面向電動飛機應用的不同葉尖螺旋槳噪聲特性
2021-03-27 02:17:58劉遠強王艷冰項松王夢琪
航空學報 2021年3期
劉遠強,王艷冰,項松,王夢琪
1. 沈陽航空航天大學 航空宇航學院,沈陽 110136 2. 遼寧通用航空研究院,沈陽 110136 3. 遼寧銳翔通用飛機制造有限公司,沈陽 110136 4. 沈陽航空航天大學 機電工程學院,沈陽 110136
通用航空產業是國家戰略新興產業,是建設交通強國的重要組成部分,是民用航空產業發展的重要環節。隨著國民收入的穩步提高,消費理念的逐年提升將促使通用航空市場迎來空前發展。電動飛機研發屬于通用航空領域新的技術藍海,由于電動飛機具有零排放、低噪音、運營成本低廉且維護方便等優點,近年來在全球興起了相關技術研究熱潮,目前有240多個在研電推進飛機項目,就研發水平而言,國內外各研究機構和企業均處于起步階段[1-4]。開展新能源電動飛機相關核心技術攻關與自主知識產權產品研發是促進學科建設、加快科技成果轉化、提升新型飛行器國際競爭力的關鍵要素。
傳統通用飛機大多采用螺旋槳作為動力裝置,具有低油耗、高效率、易操作、氣動特性好等優點[5-7],但螺旋槳和發動機在高速轉動過程中會產生較大噪聲,影響通航飛機的駕駛體驗。由于傳統油動螺旋槳飛機的發動機噪聲較大且難控制,因此應當同時對發動機和螺旋槳進行降噪以降低飛機整體噪聲水平。靜音是電動飛機的典型特征之一,相比于油動飛機,電動飛機的推進系統由電機、控制器與螺旋槳構成,其噪聲絕大部分來源于螺旋槳,低噪聲螺旋槳在電動飛機上的應用有助于維持其靜音特征并提升乘坐的舒適性,控制好螺旋槳噪聲對于電動飛機的實用與推廣具有重要意義。
目前,國內外眾多學者在螺旋槳試驗和噪聲特性方面開展了較豐富的研究,龔喜盈等[8]對高空飛艇螺旋槳進行了試驗,設計組建的高空螺旋槳車載試驗測控系統具有較好的準確性。項松等[9]提出一種高效率的螺旋槳設計方法,設計出通用飛機在爬升狀態下和巡航狀態下的螺旋槳,用風洞試驗證明了其有效性。劉遠強等[10]對某型電動飛機螺旋進行了數值模擬和螺旋槳縮比試驗,可為螺旋槳設計提供指導。Wisniewski等[11]分析了槳葉參數對螺旋槳氣動數據性能和氣動噪聲的影響。王陽等[12]將非結構網格旋翼流場CFD(Computational Fluid Dynamics)計算方法與基于Fowcs Williams-Hawkings(FW-H)和Kirchhoff方程的聲學方法相結合,計算了螺旋槳氣動噪聲并分析了螺旋槳厚度噪聲、載荷噪聲和四極子噪聲的特性。伍文華等[13]采用計算流體力學方法,運用Fluent軟件和大渦模型(Large Eddy Simulation,LES)數值模擬了某軸流風扇的氣動噪聲,分析了噪聲產生的機理,驗證了CFD的正確性。Kingan和Parry[14]利用螺旋槳的反向旋轉效應研究了螺旋槳槳葉掃略增強或降低的噪聲輻射和利用掃頻控制噪聲的方法。Sakamoto和Kamiirisa[15]基于半經驗的黏性CFD方法對近場螺旋槳空化噪聲及其模型進行預測,并通過了試驗驗證。劉沛清等[16]對低雷諾數螺旋槳氣動噪聲特性進行了實驗研究,為尋求降低螺旋槳氣動噪聲的方法提供了思路。Pereda Albarr-án等[17]利用多學科初步飛機設計和優化工具MICADO對小型電動飛機進行了噪聲評估與設計。Samokhin[18]通過一種半經驗的方法對螺旋槳的噪聲進行了估算并與試驗結果進行了對比,驗證了方法的準確性。艾延廷等[19]開展了某型螺旋槳飛機氣動噪聲降噪研究,采用FW-H模型、非定常滑移網格及大渦模擬方法獲得了氣動噪聲頻譜特征;通過地面遠場噪聲試驗得到了螺旋槳在3種轉速下的氣動噪聲頻域特性和聲壓強度分布規律。曹云飛等[20]提出了一種基于小波濾波和三參數正弦擬合法的最小數據波動噪聲數據選取方法,提高了噪聲模型的辨識精度。但以上工作均未涉及螺旋槳槳尖形狀對噪聲特性的影響分析。
螺旋槳噪聲作為電動飛機噪聲的主要來源,控制好此部分即可很好地降低整體噪聲,有利于進一步提升電動飛機安靜環保的優勢。為更合理地選取電動飛機螺旋槳,分析不同螺旋槳槳尖形狀特征對噪聲的影響,本文設計并創建平直槳尖、尖型槳尖和后掠槳尖3種最典型槳尖形狀螺旋槳的模型,采用LES模型對3款不同槳尖形狀的螺旋槳模型開展氣動噪聲計算,以期獲得在巡航轉速和爬升轉速下螺旋槳一階頻率附近的噪聲聲壓值。制造螺旋槳風洞試驗實體模型,在空氣動力研究院低速增壓FL-9風洞中分別對3種不同槳尖形狀的螺旋槳進行氣動噪聲測量試驗,獲得不同槳尖形狀的氣動噪聲特性,并將大渦模擬仿真計算與風洞試驗數據進行對比。
1 計算模型構造
根據螺旋槳設計理論設計得出平直槳尖、尖型槳尖和后掠槳尖螺旋槳,3款螺旋槳各展向站位的弦長和槳葉角相同。通過創成式曲面造型技術構建通用飛機螺旋槳的CATIA模型,槳葉數為2,直徑為960 mm,平直槳尖、尖型槳尖和后掠槳尖形狀螺旋槳CATIA模型如圖1所示。
2 大渦模擬理論
2.1 控制方程
LES通過湍流瞬時運動量的分解將湍流的大渦和小渦分離開,直接數值計算大尺度湍流運動并利用運動模型模擬小尺度湍流運動。大渦模擬的控制方程即濾波后的Navier-Stokes方程為
(1)
(2)
式中:t為時間;ρ為流體密度,當流體不可壓縮時,?ρ/?t=0;xi和xj為位置分量;ui和uj為速度分量;上標—代表取平均值;p為壓力;μ為運動黏度系數。
2.2 亞格子尺度模型
(3)


圖1 3種螺旋槳CATIA模型Fig.1 CATIA model of three propellers
(4)
(5)
(6)
Δf=V1/3
(7)
式中:Ck為模型常數;ksgs為亞格子尺度動能;Δf為過濾尺寸;V為計算單元的體積。

(8)
通過求解輸運方程得到ksgs:
(9)
式中:Cε為模型常數。
2.3 計算模型
為使數值模擬仿真結果更好地與后續將開展的螺旋槳風洞試驗進行對比和結果分析,參照平直噪聲風洞試驗的接收傳聲器布置,計算模型將接收點設置在槳葉旋轉平面距離槳轂中心一倍距離(960 mm)的正下方,位置見圖2,3種螺旋槳設定為在來流風速30 m/s情況下的巡航轉速2 700 r/min 和爬升轉速3 900 r/min。
采用ANSYS MESHING軟件對整體模型劃分混合網格,通過滑移網格處理螺旋槳旋轉區域,旋轉域采用四面體網格,遠域采用規則六面體網格,如圖3所示,網格數量約為500萬。
基于混合網格并采用有限體積法,選用非定常求解器,壓力隱式計算,離散格式為三階,湍流模型采用大渦模型,壓力插值格式為PRESTO!,亞格子渦黏系數中的模型常數修正為Cs=0.1。時間步長Δt=1×10-6,迭代步數N=500,最大頻率范圍為Fmax=1/(2Δt)=5×105Hz;流場發展時間T=ΔtN=0.000 5 s。

圖2 螺旋槳試驗模型Fig.2 Propeller test model
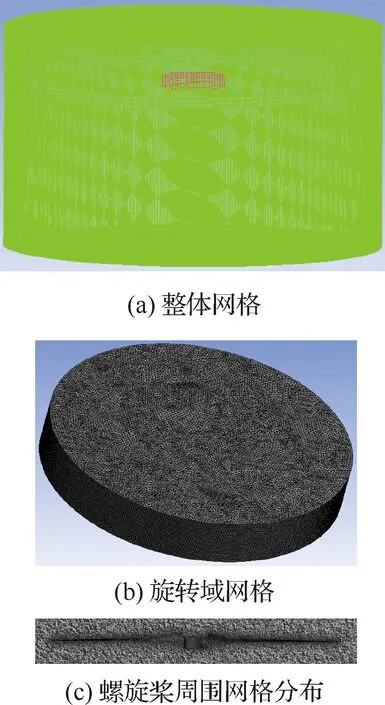
圖3 螺旋槳整體網格結構Fig.3 Propeller overall grid structure
2.4 計算結果
大渦模擬計算結束后,開啟Lighthill聲學模型進行螺旋槳噪聲計算,噪聲源接收點在螺旋槳正下方,螺旋槳巡航和爬升轉速分別為2 700 r/min和3 900 r/min,來流風速30 m/s,計算完畢后,通過快速傅里葉分析分析得到噪聲接收點的噪聲頻譜圖。
旋轉機械噪聲的頻率f為
(10)
式中:n為螺旋槳轉速;z為螺旋槳葉片數,z= 2;i為頻率階數。
螺旋槳在巡航狀態和爬升狀態下的一階頻率為90 Hz和130 Hz。表1和表2分別為平直槳尖、尖型槳尖和后掠槳尖螺旋槳在巡航狀態和爬升狀態下一階頻率附近的噪聲聲壓仿真值。
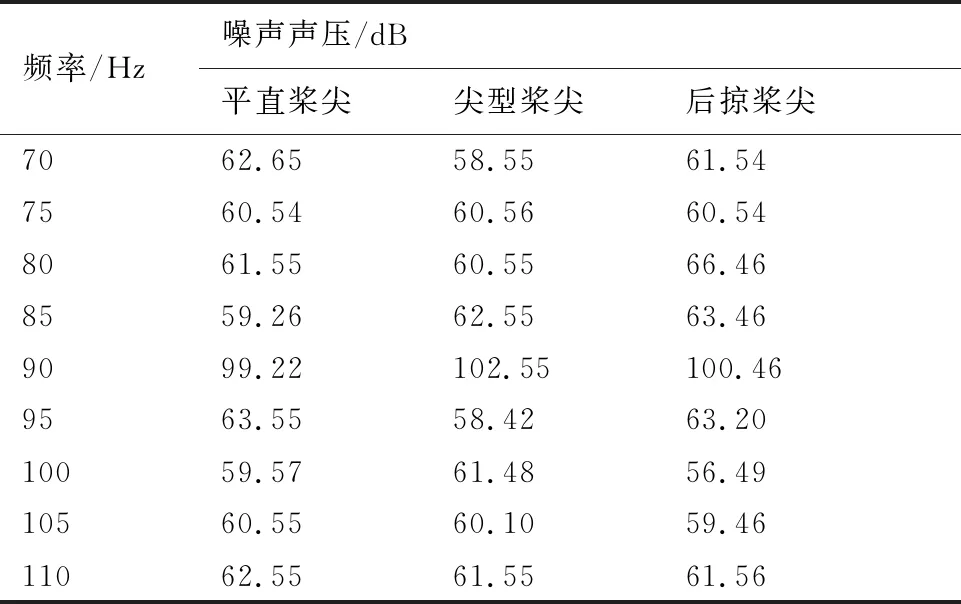
表1 3種槳尖形狀螺旋槳巡航狀態下大渦模擬仿真數據

表2 3種槳尖形狀螺旋槳爬升狀態下大渦模擬仿真數據
3 螺旋槳風洞聲學試驗
3.1 螺旋槳實物和風洞聲學試驗
加工出3種不同槳尖形狀的兩葉木質螺旋槳風洞試驗模型,實物如圖4所示。
為了進行3種不同槳尖形狀電動飛機螺旋槳的噪聲研究,在中國航空工業空氣動力研究院的低速增壓FL-9風洞中進行螺旋槳風洞試驗。螺旋槳風洞聲學試驗段和螺旋槳裝機狀態如圖5和圖6所示。

圖4 3種螺旋槳實物模型Fig.4 Three kinds of physical model propellers

圖5 螺旋槳風洞聲學試驗段Fig.5 Acoustic test section of propeller wind tunnel
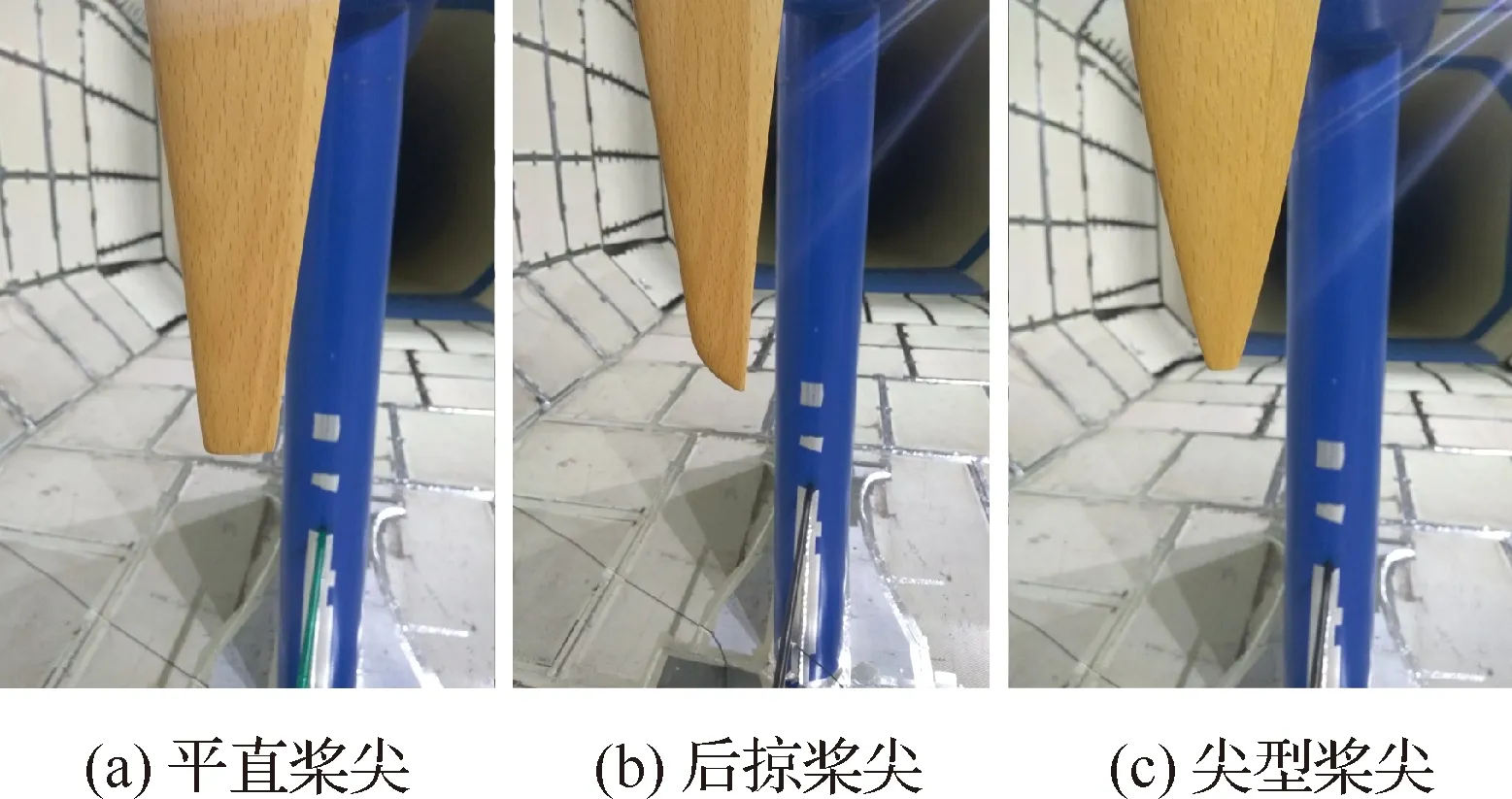
圖6 平直槳尖、尖型槳尖和后掠槳尖螺旋槳在風洞中Fig.6 Conventional shaped, pointed shaped and swept shaped propellers in wind tunnel
3.2 噪聲試驗設置及步驟
試驗迎角α=0°、側滑角β=0°,試驗風速為30 m/s,試驗轉速為2 700 r/min和3 900 r/min。
螺旋槳風洞試驗模型采用單槳支撐形式。試驗時針對模型的各個狀態,在風速一定、螺旋槳轉速不同的情況下,測量并記錄槳葉旋轉平面距離槳轂中心的一倍槳盤直徑位置距離(960 mm)的噪聲聲壓級。
同時對傳聲器測量的試驗數據進行了修正和處理:
1) 傳聲器相位陣列、表面傳聲器測量電信號轉換成聲壓信號。
2) 將傳聲器測量的聲壓信號進行快速傅里葉變換,轉換為頻域信號,對傅里葉變化后的聲信號頻譜進行分析。
3.3 噪聲試驗結果
通過對傳聲器的測量數據進行快速傅里葉變換分析,得到在來流30 m/s的情況下螺旋槳在巡航轉速和爬升轉速的聲學噪聲測量結果。平直槳尖、尖型槳尖和后掠槳尖螺旋槳的噪聲聲壓水平(Sound Pressure Level,SPL)如圖7所示。
從圖7可以看出螺旋槳在巡航轉速下,尖型槳尖在一階的最大噪聲聲壓依次高于后掠槳尖和平直槳尖,平直槳尖最低,整體相差為1.57 dB。在其他頻率下尖形螺旋槳噪聲表現總體較其他兩槳要好。由圖8可以看出3種槳尖的螺旋槳爬升狀態下在一階頻率130 Hz的噪聲聲壓級基本一致,噪聲水平相同。

圖7 不同槳尖螺旋槳在轉速2 700 r/min的一階噪聲聲壓級頻譜對比Fig.7 Comparison of first-order noise sound pressure level spectra of different blade tip propellers at 2 700 r/min
4 螺旋槳聲學試驗對比分析
4.1 巡航狀態
通過噪聲數值模擬和風洞試驗測得的平直槳尖、尖型槳尖和后掠槳尖的兩葉螺旋槳在巡航轉速下的頻譜對比,見圖9~圖11。
由數值仿真和風洞試驗噪聲聲壓級對比分析可知,當巡航狀態下螺旋槳處于一階頻率(90 Hz)時,平直槳尖、尖型槳尖和后掠槳尖的仿真值分別為99.22 dB、102.55 dB和100.46 dB,與風洞試驗值的相對誤差分別為0.51%、1.23%和0.13%。

圖8 不同槳尖螺旋槳在轉速3 900 r/min的一階噪聲聲壓級頻譜對比Fig.8 Comparison of first-order noise sound tunnel pressure level spectra of different blade tip propellers at 3 900 r/min

圖9 平直槳尖螺旋槳在巡航狀態風洞試驗與大渦模擬的噪聲頻譜比較Fig.9 Comparison of noise spectra of wind tunnel test and large eddy simulation of regular shaped propeller in cruise state

圖10 尖型槳尖螺旋槳巡航狀態風洞試驗與大渦模擬的噪聲頻譜比較Fig.10 Comparison of noise spectra of wind tunnel test and large eddy simulation of pointed shaped propeller in cruise state

圖11 后掠槳尖螺旋槳在巡航狀態風洞試驗與大渦模擬的噪聲頻譜比較Fig.11 Comparison of noise spectra of wind tunnel test and large eddy simulation of swept shaped propeller in cruise state
4.2 爬升狀態
通過噪聲數值模擬和風洞試驗測得的平直槳尖、尖型槳尖和后掠槳尖的兩葉螺旋槳在爬升轉速下的頻譜對比,見圖12~圖14。

圖12 平直槳尖螺旋槳在爬升狀態風洞試驗與大渦模擬的噪聲頻譜比較Fig.12 Comparison of noise spectra of wind tunnel test and large eddy simulation of regular shaped propeller in climbing state

圖13 尖型槳尖螺旋槳在爬升狀態風洞試驗與大渦模擬的噪聲頻譜比較Fig.13 Comparison of noise spectra of wind tunnel test and large eddy simulation of pointed shaped propeller in climbing state
數值仿真和風洞試驗噪聲聲壓級對比分析,當爬升狀態下螺旋槳處于一階頻率130 Hz時,平直槳尖、尖型槳尖和后掠槳尖的仿真值分別為108.89 dB、108.25 dB和107.15 dB,與風洞試驗值的相對誤差分別為0.70%、1.07%和1.44%。
4.3 螺旋槳拉力
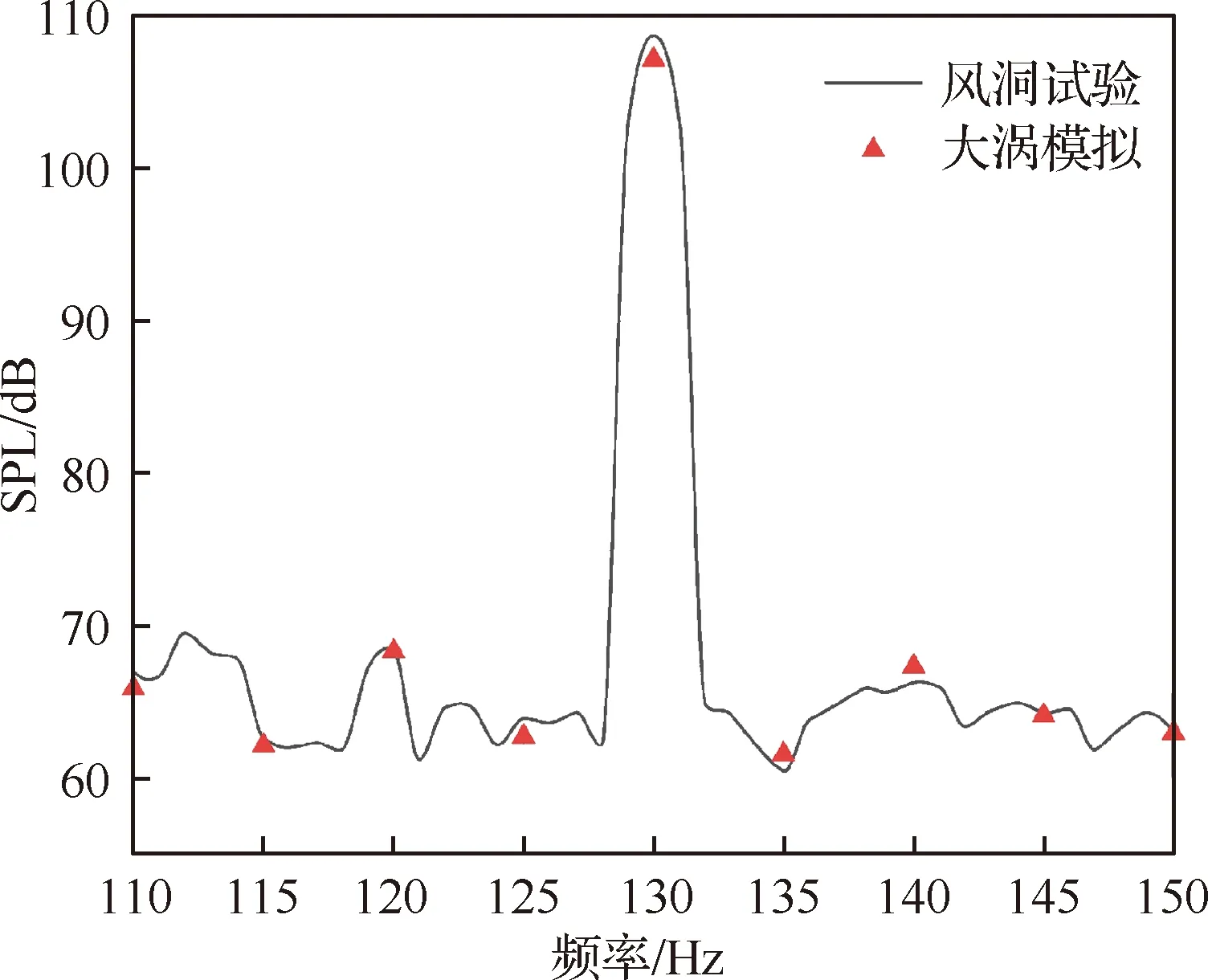
圖14 后掠槳尖螺旋槳在爬升狀態風洞試驗與大渦模擬的噪聲頻譜比較Fig.14 Comparison of noise spectra of wind tunnel test and large eddy simulation of swept shaped propeller in climbing state
螺旋槳的主要功能是為飛機提供拉力,降低噪聲不能以犧牲拉力為代價,因此通過風洞試驗測得平直槳尖、尖型槳尖和后掠槳尖的兩葉螺旋槳在來流風速30 m/s和不同轉速下的拉力并對比,結果見圖15。可以得到隨著螺旋槳轉速的增加,其拉力不斷增長,在來流風速30 m/s的巡航轉速2 700 r/min時,平直槳尖、尖型槳尖和后掠槳尖的螺旋槳拉力分別為121.25 N、134.82 N和113.06 N,尖型槳尖拉力較大;但在爬升轉速3 900 r/min時,平直槳尖、尖型槳尖和后掠槳尖的螺旋槳拉力分別為396.16 N、388.64 N和384.82 N,此時平直槳尖螺旋槳拉力是三者中最大的。
考慮電動飛機在爬升時需用拉力較大,適航對噪聲要求主要體現在地面滑跑和爬升階段,在爬升轉速3 900 r/min下平直槳尖螺旋槳拉力為三者最大,且在巡航和爬升狀態下,平直槳尖的整體噪聲水平較低;尖型槳尖拉力在巡航時較大,但在巡航和爬升階段的噪聲都為最高;綜合性能與噪聲兩種要求,平直槳尖整體表現較優。
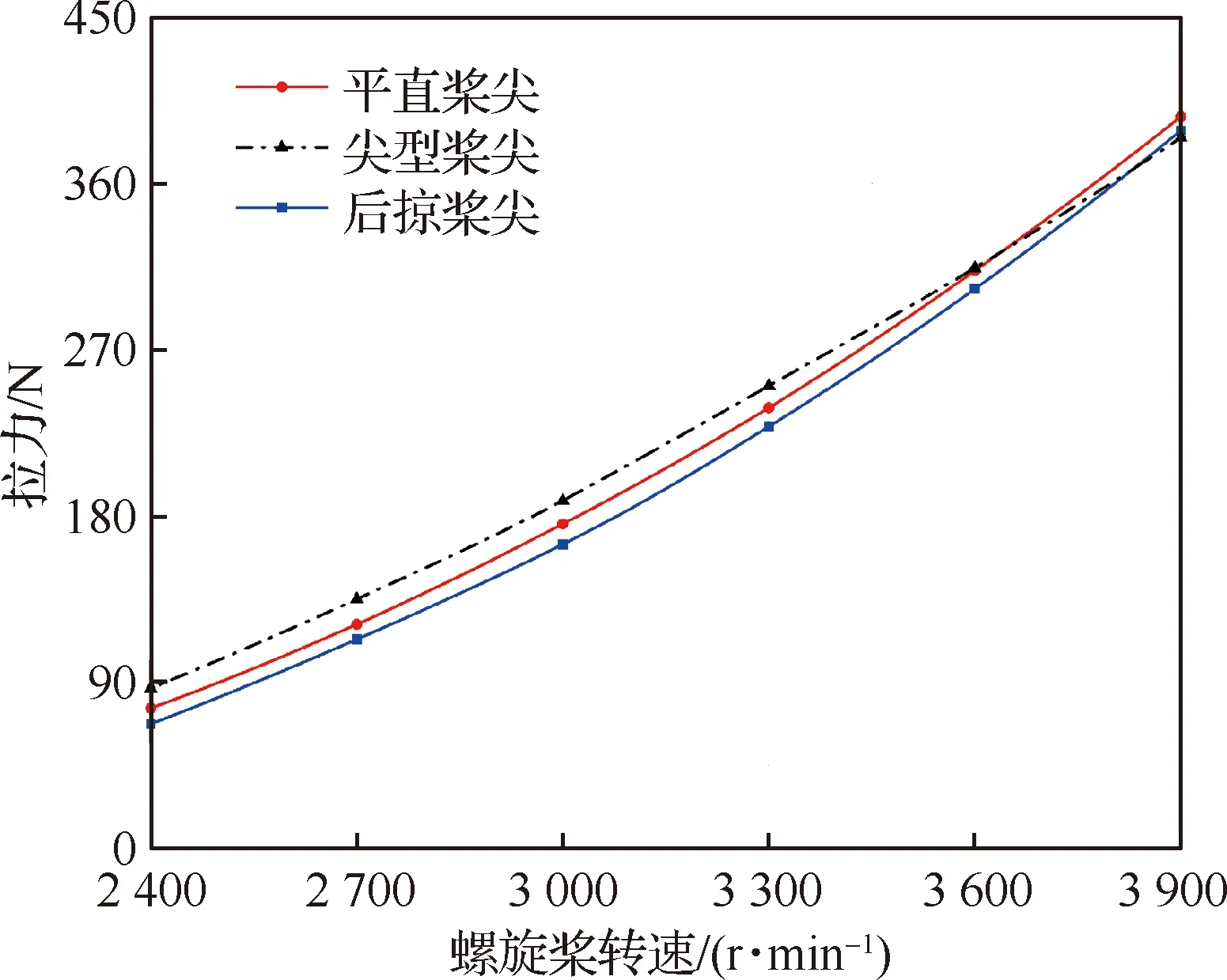
圖15 不同槳尖形狀的螺旋槳拉力Fig.15 Propeller thrust with different tip shapes
5 結 論
采用大渦模擬LES模型仿真和螺旋槳聲學風洞試驗對電動飛機平直槳尖、尖型槳尖和后掠槳尖形狀螺旋槳進行了噪聲測量與對比分析。
1) 螺旋槳在巡航和爬升狀態下,平直槳尖的整體噪聲水平較低;在其他頻率范圍,尖形槳尖噪聲水平較低。綜合性能與噪聲兩種要求,平直槳尖略優于尖型槳尖,整體表現較優,平直槳尖螺旋槳更滿足電動飛機對噪聲和性能的要求。
2) 驗證了通過風洞試驗測試分析電動飛機螺旋槳不同槳尖外形聲學試驗的可行性,為螺旋槳噪聲試驗提供一定的參考。
3) LES模型數值模擬結果與仿真結果吻合度較高,驗證了大渦模擬在螺旋槳噪聲計算中具有較好的工程應用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
光學精密工程(2016年6期)2016-11-07 09:07:19
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04