火箭子級垂直回收布局氣動特性及發動機噴管影響
2021-03-26 09:50:50賈洪印張培紅趙煒周桂宇吳曉軍
航空學報 2021年2期
關鍵詞:區域
賈洪印,張培紅,趙煒,周桂宇,吳曉軍
中國空氣動力研究與發展中心 計算空氣動力研究所,綿陽 621000
航天運輸系統的技術水平代表著一個國家進出空間的能力,體現著一個國家利用空間和發展空間技術的能力,是國家綜合國力的象征,發展能重復使用的航天運輸系統對于滿足中國未來空間開發和降低發射成本等需求具有重要意義[1]。垂直回收可重復使用運載火箭是運載火箭發展的一個重要方向,火箭子級垂直返回再入彈道包含以下典型過程:在火箭一二級分離后,一子級利用自身動力裝置進行制動減速轉向,柵格舵氣動控制面展開,子級主發動機噴口向前按照預定的軌跡和姿態再入返回,返回過程中利用柵格舵控制、氣動減速和擺動噴管控制等復合控制手段,垂直穩定地降落到指定區域[2]。垂直回收重復使用運載火箭的整體構型與傳統火箭沒有明顯差別,只需在現有火箭的基礎上,對動力系統和回收控制系統做進一步改進,即可實現火箭子級的垂直安全回收[3]。
國外在火箭子級垂直回收方面開展了大量的研究工作[4],其典型代表包括麥道公司提出的“德爾它快帆”(DC-X)方案、藍源公司的“新謝潑德”(New Shepard)運載火箭和SpaceX公司的“獵鷹-9R”(Falcon-9R)運載火箭。目前投入實際使用的獵鷹-9R運載火箭,通過柵格舵和姿控發動機(Reaction Control System,RCS)、擺動噴管復合控制技術,實現了火箭子級精確定點垂直回收[5]。而國內針對火箭子級垂直回收的研究工作剛處于起步階段[6-7],技術基礎還比較薄弱,火箭子級垂直返回中面臨的氣動問題與常規飛行器差異較大,對其中的技術難點還缺乏系統的認知,相關技術還亟需解決突破。
火箭子級垂直再入過程屬于典型的非規則鈍頭體繞流,與傳統的低阻力流線體飛行器氣動特性差異較大[8-9]。在鈍頭體繞流方面,工程上的典型構型是飛船返回艙,國內外針對返回艙類飛行器構型在寬速域飛行時帶來的靜動態氣動力、氣動熱、氣動物理問題開展了大量的研究工作[10-12],返回艙構型一般較短,迎風減速大底區域相對平整光滑,氣動特性預測的難點是后體收縮時產生的復雜大分離流動。而火箭子級長細比較大,垂直再入過程中飛行速域寬,火箭底部發動機的噴管朝前,在較低馬赫數時,氣流經過大的平頭體后會在肩部區域發生明顯的流動分離,高馬赫數時鈍頭頭部產生較強的脫體激波,且受到外露發動機噴管布局的影響,使得頭部激波呈現非規則狀態,再入過程頭部附近區域繞流異常復雜[13-14]。目前針對以柵格舵為控制舵面的火箭子級垂直再入構型的氣動特性研究還相對較少,對其氣動特性規律還缺乏系統的認知。
本文針對基于柵格舵的火箭子級垂直回收氣動減速過程中面臨的氣動問題開展研究,設計了適用于火箭子級垂直回收的柵格舵布局方案,完成了馬赫數0.6~3.0范圍內的火箭子級倒飛狀態氣動特性分析,獲得了此類構型馬赫數、迎角影響規律,開展了噴管布局影響研究和柵格舵控制舵效分析,給出了火箭子級垂直回收布局設計建議。
1 子級垂直回收布局方案
以當前應用較多的?3.35 m直徑火箭子級為研究對象,開展了適用于子級垂直回收的氣動布局方案設計。方案設計時以柵格舵為控制舵面,綜合考慮其再入過程中對氣動力/熱/控制的影響,要求柵格舵上升段對運載火箭的飛行安全、運載能力和氣動特性影響均較小,再入返回段柵格舵展開后,能夠提供足夠的氣動穩定性,同時能夠滿足控制要求的氣動效率。
設計的垂直回收構型如圖1所示,柵格舵采用弧形設計,上升段折疊安裝,對火箭的運載能力和飛行安全影響較小[15],安裝位置位于火箭一二級連接艙段處,4片柵格舵呈“X”字形布置,柵格格子數目為6×6,柵格舵弦長90 mm,格子寬度110 mm,格片厚度為5 mm,對應的設計格弦比為0.82,柵格舵外框尺寸約為1 000 mm×1 000 mm,采用雙立柱支撐與火箭箭體相連接。火箭底部區域存在4個外露的發動機噴管,均勻分布在4個象限的中間區域,噴管的外露長度約為930 mm。
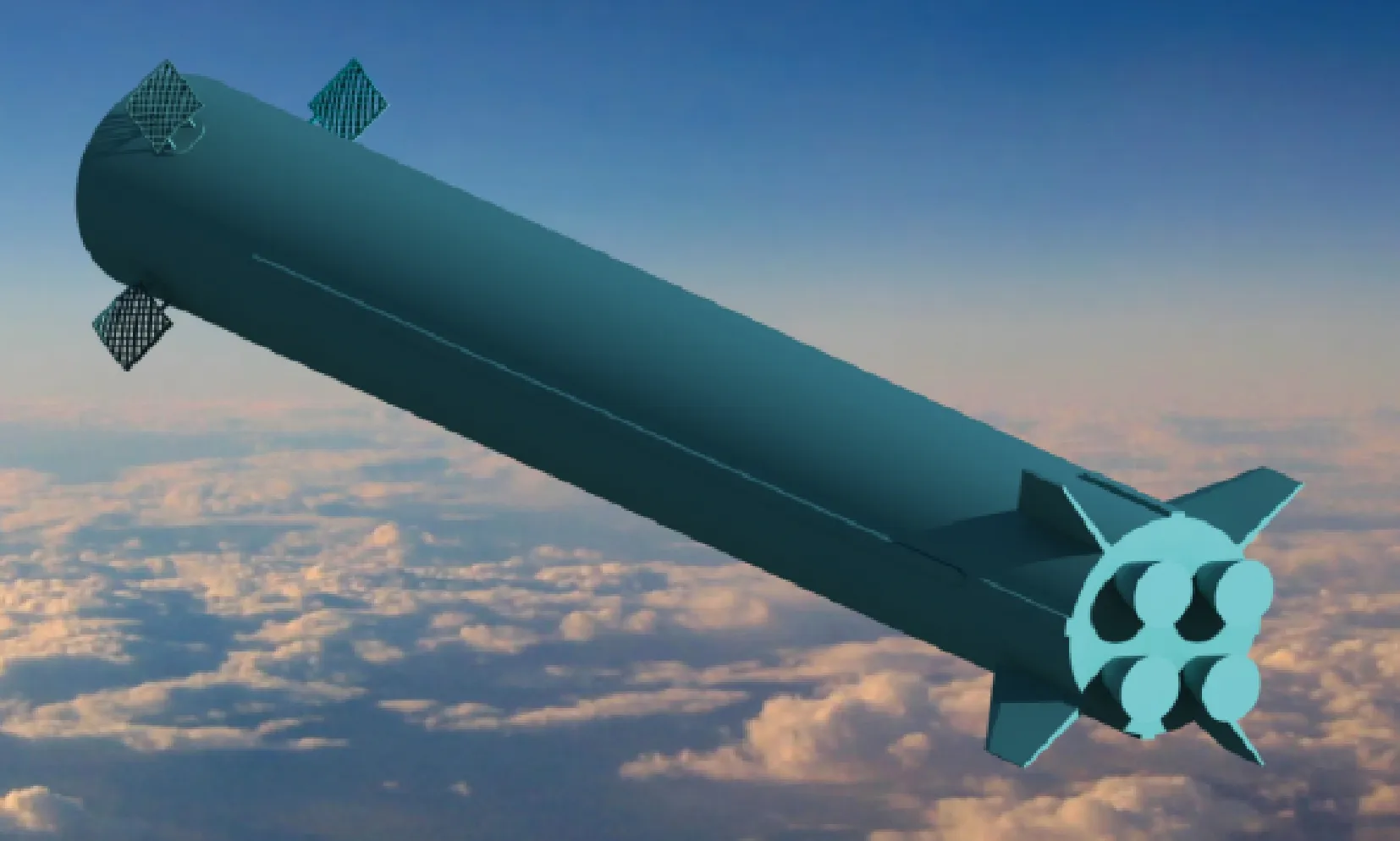
圖1 子級垂直回收氣動布局Fig.1 Aerodynamic layout for vertical recovery of sub-stage
2 氣動特性分析方法及驗證
采用風洞試驗為主輔以數值仿真分析的方式,對火箭子級垂直回收構型在馬赫數0.6~3.0范圍內的氣動特性進行了研究。風洞試驗在中國空氣動力研究與發展中心FL-24亞跨超聲速風洞完成,風洞試驗采用的是尾支撐構型,模型縮比為1∶25,對應不同馬赫數下的單位雷諾數如表1所示;數值仿真采用的是中國空氣動力研究與發展中心自主開發的大規模并行流場解算器MFlow,該解算器經過了大量的標模考核驗證[16-17],為了方便對比分析,數值仿真雷諾數按照風洞試驗雷諾數選取。

表1 風洞試驗不同馬赫數下對應的單位雷諾數Table 1 Unit Reynolds number of wind tunnel test with different Mach numbers
數值模擬網格采用的是六面體、三棱柱、四面體混合的非結構網格單元,如圖2所示,網格總量約4 500萬,控制方程采用的是定常雷諾平均Navier-Stokes方程,湍流模型采用的是SST(Shear Stress Transport)兩方程湍流模型[18],對流項離散采用的是目前應用廣泛、具有較高間斷和黏性分辨率的Roe格式,時間項采用的是隱式LU-SGS方法,梯度求解采用的是節點型Gauss方法。同時,為了加速流場收斂,采用了多重網格技術和局部時間步長技術。
圖3給出了馬赫數1.2和馬赫數3.0時數值仿真和風洞試驗的對比曲線,可以看出,數值計算與風洞試驗一致性較好,尤其是在馬赫數3.0時,法向力特性CN曲線基本一致,子級垂直再入過程中軸向力系數CA較大,數值仿真和風洞試驗的軸向力系數誤差在3%以內,由于箭體自身產生的俯仰力矩系數Cm較小,在馬赫數1.2迎角5°以后出現了一定的偏差。總體來說,數值仿真預測的俯仰力矩隨迎角的變化趨勢與風洞試驗一致,說明本文采用的數值模擬方法和網格技術可以較好地模擬帶柵格舵的火箭子級垂直回收氣動特性,驗證了方法的可靠性。
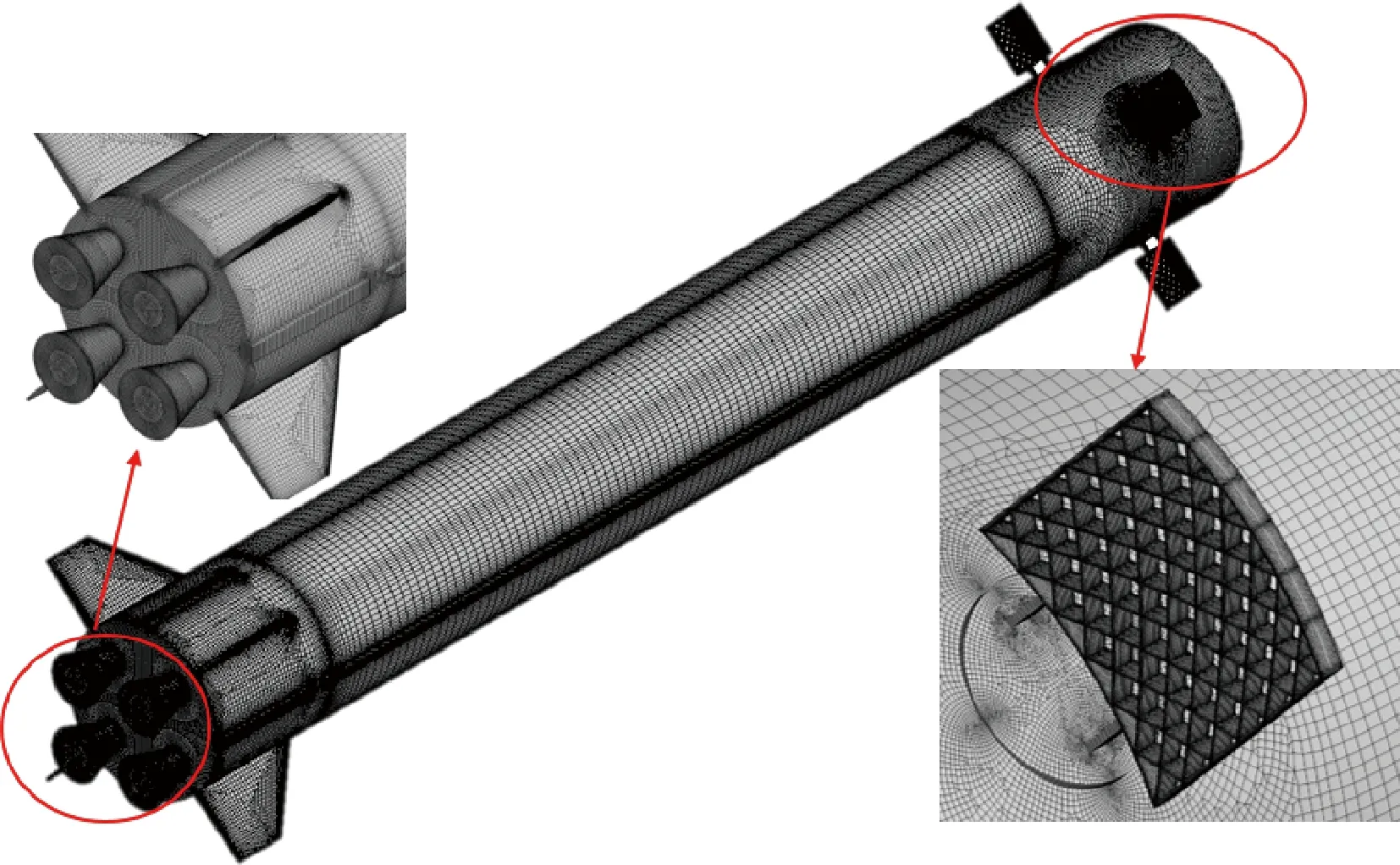
圖2 數值模擬網格Fig.2 Numerical simulation grids


圖3 計算與風洞試驗對比Fig.3 Comparison between calculation and wind tunnel test
3 結果分析
本文針對帶柵格舵的火箭子級垂直回收構型在馬赫數0.6~3.0范圍內的氣動特性進行了研究,不同馬赫數對應的單位雷諾數如表1所示,從基本氣動特性規律、迎風外露噴管和柵格舵影響及柵格舵控制舵效分析3方面給出了相關研究結果。在3.1~3.3節的分析中,氣動特性規律曲線均為風洞試驗天平測力結果,相關流場分析采用的是數值仿真結果。力矩特性分析時質心取距離發動機噴管出口35%彈長的位置。
3.1 基本氣動特性
圖4給出了火箭子級垂直再入過程中馬赫數0.6~3.0時的軸向力特性曲線,可以看出,軸向力系數在馬赫數1.5附近達到最大,但隨著來流馬赫數的進一步增大,軸向力變化不明顯。這與常規飛行器氣動特性規律存在明顯的差異性,產生這種差異的主要原因是倒飛狀態頭部區域為迎風平頭端面,在高馬赫數情況下,會產生較強的脫體分離激波,迎風端面區域的壓力會一直處于較高的水平,且馬赫數越高,迎風端面區域的壓力越高,導致氣動阻力越大。所以,雖然柵格舵部件上的軸向力在跨聲速以后隨著馬赫的進一步增大會明顯降低,但由于倒飛狀態迎風端面高壓區域壓力增大影響,使得火箭子級倒飛狀態的阻力一直處于較高的水平。在火箭子級回收方案設計時,如采用發動機反向噴流進行減速,需要充分評估權衡氣動減速與發動機反向噴流工作減速的效果和收益。
圖5給出了火箭子級垂直再入過程中馬赫數0.6~3.0的壓心特性Xcp曲線,在小迎角±2°范圍內,由于法向力和俯仰力矩量值均較小,壓心采用最小二乘法擬合得到,從曲線中可以看出,對于火箭子級垂直回收這類構型,小迎角下不同馬赫數壓心變化的范圍較大,在超聲速馬赫數2.0時壓心最靠前,其量值在0.2附近,跨聲速馬赫數0.95時全箭的壓心最靠后,位置在0.77附近;從馬赫數3.0開始,在小迎角下,隨著馬赫數下降,壓心變化呈先前移再后移最后再前移的變化趨勢;跨聲速和超聲速時壓心隨迎角的變化范圍較大,而在亞聲速壓心隨迎角的變化相對較小。

圖4 火箭子級垂直再入過程中軸向力特性曲線Fig.4 Characteristic curves of axial force in vertical reentry process of rocket sub-stage

圖5 火箭子級垂直再入過程中壓心特性曲線Fig.5 Characteristic curves of pressure center in vertical reentry process of rocket sub-stage
為進一步分析壓心隨馬赫數變化規律產生的原因,采用風洞試驗方法,將火箭子級上的柵格舵去掉,獲得了迎角2°和5°時有/無柵格舵構型全箭壓心隨馬赫數變化規律曲線,如圖6所示。可以看出,有/無柵格舵構型壓心隨馬赫數的變化規律相一致,壓心在不同馬赫數下變化較大的主要原因是箭體非規則平頭端面繞流引起,柵格舵的存在使得全箭的壓心有所后移,在亞聲速馬赫數0.6和超聲速馬赫數2.0以上,由于柵格舵的存在,使得壓心的移動量均在10%以上,跨聲速時柵格舵氣動效率有所降低,柵格舵導致的壓心后移量減小。

圖6 有/無柵格舵構型壓心隨馬赫數變化曲線對比Fig.6 Comparison of curves of pressure center vs Mach number with or without grid rudder configuration
圖7和圖8分別給出了倒飛狀態迎角2°和迎角5°不同馬赫數火箭底部迎風區域壓力系數Cp分布對比情況。可以看出,在亞跨聲速小迎角時,由于火箭子級倒飛狀態非規則平頭端面的影響,使得迎風區域和背風區域的箭體肩部均發生了大范圍的流動分離,火箭的尾翼處于大分離區域內,且隨著迎角的逐漸增大,迎風區域的分離區呈減小趨勢,而背風區域的分離區內的壓力有所增大,并與火箭尾翼相互作用,從而導致在端頭區域產生了向下的法向力貢獻;在跨聲速馬赫數0.95時,小迎角迎風區域肩部由于氣流的壓縮效應產生了較強的激波結構,迎風側非規則端面繞流產生的低壓區域范圍和強度均明顯高于背風側肩部繞流區域,而此處力臂相對較長,從而導致跨聲速時火箭箭體穩定性急劇增強,壓心位置急劇后移。在超聲速來流下,非規則迎風端頭區域產生了較強的脫體激波結構,氣流經過端頭肩部區域后仍為超聲速流動,肩部區域的分離區很小,而此時火箭尾翼和外露噴管為箭體產生升力的主要部件,從而導致超聲速時箭體自身的壓心位置較為靠前。
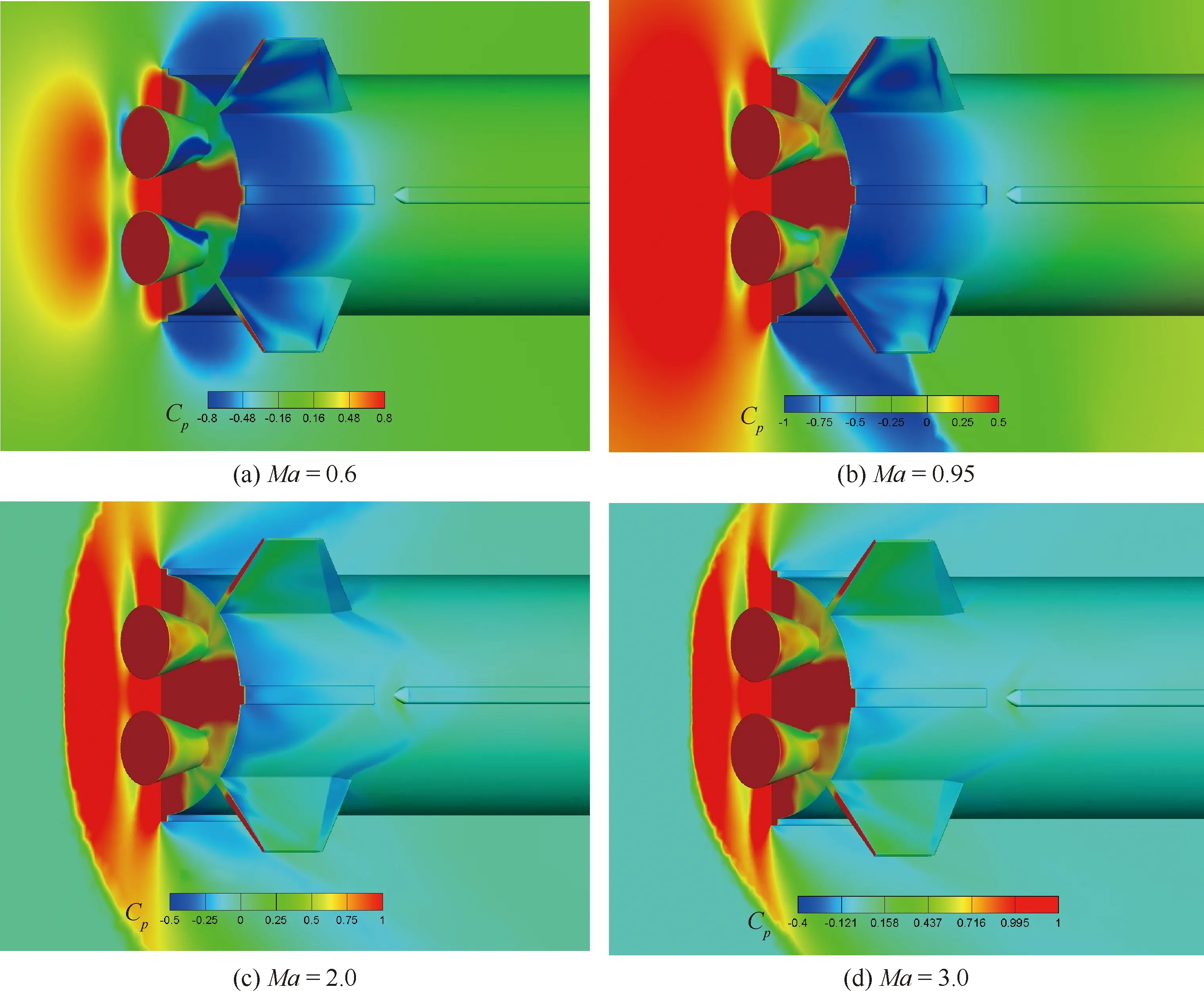
圖7 倒飛狀態迎角2°不同馬赫數火箭底部附近壓力分布對比Fig.7 Comparison of pressure distribution near rocket base at 2° angle of attack with different Mach number
圖8 倒飛狀態迎角5°不同馬赫數火箭底部附近壓力分布對比Fig.8 Comparison of pressure distribution near rocket base at 5° angle of attack with different Mach number
圖9給出了迎角5°不同馬赫數下迎風側柵格舵區域馬赫數分布云圖對比,可以看出,由于柵格舵為鈍前緣設計,使得第三臨界馬赫數[19]偏高,在馬赫數2.0時柵格舵內仍處于壅塞狀態,從而導致柵格舵的氣動效率降低,壓心有所前移。隨著來流馬赫數進一步增大,柵格舵內逐漸變成斜激波穿透狀態,柵格舵氣動效率有所增強,全箭的壓心后移,在亞聲速狀態,柵格內的氣流也較為通暢,使得柵格舵亞聲速下的氣動效率也較高。

圖9 迎角5°不同馬赫數迎風側柵格舵區域馬赫數分布對比Fig.9 Comparison of Mach number distribution in grid fins region at 5° angle attack
圖10給出了倒飛狀態馬赫數3.0迎角0°時火箭底部噴管附近的馬赫數分布云圖,可以看出,在超聲速流動條件下,火箭底部區域產生了強脫體激波結構,由于火箭底部區域外露噴管的影響,在不同外露發動機噴管之間形成了一定的“通道”效應,使得氣流進一步被壓縮,產生了局部的超聲速流動,由于強激波后的壓力較高,外露噴管區域的力臂較長,所以強脫體激波后微小的氣流擾動可能會對全箭的俯仰力矩產生一定的影響。
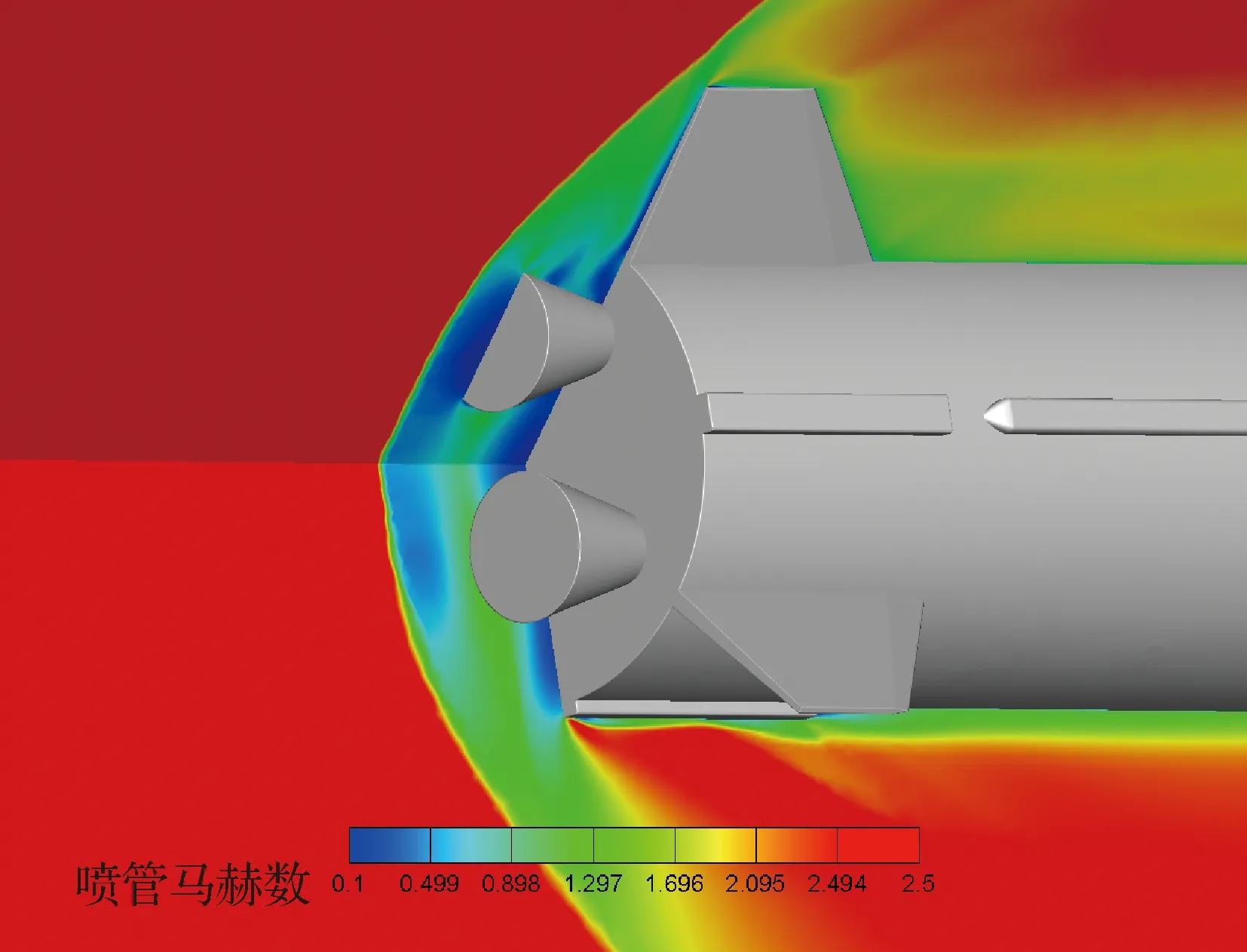
圖10 馬赫數3.0迎角0°噴管附近馬赫數分布Fig.10 Mach number distribution near nozzle at Ma=3.0, α= 0°
圖11給出了倒飛狀態馬赫數0.6迎角0°時火箭底部附近流線分布情況,可以看出,火箭子級再入過程中迎風區域非規則構型使得流動異常復雜,氣流經過大平頭端部區域產生較大的流動分離,分離區的大小和強度受來流影響明顯;同時,每個外露噴管區域會誘導拖出兩條明顯的分離渦結構,與肩部的分離流動、火箭尾翼相互作用,從而影響火箭子級再入氣動特性。
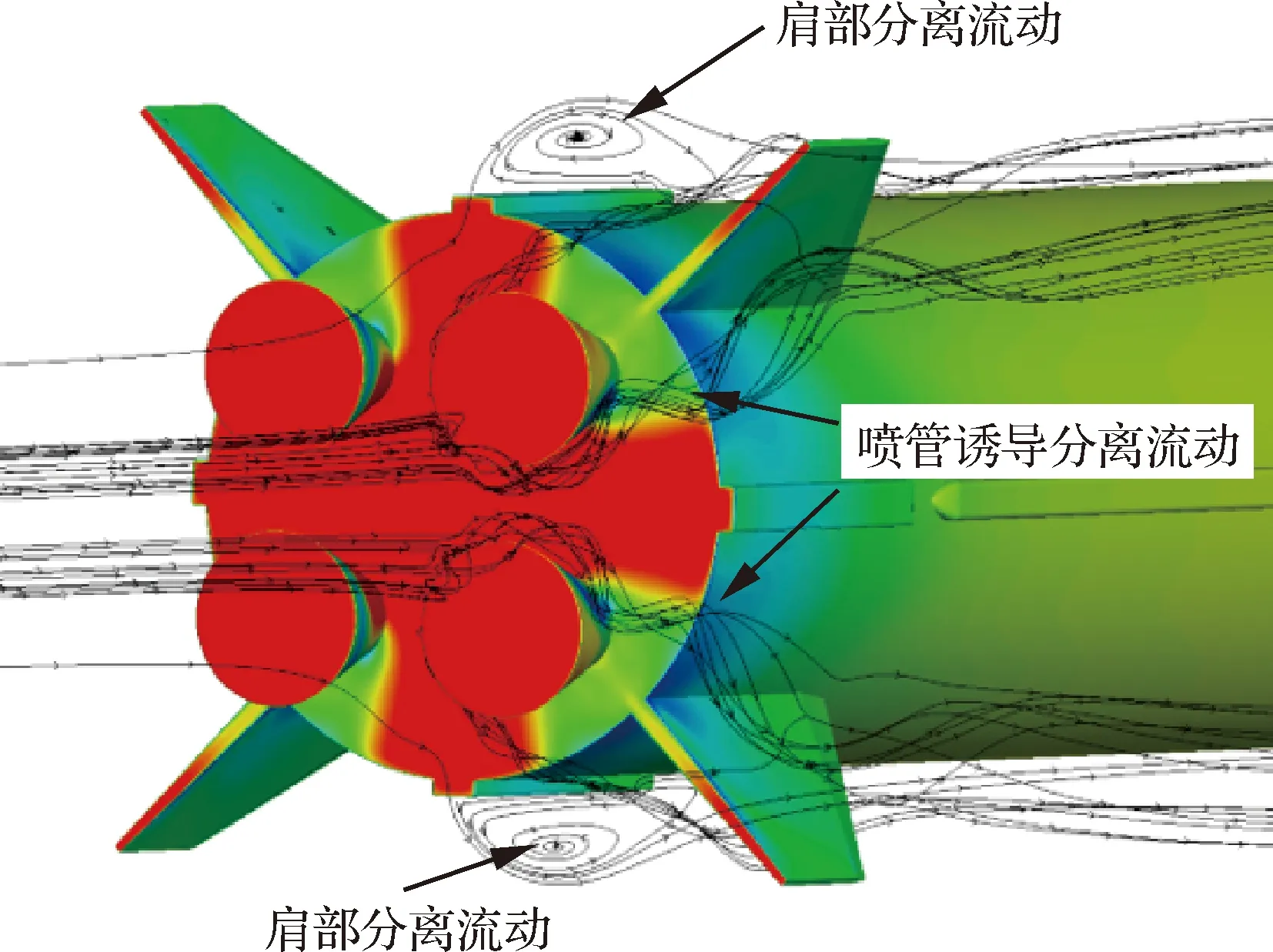
圖11 倒飛狀態馬赫數0.6迎角0°火箭底部 附近流線分布Fig.11 Streamline distribution near the base of rocket in inverted flight at Ma=0.6, α= 0°
3.2 發動機外露噴管和柵格舵影響
為了進一步量化發動機噴管及柵格舵對火箭子級垂直再入氣動特性的影響,在基準構型基礎上,取消發動機尾部外露噴管和柵格舵開展了風洞試驗研究,共對比分析了4種構型,分別對應無噴管+無柵格舵構型、有噴管+無柵格舵構型、無噴管+6×6柵格舵構型和有噴管+6×6柵格舵構型。
圖12給出了亞、跨、超聲速典型馬赫數下發動機外露噴管和柵格舵對垂直再入子級的法向力特性影響規律曲線,可以看出,發動機外露噴管和柵格舵上均會有一定的法向力產生,對應有噴管+6×6柵格舵構型的法向力系數最大,無噴管+無柵格舵構型的法向力系數最小,不同馬赫數下外露噴管和柵格舵對法向力的影響規律相一致,且外露噴管產生的法向力量值基本和6×6柵格舵產生的法向力量值基本相當。
圖13給出了亞、跨、超聲速典型馬赫數下發動機外露噴管和柵格舵對垂直再入子級的軸向力特性影響規律曲線,可以看出,不同馬赫數下,有噴管+無柵格舵構型的軸向力系數最低,無噴管+6×6柵格舵構型的軸向力系數最大,發動機外露噴管起到了一定的減阻效果,超聲速來流時減阻效果最明顯,降低了約0.16,約占總軸向力的9%;柵格舵在跨聲速階段由于流動壅塞,使得阻力增加明顯,超聲速馬赫數3.0時柵格舵的軸向力增量約為5%。

圖13 外露噴管和柵格舵對垂直再入子級軸向力特性影響Fig.13 Influence of exposed nozzle and grid fins on axial force characteristics of vertical reentry stage
發動機外露噴管上產生了較大的法向力,會對子級垂直再入過程中的穩定性產生一定影響,圖14給出了典型馬赫數下發動機外露噴管和柵格舵對垂直再入子級的俯仰力矩特性影響規律曲線,可以看出,火箭子級返回時底部區域外露的發動機尾噴管使得火箭子級產生了明顯的靜不穩定抬頭力矩的增量,對柵格舵上的穩定力矩起到抵消的作用。在馬赫數0.6,10°迎角以前,噴管產生的力矩變化量較柵格舵本體產生的力矩量值還大,需要引起注意。所以,在火箭子級垂直回收方案設計時,為了盡可能高地提升柵格舵的控制效率,建議火箭子級倒飛時外露發動機噴管區域要盡可能的小,從而降低噴管帶來的耦合不穩定力矩。

圖14 外露噴管和柵格舵對垂直再入子級俯仰力矩特性影響Fig.14 Influence of exposed nozzle and grid fins on pitching moment characteristics of vertical reentry stage
3.3 柵格舵控制舵效
柵格舵作為火箭子級垂直回收的重要氣動控制舵面,其控制能力將直接影響到子級回收控制方案的設計和落點的控制精度[20]。本節針對設計的火箭子級加裝4片呈“X”字布局的6×6弧形柵格舵的垂直回收氣動布局方案,開展了柵格舵控制舵效分析研究,柵格舵偏轉角度為-20°~+10°。
圖15給出了典型馬赫數下柵格舵偏轉對火箭子級垂直再入過程的俯仰控制舵效分析曲線,圖中dz表示俯仰舵偏角,可以看出,在整個分析范圍內,柵格舵的俯仰控制舵效均較高,大舵偏時柵格舵的控制效率略有降低。柵格舵正偏轉產生負的俯仰力矩變化量,柵格舵負偏轉產生正的俯仰力矩變化量。在亞聲速馬赫數0.6正舵偏、正迎角時,由于柵格舵當地局部迎角較大,出現了流動失速現象,使得柵格舵控制舵效略有降低。在跨聲速馬赫數0.95、±5°迎角范圍內縱向穩定性變化主要是火箭子級垂直再入過程非規則鈍頭體繞流導致,不同柵格舵偏轉角度下均存在明顯的穩定性變化。在馬赫數3.0時,帶柵格舵的火箭子級在8°迎角以內為靜不穩定狀態,在8°迎角以后為縱向靜穩定,無舵偏構型存在2個配平點,分別在0°迎角和9°迎角附近,其中0°附近的為靜不穩定配平點,9°附近為靜穩定配平點。
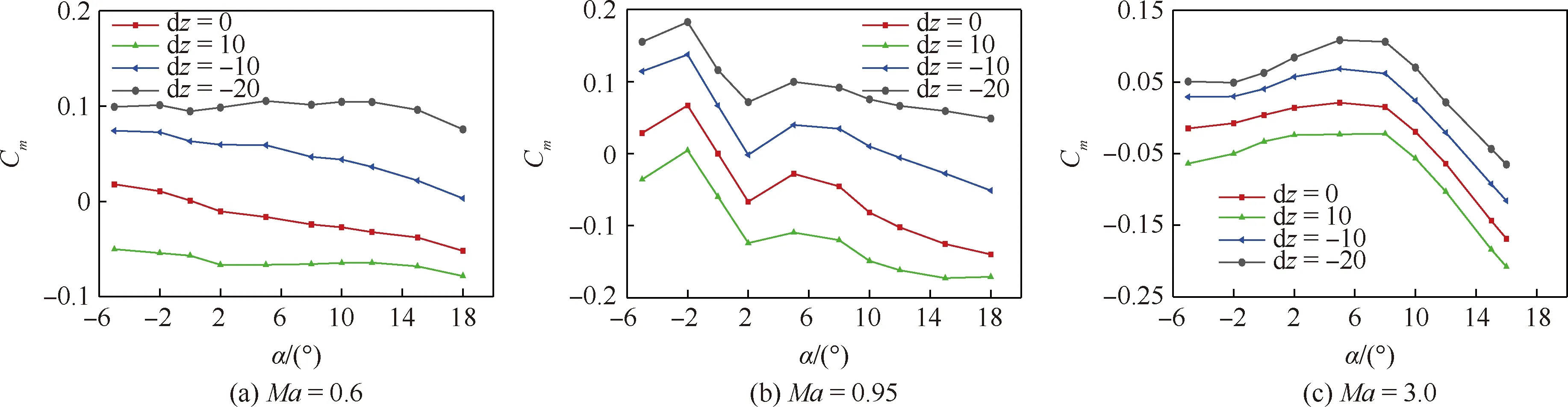
圖15 不同馬赫數下柵格舵控制舵效Fig.15 Control effect of grid fins at different Mach numbers
為進一步分析柵格舵對火箭子級再入過程中機動能力的影響,圖16給出了典型馬赫數下的柵格舵配平能力的分析曲線,圖中橫坐標為配平迎角αt,縱坐標為俯仰舵偏角δ。可以看出,在亞聲速馬赫數0.6時,由于全箭為靜穩定狀態,正迎角

圖16 不同馬赫數下柵格舵縱向配平特性Fig.16 Longitudinal trim characteristics of grid fins at different Mach numbers
飛行需要負的舵偏來滿足縱向配平要求,柵格舵俯仰操縱比較高,約為2.3,即舵面偏轉1°可拉起2.3°的迎角;跨聲速階段柵格舵的控制效率有所降低,全箭的俯仰操縱比約為0.8;超聲速馬赫數3.0時,在8°迎角范圍內全箭均為靜不穩定狀態,正迎角飛行需要正舵面偏轉來滿足配平的要求,±5° 柵格舵偏轉即可滿足8°迎角以內的飛行要求。
3.4 發動機噴管封堵位置影響
火箭子級垂直回收構型倒飛再入過程中,發動機噴管開口向前,屬于典型的變截面盲腔流動,此時傳統的發動機出口截面封堵的方式是否合適,需要開展研究。采用數值模擬手段,針對發動機迎風開口腔體噴管出口封堵和喉道封堵構型進行了研究,不同封堵位置如圖17所示。
圖18給出了來流迎角-2°~15°,馬赫數0.6、 1.2和3.0時,迎風噴管不同封堵位置對火箭子級法向力、軸向力和俯仰力矩特性影響規律曲線,可以看出,在亞聲速、跨聲速和超聲速來流條件下,不同發動機噴管封堵位置對火箭子級的法向力、軸向力和俯仰力矩影響均較小,喉道封堵使得迎風噴口內接近“死水區”流動,從而導致不同封堵位置下箭體肩部區域和迎風非規則端面區域的繞流特性基本一致。
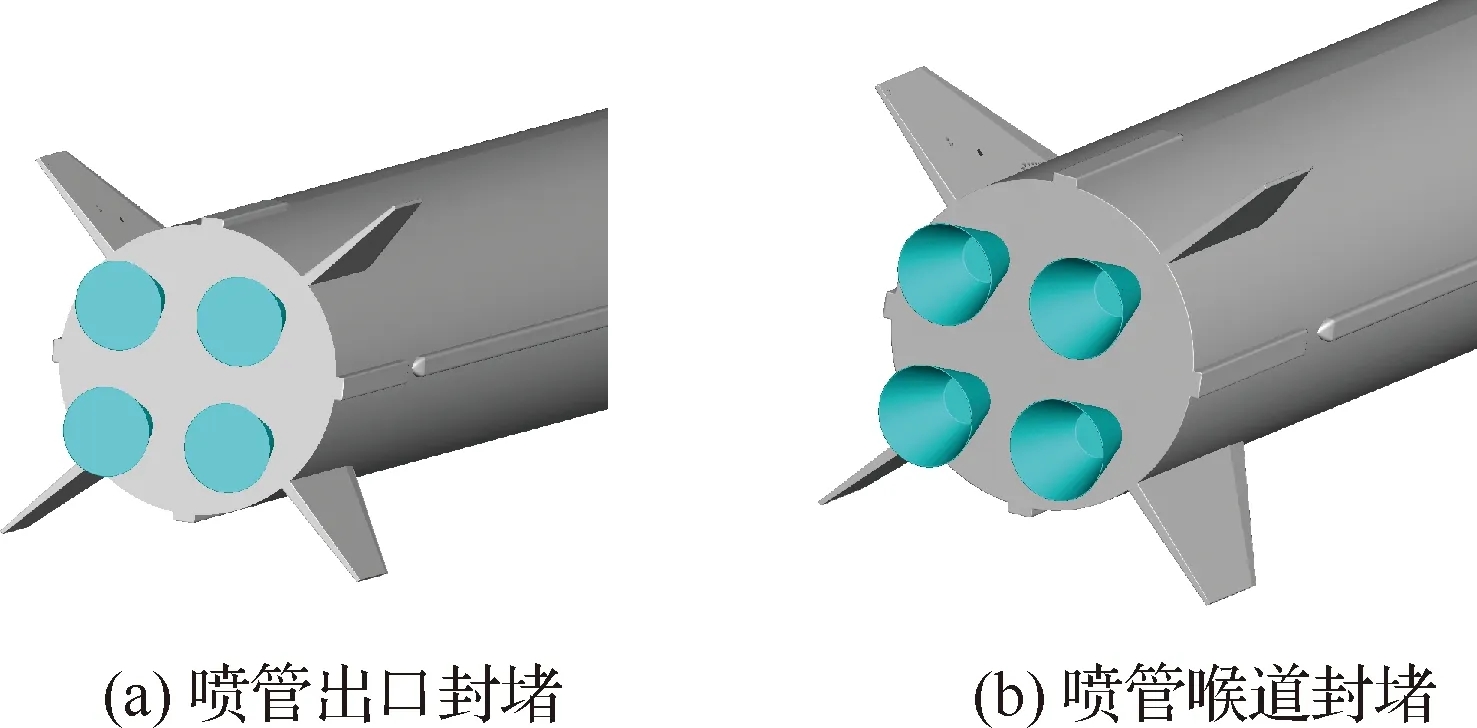
圖17 不同噴管封堵位置示意圖Fig.17 Schematic diagram of different nozzle plugging positions

圖18 噴管封堵位置對氣動特性影響曲線Fig.18 Influence curves of nozzle plugging positions on aerodynamic characteristics
4 結 論
采用風洞試驗結合數值仿真的方法,對火箭子級垂直回收構型氣動特性及非規則鈍頭體繞流流動進行了研究,獲得了發動機外露噴管和柵格舵對氣動特性的影響規律。主要研究結論有:
1) 帶柵格舵的火箭子級垂直回收構型氣動特性規律與常規流線體飛行器差異較大,主要體現在倒飛再入過程中非規則頭部區域帶來的復雜流動干擾上,肩部的大分離流動會與噴管誘導的分離渦相互作用,對預測方法提出了較高的要求與挑戰。
2) 在超聲速條件下火箭子級垂直回收構型的氣動阻力會一直處于較高的水平,在垂直回收方案設計時,需要充分評估權衡氣動減速與發動機反向噴流工作減速的效果和收益。
3) 垂直回收構型在不同馬赫數下的壓心變化范圍寬,在跨聲速馬赫數0.95時壓心最靠后,在0.77附近,在馬赫數2.0時壓心最靠前,在0.2 附近,柵格舵在整個分析范圍內控制舵效較高,亞聲速時的俯仰操縱比約為2.3。
4) 發動機外露噴管會對火箭子級的穩定性產生較大影響,其帶來的靜不穩定力矩量值與柵格舵提供的穩定控制力矩量值基本相當,所以在開展垂直回收方案設計時,建議盡量縮短發動機噴管的外露長度,減小帶來的耦合力矩干擾。
本文主要針對火箭子級倒飛氣動減速相關繞流特性進行了研究,未來將針對垂直回收過程面臨的發動機逆向噴流干擾、擺噴/柵格舵復合控制等關鍵氣動問題開展進一步的分析工作。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15