適用無人機的小型燃料電池控制方法
2021-03-27 02:18:12向乾張曉輝王正平劉莉
航空學報 2021年3期
關鍵詞:方法
向乾,張曉輝,王正平,劉莉
1. 北京理工大學 宇航學院,北京 100081 2. 北京理工大學 機電學院,北京 100081
燃料電池是一種將化學能直接轉化為電能的裝置,因其高效率和高能量密度等優點,燃料電池動力系統已經成為中低空電動無人機長航時應用需求背景下最具潛力的動力方案,燃料電池無人機也逐步成為國內外的研究熱點[1-7]。無人機飛行過程中,環境溫度、氣壓、氧含量以及濕度動態變化,將影響燃料電池的工作狀態,是燃料電池控制必須考慮的問題[8-10]。在燃料電池加載過程中,由于負載動態變化、系統擾動等因素引起的燃料電池溫度與膜水含量的變化也會影響其輸出性能和使命壽命,所以有效的溫度控制與水管理是保證燃料電池高效、高可靠性的關鍵技術[11-14]。
Hu等[15]認為提高工作溫度有助于維持質子交換膜的高離子導電性,從而提高燃料電池輸出性能。但過高的工作溫度又會導致膜的降解,所以必須將燃料電池工作溫度控制在合理值。膜水含量是影響燃料電池性能的重要參數之一,直接決定質子交換膜的離子導電性。膜水含量過低會導致燃料電池性能的衰減,膜電極(Membrane Electrode Assembly, MEA)上液態水太多又會引發水淹故障,對燃料電池產生不可逆的損害,所以必須進行合理的水管理。
目前,已有學者對燃料電池的溫度控制與水管理開展了研究,如韓國全南大學的Ou等[16]針對2 kW燃料電池,考慮溫度和氫氣相對濕度兩個控制變量,提出了模糊增量控制方法,通過試驗驗證了方法的有效性。電子科技大學的謝雨岑等[17]針對10 kW燃料電池,基于變論域模糊增量控制方法開展了溫度控制的仿真試驗,分析了變論域模糊控制器的作用和有效性;中科院大連物化所的Hao等[18]使用線性掃描伏安法開展試驗,討論了燃料電池水擴散的滯后現象,定量分析了膜的最大水容量。然而以上研究只側重于燃料電池溫度、濕度、膜水含量其中一方面,而整個燃料電池系統的高效健康工作需要同時考慮多個方面。目前為止,尚未見到針對小型無人機配備的小功率燃料電池,同時考慮溫度與膜水含量兩個變量的控制方法研究。
同時針對燃料電池溫度和膜水含量兩個狀態變量進行控制,提出了前饋型模糊PID (Feedforward Fuzzy PID, FFPID)控制方案與傳統模糊PID(Conventional Fuzzy PID, CFPID)和PID對比,以及膜水含量的安時積分門限控制方法。以小型空冷型開放陰極的質子交換膜燃料電池(Proton Exchange Membrane Fuel Cell, PEMFC)為被控對象,建立了電堆溫度場動態模型以及膜電極的水平衡模型,確立了直接控制參量,搭建PEMFC測控試驗平臺,開展PEMFC動態特性試驗,驗證了所提方法的有效性。
1 電堆溫度場與水平衡模型
1.1 電堆溫度場動態模型
根據能量守恒定律建立了PEMFC電堆的熱力學模型[19-20],總體熱模型平衡方程表達為
(1)

電化學反應總功率可以表達為
(2)
式中:ΔH為氫氣的燃燒焓;n為電池片數;Ist為電堆電流;F為法拉第常數。
輸出功率Pst為電堆電壓Vst和電堆電流Ist的乘積,表達式為
Pst=VstIst
(3)
(4)
式中:α為經驗系數,代表驅動風扇的PWM波占空比Dfan與空氣流速的關系,α與空氣密度ρair和無人機飛行高度有關;Ain為風扇橫截面積;CP,air為空氣比熱容;Tamb為環境溫度。
環境溫度Tamb和空氣密度ρair主要受飛機所處地理位置和飛行高度h的影響。
Tamb=f1(lon,lat,h)
(5)
ρair=f2(Pair,Tamb)
(6)
式中:lon為經度;lat為緯度;Pair為空氣氣壓;f1(·)和f2(·)為相應的大氣環境函數。

(7)
(8)
式中:Dvalve為陽極排氣閥開閉占空比;qH2為氫氣平均流量;ρH2為氫氣密度;CP,H2為氫氣比熱容;Tout,H2和Tin,H2分別為陽極排氣口和進氣口的溫度;ton和toff為陽極排氣閥開啟和關閉時間。

1.2 MEA的水平衡模型
根據質量守恒定律建立了MEA的水平衡模型[18],總體的質量守恒方程表達為
mH2O,cap=mH2O,in+mH2O,gen-mH2O,out
(9)
式中:mH2O,cap為每個排氣循環內MEA含水的質量;mH2O,in為每個排氣循環內由進氣帶入PEMFC的水的質量;mH2O,gen為生成水的質量;mH2O,out為排出水的質量。
以兩個排氣之間的間隔為一個循環,每個排氣循環內,進入PEMFC系統的水主要是陰極空氣和陽極氫氣中帶入的水蒸氣(假設兩種進氣都不含液態水),具體表達式為
mH2O,in=mH2O,in,ca+mH2O,in,an
(10)
(11)
(12)
(13)
內部電化學反應生成的水為
(14)
式中:mH2O,in,ca和mH2O,in,an為陰陽極進入系統水蒸氣質量;nH2O,in,ca為水的物質的量;MH2O為水的摩爾質量;Vin,ca為陰極進氣體積;Ptotal,ca和Ptotal,an為陰陽極進氣總壓;Rh,in,ca和Rh,in,an為陰陽極進氣相對濕度;Psat,ca和Psat,an為陰陽極飽和蒸氣壓;R為摩爾氣體常數;T為水蒸氣溫度。
對于空冷型開放陰極的PEMFC,陰極氣壓為空氣壓力,且隨飛行高度h變化,即
(15)
式中:P0為海平面標準氣壓;T0為海平面氣溫;β為溫度隨高度的變化率;g為重力加速度。
PEMFC系統排出的水同時包含陰極的水和陽極的水,其中陰極的水隨空氣以水蒸氣形式排出,陽極的水同時包含氣態水和液態水,通過控制陽極排氣閥排出,具體表達式為
mH2O,out=mH2O,out,an+mH2O,out,ca
(16)
(17)
mH2O,out,an,liq
(18)
式中:mH2O,out,an,liq為陽極排出的液態水的質量,與陽極排氣閥開閉占空比Dvalve呈正相關關系。
將式(10)、式(14)和式(16)代入式(9)即可以計算出留在MEA上水的質量。MEA上水含量過高會引發水淹故障,阻礙氣體擴散層和流道上的反應氣體到達反應點,催化劑也因水的覆蓋降低活性面積,將對電堆產生不可逆的損害[21]。
由MEA的水平衡模型可知,膜水含量與電堆電流Ist、運行時間t、進排氣的相對濕度以及陽極排氣閥開閉占空比Dvalve有關。為了避免發生水淹故障,結合了電堆電流Ist,對陽極排氣閥開閉占空比Dvalve采取調控。
2 溫度控制與水管理
2.1 溫度控制
溫度是影響PEMFC性能最重要的參數之一。溫度過高易發生質子交換膜的降解,使PEMFC損毀,低溫又會降低PEMFC的輸出性能。因此必須控制溫度,使得PEMFC以高功率輸出,又不至于損壞質子交換膜。本文提出了FFPID控制器與CFPID控制器和PID控制器進行對比。
2.1.1 PID控制器
PID控制器因其結構簡單的優點獲得了廣泛的應用。如圖1所示,Tref為燃料電池目標溫度,選擇PID控制器進行溫度控制,表達式為
(19)

圖1 PID控制結構Fig.1 PID control structure
2.1.2 CFPID控制器
PEMFC是一個非線性、時變性、強耦合的復雜動態系統,其運行過程存在大量隨機干擾[22]。PID控制器難以使PEMFC系統維持在相對穩定的狀態,CFPID控制器具有魯棒性強,不依賴精確模型等優點,適用于PEMFC的熱管理。
針對PEMFC的熱管理,設計了一種模糊PID控制器,如圖2所示。該控制器由模糊增量控制器和PID控制器兩者組成,PID控制器對系統產生實際的影響,模糊增量控制器根據誤差和誤差變化率的反饋對PID控制器進行實時調參。

圖2 傳統模糊PID控制結構Fig.2 CFPID control structure
首先,對清晰量進行模糊化。根據試驗經驗和理論分析,確定了該模糊控制器的輸入量溫度誤差和溫度誤差變化率的模糊論域分別為[-10, 2]和[-4, 4],隸屬度函數采用分辨率高的三角型,輸出量比例系數kp、積分系數ki及微分系數kd,模糊論域分別為[0, 10]、[0, 4]和[0, 0.3],隸屬度函數采用穩定性好的高斯型,以上參數在論域中均被劃分為7個模糊子集{vs,s,ls,m,lb,b,vb},具體隸屬度函數如圖3和圖4所示。
其次,建立模糊控制規則。模糊控制規則是

圖3 傳統模糊PID控制輸入量的隸屬度函數Fig.3 Input membership function of CFPID

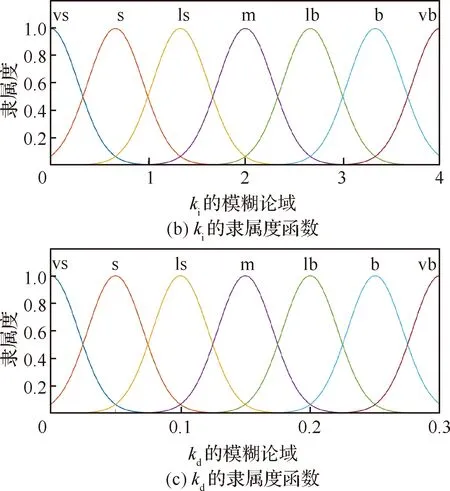
圖4 傳統模糊PID控制輸出量的隸屬度函數Fig.4 Output membership function of CFPID
設計模糊控制器的核心。根據控制經驗,按照AND-OR邏輯推理,得到49條IF-THEN表達形式的模糊規則,具體的模糊規則表如表1所示。
最后,由模糊控制規則完成模糊推理后,需要將獲得的模糊集合轉換成能直接用于控制的精確輸出量。為了計算方便,解模糊化過程都采用了較為簡便且精確度較高的重心法來得到模糊控制器的精確控制量。
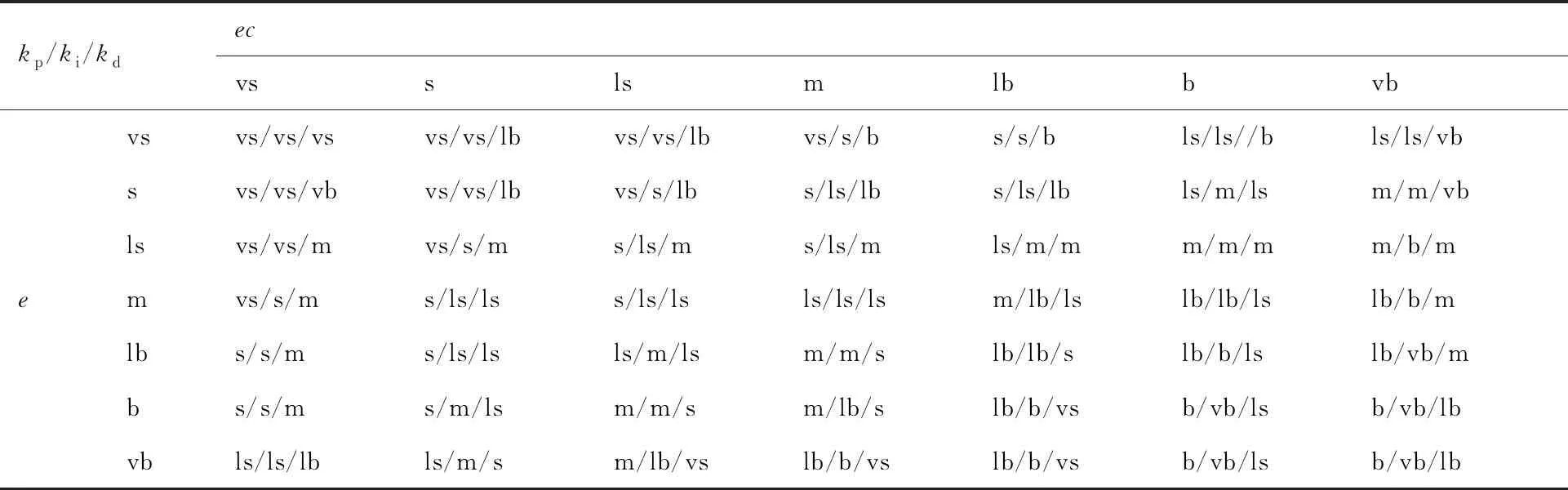
表1 傳統模糊PID模糊控制規則Table 1 Fuzzy control rules of CFPID
2.1.3 FFPID控制器
雖然CFPID適用于非線性系統的控制,但觀察了其控制效果后,發現也不能很好的約束被控變量。為了盡量避免質子交換膜在高溫的工作條件下運行,又能保證PEMFC以高性能輸出,本文提出了一種FFPID控制。如圖5所示,FFPID結構與CFPID相似,區別在模糊控制器部分增加了一個輸入量Tref,形成一個前饋環節。
輸入量Tref的模糊論域為[43, 47],隸屬度函數結構采用三角型,在論域中被劃分為3個模糊子集{l, m, h},其余的輸入量和輸出量的隸屬度函數與CFPID控制器一致,具體的隸屬度函數如圖6和圖7所示。根據控制過程經驗[23-24],按照AND-OR的邏輯,得到了具有if-then表達形式的模糊規則,建立了模糊規則表,如表2所示。當目標溫度為“高(h)”,溫差為“極大(vb)”,溫度變化率為“極大(vb)”時,此時PEMFC處于大功率輸出狀態,產熱量大,溫度升高較快,需要快速降溫,避免溫度過高,所以設定比例系數為“大(b)”,積分系數為“極大(vb)”,在該狀態下溫度易發生振蕩,所以設定微分系數為“略大(lb)”,以改善動態特性;當目標溫度為“低(l)”,溫差為“中(m)”,溫度變化率也為“中(m)”時,此時PEMFC的產熱低,溫度趨穩,風扇不需要大幅調整,所以設定比例系數為“略小(ls)”,積分系數為“小(s)”,為了避免受噪聲干擾,將微分系數設為“略小(ls)”。
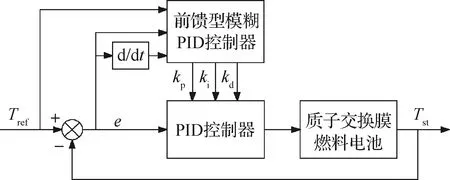
圖5 前饋型模糊PID控制結構Fig.5 FFPID control structure


圖6 前饋型模糊PID控制輸入量的隸屬度函數Fig.6 Input membership function of FFPID
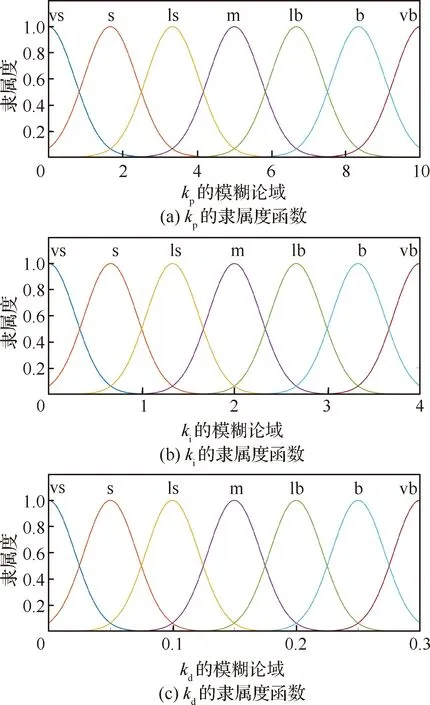
圖7 前饋型模糊PID控制輸出量的隸屬度函數Fig.7 Output membership function of FFPID
2.2 水管理

在此基礎上,設計了定時排水和安時積分門限排水兩種方法。

表2 前饋型模糊PID模糊控制規則表Table 2 Fuzzy control rules of FFPID
2.2.1 定時排水方法
定時排水方法主要考慮到水的生成是一個積累過程,以固定的時間間隔15 s打開陽極排氣閥,開啟0.25 s排水排氣,然后關閉排水閥,這樣可以達到排除MEA上多余水分的目的。
但在試驗過程中,定時排水方法存在一定的不足,因為PEMFC運行初期MEA上膜水含量并不多,所以無需頻繁地打開陽極排氣閥。
2.2.2 安時積分門限排水方法

表3 安時積分門限控制策略Table 3 Ampere-hour integral threshold control policy
3 燃料電池系統控制試驗
3.1 試驗系統建立
PEMFC試驗系統如圖8所示,該系統由燃料電池堆、氫氣瓶、流量計、陽極排氣閥、電流電壓傳感器、風扇、電子負載、FC控制器及上位機組成,FC控制器為STM32開發板,其中燃料電池堆的PEMFC運行過程中,風扇驅動冷空氣不斷地流過電池堆,PEMFC控制器將電堆溫度保持在設定值。陽極排氣閥開啟使氫氣排到環境中,同時帶走聚集在陽極上的液態水。
認為PEMFC的最佳運行溫度與電堆電流Ist有關[20],具體關系為
Tref=aIst+b
(20)
式中:a和b為經驗參數,取a為1,b為40,由生產廠家提供。
試驗中,室內環境溫度為25 ℃,空氣濕度為30%,電子負載給PEMFC定電流加載如圖9所示的電流剖面。在加載初期,每增加1 A持續50 s 的階梯式加載,達到7 A后再逐步減小電流,這樣的設計考慮了PEMFC的健康工作條件。K型熱電偶和電流電壓傳感器實時地將電堆溫度Tst和電堆電流Ist反饋給嵌入控制算法的STM32開發板,STM32開發板計算出驅動風扇PWM波的占空比Dfan和陽極排氣閥開閉占空比Dvalve,由風扇執行散熱,陽極排氣閥執行排氣排水。流量計實時測量進氣流量,并通過STM32開發板的串口將數據發送至上位機保存。試驗之前必須對PEMFC系統采取靜置4 h處理,以盡量減弱上一次試驗產生的余溫和水對本次試驗的影響。

表4 燃料電池基本參數Table 4 Basic parameters of fuel cell

圖9 電流剖面Fig.9 Current profile
3.2 試驗結果
3.2.1 溫度控制
針對提出的前饋型模糊PID、傳統模糊PID和PID控制方法開展了對比試驗,試驗結果如圖10所示。其中圖10(a)是溫度控制試驗的整體結果,可見由于啟動過程產熱量較小,需要一個熱量積累過程才能達到目標溫度,3種方法基本都能實現產熱量較高時的溫度控制,能夠維持大功率時的溫度穩定,防止了質子交換膜的高溫降解。
圖10(b)為PEMFC啟動過程溫度控制的局部放大圖,可見前饋型模糊PID相比PID方法減少了7%的調節時間,與傳統模糊PID相當,具體調節時間如表5所示。而3種控制方法的超調量差異不大,穩態誤差基本一致。
圖10(c)為目標溫度從47 ℃下調至46 ℃的控制過程局部放大圖,此時PEMFC功率依然較大,產熱速率較快,雖然3種控制方法溫度起點不一致,但三者的控制效果沒有明顯差異,都能夠穩定地跟蹤目標溫度的變化。
圖10(d)為目標溫度從46 ℃下調至45 ℃的控制過程局部放大圖,此時PEMFC功率進一步降低,產熱速率減小,前饋型模糊PID方法相比其他兩種方法調節時間優勢不大,但對超調量的抑制優勢明顯,3種方法的超調量如表5所示,前饋型模糊PID的超調量僅為PID方法的34%,為傳統模糊PID方法的43%。3種方法下的電堆溫度都在目標溫度以下,該現象是由于電堆產熱速率減小所致。相比之下,所提前饋型模糊PID能夠感知PEMFC產熱速率的變化,提前調整自身的控制量,避免造成過大超調。
綜上,PEMFC電流逐漸增大的啟動過程,需要較長時間的熱量積累過程,所提前饋型模糊PID方法能夠較快地達到目標溫度;PEMFC大電流運行時,3種控制方法基本都能實現PEMFC溫度控制,避免電堆溫度持續升高,保護質子交換膜不受高溫影響發生降解;在PEMFC電流持續減小時,燃料電堆產熱速率隨之降低,所提前饋型模糊PID能夠有效地感知產熱速率的變化,對超調量的抑制效果具有明顯優勢,能夠使PEMFC工作溫度貼近最佳工作溫度,既提高了PEMFC性能,又兼顧了健康使用條件。

表5 3種控制方法溫度控制過程中的動態特性指標
3.2.2 水管理
針對提出的安時積分門限排水方法與定時排水方法開展了一系列對比試驗,試驗結果如圖11所示。2次試驗都基于相同的前饋型模糊PID溫控方法,采用所設計的兩種水管理方法。青色曲線為按照相同時間間隔排水的定時排水方法,紅色曲線為安時積分門限排水方法。在PEMFC運行初期,安時積分門限排水方法控制下的PEMFC電堆溫度始終略高于定時排水方法,這有助于PEMFC快速追蹤目標溫度,使PEMFC以更快的速度達到正常工作狀態。在整個試驗周期內,安時積分門限排水方法使PEMFC的平均電堆溫度提高了0.3 ℃,其主要原因是定時排水方法比安時積分門限排水方法多排出了3 L氫氣,占定時排水方法排出氫氣的15%,如表6所示。
這部分氫氣在電堆內吸收了熱量,沒有參加電化學反應就被排出,直接造成了電堆的熱量損失和氫耗量上升。溫度的提升會直接影響輸出性能,如圖12所示,采用安時積分門限排水方法的輸出電壓在啟動初期有所提升,后期逐漸平穩,總體來看,兩條電壓曲線區別不大,對輸出性能提升貢獻有限。整個運行階段,未發生電壓驟減、輸出性能下降等現象,證明兩種排水方案都能有效避免水淹故障發生。
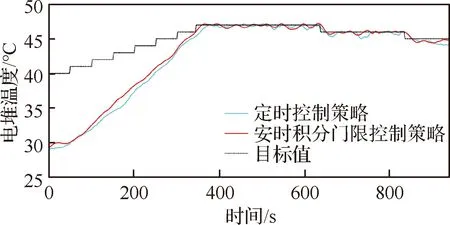
圖11 水管理對溫度的影響Fig.11 Impact of water management on temperature

表6 2種排水方案的氫耗量比較
綜上可知,安時積分門限排水方法既減少了氫耗量,提高了燃料經濟性,又兼顧了電堆健康使用條件,還提升了啟動初期的輸出電壓,但對全時段的輸出性能提升有限。所以在PEMFC面臨冷啟動時,適當地減少陽極排氣閥的開啟頻率有助于快速提高性能。

圖12 水管理對輸出性能的影響Fig.12 Impact of water management on output performance
4 結 論
1) 3種溫度控制方法都能防止PEMFC溫度過高,保證PEMFC處于健康的工作狀態。所提的FFPID控制方法能夠感知到目標溫度的變化,及時調整自身參數,以適應PEMFC在不同工況下的產熱速率,將溫度控制在目標值。與之對比的CFPID與PID控制方法,在PEMFC處于產熱速率低的小電流工況下,更易發生明顯的超調現象,使電堆溫度過低,難以在短時間內跟蹤上目標值,造成輸出性能下降。
2) 2種排水方案都能及時排出多余的水分,避免PEMFC發生水淹。但在PEMFC啟動初期,陽極MEA上還未產生液態水聚集,定時排水方法過多的開啟陽極排氣閥門,沒有起到排水的作用,反而導致熱量隨氫氣排出,既損失了熱量,又浪費了氫氣。提出的安時積分門限排水方法,減少了PEMFC啟動初期多余的排氣動作,可使電堆溫度快速升高,以盡快地進入高效工作狀態,相比定時排水方法減少了15%氫耗量,提高了燃料經濟性,有利于PEMFC無人機長航時需求。
3) PEMFC電堆升溫控制的前提是自身的產熱量高于散熱量,否則電堆溫度就會持續下降,無法穩定在目標值。無人機應用背景下,高空高度增加環境溫度降低,將加大電堆與環境之間的熱交換,若要將電堆溫度控制在較高值,單靠電堆自身產熱已不現實,所以必須為電堆提供外部增溫系統,提高局部環境溫度,減少散熱,補償環境低溫導致的熱量損失。另一方面,為了進一步減少排氣過程的氫耗量,以增加無人機航時,可以深入研究水在MEA中的擴散情況,建立更精準的水平衡模型,設計更高效節能的排水方案,以減少陽極排氣閥的排放,節省氫氣。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56