗角;ω為轉盤角速度。1.導柱;2.投秧爪架;3.回位彈簧;4.杠桿;5.撥指套;6.投秧爪。α is the seedling pressure angle;ω is the angular velocity of the turntable.1.Guide pillar; 2.Frame for throwing seedling claw; 3.Returnspring; 4.Lever; 5.Driving lever sleeve; 6.Throwing seedling claw.圖10 機械下壓式取苗原理Fig.10 Mechanical pressure type pick-up mechanism schematic diagram
孫廷琮等[78]設計了負壓水流式取苗裝置,利用風機在投苗管內產生負壓,穴盤苗在負壓、水流沖擊和穴盤苗重力的聯合作用下,落入投苗管內,完成取苗。Huang[79]設計了可采用水流噴射下壓取苗的可拆卸苗盤,利用高壓水流進行取苗,取苗效率高,但移栽機長時間工作時需攜帶大量水,結構較復雜。
1.3.3氣吹式取苗和氣缸推出式取苗
王蒙蒙[73]根據下壓式取苗方案的原理,提出氣吹式取苗和氣缸推出式取苗2種取苗方案(圖11),通過實驗對比,氣吹式取苗對秧苗傷害小,但對缽體傷害大,僅適用于根系發達的穴盤苗,并且氣吹式取苗動力消耗大,吹氣時有噪音。氣缸推出式取苗相對于氣吹式取苗,動力消耗小,對缽體傷害較小,對作物種類適應性強,但容易對穴盤苗的莖葉造成損傷。
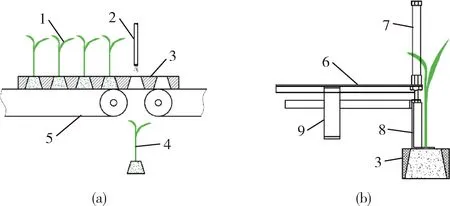
1.待取穴盤苗;2.噴嘴;3.穴盤;4.穴盤苗;5.輸送帶;6.機架;7.氣缸;8.頂桿;9.J形導軌1. Plug seedling for picking-up; 2. Nozzle; 3. Tray; 4. Plug seedling; 5. Conveyer belt; 6. Frame; 7. Air cylinder; 8. Mandril; 9. J-shaped guide圖11 氣吹式取苗(a)和氣缸推出式取苗(b)方案Fig.11 Air blowing type (a) and cylinder push type (b) seedling pick-up mechanism
通過對各自動取苗機構進行對比分析,頂出式、頂夾式取苗機械結構簡單緊湊,取苗效率高,不易傷苗;指鉗式取苗性能穩定、適應性強;直落式取苗機構布置靈活,可同時完成取苗和投苗,但需特制的穴盤,僅適合小苗移栽(表1)。

表1 主要取苗方式優缺點Table 1 The advantages and disadvantages of the main method of seedling pick-up mechanism
2 自動取苗技術面臨的問題與應對措施
2.1 存在的主要問題
2.1.1制缽、育苗、取苗等環節不匹配
穴盤苗自動移栽是一個系統工程,它需要以下設備:制缽設備、播種設備、育苗管理設備、穴盤苗運輸設備和移栽設備等[80]。過去幾十年里,我國蔬菜生產各環節相互分離,自成體系,如中國穴盤一般采用聚苯乙烯、聚氯乙烯加工制成,屬于軟質穴盤,難以實現高精度定位。穴盤穴數已實現標準化,但缽腔大小、深度及底孔尺寸缺乏統一標準,造成穴盤種類繁多,缽體也多種多樣,不利于工廠化育苗和自動取苗技術的發展[81]。同時,在引進國外先進移栽設備的同時,也引進了其配套的穴盤,如洋馬蔬菜移栽機配套的軟質十字底孔穴盤,Ferrari移栽機配套的泡沫穴盤等。蔬菜的品種、營養土配方、育苗方式、移栽農藝等在不同區域和不同氣候環境存在較大區別,阻礙了自動取苗技術的發展。
2.1.2蔬菜利潤降低,勞動者兼職化老齡化嚴重
隨著國內蔬菜產業的快速發展,市場趨于飽和,而蔬菜生產成本不斷增加,利潤逐漸降低。發展穴盤育苗和自動化移栽,從長遠看可有效降低蔬菜生產成本,提高生產率,但前期投入較大,后期需要對自動化設備進行維護保養,降低了蔬菜生產企業引進自動化設備的積極性。調查表明,大中城市郊區菜農平均年齡約為60歲,農村菜農平均年齡約55歲,蔬菜生產勞動力短缺、勞動力老齡化嚴重。另外,大多數蔬菜生產基地雇請的勞動力多為兼職農民,存在生產技能低、不能快速接受新技術等問題[82]。
2.1.3缺乏高性能取苗技術
近年來,我國全自動移栽機及自動取苗技術得到快速發展,相關論文和專利較多,但仍停留在實驗和樣機試制階段。所研制的自動取苗裝備往往針對特定作物、特定取苗條件,整體上存在通用性和適應性較差,傷苗率高、取苗效率較低等問題,嚴重制約了全自動移栽技術的發展。目前,市場上的全自動移栽機以仿制國外型移栽機為主,不適合我國蔬菜生產農藝。
2.1.4研發條件高、周期長、投入大
研發自動取苗技術需要科研單位具有較高的科研水平、生產能力和良好的試驗條件,科研人員應熟悉制缽、育苗、移栽等農藝,還應具備一定機械設計、建模仿真、試驗分析等能力。科研院所科研條件好,人員綜合素質高,但制造水平較弱,而農機企業生產能力強,科研能力較弱。取苗技術研發周期長,難度大,投入高,影響企業的持續研發的積極性。
2.2 應對措施
2.2.1制缽、育苗、取苗等環節統一標準
根據我國蔬菜種植農藝和自動取苗要求,統一穴盤規格,制定穴盤詳細技術參數,結合各地方氣候條件,依據現有行業、國家、地方標準,制定蔬菜育苗、移栽的詳細技術標準,使研發制缽、育苗、取苗設備時有章可循[83]。蔬菜生產各環節需緊密配合,技術上相互支持。例如,為防止取苗時發生散坨,缽體應具有一定粘結度;缽上播種時應盡量播到穴孔的中心位置,以提高穴盤苗均勻度;采用潮汐式水肥供應以提高穴盤苗的直立度;穴盤苗生物學特性和物理特性應均勻一致,避免穴盤苗之間莖葉發生纏繞。建立育種、制缽、育苗、取苗等環節技術體系,各環節、各學科技術人員進行聯合技術攻關,才能實現各環節農機農藝有機結合。
2.2.2采用新理念開發取苗技術
借鑒國外先進取苗技術,充分了解蔬菜缽苗力學特性和我國蔬菜種植農藝,總結現有取苗技術的優缺點,開放思路,采用新理念對取苗技術進行創新設計[84],包括取苗方式、驅動方式、機械結構的創新等,并通過仿真、試驗等手段不斷優化。在滿足農藝要求、提高自動化程度的前提下,兼顧取苗裝備的經濟性和實用性,提高自動取苗效率、精度和穩定性。對取苗效果好、適應能力強的取苗技術進行推廣。加快科研單位科技成果轉化,使科研更好的服務于實際生產。另外,要注重基礎研究,如營養土配比、缽體規格、缽苗力學特性等,為自動取苗技術的研究提供理論依據[85-86]。
2.2.3農業部門引導,國家宏觀調控
穴盤育苗和蔬菜生產機械化的可行性和經濟性已得到論證,但菜農知識水平和對新技術的認知能力普遍較低,對機械化生產和新技術的應用不能快速接受,為加快蔬菜工廠化育苗、機械化生產,農業部門應適時進行積極引導。促使家庭小規模生產經營方式轉變為大規模集約化生產管理,充分發揮工廠化育苗和機械化作業優勢。適當提高農機購置補貼,降低蔬菜移栽機械價格,加快全自動移栽技術的推廣[80]。另外,加強自動取苗技術的研發投入,制定相關政策,鼓勵育苗單位、科研院所和農機生產企業聯合攻關,加強知識產權的保護,以提高研發積極性。
我國全自動移栽目前發展不成熟,自動取苗技術還需進一步完善,因此,現階段應對半自動移栽機和全自動移栽機并重發展,在加快研制自動取苗技術的同時,加強推廣中小型半自動移栽機,以提高我國蔬菜生產機械化水平。
3 自動取苗技術發展方向探討
為快速實現蔬菜穴盤苗自動取苗,要從制缽、育苗、取苗等多方面進行系統完善,根據國內外全自動移栽機的發展和應用情況,對當前自動取苗技術總結分析,提出以下發展建議:
1)提高取苗速率,降低缽苗損傷率,提高取苗速率和取苗精度、降低缽苗損傷率一直是自動取苗技術研究的關鍵,取苗效率直接決定著自動移栽效率,因此,高速低損傷取苗一直是自動取苗技術的發展方向。
2)向簡單型和智能型發展,結構簡單,性能穩定,性能好的取苗技術優先推廣使用。同時,結合傳感器、視覺伺服控制、大數據、人工智能等現代技術,在完成取苗送苗作業的同時,實現秧苗識別、缺苗補償等功能,提高系統可靠性[87-92];
3)向機-電-液-氣一體式和機械式發展,機-電-液-氣一體式取苗機構取苗效率和自動化程度高,主要應用在大型寬幅移栽機上,適合平原地區大面積移栽。機械式單株取苗機構,靈活穩定,多用在小型移栽機上,適用于丘陵、溫室等小面積移栽。
4)取苗機構采用模塊化設計,并向標準化、系列化和規格化方向發展,根據不同取苗要求便于更換。通過對現有半自動機型進行少量改造,即可安裝自動取苗機構,實現半自動移栽機改造為全自動移栽機,從而提升半移栽機的自動化水平。
5)制缽、育苗、取苗、栽植一體式發展,基質配比、缽體尺寸、穴盤規格、工廠化育苗等環節統一技術標準,有利于實現蔬菜全程機械化作業,提高作業質量和生產效率。