鎧裝臍帶纜ROV作業距離分析
2021-03-24 13:40:18邱可陳浩深圳海油工程水下技術有限公司廣東深圳518067
化工管理 2021年6期
關鍵詞:作業
邱可,陳浩(深圳海油工程水下技術有限公司,廣東 深圳 518067)
0 引言
在非洲某淺水鋪管項目中,作業水深為6~40 m,主作業船舶為海油工程某大型鋪管作業船,搭載一臺150馬力的工作級ROV。該ROV為鎧裝臍帶纜Free-Swimming類型,其主要作業任務為協助主作業船布設海管起始錨和起始封頭、海管鋪設過程著泥點監控、臨時解鉤棄管和掛鉤起管以及布設終止封頭等作業。根據海管規格和作業水深測算出鋪設過程中的著泥點與船尾距離為180~340 m。為了核實該主作業船所搭載的ROV的作業距離是否滿足該項目海管著泥點監控需求,通過仿真軟件,測算出ROV鎧甲臍帶纜外表面未加裝浮力材料時和加裝浮力材料時所能飛行達到的最大距離。
1 ROV設備技術參數
表1為150HP工作級ROV實際向前推力參數和鎧裝臍帶纜技術參數。
2 未加裝浮力材料時ROV作業距離仿真模擬
表2為ROV鎧裝臍帶纜外表面未加裝浮力材料時仿真模擬軟件中設置的環境參數。結合地質調研數據,作業區域地處赤道附近,沒有臺風影響,常年有15級左右的西北風,表面流速平均在0.5級左右,浪高在0.5~1 m之間。根據實際情況,設置一般情況下平均海流流速數值、流向和海底摩擦系數等參數。值得注意的是,該ROV所設計的最大向前推力為900 kgf,但工程實際運用中,考慮到ROV運轉過程的動力分配和高溫影響等問題,一般將ROV的輸出功率調至50%,即是最大向前推力為450 kgf。
表3為鎧裝臍帶纜未加裝浮力材料時仿真模擬出的最大作業距離值。
綜上,得出當ROV鎧裝臍帶纜未加裝浮力材料且輸出功率為50%時,海況為靜態時ROV的最大作業距離為264 m,平均浪高為0.5 m時ROV的最大作業距離為230 m,平均浪高為1 m時ROV的最大作業距離為180 m。顯然,實際作業中海況不可能為靜態,因此當ROV鎧裝臍帶纜未加裝浮力材料時,最大的作業距離一般以平均浪高為1 m考慮,即為180 m,不能滿足項目所要求的著泥點與船尾距離為180~340 m的著泥點監控作業。

表1 ROV推力參數和鎧裝臍帶纜技術參數

表2 鎧裝臍帶纜未加裝浮力材料時仿真參數

表3 鎧裝臍帶纜未加裝浮力材料時仿真模擬的最大作業距離值
3 加裝浮力材料時ROV作業距離仿真模擬
ROV鎧裝臍帶纜加裝浮力材料時仿真模擬軟件中設置的環境參數與未加裝浮力材料時一致。考慮到浮力材料的浮力大小、安裝間距、規格尺寸等,將浮力材料設計分為浮力5 kg級和10 kg級。圖1是根據鎧裝臍帶纜尺寸設計的快速安裝卡扣式浮球。

圖1 鎧裝臍帶纜安裝的卡扣浮球
表4為鎧裝臍帶纜加裝20個5 kg級和20個10 kg級浮力材料仿真模擬數據。
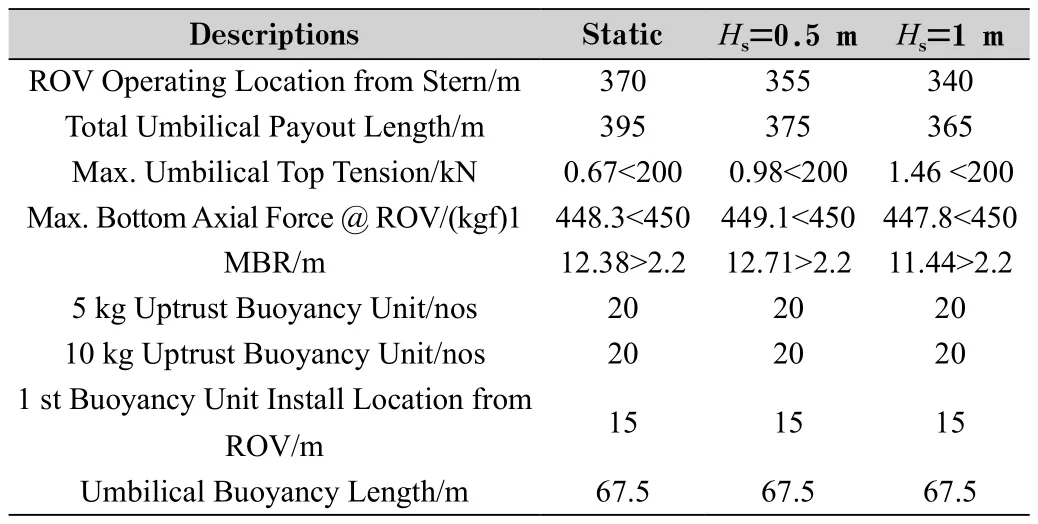
表4 鎧裝臍帶纜加裝20個5 kg級和20個10 kg級浮力材料仿真模擬數據
圖2為ROV在距離船尾340 m的模擬示意圖。
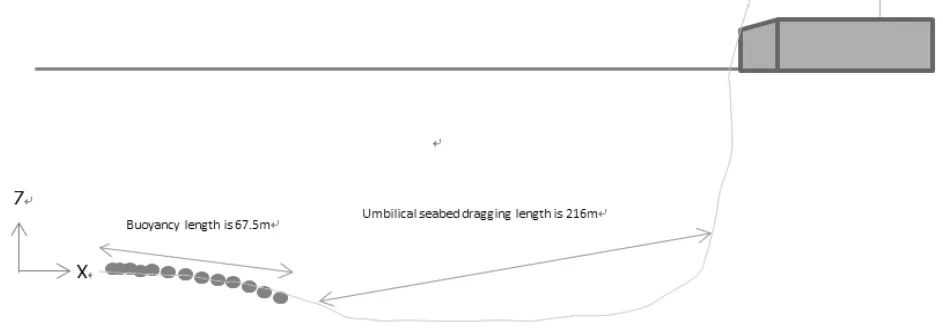
圖2 ROV距離船尾340 m的模擬示意圖
圖3為鎧裝臍帶纜安裝5 kg級和10 kg級浮力球后觸泥點距離ROV 100 m示意圖。靠近ROV端為5 kg級浮球,第一個浮球距離ROV為15 m,5 kg級浮球的間距為1 m,10 kg級浮球的間距為2.5 m。
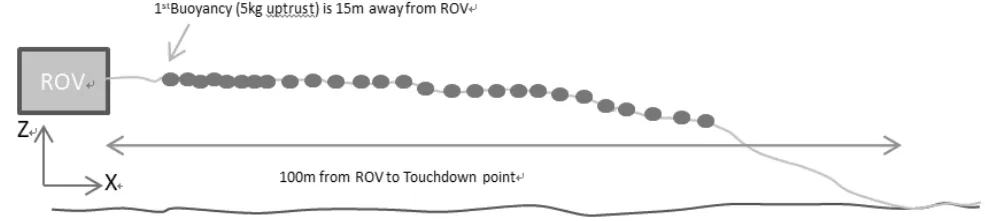
圖3 鎧裝臍帶纜安裝5 kg級和10 kg級浮力球后觸泥點距離ROV 100 m示意圖
綜上,得出當ROV鎧裝臍帶纜加裝浮力材料且輸出功率為50%時,海況為靜態時ROV的最大作業距離為370 m,平均浪高為0.5 m時ROV的最大作業距離為355 m,平均浪高為1 m時ROV的最大作業距離為340 m,能滿足項目所要求的著泥點與船尾距離為180~340 m的著泥點監控作業。
4 鎧裝臍帶纜加裝級浮力材料實際應用情況
在該項目中,實際的作業水深在6.8~42 m,作業期1月份正值雨季,風速明顯增大,白天風速平均在20級左右,浪高平均在2 m左右,通過鎧裝臍帶纜上加裝浮力材料后,ROV圓滿的完成了實際的海管鋪設過程中的著泥點監控作業。實際作業工程中積累了相應的作業經驗。
(1)加裝和拆卸浮力材料耗時較長,若是海管鋪設速度較快時,這種方式不能很好地配合鋪設速度,因此鎧裝臍帶纜Free-Swimming ROV類型不是最佳選擇,建議選用軟纜零浮力Free-Swimming ROV類型。
(2)模擬出的最后一個浮球距離臍帶纜的著泥點有5~10 m的距離,處于懸浮狀態。但實際應用過程中,按照實際設計的浮力10 kg級的浮球2.5 m間距安裝,受臍帶纜自身重力的影響,倒數兩到三個浮球基本是接觸海底,呈拖拽現象,很容易脫落。因此,通過不斷的嘗試更改安裝間距,增加3個10 kg級浮球且倒數5個浮球的安裝間距調整為1 m后,最后一個浮球距離臍帶纜著泥點為5 m。
(3)安裝浮球之后,鎧裝臍帶纜還有200 m左右拖拽在海床上,由于自身的重力和摩擦力影響,ROV的飛行靈活性會受一定影響,這就要求ROV操作人員要和收放系統操作人員保持不間斷的語音通話,進行默契配合,臍帶纜時刻保持合適的張力,保證ROV的動作安全和靈活性。
(4)在通過特殊地形地貌時,要注意臍帶纜不被纏繞和浮球不被卡住,選擇安全合適的飛行路徑,保證臍帶纜和ROV的安全。當發現無論如何調整ROV的輸出功率都不能大幅度動作時,要考慮是否已經纏繞或臍帶纜張力過大,此時應當綜合判斷之后再做處理。
(5)在回收ROV時,由于臍帶纜的張力較大,人員在拆卸浮球時要保持合適的安全距離,防止人員受傷。
5 結語
ROV的運用場景多樣化,目前可以完成導管架檢測、導管架安裝支持、海管鋪設支持、海底管線巡檢、海底電纜鋪設和檢測、膨脹彎安裝支持、海底管線懸跨處理、采油樹安裝支持、水下基盤安裝支持、清管試壓支持、跨接管安裝、風電水下部分安裝支持以及其他應急搶修作業。以往海油工程水下作業部分是由潛水員完成,但隨著水深的不斷加大,常規的空氣潛水和飽和潛水不能滿足現有作業水深的工程項目,ROV的作業能力和操作人員的技術水平不斷提升,有助于海油工程的持續發展和深入。ROV的作業距離大小是衡量ROV作業能力的重要指標之一,ROV作業公司在投標之前要認真研究施工合同中所要求的ROV作業距離,選擇合適的ROV類型,或者采用上述或其他措施來增大ROV的作業距離。文章以項目實際為背景,通過仿真模擬的方式進行ROV作業距離的分析研究,給現場實際作業提供了可靠依據,并按照仿真模擬的結果運用到實際項目中,但受現場流速、流向、風速等不穩定因素的影響,所安裝的具體的浮球數量和間距會有細微調整,但不影響實際施工效果。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08