超聲導(dǎo)波正軌動態(tài)檢測信號畸變矯正算法研究
2021-03-27 06:24:04張鵬飛唐志峰
結(jié)構(gòu)工程師 2021年1期
張鵬飛 趙 波 唐志峰
(1.浙江大學(xué)制造技術(shù)及裝備自動化研究所,杭州310027;2.北京鐵科英邁技術(shù)有限公司,北京100081;3.浙江大學(xué)生物醫(yī)學(xué)工程與儀器科學(xué)學(xué)院,杭州310027)
0 引 言
隨著中國鐵路設(shè)施建設(shè)的日趨完善,針對鐵路軌道的結(jié)構(gòu)完整性檢測愈受重視。傳統(tǒng)的鋼軌檢測采用超聲探傷小車,但探傷小車上安裝的組合式超聲探頭難以檢測鋼軌中存在的垂直于鋼軌走向的橫截面損傷以及鋼軌軌頭踏面的魚鱗紋。作為傳統(tǒng)超聲探傷的盲點,這些種類的傷損導(dǎo)致的斷軌事故卻時有發(fā)生。超聲導(dǎo)波檢測利用了超聲導(dǎo)波傳播距離遠(yuǎn),覆蓋范圍大的優(yōu)點,在鋼軌探傷中能夠完整覆蓋鋼軌橫截面并且對橫截面損傷尤為敏感,克服了傳統(tǒng)超聲探傷的缺點,因而在鋼軌無損檢測領(lǐng)域具有非常廣闊的應(yīng)用前景[1]。
針對鋼軌缺陷的導(dǎo)波檢測,國內(nèi)外學(xué)者已經(jīng)開展了相關(guān)的研究。Rose 等研究了超聲導(dǎo)波針對鋼軌軌頭的缺陷的檢測的可行性,并利用半解析有限元技術(shù)分析了導(dǎo)波在軌頭傳播的頻散曲線,探索適合在軌頭傳播的超聲導(dǎo)波模態(tài)和頻率[2]。王彭等提出了一種利用鋼軌裂縫反射系數(shù)和波幅分解的方法,檢測斷軌并能實現(xiàn)精確定位,在2.8 m長的含有裂縫的實驗鋼軌上,取得了較好的效果[3]。胡劍虹等針對鋼軌軌底的缺陷檢測,提出了基于磁致伸縮原理的超聲導(dǎo)波換能器的設(shè)計方案,通過實驗驗證了該方案的可行性,并通過有限元分析確定了適合于檢測鋼軌軌底缺陷的超聲導(dǎo)波頻率[4]。G.Konstantinidis 等在板狀結(jié)構(gòu)的監(jiān)測中,提出一種基于最優(yōu)基準(zhǔn)信號的差值算法,以克服溫度對監(jiān)測的影響[5-6]。Chang Liu等針對變化的環(huán)境,提出一種通過奇異值分解的差值運算,實現(xiàn)缺陷精確定位的算法[7],而在鋼軌導(dǎo)波檢測信號的畸變矯正處理算法研究方面還鮮有報道。
本文針對鋼軌超聲導(dǎo)波動態(tài)檢測信號的特點,提出了一種鋼軌超聲導(dǎo)波動態(tài)檢測回波畸變矯正算法。算法以噪聲概率分布為依據(jù),結(jié)合了希爾伯特變換、線性插值、局部最大相關(guān)性、波幅調(diào)整等多種處理方法,能有效克服溫度變化、電壓不穩(wěn)定等多種影響因素導(dǎo)致的回波信號畸變,為準(zhǔn)確判斷鋼軌的結(jié)構(gòu)完整性狀況提供了保證。經(jīng)實驗驗證了該算法的有效性。
1 鋼軌超聲導(dǎo)波動態(tài)檢測系統(tǒng)
1.1 系統(tǒng)組成
鋼軌超聲導(dǎo)波動態(tài)檢測系統(tǒng)主要包括鋼軌導(dǎo)波探傷輪、檢測主機和上位機。鋼軌導(dǎo)波探傷輪基于壓電原理,用于激勵和接收導(dǎo)波;檢測主機由激勵單元、功率放大單元、前置放大單元、信號處理單元和計數(shù)器組成,主要負(fù)責(zé)激勵探傷輪、采集鋼軌回波并上傳至上位機;上位機下發(fā)控制參數(shù)并接收檢測信號并進行后續(xù)信號處理、儲存和展示。系統(tǒng)拓?fù)浣Y(jié)構(gòu)如圖1 所示。系統(tǒng)可在鋼軌上運行,在運動過程中進行導(dǎo)波檢測,由計數(shù)器確認(rèn)檢測位置,典型檢測信號如圖2和圖3所示。
1.2 導(dǎo)波探傷輪和導(dǎo)波信號激勵
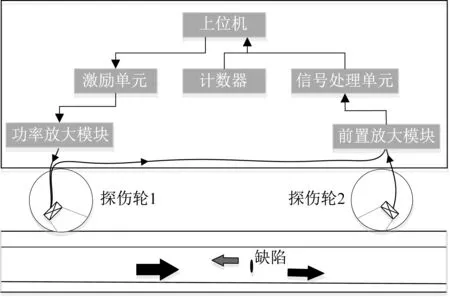
圖1 鋼軌超聲導(dǎo)波動態(tài)檢測系統(tǒng)Fig.1 The rail guided wave dynamic detection system
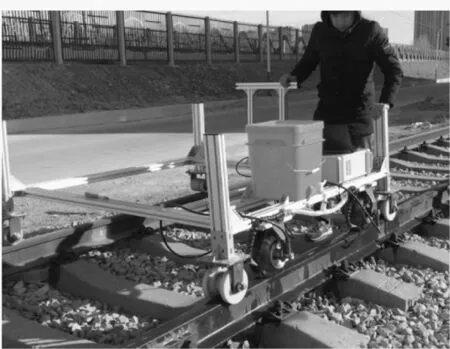
圖2 現(xiàn)場測試照片F(xiàn)ig.2 Field test
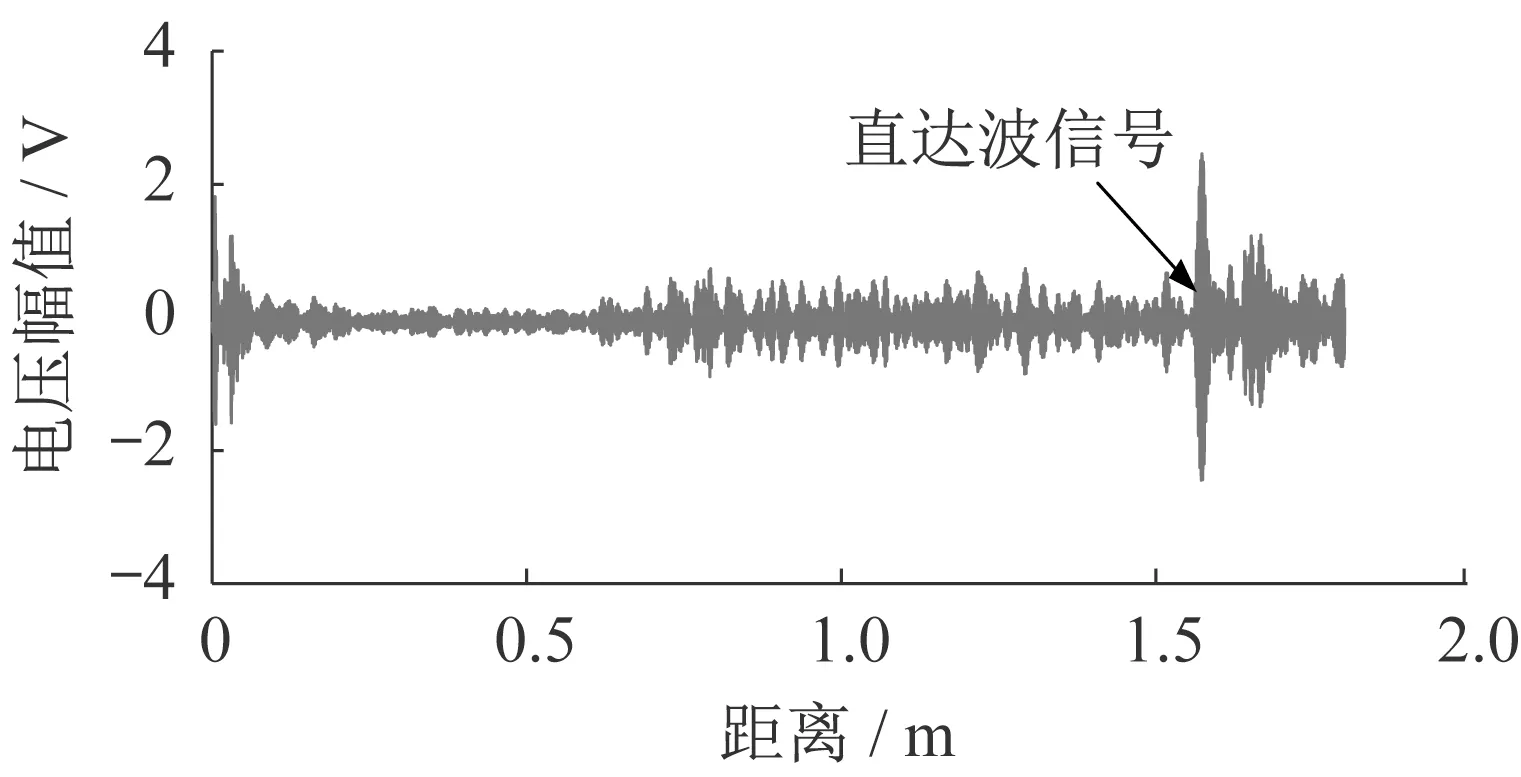
圖3 實測信號Fig.3 Measured signal
導(dǎo)波探傷輪由壓電式換能器、內(nèi)部夾具和外部探傷輪組成。探傷輪采用動密封結(jié)構(gòu),保障輪子在運動過程中的內(nèi)部密封性,壓電式換能器由低頻電脈沖信號激勵產(chǎn)生振動通過耦合液和透射橡膠再經(jīng)過水耦合進入到鋼軌中從而激勵出導(dǎo)波,導(dǎo)波沿著鋼軌傳播被另一個探傷輪接收到,如果傳播路徑上存在損傷,則直達(dá)波信號會出現(xiàn)幅值下降,通過有無損傷情況下接收信號的對比可確認(rèn)是否存在傷損。經(jīng)ABAQUS 仿真研究和實驗,認(rèn)為諸如64 K 的中低頻超聲導(dǎo)波在保證檢測靈敏度的同時,更適合于鋼軌的缺陷檢測,因脈沖回波式檢測中受到探輪內(nèi)部和鋼軌軌底的導(dǎo)波反射的影響,信號較為復(fù)雜,因此本文中采用單發(fā)單收的形式進行檢測。
2 信號處理
2.1 基礎(chǔ)算法模型
超聲導(dǎo)波信號噪聲分布實驗表明,檢測系統(tǒng)中的噪聲是近似于均值為0 的隨機噪聲,噪聲概率密度譜如圖4所示。
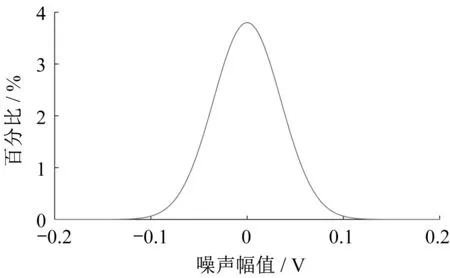
圖4 檢測系統(tǒng)中隨機噪聲的概率密度Fig.4 The probability density of random noise in the detection system
對于特定功率和增益下的回波信號,可以簡單表示為

式中:Ri(n)表示第i 次測量接收到的回波信號;S(n)是鋼軌的真實回波信號;Ni(n)是第i 次測量中的隨機噪聲;N是總的采樣點數(shù)。
若在相同的條件下,對連續(xù)M 次測量做平均運算,根據(jù)隨機噪聲均值為0的性質(zhì),在M 足夠大的情況下,可以得到S(n)的近似表示,即有

式中,S0(n)表示相同條件下M 次測量結(jié)果的平均。
因此,若以S0(n)作為參考信號,對于任意一次的測量結(jié)果Ri(n),做差值運算:

實際測量中,式(3)成立的條件是苛刻的,溫度、檢測系統(tǒng)的電壓漂移、加載導(dǎo)波的條件、邊界條件等都是差值運算中需要考慮的影響因素[1]。參考信號S0(n)與Ri(n) 任意位置處的瞬時相位保持一致,是差值運算Ri(n)-S0(n)≈Ni(n)成立的必要條件。但由于溫度等影響因素的存在,測量信號和參考信號中的瞬時相位不可能總是保持一致,這就導(dǎo)致差值運算的結(jié)果不再近似于隨機噪聲的分布。
利用希爾伯特變換后的幅值序列代替原時間序列,不僅同樣能反映信號瞬時能量分布,而且在差值運算過程中,一定程度上減小了瞬時相位的偏差引起的運算誤差。通過希爾伯特變換求解解析信號并取模,即得到幅值序列。令H表示希爾伯特變換,并返回變換序列的解析信號,令||表示取模運算,根據(jù)希爾伯特變換的線性時不變性質(zhì),有

另,根據(jù)式(2)有

根據(jù)矢量的加減運算性質(zhì),結(jié)合式(5),對式(4)求取值范圍,則有
式(6)表明,用希爾伯特幅值序列做差值運算時,差值近似且小于隨機噪聲的希爾伯特幅值序列(圖5)。因此,記隨機噪聲的希爾伯特幅值序列的概率分布函數(shù)為F(x),表示噪聲的希爾伯特幅值序列中幅值不大于x 的概率。顯然,F(xiàn)(x) ≤1。若合理設(shè)置閾值Threshold,使得p=F(Threshold)接近于1,則如果在連續(xù)K 次測量中,都存在采樣點n0,滿足:

則可以1-(1-p)K的概率認(rèn)為,鋼軌在該采樣信號對應(yīng)位置存在缺陷。
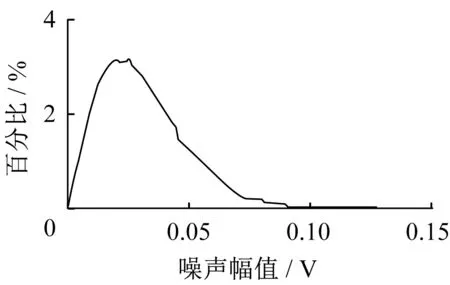
圖5 噪聲經(jīng)希爾伯特變換后的幅值序列Fig.5 The amplitude sequence of the noise through Hilbert transform
2.2 溫度補償
引入希爾伯特變換和取模運算并不能從根本上解決瞬時相位的偏差帶來的運算誤差。實際測量中,溫度作為差值運算最重要的影響因素所產(chǎn)生的誤差,需要通過進一步的處理予以補償。
2.2.1 溫度變化的影響
在溫度變化對超聲導(dǎo)波傳播的影響的研究中,Weaver 和Lobkis 認(rèn)為溫度變化對超聲導(dǎo)波信號產(chǎn)生一個在時域上拉伸或壓縮的作用[8]。軌溫升高聲速變大,近似于在時域上對波形拉伸;軌溫降低聲速變小,近似于在時域上對波形壓縮。Tindaro Cicero 針對不同溫度下,相同距離處的回波的時移進行分析[1]。考慮溫度變化δT,其他條件相同的情況下,距離發(fā)射位置d處的回波的時移δt,對式t=求偏微分得:

式(8)表明,溫度變化導(dǎo)致鋼軌中導(dǎo)波的聲速的變化是引起回波時移的主要原因。且時移的大小與傳播的距離成正比。距離發(fā)射端越遠(yuǎn),在相同溫度變化的情況下,回波的時移越大。而回波的時移即意味著測量信號與參考信號之間會產(chǎn)生瞬時相位的偏差。
2.2.2 溫度補償策略
單發(fā)單收的模式下,初始脈沖峰值點常作為參考點,來估計聲速變化對波形整體伸縮變化的影響[6-7]。通過參考點計算出聲速對整體波形的伸縮變化的影響的情況下,以線性插值運算拉伸或壓縮波形,使得測量信號直達(dá)波與參考信號直達(dá)波對齊,以保證測量信號與參考信號的瞬時相位在整體上保持一致(圖6(a))。
由于溫度變化對不同距離處產(chǎn)生的時移效果不同,為保證測量信號與參考信號在局部位置上瞬時相位均保持一致,需要針對局部位置精確計算時移,以保證差值運算得到最小誤差。
針對上述的情況,給出下述的基于極小值分段和基于局部最大相關(guān)系數(shù)求時移的處理算法:
步驟1:給定最小段長MinLen,對差值運算后的信號,以極小值點分段,且保證每段不小于MinLen,記 第i段 信 號 為Meas(i),總 段 數(shù)M,Meas(i)的最左值位置為left。
步驟2:對于每段信號Meas(i),求取參考信號對應(yīng)位置附近等長的最佳匹配Ref(i),使得Meas(i)和Ref(i)相關(guān)系數(shù)最大,此時left相對于Ref(i)的最左值位置的偏移量offset(i)即為局部信號的時移。
步驟3:差值運算求取每段信號的差值:Diff(i)=Meas(i)-Ref(i),i∈[1,M]。以 極 小 值點分段,相比于以固定值分段,可以避免完整的信號包絡(luò)被分割至兩個不同信號段的現(xiàn)象發(fā)生,從而減少對后續(xù)基于局部相關(guān)系數(shù)確定時移的影響。考慮發(fā)射脈沖的頻率f、周期數(shù)cycles和采樣率fs,可以估算出發(fā)射脈沖包含的采樣點數(shù)count=round(fs×cycles÷f),因而一個完整的回波包絡(luò)包含的采樣點數(shù)應(yīng)不小于count。這對最小段長MinLen的選擇有一定的指導(dǎo)意義。
實際應(yīng)用中,為進一步補償溫度變化的影響,還可以在不同軌溫下獲取多組測量信號,分別作均值運算,得到不同軌溫下的參考信號集。對于任意的測量信號,從參考信號集中選取與測量信號的簡單差值的均方根最小的信號為最佳匹配參考信號。并以該最佳匹配參考信號與測量信號做溫度補償處理,差值運算后得到真實的運算結(jié)果(圖6(b))。
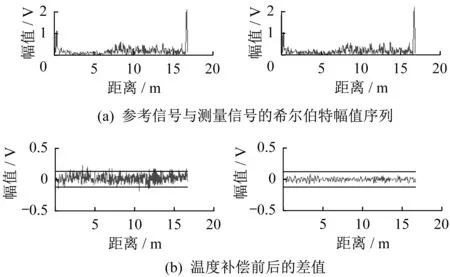
圖6 溫度補償前后的差值運算效果比較Fig.6 Comparison of difference operation before and after temperature compensation
2.3 能量補償
通常情況下,檢測系統(tǒng)電源等的不穩(wěn)定性,會導(dǎo)致不同測量信號能量的略微差異。此外,壓電式換能器的壓電晶片在長期工作條件下的老化作用,從而導(dǎo)致測量信號能量的減小。
考慮上述兩種情況,若初始監(jiān)測時,鋼軌的真實直達(dá)波信號為S(n),引入能量因子?,改進式(1),則任意一次測量的回波信號可表示為

初始檢測時,能量的變化主要是系統(tǒng)電源等的不穩(wěn)定性引起,此時有?≈1.0。經(jīng)過相當(dāng)長的時間后,能量的變化主要由晶片長期工作引起,此時?逐漸減小。通過測量信號與參考信號的直達(dá)波峰值比較,或整體波形的幅值比較,可以很方便地計算出能量因子?,記
則式(3)變?yōu)?/p>
且式(6)變?yōu)?/p>
上兩式表明,能量因子的引入,雖然補償了晶片連續(xù)性工作引起的信號能量減弱,但同時也導(dǎo)致差值運算后的差值誤差增大。不過,可以認(rèn)為在?足夠大接近于1.0 的情況下,使用式(11)的方法檢測缺陷,增大的誤差帶來的影響可以忽略不計。
2.4 無關(guān)信號
檢測時旁邊軌道有列車通過時,電磁干擾會對采集系統(tǒng)產(chǎn)生很大的影響,此時接收到的檢測信號,不能作為有效的檢測信號,應(yīng)予以排除。實驗表明,對于有效的測量信號,其與參考信號的相關(guān)系數(shù)|ρ|≥0.9(圖7)。通過對回波信號和參考信號的希爾伯特幅值序列求相關(guān)系數(shù),能有效地區(qū)分列車通過時候的信號。
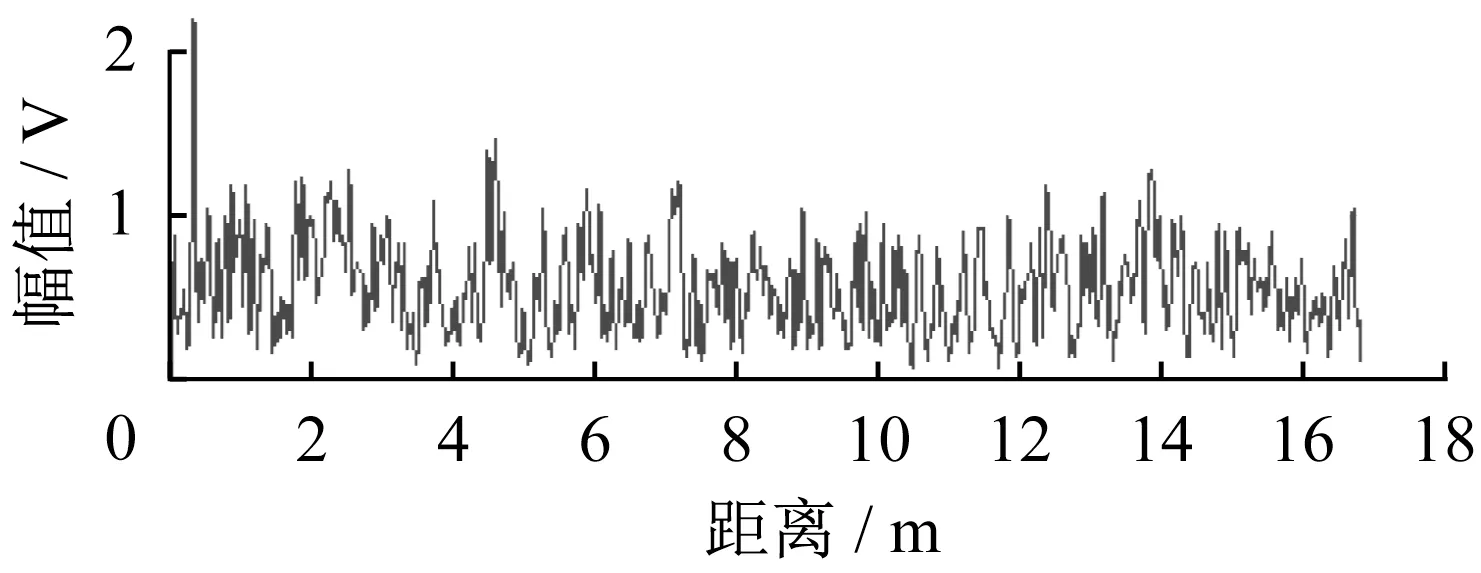
圖7 列車通過時的信號,其相關(guān)系數(shù)|ρ|=0.0966Fig.7 The signal when the train is coming,correlation coefficient|ρ|=0.0966
3 結(jié) 論
基于超聲導(dǎo)波的鋼軌動態(tài)檢測系統(tǒng)為鋼軌的結(jié)構(gòu)完整性和安全性檢測提供了一個有效的補充手段。必須指出的是,導(dǎo)波信號是對環(huán)境變化極其敏感的,對導(dǎo)波信號影響的最主要因素就是環(huán)境溫度的變化。除了溫度以外,檢測系統(tǒng)的電壓漂移、加載導(dǎo)波的條件、列車通過時的電磁干擾等都是不可忽視的影響因素。穩(wěn)定有效的檢測信號是保證良好檢測效果的前提,本文提出的信號矯正算法能有效克服這些因素對檢測信號穩(wěn)定性和可靠性的影響。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12