應用圖像處理技術的艙室液位識別算法研究
2021-03-25 02:09:42羅光宇
軟件導刊 2021年3期
臧 濤,羅光宇
(1.海軍駐武漢地區第二軍代室;2.武漢理工大學自動化學院,湖北武漢 430070)
0 引言
船舶在正常使用或戰斗過程中,會發生許多安全事故(例如艙底浸水、火災、通海管道破損等),即損壞管制(簡稱“損管”)[1],這些問題如果得不到處理,將影響該船舶的正常航行,嚴重時甚至可能導致沉船事故發生。因此,如何迅速準確、有效地定位受損隱患,并及時對不同損害采取有效措施,是一個亟待解決的難題。
針對艙室浸水問題,需要系統對艙室液位進行識別檢測。目前,自動測水方法主要有浮子式、壓力式、超聲式和雷達式水位測量[2]。王德利等[3]設計了一套利用浮子式液位計進行液位測量的校準系統,其通過提升裝置帶動液位變化,雖然減少了環境對液位檢測的影響,但是存在建設維護費用高的問題;姜繼生等[4]利用壓力式液位計對水箱液位進行測量,雖然模擬測試效果好,但是此裝置易受環境影響,一旦應用在船舶復雜運行環境下,遭遇外界風浪時,采用此方式進行液位檢測就存在較大誤差;白琳[5]利用超聲波設計了一套液位測量系統,雖然該系統具備較高的精確度,但是面對船舶運行中其他介質的干擾,此方法易出現誤檢測情況,從而影響檢測結果;徐俊等[6]闡述了雷達式液位測量技術在船舶中的應用,該方法具有高精度、低功耗的特點,且不受外界環境影響,但需要較多軟硬件單元聯合建立,維護費用較高。
上述方法都存在自動化程度較低、建設維護費用高、易受現場環境影響、適應性差等問題。為了提高艙室液位檢測精度,減少建設維護費用及外界環境影響,提高液位檢測方法的適應性,本文提出一種應用圖像處理技術的艙室液位檢測算法,并運用自矯正技術使系統具有較強的自適應和抗干擾性能,最后通過模擬實驗將系統測得的液位與實際液位進行對比,得出相對誤差并作分析。
1 艙底液位檢測系統設計
1.1 算法流程設計
本文將水箱模擬為船艙艙室,實現對船艙內水位高度的判斷。由于水箱高度已知,只需要識別出液位與箱身在圖像中的高度之比即可推出液位檢測高度。工具采用QT和OpenCV。
圖像處理算法包含對獲取圖像的預先處理、對圖像顏色進行閾值分割、輪廓檢測、對獲取的圖像與預先設置的標準進行比對,從而得到所需結果[7]。本文提出的船舶艙室液位識別檢測系統還具有自適應中值濾波、直方圖分析,以及透視失真的自矯正功能,提高了液位檢測的抗干擾性和自適應性。針對船舶艙室的液位檢測算法流程如圖1 所示。
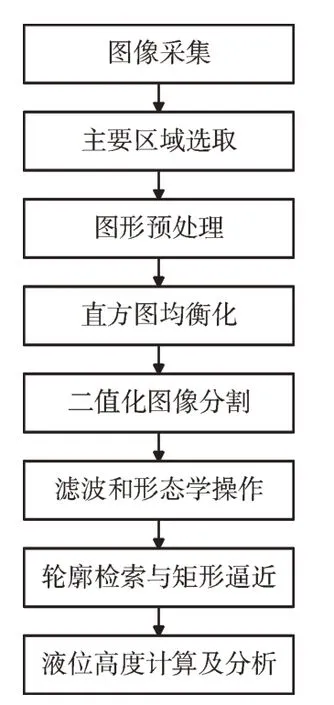
Fig.1 Liquid level detection algorithm flow圖1 液位檢測算法流程
1.2 設備選擇
本文船舶液位檢測系統的硬件部分由艙室照明燈、艙室攝像機、計算機系統組成,如圖2 所示。
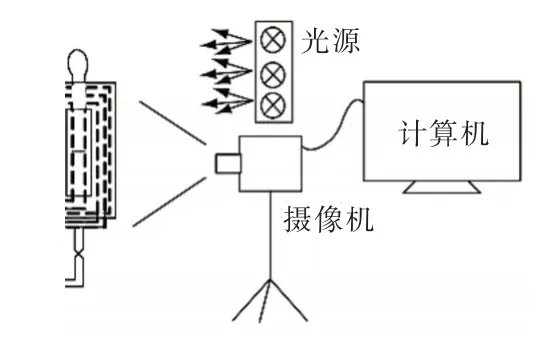
Fig.2 Device Selection圖2 設備選擇
為了保證光源可靠和高壽命,照明燈部分采用了發光二極管(光源發射二極管,led)的圓頂光源。為了降低陰影部分對圖像采集效果的干擾,利用漫射的正面照明。為了提高圖像采集系統的分辨率和集成性,艙室攝像機部分采用了金屬氧化物半導體(Complementary Metal Oxide Semi?conductor,CMOS)的高像素攝像頭,分辨率為1 080×1 920。在選擇與計算機接口的攝像頭和電腦接口時,為了保證視頻數據的快速傳輸和收集,采用串行總線(Universal Serial Bus,USB)進行數據傳輸。
2 圖像處理流程
2.1 基于ROI 的圖像采集
本文采用的圖像為CCD 相機在有光源的環境中拍攝而來,圖像尺寸為1 920×1 080,色彩信息為BGR 存儲。由于拍攝視野較大,目標對象在采集過程中只占一定區域,為了降低需要處理的數據,在不失去主要信息的情況下,對源圖像進行ROI 選擇[8]。經觀察,主要部分分布于圖像上部,選取的圖像大小為500×1 500,利用此方法可以提高圖像處理效率。
2.2 圖像預處理
由CCD 相機采集到的圖像在經下一步分析之前,需利用圖像預處理技術對獲取的圖像進行操作。通過圖像預處理操作可以使得圖像信息簡單、層次、重點突出。簡單即去掉圖像中所需的或多余干擾信息,有層次是使所保留的信息在層次上更加清晰,輪廓更明顯,重點突出就是突出研究對象,這樣對特征信息的提取和物體匹配的識別更方便,也更加穩定[9]。
本文通過高分辨率工業CCD 相機收集液位圖像信息,在拍攝時可能由于場景照明不均勻、CCD 相機內部光學成像畸變,以及周圍環境溫度、濕度等因素影響,在獲取液位圖像信息時,通常會夾雜著噪聲,因此在作深入研究前,首先應經過一些環境照明,以便進行深入研究。通過一系列圖像預處理操作,去除采集圖像中的噪聲和背景,從而增強與液位刻度和數字字符相對應的信息。
由于攝像頭原始圖像有噪點且為彩色BGR 圖像,不易處理,需要首先對圖像進行去噪和灰度化處理。
2.2.1 去噪
在液位圖像探測系統中,CCD 相機所獲取的液位圖像受到多種形式噪聲的影響,此時需要使用圖像濾波處理圖像。通過濾波技術可以在減少圖像噪聲的同時保持圖像細節的紋理特征,以便后續對圖像作進一步分析和處理,圖像去噪效果好壞取決于圖像濾波效果好壞。因此,選擇適當的濾波法對于圖像去噪處理非常重要。本文采用濾波技術對像素周圍的像素值和濾波算子進行卷積計算[10],以確定該像素最終輸出值。可用式(1)計算圖像濾波。

其中,K為濾波器,也稱為核。
本文基于雙邊濾波原理設計非線性濾波法,既考慮到圖像空間的鄰近性,又考慮到像素的相似度,同時考慮到灰度的相似度和空域信息,是一種折中處理方法。此種濾波方法在保證邊緣信息的基礎上實現噪聲去除,具有簡單、局部、非迭代的性質[11]。
雙邊均值噪聲濾波法可對高頻圖像的邊緣紋理信息節點進行模糊處理,并準確保存高頻圖像紋理模糊信息。此函數實現主要是由于雙邊高斯濾波器需要增加高斯方差,指一個基于圖像兩邊空間的高斯濾波器函數,它能夠充分考慮到一個圖像兩邊空間的像素分布,因此離放在邊緣更遠的每個像素對放在邊緣的每個像素不會產生過大影響,這樣可以有效地確保放在邊緣附近的每個像素的取值。在鄰域雙邊像素濾波器中,濾波后的雙邊像素函數值由鄰域雙邊像素的兩個加權函數組合計算得到,公式定義如式(2)。
采用中值濾波器作進一步去噪預處理,可有效消除圖像中的脈沖噪聲,有利于邊緣尖銳度保留。中值矩形濾波器通常可將一幅圖像的每個矩形像素轉換成一個圍繞該矩形像素的一個整數矩形鄰域和其中一個矩形中值[12]。如圖3 所示。
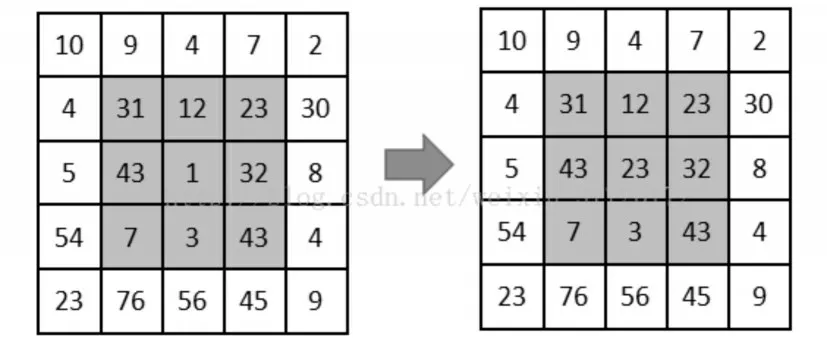
Fig.3 Median filtering principle圖3 中值濾波原理
2.2.2 灰度轉化
圖像中的灰度轉換處理是通過3 個灰度分量中的r、g、b 對彩色圖像的灰度、顏色、大小進行灰度轉換,獲得圖像灰度處理信息的一個過程。而且,這種顏色改變使獲得的那些灰色色彩圖像仍可以繼續保持高于原圖的顏色飽和性、亮度等重要特征。此外,彩色圖像數據灰度化分析能將彩色三通道圖像數據同時轉化成一個彩色單通道,數據損失較少,在彩色圖像灰度分析中,計算量減少,提高了在圖像分析處理時的效率。
灰度化的顏色處理實現方法很多,本文主要采用液位加權值的平均值對一個液位中的圖像顏色進行一次灰度化顏色處理,實現過程如下:根據亮度rgb 和亮度yuv 兩個顏色分量空間之間的亮度變化,建立圖像亮度y 和分量r、g、b 顏色分量之間的亮度對應變化關系,利用其亮度對應描述液位圖像的顏色性質。
輸入的圖像是rgb 彩色圖像,不方便處理,需要將其轉換為灰色圖像,對每個像素點的轉換公式如式(3)。

預處理后的圖像如圖4 所示。

Fig.4 Grayscale image after preprocessing圖4 預處理后的灰度圖
2.3 直方圖均衡化
為了增強對比度,使灰度圖中液體與液位上部瓶身灰度區分更加明顯,采用直方圖作均衡化操作[13]。算法原理為:
首先對灰度圖所有像素進行掃描,計算出圖像的歸一化直方圖H,如式(4)。

其中,n是圖像總數,nk是圖像的第k個灰度級別(k=0,1,2,…,255)。
第二步計算直方圖積分,公式如式(5)。

最后認為查詢表是圖像轉換結果,如式(6)。

變換后的結果如圖5 所示。

Fig.5 Image after histogram equalization圖5 直方圖均衡化后的圖像
2.4 二值化圖像分割
圖像分割本質上是一種分類,將目標圖像劃分為感興趣區域和余下區域,然后提取感興趣區域,并作進一步研究和分析。圖像分割實現算法很多,大致可以分為基于像素閾值的分割方法、基于邊緣的分割法、基于區域分裂和合并的算法、區域生長算法、特征聚類、匹配等。其中,以閾值為基礎的圖像分割法是圖像分割中最簡單、穩定的方法,適合于液位區域分割。由于閾值分割方式存在最大類間誤差法、最小誤差法和最大熵法[14-15],且以上3 種方法都是基于全局的閾值分割方法,對于艙底液位檢測而言,由于存在外部自然光照及內部照明燈,其對閾值分割效果較差。基于文獻[16]研究結果,本文采用基于局部自適應的閾值分割方法對艙底液位圖像信息進行分割。
本文設計基于局部自適應的二值分割法,與全局閾值分割不同,它通過像素窗函數中的像素值確定該像素位置的二值分割閾值,是一個局部分割法。因此,每個像素位置的二值化閾值并非定值,而是動態變化的,它依賴于鄰域像素分布。顯然,在圖像中明亮度更高的像素區間中,局部自適應產生的閾值也較大,在明亮度更低的像素區間,局部自適應產生的閾值將適當縮小。利用該方法,圖像中亮度不同、細節紋理及對比度不同的局部圖像區域將會有相應的局部二值化閾值。
常用的局部自適應閾值分割方法有兩種:①將該點局部窗口函數的平均值設為該點二值化的閾值;②對計算該取值點的一個局部窗口化學函數的值進行高斯加權,作為計算該取值點的二次取值點在化學函數下的值[17]。
本文所設計的局部自適應閾值分割是采用鄰域塊的高斯加權計算的二值閾值。經計算后結果如圖6 所示。

Fig.6 Image after threshold segmentation圖6 閾值分割后圖像
2.5 濾波與形態學操作
閾值分割后液體和箱頂能大致凸顯出來,但液位上方仍有很多干擾,因此需要再經過濾波和形態學操作對圖像作進一步處理。
濾波依然采用中值濾波[18],鄰域尺寸選擇7 像素點,效果如圖7 所示。

Fig.7 Filtered image圖7 濾波后圖像
這樣,液位上方的干擾完全消失,而液體和瓶蓋的白色部分也存在黑洞,有些在黑色部分中也有微型的白塊。為了確保后輪廓識別的唯一性,需要將圖像進行形態學操作,將圖像劃分為幾個獨立的完整區域。
形態學操作[19]包含腐蝕和膨脹。膨脹操作是一項卷積操作,將目標元素的值替換成卷積核所覆蓋的區域和局部最大值,如式(7)。

腐蝕與膨脹相反,如式(8)。

利用上述方法,先對濾波后的圖像進行3×3 的核腐蝕,再利用15×15 的核連續進行3 次膨脹,操作后得到的圖像如圖8 所示。

Fig.8 Image after morphological manipulation圖8 形態學操作后的圖像
2.6 輪廓檢索與矩形逼近
在已經得到的二值圖像中,液體區域對應下方白色區域,箱頂(對應艙頂)對應上方小塊白色區域,背景對應像素為黑色,現對此液位圖像輪廓進行檢索。
輪廓檢索選擇多邊形近似方法,對于一條閉合邊界,當多邊形的邊數目等于邊界上的點數時,這種近似會變得很精確,此時每對相鄰點定義了多邊形的一條邊。尋找到的輪廓用線條標出。
輪廓尋找到后,為了方便像素距離計算,需要對輪廓繪制邊界框。矩形邊界框的提取基于Douglas-Peucker 算法[20],原理如圖9 所示。
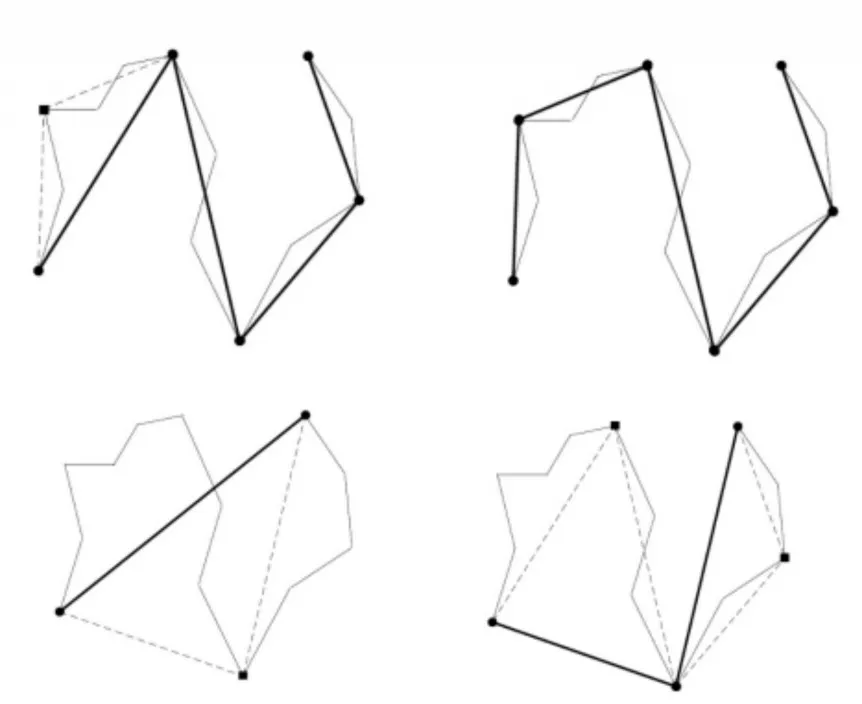
Fig.9 Principle of Douglas-Peucker algorithm圖9 Douglas-Peucker 算法原理
Step1:將連續曲線首尾兩點設為A、B,直接相連后形成一條直線AB;
Step2:得到曲線上離該直線段距離最大的點C,計算其與AB 的距離d;
Step3:將d 和預先設定的閾值進行對比,如果d 小于此閾值,則將AB 作為此曲線的近似,算法結束,否則繼續進行下一步;
近年來,新疆生產建設兵團第一師食品藥品監督管理局全面貫徹落實黨的十八大和十八屆三中、四中、五中、六中全會精神,深入學習貫徹習近平總書記系列重要講話精神,以“四個最嚴”為統領,落實“四有兩責”,切實履行食品藥品監督管理工作職能,落實“控、防、打、建”一體化要求,切實保障了人民群眾“舌尖上的安全”。
Step4:若d 大于此閾值,則利用C 將曲線分成AC 和CB兩條曲線,執行Step1-Step3 步驟;
Step5:所有曲線處理完畢后,依次將所有分割點相連形成的折線即可近似為原曲線,從而完成輪廓提取。
最終液位檢測結果如圖10 所示。

Fig.10 Final liquid level detection圖10 最終液位檢測
3 結果計算及分析
可以看出,最終檢測出了一條水平線(見圖10 中綠色,彩圖掃OSID 碼可見),整體圖像矩形框出了箱頭,下面框出箱底,輸出為一個Rect 變量和一個綠色線高度,這是Opencv 中的一種數據類型,包含成員變量(x,y)(矩形左上角頂點)、width(矩形寬度)、height(矩形高度)。最終結果通過式(9)-式(11)計算:
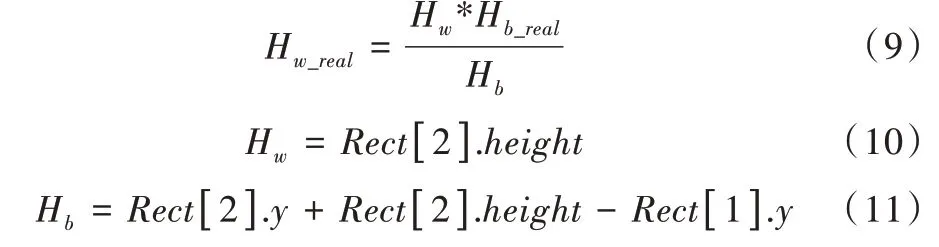
其中關系對應如表1 所示。
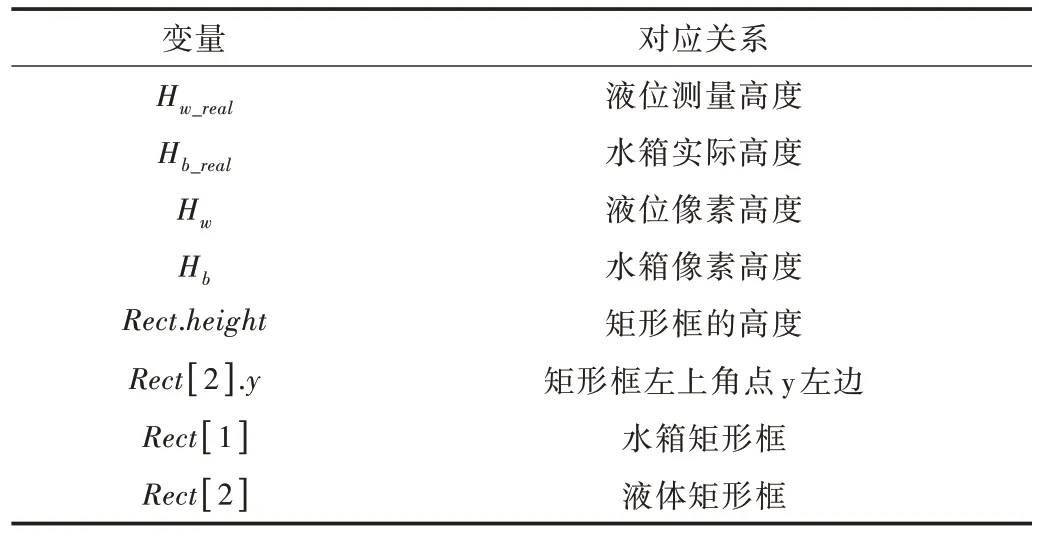
Table 1 Variable relationship correspondence表1 變量關系對應
計算時需要先輸入水箱(艙室)實際高度,可預先通過標準直尺測量,輸入20(cm)。
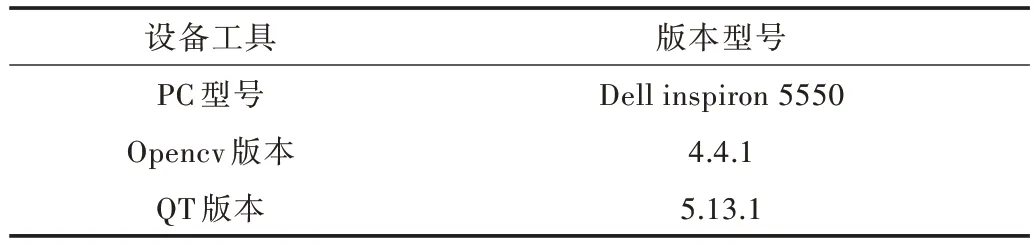
Table 2 Device and software version model表2 設備及軟件版本型號
本文利用水箱模擬船艙,基于上述算法對艙底液位進行檢測試驗,其結果如表3 所示。
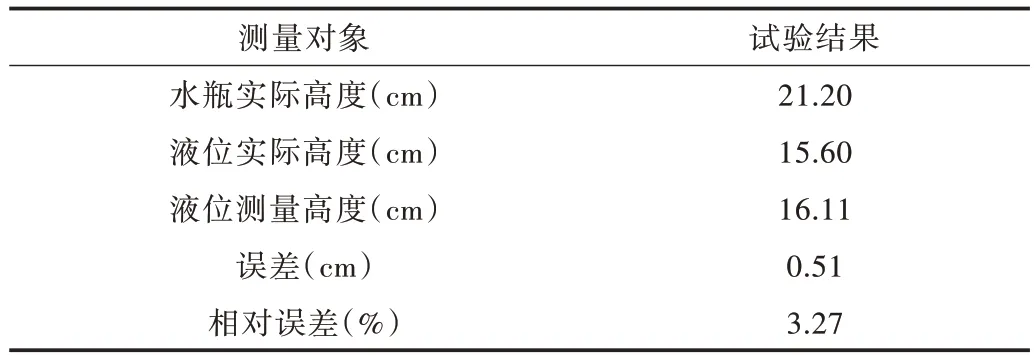
Table 3 Test results表3 試驗結果
經試驗發現,本文設計的船舶艙底液位識別系統對液位測量的相對誤差達3.27%,正確率達96.73%,具有良好的精確度。
4 結語
本文將圖像處理技術應用于船舶艙室液位識別,將水箱模擬為船舶艙室,將提取的液位圖像信息利用圖像預處理實現圖像去噪及灰度轉化,然后利用圖像閾值分割技術及濾波和形態學操作對圖像作進一步細化處理,最后通過Douglas-Peucker 算法實現液位圖像的輪廓提取。對提取的液位高度與實際高度進行對比分析,結果顯示測量相對誤差達3.27%,此方法已初步應用于部分損管項目。
該識別方法具有準確率高、泛化能力強、識別速度快、環境適應能力強等特點,可以取代浮子、壓力式、超聲波和雷達自動水位式等傳統檢測方法,且該識別方法可封裝成智能識別系統,利用Java 接口提供第三方服務,部署靈活、適應能力強。未來可以繼續深入挖掘艙室液位圖像信息,將現場檢測的干擾因素作為識別目標,實現環境自動檢測異常預警,提高檢測識別運行效率。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
電子測試(2017年11期)2017-12-15 08:57:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維護與修理(2015年2期)2015-02-28 12:15:41