“工業機器人編程與操作”課程混合式教學改革探索
2021-04-04 11:59:28楊柳曼萬麗琴
現代信息科技 2021年18期
楊柳曼 萬麗琴


摘? 要:隨著智能制造人才需求逐年增多,對培養學生綜合能力提出了更高的要求,如何將傳統的知識傳授為主的課堂轉變為以培養學生能力為主的課堂,從而提升學習效果成已成為核心問題。以“工業機器人編程與操作”課程為例,對混合式教學改革進行了研究、實踐和探索,形成“課前預習—課中練習—課后復習”教學活動緊密聯系的學習形式,強化綜合能力培養,深化育人效果。
關鍵詞:工業機器人;混合式教學;課程改革
中圖分類號:TP39;G642? ? ? ? ? ? ? ? ? 文獻標識碼:A 文章編號:2096-4706(2021)18-0191-04
Abstract: With the increasing demand for intelligent manufacturing talents year by year, higher requirements are put forward for cultivating students comprehensive ability. How to change the traditional classroom based on knowledge teaching into a classroom based on cultivating students ability, so as to improve the learning effect has become a core problem. Taking the course of “industrial robot programming and operation” as an example, this paper has studied, practiced and explored the blended teaching reform, forms a learning form that the following teaching activities are closely related together: pre class preview, in class practice and after class review, strengthens the cultivation of students comprehensive ability and deepens the effect of education.
Keywords: industrial robot; blended teaching; course reform
0? 引? 言
《中國制造2025》規劃中提出,要把智能制造作為信息化與工業化深度融合的主攻方向,其中工業機器人被認為是實現目標的關鍵,我國企業對這方面的人才需求逐年遞增[1]。當前,各大院校都開設了工業機器人相關課程,但在教學中仍然以傳統的教學方式居多,學生學習效果不理想[2]。混合式教學,最早是20世紀90年代在企業培訓中出現,是一種線上和線下學習結合的基本教學形式,將不同類型的學習資源、學習策略和學習活動進行有機融合,從而達到教育效益最優化的一種教學模式[3]。采用混合式教學,有助于學生加強課前預習,加深對課堂教學重難點的理解和靈活運用,更好地掌握基本技能,滿足未來對工業機器人技能人才的需求。
1? “工業機器人編程與操作”課程教學現狀
“工業機器人編程與操作”是一門智能制造專業群的核心課程,涵蓋了工業機器人基本操作、在線編程、離線編程、PLC應用、視覺檢測技術等知識點和技能點[4],是培養學生熟練掌握工業機器人操作技能、提升職業能力和素養的重要渠道。目前仍然采用傳統教學方法居多,教師演示操作過程,學生模仿教師操作反復練習直至熟練,這個模仿過程學生不需要自己思考,嚴重制約了學生學習效率,導致學生對知識的理解和應用有很大的局限性,職業技能和綜合能力并沒有得到很大的提高,教學質量難以達到顯著的效果。另一方面,大部分學校的工業機器人教學設備數量有限,每個學生動手操作的機會比較少,實操時間短,學生的實踐技能很難得到提升,并且高職學生的自制力和自主性都較差,專注力不夠,在其他學生操作的時候,一部分學生則覺得枯燥乏味、無所事事,影響教學效果[5]。因此,在教學中運用混合式教學,激發學生的學習興趣,更好地掌握專業知識技能,有效改變當前的教學現狀。
2? 教學內容重構與資源庫建設
傳統教材知識更新較慢,與當前工業機器人應用編程1+X證書技能要點融合不足[6],按照“學以致用”的原則,對“工業機器人編程與操作”進行任務式處理,實現以能力為本位,構筑職業和技能相融合、符合教學新需求的教學內容重構。將課程設計為“初識工業機器人”“工業機器人的基本操作”“工具坐標系的建立”“工件坐標系的建立”“IO板的配置及使用”“運動軌跡實驗”“五軸機床上下料綜合應用”七個學習任務。
為充分發揮混合式教學的優勢,重新整理教學資源,建設符合本校教學特色的教學資源庫。具體為:
(1)制作微視頻。以知識目標、能力目標、素質目標為依據,梳理每次課堂的重難點,錄制成微視頻,上傳至信息化教學平臺,方便學生課前預習、課后復習。
(2)設計電子任務工單。將新課堂中的重難點和學生已掌握的知識點串聯起來,制作電子任務工單發布給學生,課前學生根據工單明確學習任務,課中通過仿真練習、編程實操完成任務并記錄,課后反思總結、優化改進,實現任務工單貫穿教學全過程。
(3)軟硬件資源有效結合。課堂中利用工業機器人操作平臺、智能制造生產線和仿真實訓平臺教學,課堂外利用ABB RobotStudio、PQArt等離線仿真軟件真實再現機器人工作場景。gzslib2022040512103? 教學設計與實施
3.1? 教學策略
本課程采用“激趣”“創境”“釋疑”“鞏固”教學策略,“激趣”即通過視頻,案例等引導學生思考,激發學生自主學習的興趣;“創境”即創設工業機器人操作環境,借助案例鼓勵學生積極探索,合作學習;“釋疑”即學生在解決問題過程中遇到難以解決的問題,教師進行解答,“鞏固”即進行課中綜合實踐,從而提高學生的操作編程應用能力。
3.2? 整體教學設計
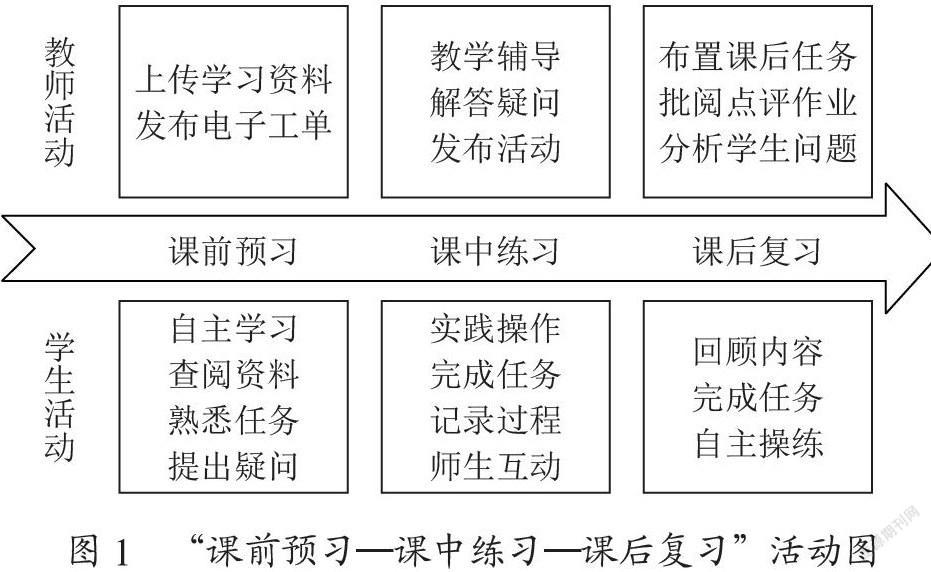
充分運用網絡教學平臺及資源和仿真實訓平臺及系統,開展“課前預習—課中練習—課后復習”的教學活動,如圖1所示,環環相扣,緊密聯系,保證教學效果。
具體為:
(1)課前預習:教師在課前做好課堂規劃,在網絡教學平臺上傳視頻、圖片、PPT、等多種學習資料,發布電子任務工單,引導學生完成課前信息收集和歸納、自主學習相應內容,將疑問記錄下來帶到課堂上釋疑。
(2)課中練習:遵循“學生練為主,教師教為輔”的教學理念,教師引導學生完成工單中的任務,解決學生在課前預習時遇到的問題。結合課堂測驗、頭腦風暴、小組討論、編程案例等教學活動,考查學生對相應知識的掌握情況,實時檢驗學習成果,動態調整教學策略。
(3)課后復習:教師在網絡學習平臺發布離線編程、拓展思考等任務,學生結合課堂知識點和學習資料在規定時間內完成任務,利用離線仿真軟件鞏固工業機器人操作技巧。學生的完成情況可在平臺上及時查看,教師通過批閱和點評作業,總結分析學生存在的薄弱點和典型性問題,并準備在下次課堂上進行講解和分析。
3.3? 教學實施過程
“工業機器人編程與操作”課程中,運動指令的應用和運動軌跡規劃是能夠實現工業機器人按照預設路徑進行自動運行的重要知識點和技能點。運動指令包括MoveJ、MoveL、MoveC、MoveAbsJ,每個指令中還有位置點、速度、轉彎半徑、工具坐標系和工件坐標系等參數的設置,這些指令的運動方式各有不同,參數設置的不同也會使運動軌跡發生變化。在教學過程中,若單純以傳統方式進行理論教學,學生很難直觀地理解各種運動方式和參數變化之間的區別。因此,“運動軌跡實驗”任務內容實施過程中,按照“課前預習—課中練習—課后復習”的基本活動,采用混合式教學能夠有效將知識點和技能點化解,從而提升學生技能水平。
3.3.1? 課前預習
教師在網絡教學平臺上傳課件、視頻、動畫、電子工單等教學資源,如圖2所示,包括每個運動指令的講解微視頻和課件,學生通過平臺及APP進行課前預習,查閱相關資料,對各個運動指令有一個初步的認識,理解指令中每個參數代表的含義,教師在電子工單中明確工作任務,學生開展線上互動學習與討論,打破線下教學壁壘,形成跨時間、跨空間的學習氛圍,激發學生興趣,培養學生創新思維與自主學習能力。
3.3.2? 課中練習
教學過程中,“學生練為主,教師教為輔”,以任務工單為引領,具體工作任務為載體,通過團隊合作的形式,在仿真實訓平臺完成既定的工作任務,如圖3所示,學生通過操作示教器進行軌跡編程和點位示教,實現工業機器人按照預定的軌跡運行,仿真實訓平臺模擬工業機器人端,兼容了真實的手持示教器,在確保初學者操作安全的情況下,提升學生使用示教器的熟練度,在得到教師允許后再以團隊的形式在實操平臺進行操作,不斷鞏固實操技能。利用網絡教學平臺,開展小組練習、頭腦風暴等教學活動,加強師生互動、生生互動,培養學生的團隊精神。學生將課前預習遇到的疑問帶入課堂釋疑,教師對學生實踐操作進行指導,加深學生對運動指令和軌跡規劃的理解,針對學生容易出錯、遺漏、不理解的地方著重分析講解,進一步提升學生的實操技能,培養學生的鉆研精神以及發現問題、解決問題的能力。
3.3.3? 課后復習
教師將課后任務發布在網絡教學平臺,如圖4所示,學生通過課間知識點的吸收歸納,利用仿真軟件和仿真實訓平臺,通過不斷練習,不斷鞏固當前知識,完成離線編程任務,對工業機器人的操作加以熟練鞏固,不斷提升操作技能,提高動手能力。教師在網絡平臺查看學生的完成情況并點評分析,總結學生存在的典型問題主要是轉彎半徑的設置不合理,導致實際運動路徑與預期路徑存在偏差,因此在下一次的課堂上,將這個知識點單獨重點講解,并通過實例對比轉彎半徑設置不同導致運動軌跡不同的區別,加深學生對轉彎半徑的理解。
3.4? 學生綜合能力評價
以多方位評價模式、多維度評價內容、多環節評價手段,借助網絡教學平臺,綜合評價學習效果,促進學生職業技能的培養。學生綜合能力評價體系如表1所示,其中平時表現和綜合測評各占50%,平時表現分為線上評價和線下評價,線上主要考查學生的資料搜集整理能力和學習態度,線下主要考查學生的團隊合作、職業素養和操作能力;綜合測評分為階段考核和期末考核,階段考核主要考查學生對單個知識點的掌握和應用,期末考核主要考查學生對所學知識點的綜合運用能力。
3.5? 教學效果分析
“工業機器人編程與操作”混合式教學改革探索運用在我校2019級數控專業的教學中,與上一屆同專業同課程進行對比發現,教學模式的改變,使學生的學習興趣較往屆有很大的提高,從“要我學”逐漸變成“我要學”。經過一學期的教學,學生對工業機器人相關知識和技能掌握更好,不再是局限于課本上的理論知識或虛擬仿真軟件上的“鼠標”操作,而是具備了更強的實踐操作技能,更有利于培養符合企業用人需求的技能型人才。
4? 結? 論
混合式教學,將傳統的“教師知識傳授”轉變至“學生能力培養”上,從實踐-理論-實踐的教學重構,以小組合作為手段,創建高真實度的虛擬環境,結合電子任務工單,充分調動學生積極性,增強師生互動,不斷促進學生綜合能力的養成,有效提升課堂教學質量。
參考文獻:
[1] 官文,熊杰,盧峰.中國制造2025背景下工業機器人技術人才培養初探 [J].課程教育研究,2020(11):238.
[2] 沈玲,劉甘霖.SPOC環境下混合教學模式研究——以“工業機器人編程與操作”課程為例 [J].湖北工業職業技術學院學報,2020,33(5):82-84.
[3] 趙達.基于混合學習的工業機器人技術專業教學設計與開發 [D].天津:天津大學,2017.
[4] 劉大龍,丁鐸.項目式教學在《工業機器人操作與編程》課程中的實踐研究 [J].電腦知識與技術,2021,17(5):144-145+169.
[5] 潘贇.任務引領型教學法在工業機器人編程與操作教學中的應用 [J].現代職業教育,2021(26):118-119.
[6] 盧峰,曾小山.“1+X”證書下的《工業機器人編程與操作》課程建設研究——以江西環境工程職業學院為例 [J].課程教育研究,2020(41):89-90.
猜你喜歡
校園英語·上旬(2016年10期)2016-11-16 18:07:59
電腦知識與技術(2016年25期)2016-11-16 14:06:34
科教導刊(2016年25期)2016-11-15 18:36:50
考試周刊(2016年85期)2016-11-11 00:35:30
知音勵志·社科版(2016年9期)2016-11-09 05:41:07
現代經濟信息(2016年19期)2016-10-20 19:38:06
現代經濟信息(2016年19期)2016-10-20 19:32:18
商業會計(2016年13期)2016-10-20 16:18:54
中國市場(2016年35期)2016-10-19 03:02:20
科技視界(2016年22期)2016-10-18 16:12:24