基于車體橫移振動的高速列車虛擬復合阻尼天棚控制算法研究
2021-04-02 03:33:10陳仁濤陳春俊
計算機測量與控制 2021年3期
關鍵詞:振動
陳仁濤,陳春俊,2
(1.西南交通大學 機械工程學院,成都 610031;2.軌道交通運維技術與裝備四川省重點實驗室,成都 610031)
0 引言
列車的高速化和輕量化使得列車輪軌耦合,流固耦合作用加大,車體結構剛度降低,彈性變形增大,使得車體橫向振動更加劇烈,并引發車體高頻振動,致使車體橫向運行平穩性變差[1-3]。現有研究表明半主動懸掛策略是抑制車體橫向振動,改善車體橫向運行平穩性的有效方法[4-9]。在現有高速列車半主動控制策略中,天棚阻尼控制算法以其結構原理簡單、控制效果好等優點,受到研究者的重點關注。傳統天棚阻尼控制是根據車體橫向振動速度大小來控制車體橫向振動,文獻[10]中指出傳統天棚阻尼控制能夠有效抑制車體的橫向振動速度,但是對車體橫向振動加速度的抑制效果不足。因此,要想改善車體橫向平穩性,提高半主動控制性能,需要對傳統天棚阻尼策略進行改進。
文獻[11]中指出高速列車車體合成橫向振動由橫移振動、側滾振動和搖頭振動三自由度合成,在一段時間內的不同時刻,三個振動分量之間的振動強弱和振動方向會展現出階段性的一致性或矛盾性,即在對車體橫向振動進行半主動控制時,當車體橫移振動得到抑制的同時,可能會加大車體的側滾振動和搖頭振動,從而使得半主動控制的性能降低。因此在對半主動懸掛控制策略進行改進時,還應充分考慮車體橫向振動特性對半主動控制效果的影響。
基于此,本文通過建立某型高速列車多剛體動力學模型,對車體橫向振動特性進行了研究,得出造成車體橫向合成振動加劇和平穩性惡化的主要原因為車體橫移振動加劇。通過分析在傳統天棚阻尼控制算法下分別以車體合成橫向振動和以橫移振動為反饋對車體橫向振動的控制效果,得出采用以車體橫移振動為反饋的傳統天棚阻尼控制算法對車體橫向振動的抑制效果更佳。在此基礎上,提出一種以車體橫移振動為反饋的虛擬復合阻尼天棚控制策略,并建立聯合仿真分析系統,對采用傳統天棚阻尼控制方法和采用虛擬復合阻尼天棚控制方法下的車體橫向振動控制效果進行研究,驗證本文提出的半主動控制策略的可行性和有效性。
1 高速列車動力學模型建立與橫向平穩性評價
1.1 高速列車多剛體動力學模型建立
運用Simpack建立某型高速列車動力學模型時,需將抗蛇形減振器、橫向止擋和輪軌接觸幾何關系等考慮為非線性關系。采用Kalker非線性蠕滑理論計算蠕滑力,車輪踏面和鋼軌分別選用選用LMA型車輪踏面和60 kg標準型鋼軌,軌道不平順由德國低干擾軌道譜生成。如圖1所示為利用Simpack建立的某型高速列車單節車輛多剛體動力學模型,除彈性、阻尼元件外的各個部件均視為剛體,對于車體、構架和輪對均考慮X、Y、Z3個方向的平移和轉動自由度。單節列車的動力學模型共42個自由度,其主要參數如表1所示。得到車輛的位移向量為:
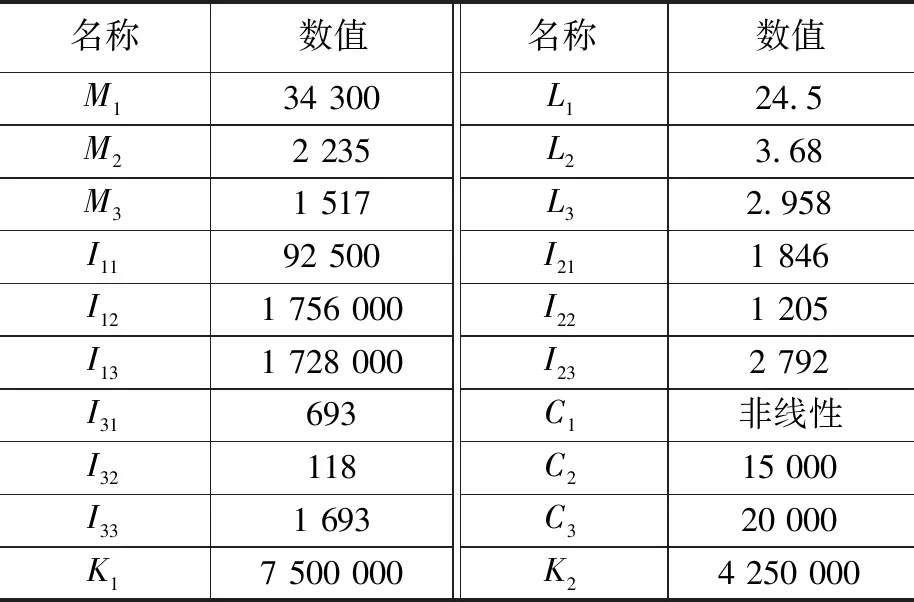
表1 某型高速列車主要參數列表
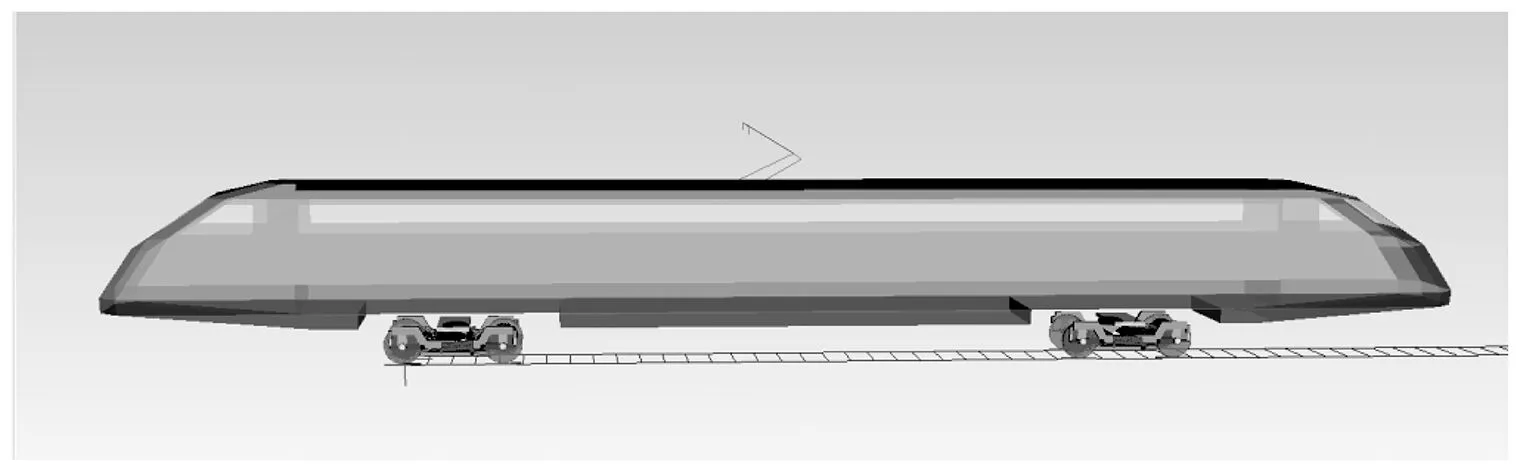
圖1 單節車輛多剛體動力學模型
(1)
根據Lagrange原理車體系統動力學方程可表示為:
(2)
式中,Mv、Cv和Kv分別為42×42的質量矩陣、阻尼矩陣和剛度矩陣。Fev為由軌道不平順引起的作用在輪對上的等效力。
表中l1、l2、l3分別為車體長度、高度和寬度(單位:m);M1、M2、M3分別為車體、構架和輪對質量(單位:kg);I11、I12和I13分別為車體側滾、點頭和側搖轉動慣量(單位:kg·m2);I21、I22和I23分別為構架側滾、點頭和側搖轉動慣量(單位:kg·m2);I31、I32和I33分別為輪對側滾、點頭和側搖轉動慣量(單位:kg·m2);C1、C2和C3分別為抗蛇形減振器阻尼、二系垂向減振器阻尼和二系橫向減振器阻尼(單位:N·s·m-1);K1和K2分別為二系垂向減振器剛度和二系橫向減振器剛度(單位:N·m-1)。
1.2 橫向平穩性評價指標
平穩性的好壞關系著高速列車的運行品質,決定了乘坐人員的舒適性。國內外常用加速度均方根值(RMS值)、UIC513舒適度標準和Sperling平穩性指標等指標對列車平穩性進行評價。本文選擇Sperling平穩性值作為列車橫向平穩性評價指標,其計算公式如下所示:
(3)
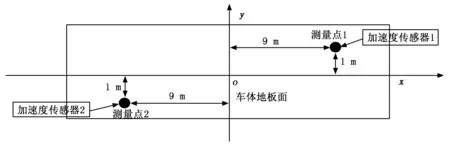
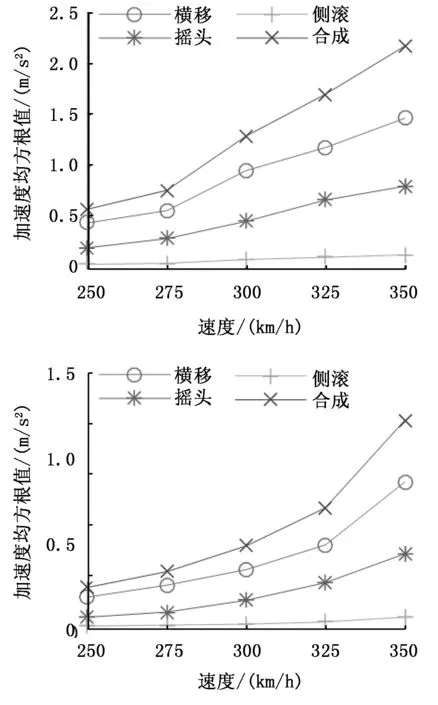
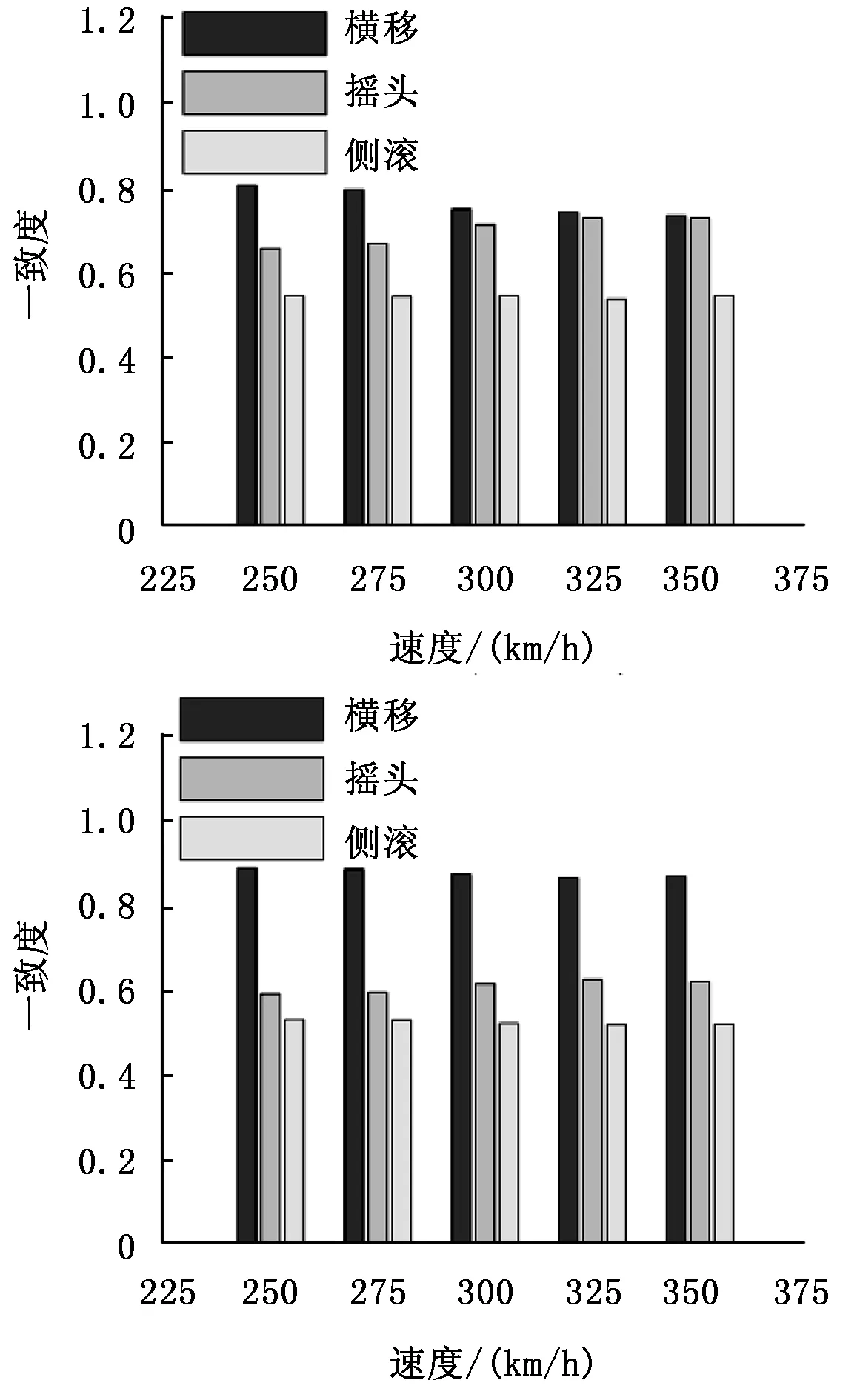
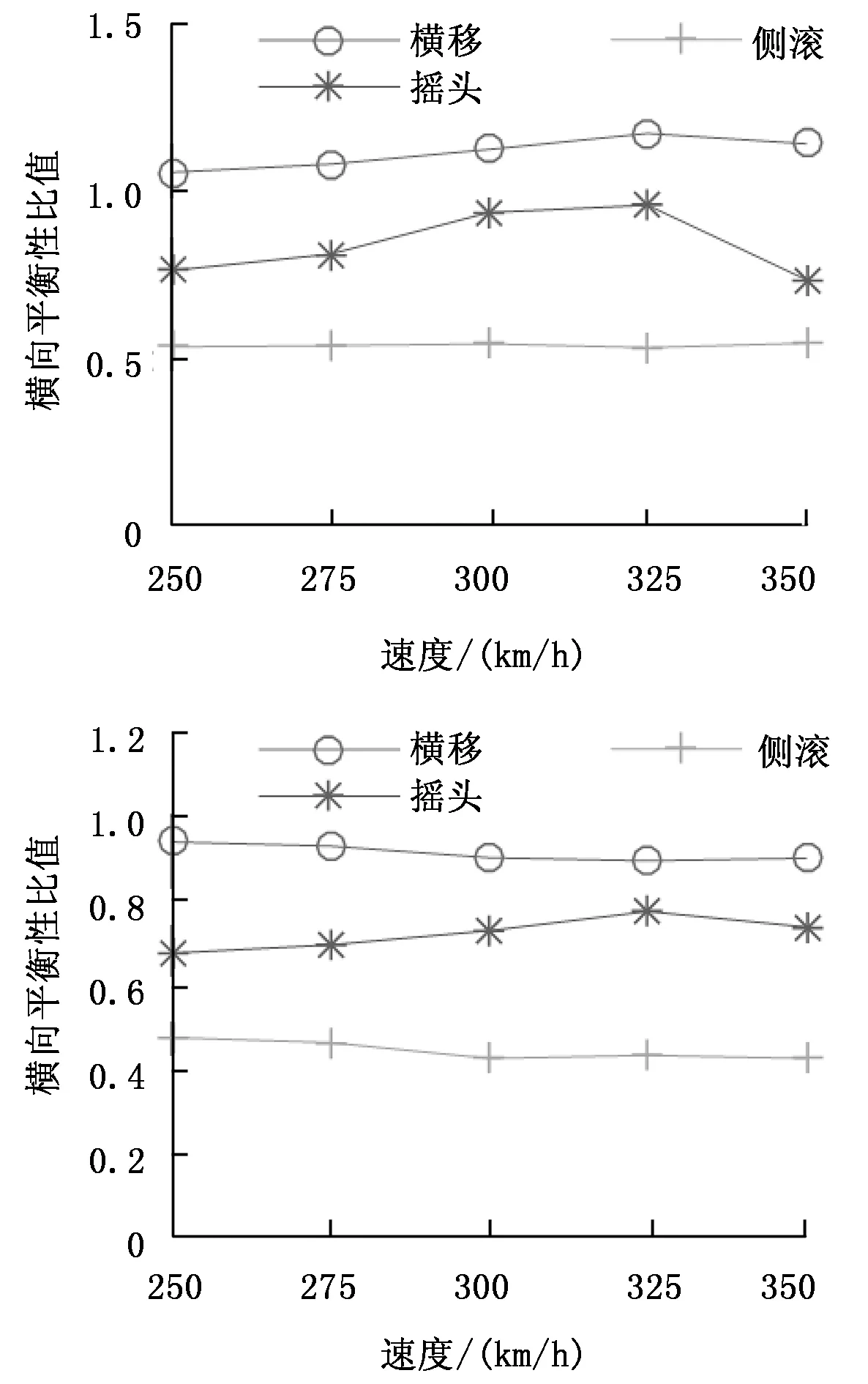
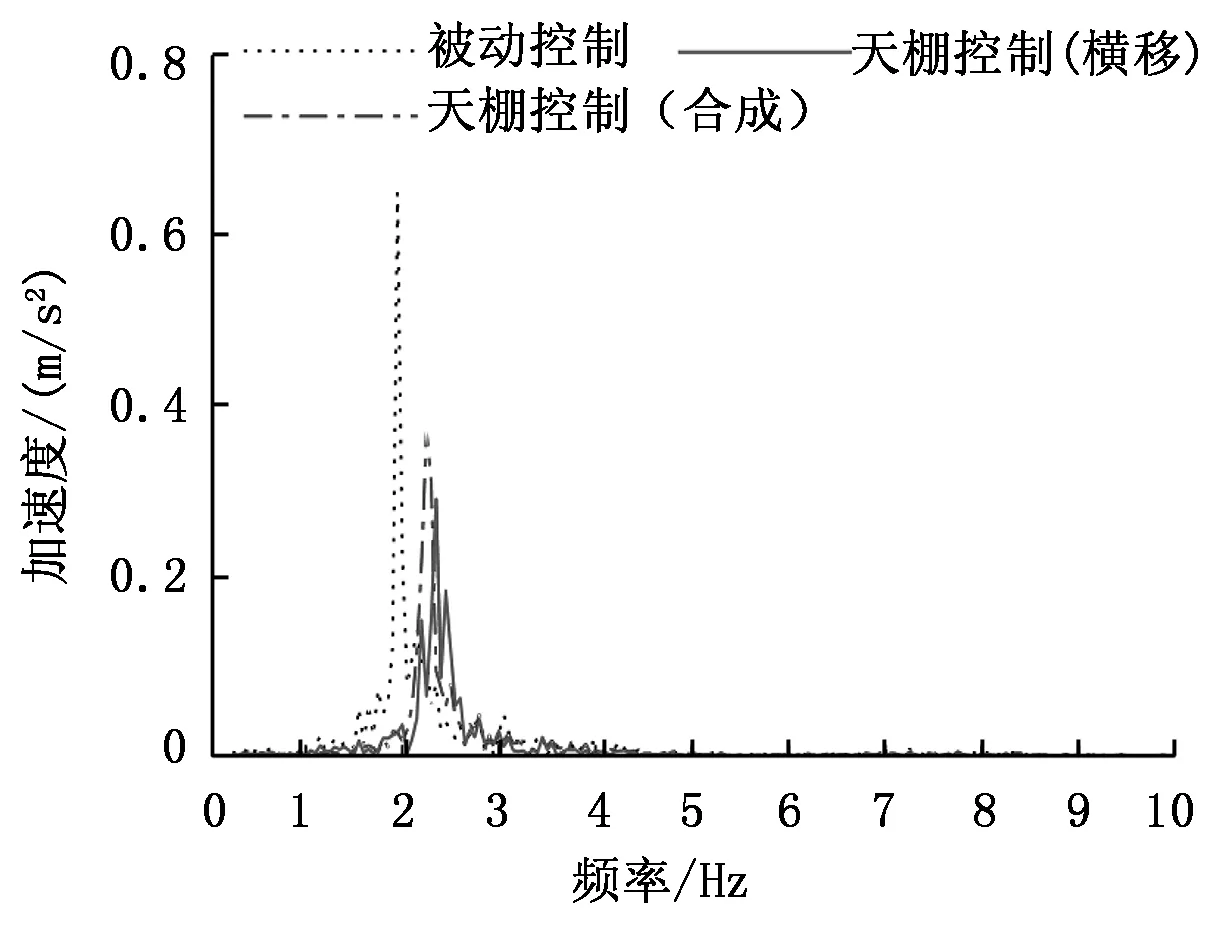
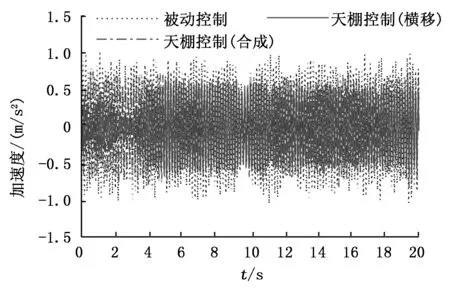
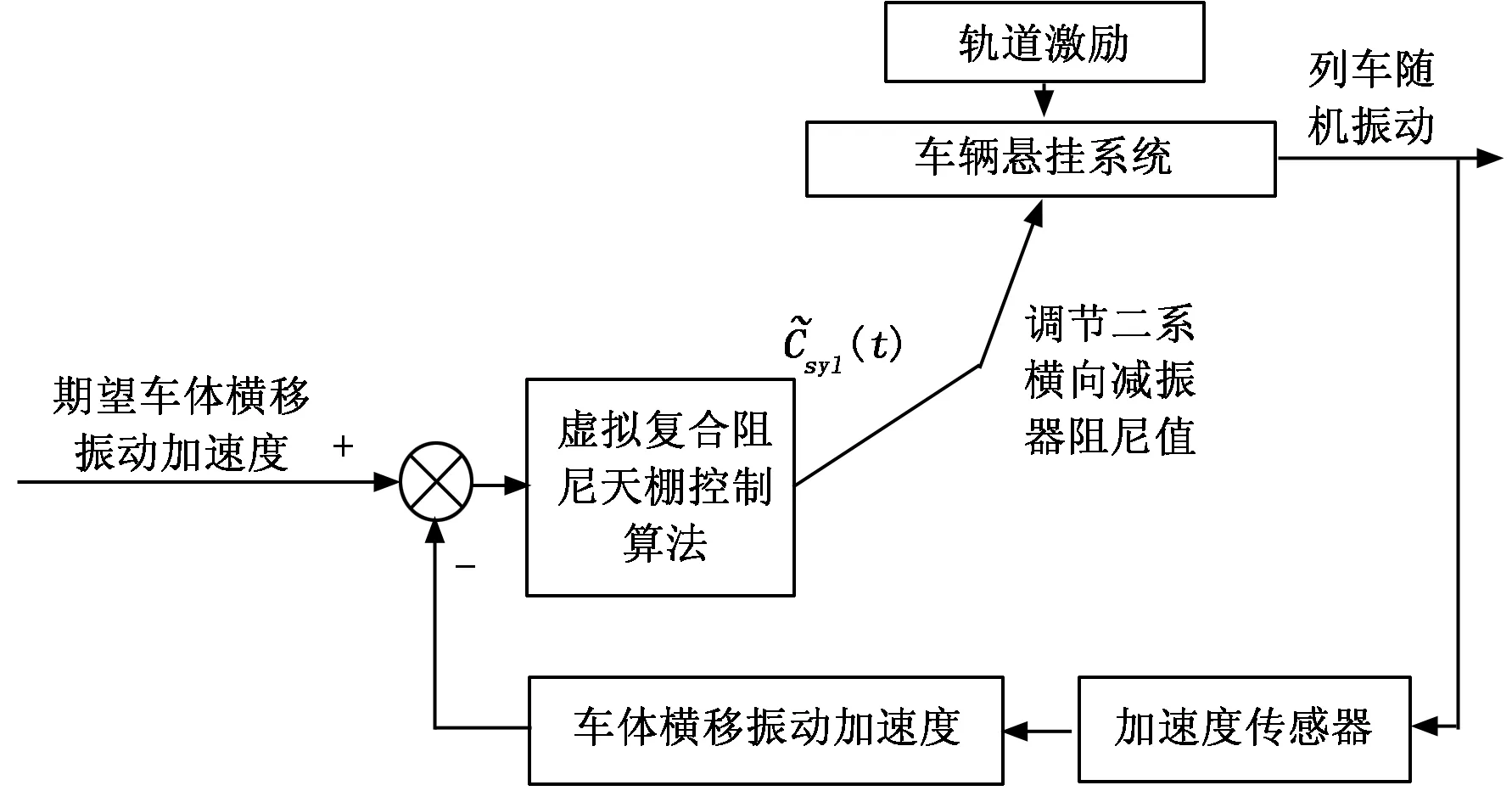
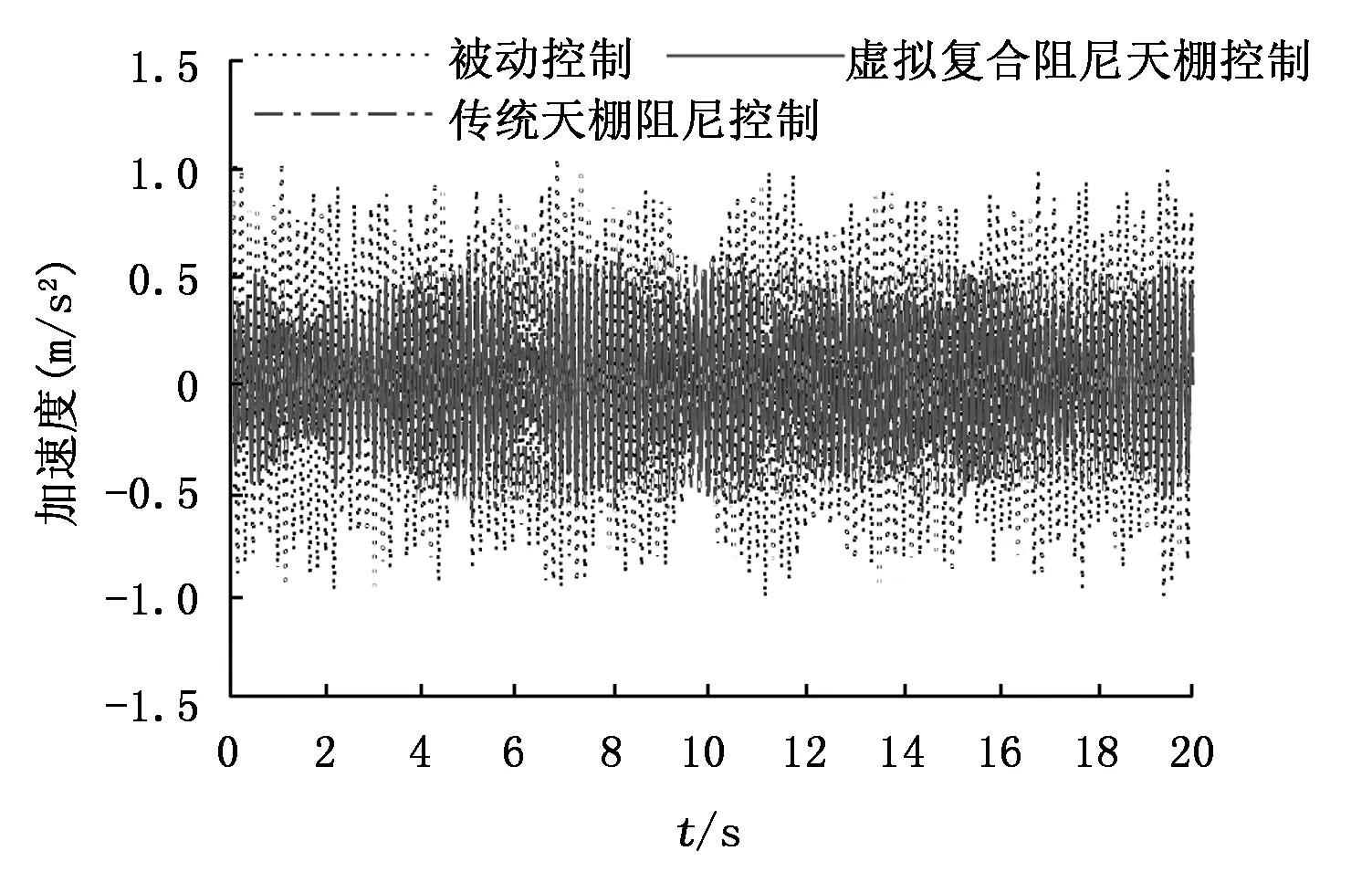
式中,W為平穩性指標;a為車體橫向振動加速度;f為振動頻率;F(f)為頻率修正系數;GB/T5599-1985《鐵道車輛動力學性能評定和試驗鑒定規范》中規定:當W<2.5時,評價等級為優,2.5 高速列車車體合成橫向振動由車體的橫移振動、側滾振動和搖頭振動三自由度合成,是影響乘客乘坐舒適性的主要因素。如圖2所示為車體橫向振動加速度傳感器安裝位置,其中車體前端測量點1和車體后端測量點2為GB/T5599-1985《鐵道車輛動力學性能評定和試驗鑒定規范》標準中規定車體橫向振動加速度的測量點。 圖2 車體橫向振動加速度傳感器安裝位置 利用多體動力學仿真分析軟件Simpack仿真分析時,測量點1和測量點2的橫移振動加速度分量、側滾振動加速度橫向分量和搖頭振動加速度橫向分量可由加速度傳感器1和加速度傳感器2測量得到。測量點1和測量點2橫向振動分量與合成橫向振動之間的關系如式(4)所示: (4) 式中,a1(t)和a2(t)分別為測量點1和測量點2的車體合成橫向振動加速度,ay1(t)和ay2(t)為測量點1和測量點2的橫移振動加速度分量,aφ1(t)和aφ2(t)為測量點1和測量點2的側滾振動加速度橫向分量,aφ1(t)和aφ2(t)為搖頭振動加速度橫向分量。 車體橫移、側滾和搖頭振動與合成橫向振動之間的一致度和矛盾度大小,能夠反映出在合成車體橫向振動時,是抵消還是加劇作用。為了更好地抑制車體橫向振動,改善列車車體橫向平穩性,提高橫向平穩性改善率,有必要對車體橫向內部振動與合成橫向振動的一致度和矛盾度進行分析,找出影響車體橫向平穩性的主要因素,從而針對性地對其進行控制,以提高半主動控制的性能。文獻[12]中詳細介紹了車體橫向內部振動分量與合成橫向振動之間的矛盾度求解方法,其計算公式如式(5)所示: (5) 式中,n=(1,2)分別表示測量點1和測量點2。ds(an,ayn)為合成橫向振動與橫移振動之間的矛盾度。ds(an,aφn)為合成橫向振動與側滾振動橫向分量之間的矛盾度。ds(an,aφn)為合成橫向振動與搖頭振動橫向分量之間的矛盾度。 (6) 式中,cs(an,ayn)為合成橫向振動與橫移振動之間的一致度,cs(an,aφn)為合成橫向振動與側滾振動橫向分量之間的一致度,cs(an,aφn)為合成橫向振動與搖頭振動橫向分量之間的一致度。 為了研究造成車體合成橫向振動和橫向平穩性惡化的主要因素,本文對不同速度下的車體內部橫向振動特性進行仿真分析。仿真時采用德國低干擾軌道譜生成的橫向和垂向軌道軌道不平順作為軌道激勵,列車運行速度分別設置為250 km/h、275 km/h、300 km/h、325 km/h和350 km/h,仿真時間20 s。如圖3和圖4所示為不同速度下測量點1和測量點2的橫向振動加速度峰值和均方根值,由圖3可知,測量點1的橫移振動加速度峰值和均方根值不僅大于搖頭振動加速度橫向分量和側滾振動加速度橫向分量的峰值和均方根值,還大于車體合成橫向振動加速度的峰值和均方根值。由圖4可知,測量點2的車體橫移振動加速度的峰值和均方根值與車體合成橫向振動加速度的峰值均方根值最為接近,且都明顯大于搖頭振動加速度橫向分量和側滾振動加速度橫向分量的峰值和均方根值。 圖3 測量點1橫向振動加速度峰值和均方根值 圖4 測量點2橫向振動加速度峰值和均方根值 如圖5所示為不同速度下測量點1和測量2的橫向內部振動加速度與合成橫向振動加速度之間的一致度,由圖5可知,不管是車體前端測量點1,還是車體后端測量點2的車體橫移振動加速度與合成橫向振動加速度之間的一致度都最高。可見,車體橫移振動加劇是造成車體橫向合成振動惡化的主要原因。 圖5 車體內部矛盾關系 如圖6所示為不同速度下分別以測量點1和測量點2的各橫向振動加速度分量與合成橫向振動加速度求解得到的橫向平穩性值之間的比值。由圖6可知,以車體橫移振動加速度求解得到的橫向平穩性值與以合成橫向振動加速度求解得到的橫向平穩性值之間的比值明顯大于以搖頭振動加速度橫向分量、側滾振動加速度橫向分量求解得到的橫向平穩性與以合成橫向振動求解得到的橫向平穩性之間的比值。說明造成車體橫向平穩性惡化的主要因素也是車體橫移振動加劇。 圖6 橫向振動分量與合成橫向振動平穩性比值 由2.3節分析可知,引起車體合成橫向振動和橫向平穩性惡化的主要原因為車體橫移振動加劇,因此為了改善列車橫向運行平穩性,提高半主動控制性能,將利用Matlab和Simpack對傳統天棚阻尼控制算法下,分別以車體合成橫向振動和以橫移振動為反饋的控制效果進行聯合仿真分析。仿真時以德國低干擾軌道譜生成的橫向和垂向軌道不平順作為軌道激勵,仿真運行速度設置為350 km/h,仿真時間20 s。 傳統天棚阻尼控制算法是根據車體的合成橫向振動速度大小來控制車體橫向振動,傳統天棚阻尼控制算法的控制規律為[13-14]: (6) 如圖7和圖8所示分別為不同控制策略下的車體合成橫向振動加速度頻域圖和時域圖,由圖7可知,車體合成橫向振動加速度頻率主要集中范圍為低頻段的2~3 Hz,被動控制下的橫向振動加速度幅值最大,以車體合成橫向振動為反饋的傳統天棚半主動控制下的橫向振動加速度幅值次之,以車體橫移振動為反饋的傳統天棚半主動控制下的橫向振動加速度幅值最小。 圖7 不同控制方法下車體合成橫向振動加速度頻域圖 由圖8可知,采用傳統天棚半主動控制后,車體合成橫向振動加速度得到了明顯抑制。結合表2可知,采用以車體合成橫向振動為反饋的傳統天棚阻尼控制后,車體橫向振動加速度峰值、均方根值和平穩性值分別由被動控制下的1.04 m/s2、0.55 m/s2和2.76分別降低到了0.77 m/s2、0.38 m/s2和2.43,善率分別為26%、23%和12.0%。采用以車體橫移振動為反饋的傳統天棚阻尼控制后,車體橫向振動加速度峰值、均方根值和平穩性值分別由被動控制下的1.04 m/s2、0.55 m/s2和2.76分別降低到了0.65 m/s2、0.33 m/s2和2.36,善率分別為37%、40%和14.4%。 表2 不同控制方法下車體合成橫向振動加速度峰值、均方根值和平穩性比較 圖8 不同控制方法下車體合成橫向振動加速度時域圖 可見采用以車體橫移振動為反饋的傳統天棚阻尼控制算法對車體橫向振動的控制效果優于采用以車體合成橫向振動為反饋的傳統天棚阻尼控制算法。 由2.4節分析可知,相比于采用車體合成橫向振動為反饋的傳統天棚阻尼控制算法,采用車體橫移振動為反饋的傳統天棚阻尼控制算法對車體橫向振動的控制性能更佳。然而,傳統天棚阻尼控制雖然能夠有效抑制車體的橫向振動速度,但是對車體橫向振動加速度的抑制效果不足。基于此,本文提出一種根據車體橫移振動加速度大小來控制車體橫向振動的虛擬復合阻尼天棚控制算法,其結構原理框圖如圖9所示。 圖9 虛擬復合阻尼天棚控制結構原理框圖 設Csy_k1、Csy_c1、Csy_m1分別為天棚彈性阻尼、天棚傳統阻尼和天棚慣性阻尼,復合阻尼天棚控制下的阻尼值Cz1=Csy_k1+Csy_c1+Csy_m1,則以車體橫移振動為反饋的虛擬復合阻尼天棚控制算法的控制規律為: (7) 其中: (8) (9) (10) 在實際工程應用中,利用如圖2所示的加速度傳感器1和傳感器2能夠測得車體合成橫向振動加速度,而車體橫移振動加速度則可通過車體合成橫向振動加速度值間接求得。測量點1和測量點2的橫移振動加速度大小相等,方向相同。側滾振動加速度橫向分量大小相等,方向相反。搖頭振動加速度大小相等,方向相反。因此將公式(4)進行變換后可得車體橫移振動加速度為: (11) 為了驗證本文提出的虛擬復合阻尼天棚控制算法的可行性和有效性,將利用Matlab和Simpack對采用虛擬復合阻尼天棚控制算法下的控制效果進行聯合仿真分析,仿真時以德國低干擾軌道譜生成的橫向和垂向軌道不平順作為軌道激勵,仿真運行速度設置為350 km/h,仿真時間20 s。如圖10所示為不同控制方法下車體合成橫向振動加速度時域圖,由圖可知,采用虛擬復合阻尼天棚控制對車體橫向振動的抑制效果更佳明顯。結合表3可知,采用虛擬復合阻尼天棚控制后,車體合成橫向振動加速度峰值、均方根值和平穩性分別由被動控制下的1.04 m/s2、0.55 m/s2和2.76分別降低到了0.56 m/s2、0.29 m/s2和2.23,改善率分別為46%、43%和19.5%。可見采用虛擬復合阻尼天棚控制策略在抑制車體橫向振動,改善車體橫向平穩性方面優于采用傳統天棚阻尼控制。 圖10 不同控制方法下車體合成橫向振動加速度時域圖 表3 不同控制方法下車體合成橫向振動加速度峰值、均方根值和平穩性比較 1)通過對不同速度下的車體橫向振動特性進行分析,得出車體橫移振動加劇是造成車體合成橫向振動和橫向平穩性惡化的主要原因。 2)通過分析采用以車體合成橫向振動和以橫移振動為反饋的傳統天棚阻尼控制算法對車體橫向振動的抑制效果,得出以橫移振動為反饋的傳統天棚阻尼控制算法對車體橫向振動的控制性能更好。 3)通過分析采用傳統天棚阻尼控制算法和采用虛擬復合阻尼天棚控制算法對車體橫向振動的抑制效果,得出采用虛擬復合阻尼天棚控制算法在抑制車體橫向振動,改善車體橫向平穩性方面優于采用傳統天棚阻尼控制算法。2 車體橫向振動特性分析
2.1 車體橫向內部振動與合成橫向振動關系
2.2 車體橫向內部振動與合成橫向振動的矛盾度與一致度

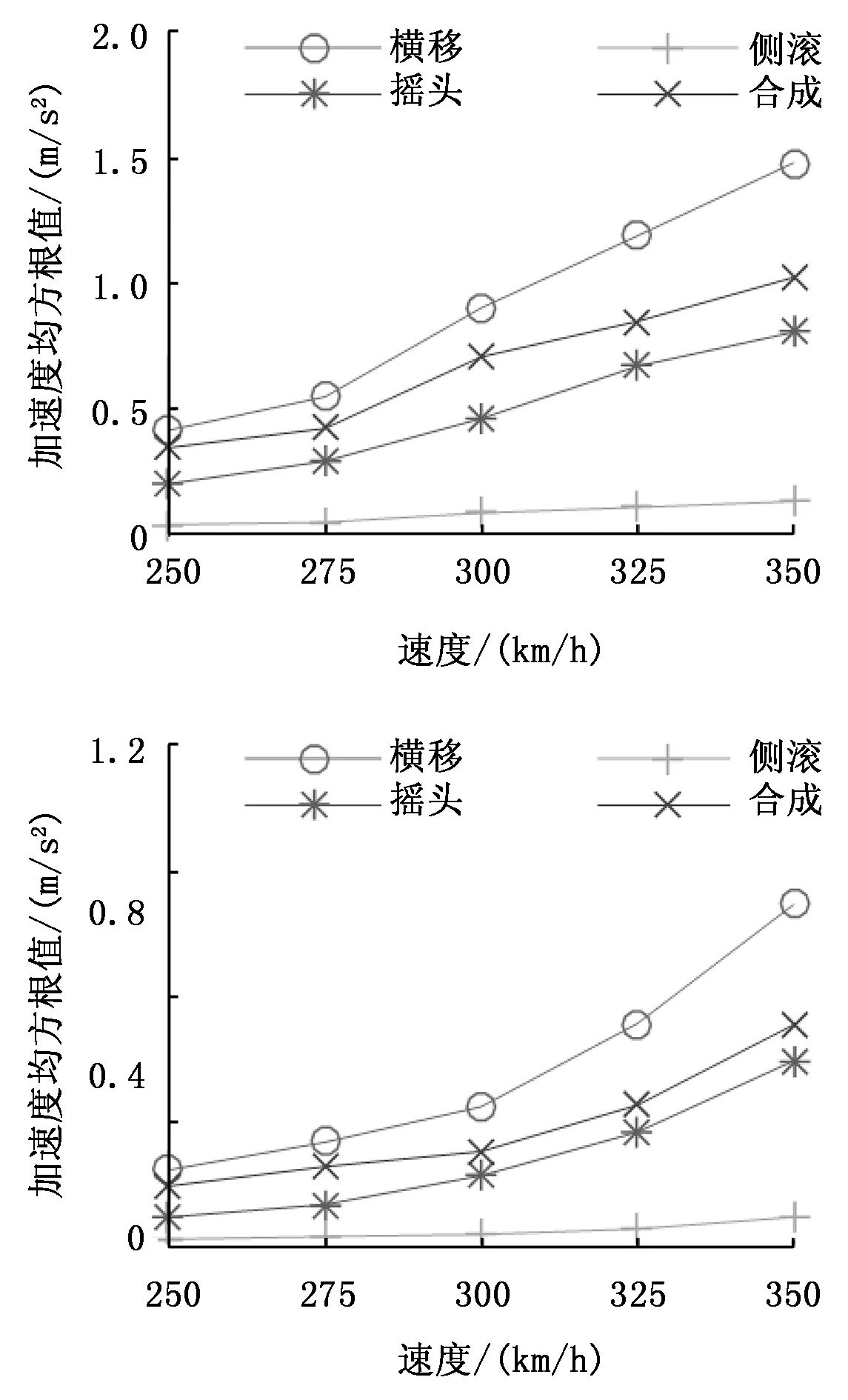
2.3 車體橫向振動特性仿真分析
2.4 不同反饋變量下的車體橫向半主動控制效果分析


3 虛擬復合阻尼天棚控制算法

4 橫向振動半主動控制效果分析

5 結束語
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00