基于二次雷達的列車輔助防護技術應用研究
2021-04-04 10:48:17王延翠楊麗麗王田農田慶
現代信息科技 2021年18期
王延翠 楊麗麗 王田農 田慶

摘? 要:文章介紹并對比了現有GNSS、激光雷達、一次雷達、二次雷達等常用列車測距技術手段。結合列車輔助防護需求和典型應用實例,介紹了基于二次雷達測距技術的列車輔助防護系統一般構成、工作原理、關鍵技術和工程化實施方案,針對基于二次雷達的列車輔助防護技術應用難點及問題進行了分析和總結,并對其未來技術發展方向進行了展望。
關鍵詞:列車測距;二次雷達;輔助防護
中圖分類號:TN958.96;U270.2 ? 文獻標識碼:A 文章編號:2096-4706(2021)18-0051-05
Abstract: GNSS, LiDAR, primary radar, secondary radar and other common train ranging techniques are introduced and compared. Combined with train auxiliary protection requirements and typical application examples, this paper introduces the general composition, working principle, key technology and engineering implementation scheme of train auxiliary protection system based on secondary radar ranging technology. The application difficulties and problems of train auxiliary protection technology based on secondary radar are analyzed and summarized, and its future technical development direction is prospected.
Keywords: train ranging; secondary radar; auxiliary protection
0? 引? 言
列車的運行安全保障一直是軌道交通行業的重中之重,正常情況下,列車防護功能主要由列車自動防護系統(ATP)負責,但當ATP切除后,列車防護將全權交由司機負責,在列車通過隧道或小曲線段時視覺嚴重受限,行車時缺乏設備保障,為此,近年來涌現出多種測距手段應用于非ATP模式下的列車輔助防護。
列車行駛過程中面臨隧道、彎道、坡道等復雜線路條件,以及雨雪霧等各種天氣條件,如何實現前后列車實時有效測距和危險車距準確評估是本文的重要內容,通過實際應用案例介紹和總結,希望對列車測距技術和輔助防護技術的后續應用提供一定借鑒和參考。
1? 列車測距技術發展現狀
目前用于列車測距輔助防護的技術手段主要有GNSS定位、視頻圖像、激光雷達、一次雷達和二次雷達等。
1.1? GNSS定位
利用全球衛星定位系統(GNSS)結合多傳感器技術融合的方法[1]來實現列車自主定位,再通過車-車或者車-地通信技術實現列車間的信息傳輸,傳輸的信息內容包括列車運行的速度、方向、公里標、線路號、時間戳等,獲得列車的位置信息之后,對前后車動態距離進行計算,當兩車間動態距離小于預先設定的安全預警限值時,系統將通過無線通信網絡向后車發送預警信息[2]。車載設備根據接收到的預警信息,在安全預警顯示設備上向司機給出當前狀態的提示,為司機操作提供輔助。
GNSS定位可以有效利用現有GPS、北斗、移動通信等平臺資源,建設費用較低,可在全鐵路網的車輛上進行推廣。其缺點是GNSS在隧道內,或者地形比較復雜的地方信號較差;系統依靠移動通信資源進行數據交互,系統復雜,可靠性不夠;鏈路傳輸時延大,實時性不夠。
1.2? 視覺圖像
利用視覺圖像的輔助防護系統一般包含長焦和廣角兩個攝像頭,長焦可見距離較遠,在長直道具有優勢,廣角視距較近,但視角更開闊,適合于彎道、道岔等車速較低,視野較狹窄的場景。在列車運行過程中,長焦和廣角同時采集視頻,通過攝像頭反饋的圖像可識別出前方是否為道岔場景,并對列車前方限界內物體(包括列車、道岔、信號機、障礙物等)基于語義分割的軌道及列車識別技術進行障礙物(列車)檢測和可見度計算給出識別結果。通過視頻處理算法可以對識別出的前方物體進行測距及運動趨勢判斷,并能通過標注訓練,識別出障礙物類型[3]。
視覺測距的主要問題是受天氣影響嚴重,在大霧,大雨天氣下無法使用。在夜間效果也很差,如果使用紅外遠距離攝像頭可提升性能,但價格很高,同時視頻設備組成復雜,可靠性較低,標注訓練周期較長。
1.3? 激光雷達
激光雷達,是以發射激光束探測目標的位置、速度等特征量的雷達系統。其工作原理是向目標發射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,做適當處理后,就可獲得目標的有關信息。激光雷達通過脈沖信號測量前方物體距離。
激光雷達的特點是帶寬大,目標分辨率高,可以獲得極高的角度、距離和速度分辨率[4]。通常角分辨率不低于0.1 mard也就是說可以分辨3 km距離上相距0.3 m的兩個目標,并可同時跟蹤多個目標,距離分辨率可達0.l m,速度分辨率能達到10 m/s以內。距離和速度分辨率的提高可以獲得目標的清晰圖像。激光雷達的缺點是價格較高,探測距離太近,受限于1 km以內,受天氣影響較大,在大霧天氣下性能下降較快,目前多用于地面測繪,自動駕駛。
1.4? 一次雷達
目前用的一次雷達主要是毫米波雷達,就是工作在毫米波頻段的雷達。毫米波是指長度在1~10 mm的電磁波,對應的頻率范圍為30~300 GHz。毫米波雷達測距原理就是把無線電波(毫米波)發出去,然后接收回波,根據收發的時間差測得目標的位置數據和相對距離。根據電磁波的傳播速度,可以確定目標的距離為:s=ct/2,其中s為目標距離,t為電磁波從雷達發射出去到接收到目標回波的時間,c為光速。
普通發射功率12 dBmW的毫米波雷達作用距離可達1.2 km,該雷達距離分辨率高,可識別目標大小,有成像應用,但技術還不成熟,且在彎道情況下無法使用,目前多用于自動駕駛領域的近距離測距[5,6]。
1.5? 二次雷達
與毫米波雷達這種一次雷達不同,二次雷達(Secondary Surveillance Radar, SSR)是由詢問雷達和應答雷達所組成的無線電電子測位和辨認系統。工作時由詢問雷達發射電磁波,應答雷達接收到詢問電磁波后被觸發,繼而發射應答電磁波,詢問雷達根據接收到的應答電磁波,實現識辨,并根據發送和接收信號的時間間隔計算前后間距[7]。二次雷達性能穩定,可在隧道、彎道多種工況下使用,誤警率低。
1.6? 測距技術比較
列車輔助防護需要留有足夠的制動距離用于預警,視覺圖像和激光雷達探測距離太近應用較少,主要采用GNSS定位、一次雷達和二次雷達這三種方式,主要優缺點如以下所示。
GNSS定位:通過GNSS衛星信號來獲取列車的運行狀態信息,在隧道等環境下借助里程計(或渦流傳感器、慣性導航儀和陀螺儀等傳感器)得到列車的位置信息,再通過車-車通信或者車-地通信方式與前后車進行數據傳輸,從而實現彼此車距測量。這種方式由于傳感器數據容易產生累積誤差,從而影響到列車的定位精度。
一次雷達:利用雷達測量前后車相對距離信息,再根據距離信息做相應預警判斷。一次雷達當發現前方有目標時就會進行報警,這種方式在隧道內、彎道、坡道受到諸多限制,極易發生誤報警。
二次雷達:基于二次雷達測距獲得前后兩車相對距離信息,這種方法目前在城市軌道交通領域已有應用,同基于GNSS定位的手段相比,可應用于隧道中,且測距實時性大幅提高,目前的問題是能夠測量的距離比較近,僅適用于低速列車使用。二次雷達采用應答方式通信,與一次雷達相比,在發射功率相等的前提下,作用距離大大提高。
隨著技術的發展,列車測距輔助防護系統必然是多種傳感器的融合,相互取長補短。二次雷達由于具備探測距離長和探測精度高的優點,在多種測距技術中占有非常重要的位置[8]。
2? 基于二次雷達的列車輔助防護技術典型應用
基于二次雷達測距的列車輔助防護技術,近年來已經在城市軌道交通領域展開廣泛應用。隨著鐵路運輸持續向更高速度和更高密度方向的發展,圍繞ATP切除模式下為司機提供列車輔助防護功能需求,采用二次雷達測距技術對前方列車進行實時探測、身份識別和信息提取,結合列車狀態監控和制動能力,實現危險預判和報警提示,可為司機安全駕駛提供有力保障。
2.1? 列車輔助防護系統構成及工作原理
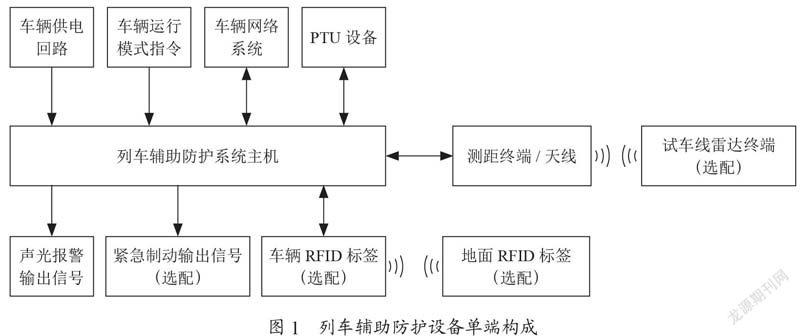
基于二次雷達的列車輔助防護系統一般由列車首端設備和尾端設備構成,二者構成完全相同,通過車輛硬線信號或網絡通信數據辨別各自所在車廂號。單端設備典型構成如圖1所示。
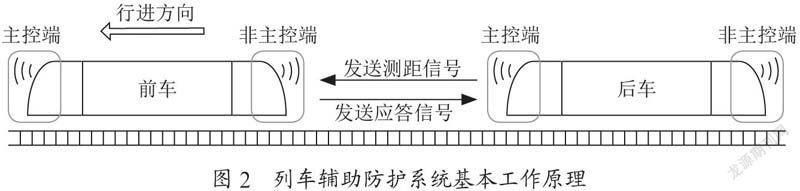
前后兩車各自安裝測距終端/天線后,通過無線信號相互通訊,在相應應答機制下,通過各自發送和接收信號的時間間隔計算兩車間距(如圖2所示),從而根據實時車距評估追尾風險,為司機提供有效輔助防護功能。
2.2? 列車輔助防護系統主要功能
2.2.1? 實時測距
列車輔助防護系統能夠實時測量本車與前車的距離,通過與網絡通信接口傳送給列車網絡系統(TCMS)進行前車實時車距顯示。
2.2.2? 接近列車身份辨別
列車輔助防護系統能夠根據車輛的提供上下行線路信息或讀取地面電子標簽信息,辨別接近列車是否與本車處于相同股道,僅針對同股道列車進行車距監測。
2.2.3? 危險車距評估及預警顯示
綜合考慮車輛制動能力、操作指令執行延時、前后車相對速度等因素,設置靜態、動態多級預警模型。非ATP模式下,列車輔助防護系統根據預警模型實時評估前車車距,當滿足預警條件時觸發聲光報警和TCMS報警提示。
2.2.4? 試車線防護
試車線運行的列車,在非ATP模式下,列車輔助防護系統實時測量本車與試車線兩端地面雷達設備距離,當與試車線兩端距離滿足預警條件時,為司機提供危險距離聲光警示或自動施加緊急制動。
2.2.5? 特殊場景防護
非ATP模式下,如需對車場線、車輛段、輔助線、存車線、折返線、交叉渡線等特殊運行場景進行危險車距評估,需要在車輛和地面安裝射頻標簽(RFID標簽),實現更加精準的位置辨識,配合實現特殊場景下的防護功能。
2.3? 關鍵技術工程化實施方案
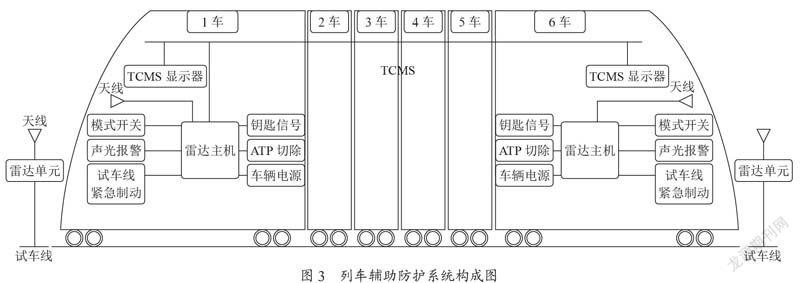
列車輔助防護系統主要由主機、測距模塊(包含天線)、試車線設備(雷達單元、電源模塊等)等組成,并設置模式開關和帶蜂鳴器的報警指示燈。系統構成如圖3所示。
列車輔助防護系統關鍵技術在于實時測距和危險車距準確評估,通過車輛控制功能集成設計實現相應場景下的輔助防護功能,具體實施方案如以下所示。
(1)模式選擇。通過操縱臺模式開關,可以人工選擇列車輔助防護系統的工作模式,分為正線防護模式、試車線防護模式和切除模式。
(2)實時測距。通過二次雷達測距模塊實時追蹤運行前方同一股道的列車,測量本車與前車的相對距離,開闊直線段測距能力>1 km,測距精度±5%。
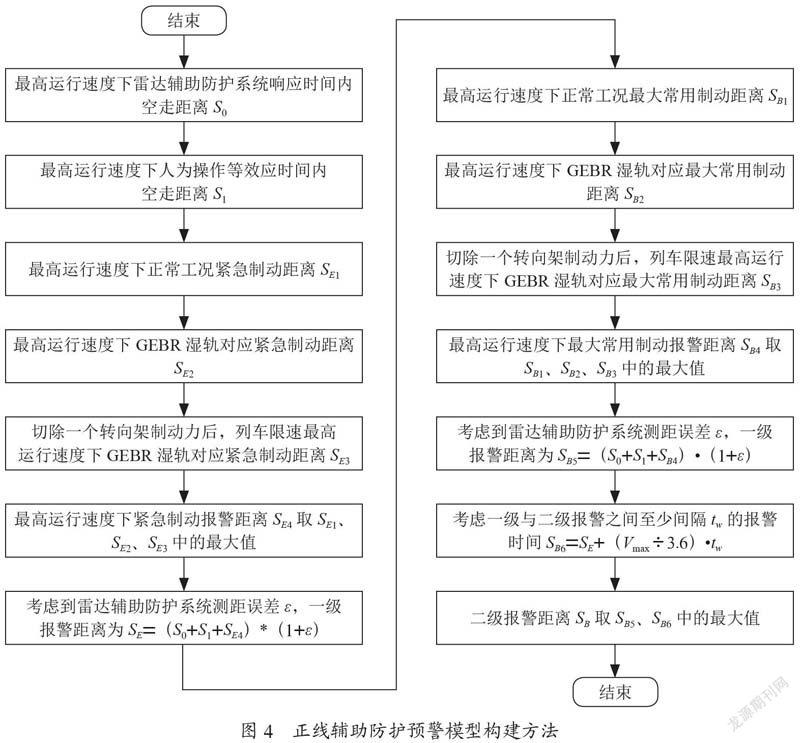
(3)危險車距評估。如圖4所示,正線輔助防護預警模型構建需兼顧列車輔助防護系統的測距能力和列車制動性能,兩級報警閾值需根據列車制動能力,在列車輔助防護系統可測距范圍內確保合理的制動距離,避免前后列車碰撞事故的發生。
(4)試車線防護。如圖5所示,試車線輔助防護預警模型構建采用劃分速度區段的方法,根據不同速度區段計算不同報警級別的報警閾值,預留合理的制動距離,避免列車沖出試車線事故的發生,并且可以充分利用試車線有效行車區間。
(5)預警顯示。通過司機室TCMS顯示屏提供信息顯示,包括實時車距顯示、安全距離兩級聲光警示、設備工作狀態和故障信息等。
2.4? 現車應用情況總結
經現車試驗和應用驗證,列車輔助防護系統能夠實現系統功能,但在調試過程中曾偶發測距距離跳躍以及測距通信中斷的問題,最終通過優化測距濾波算法得以解決,主要措施如下文所示:
(1)增加測距模塊時隙數量,確保測距終端接收到足夠多的測距數據,優化系統對測距距離數據的處理。
(2)優化測距模塊源代碼中數據處理流程,修正測距模塊算法,濾除異常的測距數據。
(3)增加閾值判斷,將異常無效數據篩選掉,避免無效數據對擬合濾波算法的干擾。
(4)增加均值濾波,將一定時間內接收到的有效距離值取平均作為有效值,濾波后,距離數據將更加平滑,增強對跳變數據的抗干擾能力。
3? 技術應用難點及問題
基于二次雷達測距原理的列車輔助防護系統逐步展開應用,隨之也暴露出一些問題有待研究攻克和持續優化完善。
3.1? 多目標識別和通信組網
二次雷達采用詢問和應答的方式建立彼此通信鏈接,特殊工況下本車前向雷達可同時檢測到多列車雷達信號,甚至包括本車尾端雷達信號,為此,從中準確辨別同股道前向列車尾端雷達信號,并確保與其建立穩定的通信鏈路尤為重要。
在現車應用中曾出現由于非目標雷達信號干擾占用通信資源,造成本車與目標雷達信號通信不穩定的情況,為此,有必要深入剖析其工作場景,綜合列車運用信息準確辨別目標列車,利用頻域和時域切割設計方法確保與目標對象的通信穩定性。
3.2? 輔助防護預警模型構建
輔助防護預警模型通常考慮車輛最大常用制動和緊急制動距離、系統響應及人為操作時間,以及實時車速或兩車相對速度等因素,通過多參量綜合計算,再加之考慮異常工況下制動安全系數,構建以距離為核心的輔助防護預警模型,是危險車距準確評估的基礎。
正線運行時,如無法實時可靠獲得車輛運行速度,輔助防護預警閾值一般采用固定值,即不隨車輛運行速度變化而變化,安全性較高;試車線運行時,因車輛可運行距離普遍較短(約為1~2 km),為最大化利用試車線有效運行距離,輔助防護預警閾值宜采用動態值,預警閾值將隨本車速度動態調整。
為起到輔助防護功能,通常設置兩級預警:Ⅰ級預警閾值以緊急制動距離為核心因素,當觸發預警條件時,提示司機/自動施加緊急制動;Ⅱ級預警閾值以最大常用制動距離為核心因素,當觸發Ⅱ級預警條件時,提示司機減速,加強瞭望并準備隨時停車。其中如若涉及自動施加緊急制動,則需輔助防護系統需輸出緊急制動指令,對系統可靠性和安全性要求較高。
3.3? 防護場景功能測試
列車輔助防護系統靜、動態測距功能,以及報警和顯示功能可通過地面測試或現車試驗進行雙重驗證,但針對隧道、彎道、坡道、交叉渡線等場景下的功能驗證卻較難實施,尤其對于各場景下多目標識別和通信穩定性很難通過環境模擬或線路試驗進行充分驗證。因此,需要在系統設計之初就預先考慮相應功能的完備測試方案,以提高系統可靠性和功能有效性。
3.4? 測距能力有待提高
列車輔助防護系統有效探測距離需滿足車輛制動距離及預警距離要求,對于最高時速80 km/h列車,一般要求直線測距距離不小于800 m;對于最高時速120 km/h列車,一般要求直線測距距離不小于1 000 m。即速度等級越高要求列車輔助防護系統的測距距離越長,并且雷達終端/天線一般安裝于車內,司機室前窗玻璃會對其起到一定的信號衰減作用。同時,其測距誤差也是一個重要測距性能指標,為保證測距、預警輸出的準確性,一般要求任何工況下測距誤差不超過5%,需要列車輔助防護系統考慮列車運行環境對測距精度的影響并采取校正措施。
4? 結? 論
基于二次雷達的列車輔助防護技術通過現車應用,將使其累積更多的實測數據和應用經驗,必將得到快速提升和完善,但在多場景多目標精準識別、輔助防護預警模型優化、測距距離和測距精度提高等方面仍存在較大提升空間,同時,也可通過融合其他感知信息,提高目標檢測準確率和系統可靠性。另外,由于處于技術應用初期階段,各種工程應用方案和硬件設備較為多元化,需結合實際應用和技術發展進行沉淀和總結,逐步形成規范化、標準化的集成應用方案,實現基于二次雷達的列車輔助防護系統工作頻段、系統架構、配置組成、機械及電氣接口等技術要求的統一,促進其批量推廣應用。
參考文獻:
[1] 陳韶霞,孫永明,劉立月.基于GNSS的高速列車多傳感器組合定位方法研究 [J].河北省科學院學報,2011,28(1):31-34+64.
[2] 王劍,蘇昱,蔡伯根,等.高速列車追蹤接近預警系統 [J].鐵道學報,2014,36(12):56-61.
[3] 盧文玉.基于視覺的車輛防撞預警研究 [D].南京:南京航空航天大學,2011.
[4] 汪洋.近程汽車激光防撞雷達研究 [D].哈爾濱:哈爾濱工業大學,2014.
[5] 柯振宇.基于毫米波雷達的車輛縱向碰撞預警系統設計 [D].武漢:武漢理工大學,2014.
[6] 劉海波,盛蒙蒙,楊曉倩.一種車載毫米波列車防撞雷達系統研究 [J].雷達學報,2013(2):234-238.
[7] 劉敏.基于ATP列車輔助追蹤預警系統研究[J].科技風,2017(11):69.
[8] 高岸梅.提高二次雷達系統識別概率和作用范圍的設想[J].信息技術與信息化,2014(4):186-187.
作者簡介:王延翠(1982—),女,漢族,吉林白山人,高級工程師,碩士研究生,研究方向:軌道交通車輛電氣系統集成設計及智能化技術應用。