基于EBPNN模型的遙感圖像變化檢測研究
2021-04-02 03:31:28李正偉
計算機測量與控制 2021年3期
李正偉
(成都理工大學 工程技術學院,四川 樂山 614007)
0 引言
遙感圖像的變化檢測可用于監測區域內不同時期的變化,由于遙感圖像具有非線性、區分性和不變性等特點,因此,必須提取這些特征后再進行圖像的分類和目標檢測[1]。在復雜的數據集中,可以通過數據挖掘技術提高分類精度來實現變化檢測。散斑噪聲是遙感圖像中普遍存在的噪聲,遙感圖像還包括高斯噪聲和脈沖噪聲[2]。遙感圖像變化檢測技術主要有:光譜混合分析法[3]、支持向量機(SVM)[4]、分類與回歸樹模型[5]和人工神經網絡(ANN)[6]。文獻[7]提出了基于隨機森林的變化檢測方法,有效降低了漏檢率和虛檢率。而遙感圖像分類的最常用空間特征包括小波紋理、灰度共生矩陣(GLCM)、像素形狀記錄和形態輪廓[8]。文獻[9]提出了基于特征融合的遙感圖像分類,有效提高了不同場景分類精度。
為了有效實現遙感圖像的分類和變化檢測,本文利用自適應中值濾波(AMF)對遙感圖像中進行降噪預處理并提取次級特征,從而加快了分類過程。將提取的特征結合增強型反向傳播神經網絡(EBPNN)進行分類,并識別分類后遙感圖像的變化。
1 研究概況
1.1 研究區域
本文采用國家遙感中心的資源1號線性成像自掃描儀-4(LISS-4)圖像,該圖像取自2011年8月12日和2017年4月28日期間河北省滄州市任丘市的遙感圖像,任丘市位于北緯38.42、東經116.07,海拔為40 m。重采樣技術采用三次卷積并對地形進行了校正,傳感器的輸出分辨率為24 m。
1.2 研究方法
圖1給出了所提出方法的流程。首先,在AMF的幫助下,對2011年12月和2017年4月的輸入圖像進行降噪預處理。然后對預處理后的圖像進行特征提取,最后實現分類及變化檢測。
2 遙感圖像預處理
為了降低遙感圖像的噪聲影響,本文使用自適應中值濾波(AMF)[10]來平滑圖像。AMF能夠有效處理高密度的脈沖噪聲,并且在處理非脈沖噪聲的同時,還能保存更多的圖像細節。將Sx,y作為中心像素(x,y)的模板窗口,Zmin、Zmax和Zmed分別為窗口Sx,y中的最小灰度、最大灰度和中度灰度,Zx,y為像素(x,y)中的灰度值,Smax為Sx,y的最大容許范圍。AMF分兩個階段處理:
階段1:A1=Zmed-Zmin,A2=Zmax-Zmed,若A1>0且A2>0,則繼續階段2;若Sx,y≤Smax,則重復階段1;直至輸出Zx,y。
階段2:B1=Zx,y-Zmin,B2=Zmax-Zx,y,若B1>0且B2>0,則輸出Zx,y;否則,輸出Zmed。
因此,如果Zmed是否為脈沖噪聲,則分析階段1。如果Zx,y是否為脈沖噪聲,則不采用階段2。如果Zmed和Zx,y都不是脈沖噪聲,則輸出為常量Zx,y。利用該輸出代替中間值以此避免丟失遙感圖像中的其他信息。通過擴展AMF的窗口技術,可以降低脈沖噪聲的譜密度。為了提高該技術的應用,還需對窗口的形狀和方向進行改進,從而降低脈沖噪聲的空間密度。在完成圖像平滑處理后,對圖像進行特征提取。
3 特征提取
將特征提取與預處理圖像結合使用,對2011年至2017年期間的空間時空變化和幾何變化建模。在機器學習中,特征提取從最初的一組測量數據開始,刻意地構建特征值以使其有用且無冗余。特征提取的關鍵是從新的數據中獲取最重要的信息,并在較小的維數間隙內表示這些信息。對圖像中的每個像素進行特征提取,提取出與其鄰域相關的Tamura和Law掩模等特征。
3.1 Tamura特征
Tamura特征的提出是人在紋理中感知到特征成分的心理物理研究,包括對比度、方向性和粗糙度[11]。Tamura特征取決于人類的圖像感知。傳統的Tamura特征可用于紋理均勻的圖像,并能處理較差的普通圖像。
1)對比度:對比度特征有助于測量圖像中像素灰度強度的變化,以及其分布偏向黑色或白色的程度:
(1)
其中:σ為標準差,v=0.25,β為峰度。
2)方向性:方向性特征考慮了邊緣強度和方向角。根據Prewitt邊緣檢測算子[12]使用逐像素導數計算:
(2)
其中:Δx和Δy分別為x和y方向上的像素差。
3)粗糙度:利用粗糙度特征可測量圖像粒度,識別出顯著的灰度空間變化距離。對于固定窗口估計,具有較少紋理成分的紋理比具有較大紋理成分的紋理更粗糙,該方法用于評估紋理的粗糙度。在每個像素(x,y)處,p(x,y)用于計算窗口大小分別為0,1,2,3,4,6周圍像素的平均值。在每個像素(x,y)處,計算不同方向相反側的不重疊平均集,在每個尺度Yi(x,y)上的絕對差值為:

(3)
p(x,y)={Y1,c,Y1,d,Y2,c,Y2,d,…}
(4)
選擇變化最大的尺度max(Yi),則最佳像素窗口大小Sbest為2i。通過對整個圖像的Sbest進行平均來計算圖像的粗度。
3.2 Law掩模特征
Law掩模特征提取利用圖像的自然微觀結構屬性(水平、邊緣、斑點和紋波)提取出次級特征并用于分類[13]。序列窗口(SW)和隨機窗口(RW)產生Law掩模為3×3的統計參數。根據條件2≤C≤M和2≤D≤N,選擇SW/RW的大小C×D,其中,C和D為窗口大小,P和O為圖像大小。確定圖像上隨機窗口的起始位置:
X(n+1)=((q·x(v))+s)%·P
(5)
其中:q和s為窗口數量的決定因素。Law掩模建立了測量固定估計窗口內變化量的紋理能量方法。利用9個5×5卷積掩模的排列計算紋理能量,該紋理能量由9個矢量表示圖像的每個像素。
中心加權局部平均值由L5矢量給出。利用E5、S5和R5矢量分別用于檢測邊緣、斑點和波紋。矢量對的外積得到二維卷積掩模。
Law掩模程序的初始階段是通過在圖像周圍移動一個小窗口并從每個像素中減去局部平均值來消除影響。為了得到特征提取的圖像,將每個鄰域的平均強度降至接近于零的值。窗口的大小取決于圖像的類別;特征場景使用15×15的窗口。將二維掩模相乘得到16個紋理能量圖。將每個紋理能量圖替換為其平均圖,并生成9個過濾圖像。
4 基于變化檢測的分類
對于特征提取的結果,在分類階段之后進行變化檢測,并借助增強型反向傳播神經網絡(EBPNN)[14]進行檢測。分類階段又分為兩個階段:訓練階段和測試階段。在訓練階段,根據每個節點的權重創建一個EBPNN,然后根據提取的特征對圖像進行分類。根據圖像的特征,將遙感圖像分為植被、城區和水域三類。測試階段在EBPNN中執行,以實現最優的權重選擇。將提取的特征與測試階段數據庫中積累的特征進行比較得到分類輸出。分類后,將識別出2011年12月和2017年4月的遙感圖像的變化。
反向傳播神經網絡(BPNN)是用于訓練多層神經網絡的直接學習策略。術語“反向傳播”表示在輸出處處理的錯誤反向復制,并從輸出層開始到隱藏層,最后到輸入層。EBPNN算法取決于輸出神經元的線性和非線性誤差之和,以最少的迭代次數來提高收斂速度。EBPNN算法分為前饋、誤差計算和更新權值。結合測試程序用于評估算法的實現情況。EBPNN算法步驟如下。
步驟1:初始化訓練集參數s,w,v,Max_v和Min_v(大小、權重、變量、最大變量、最小變量)
步驟2:計算每個節點的隱藏層:
(6)
(7)
步驟3:計算隱藏層之間的距離:
Li=(Max_v,Min_v)2
(8)
步驟4:計算最大權重:
(9)
(10)
其中:sk為隱藏層神經元的數量。
步驟5:計算中心值:
C(s,1)=(Max_v,Min_v)/2
(11)
步驟6:更新輸出層權重:
wgba(i-1)=wgba(i-1)+▽wgba
(12)
步驟7:隨機選擇權重
步驟8:計算隱藏層閾值
步驟9:尋找輸出層閾值:
(13)
步驟10:訓練過程:創建前饋神經網絡,誤差計算,更新新的權值;
步驟11:測試階段;
步驟12:確定網絡模型;
步驟13:對圖像(植被、水域和城區)進行分類;
步驟14:對分類結果進行分析。
5 實驗分析
本文在Matlab軟件中開發基于變換檢測的特征提取。該數據集取自資源1號圖像。數據集收集了2011年和2017年的Geotiff圖像格式并執行變化檢測技術。本文開發了適用于變化檢測的EBPNN分類器以提高分類精度。此外,還集成了AMF來消除遙感圖像中的噪聲。從圖像中提取次級特征并進行分類,最后與現有的前向神經網絡(FFNN)和卷積神經網絡(CNN)進行了比較。
5.1 變換檢測
從數據庫獲取的圖像作為自動變化檢測技術的輸入,如圖2和圖3所示。
圖2 任丘市2011年12月的圖像

圖3 任丘市2017年4月的圖像
通過AMF進行預處理來降低噪聲,得到的輸出如圖4和圖5所示。同時保留了兩個部分得到的窗口形狀和方向變化細節,避免了由于窗口尺寸增大而導致的影響。
圖4 任丘市2011年12月的預處理圖像
圖5 任丘市2017年4月的預處理圖像
經過預處理后進行灰度變化等特征提取,包括邊緣強度和方向角、次級特征提取、局部物體形狀和外觀表征、物體不確定度的測量、表面引入變化的測量,最終得到最可靠的特征。利用EBPNN方法進行分類。表1給出了Law掩模特征提取的9個紋理圖值,表2給出了Tamura特征的粗糙度、對比度和方向等特征。
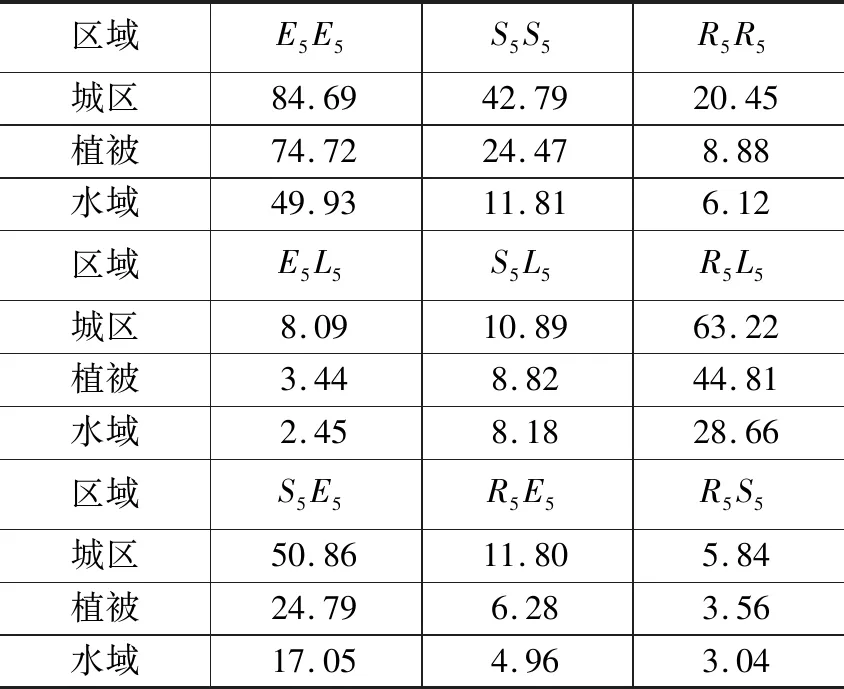
表1 Law掩模的9種濾波圖像特征

表2 Tamura特征圖像
圖6和圖7給出了任丘市2011年12月和2017年4月圖像中的植被區域變化。
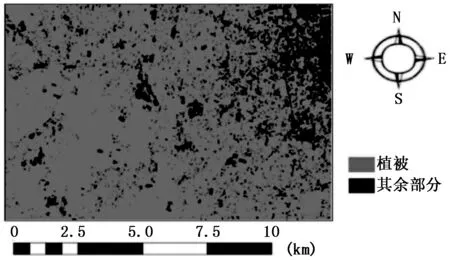
圖6 2011年12月圖像種植被區域變化檢測

圖7 2017年4月圖像中植被區域變化檢測
圖8和圖9給出了任丘市2011年12月和2017年4月圖像中的城區區域變化。從2017年4月的圖像中可以清楚地看到,與2011年12月相比,任丘市城區化影響比2017年4月有所增加。

圖8 2011年12月圖像中城區區域變化檢測
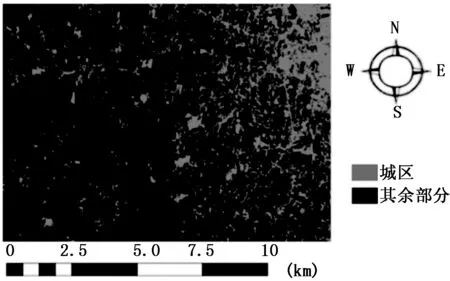
圖9 2017年4月圖像中城區區域變化檢測
任丘市2011年和2017年的水域變化比較如圖10和圖11所示。與2011年相比,2017年水域面積明顯減少。炎熱的夏季使各種水域惡化,給城區帶來了負面影響。2011年12月,水域清晰可見,在2017年4月的圖像中,水域惡化,基本無法觀測。夏季的影響和降雨量的減少對任丘市的水源產生了負面影響。
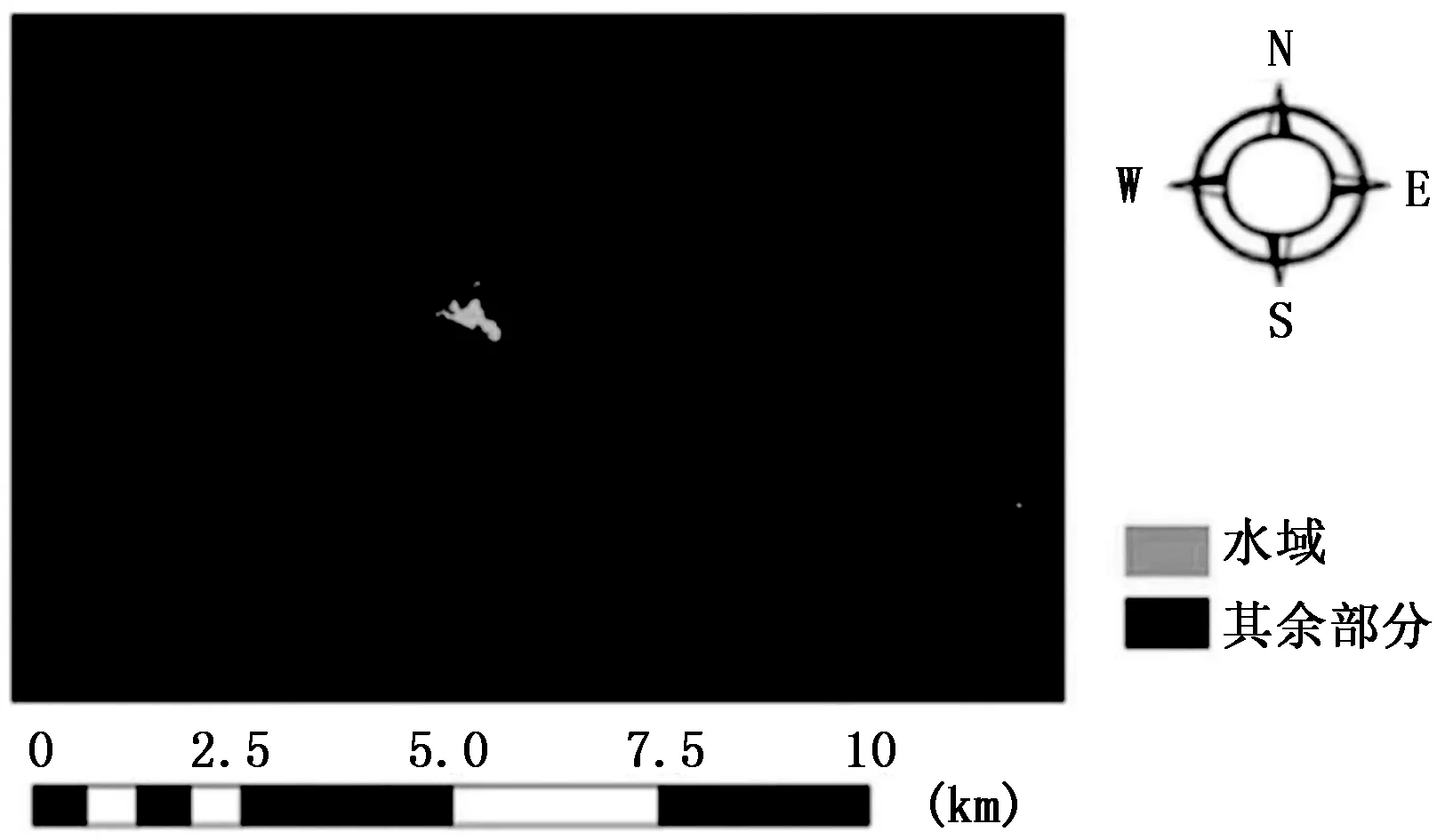
圖10 2011年12月圖像中水域區域變化檢測
圖11 2017年4月圖像中水域區域變化檢測
圖12和圖13給出了2011年12月和2017年4月任丘市的變化檢測圖。從圖12和圖13可以分析2011年和2017年植被的變化。由此產生的圖像顯示了2011年和2017年城市化的變化。從圖13可以清楚地看出,與2011年相比,2017年城區面積有所增加。

圖12 2011年12月圖像城市變化檢測

圖13 2017年4月圖像城市變化檢測
表3給出了植被、水域和城區區域等各種變化。在2011年,城區面積為148 877像素,2017年增加到216 253像素。因此,城市化對城區環境的變化產生了巨大的影響。在2011年,水域面積為57 965像素,2017年大幅減少到21 834像素。城市炎熱的氣候對水域產生了負面影響。在2011年,植被面積為743 894像素,2017年減少到712 649像素。

表3 在不同區域檢測到的變化
5.2 性能分析
本文選取TP、TN、FP、FN、FPR、FDR、PPV、NPV、靈敏度、特異性、Kappa、虛檢率、漏檢率和準確度作為評價指標。假陰性(FN)可以表征為變化的像素,即未被檢測到,而假陽性(FP)則由于未正確檢測到未更改的像素而被計算。真陰性(TN)表示真負數,即像素數準確表示為未改變,而真陽性(TP)表示真正值,即有效地分組為失真的像素數。通過以下公式評估指標:
1)正預測值
(14)
2)負預測值
(15)
3)靈敏度
(16)
4)特異性
(17)
5)準確度
(18)
6)假陽性率
(19)
實際的像素數量歸為未更改和更改過的類,其特征為Mu和Mc。則Kappa為:
(20)
其中:PCC為正確分類的百分比。且:
(21)
虛檢率為:
(22)
漏檢率為:
(23)
將文獻[15]提出的FFNN和文獻[16]提出的CNN與本文所提出的EBPNN進行比較,如表4所示。

表4 不同方法的性能比較
圖14給出了不同變化檢測方法之間的準確度、KAPPA和靈敏度的定量比較。與現有的FFNN和CNN方法相比,本文所提出方法在準確度、KAPPA和靈敏度都得到了提高。CNN的準確度為95%,FFNN的準確度為93%,而本文所提出的方法,EBPNN的準確度提高到了97%。因此,本文提出的EBPNN方法在精度上有了一定的提高。在對比現有方法CNN和FFNN時,所提出的EBPNN方法的KAPPA系數為0.840 3,虛檢率為0.023 4,漏檢率為0.013 5。通過有效的特征提取和EBPNN分類器,可提高變化檢測中的精度問題。

圖14 不同變化檢測方法的定量比較
6 結束語
為了更好實現遙感圖像的分類和檢測變化,本文提出了一種EBPNN分類器。在該方法中,將區域劃分為植被、水域和城區等不同的區域,識別每個類的變換并對變化進行分析。使用AMF預處理技術來消除圖像的噪聲。在此基礎上完成了Tamura特征和Law掩模特征的提取,最后利用具有變化檢測的EBPNN分類器算法進行分類。與現有的FFNN和CNN分類技術相比,利用EBPNN進行分類可以有效地檢測出圖像中的變化且具有更好的性能結果。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
噪聲與振動控制(2015年4期)2015-01-01 07:08:21