無人機通信專網在頻譜共享下的接入與干擾管理
2021-04-04 10:48:19李培銘周睿
現代信息科技 2021年18期
李培銘 周睿


摘? 要:文章研究了無人機在公網頻譜共享下的接入與干擾管理,通過聯合設計無人機軌跡與數據傳輸調度以最大限度降低無人機的任務信息傳輸時間,設計中充分考慮了無人機實際飛行約束以及地面基站的計算能力約束。然而,聯合無人機軌跡和信息傳輸所建模的問題是非凸的,通常難以求出最優解。為此,提出了一種高效的求解算法以獲得高質量的解決方案。最后,通過數值仿真得出,相較于基準方案,所提方案的無人機任務完成時間大大降低。
關鍵詞:無人機專網通信;頻譜共享;資源配置;軌跡設計;干擾管理
中圖分類號:TN929.5 文獻標識碼:A 文章編號:2096-4706(2021)18-0064-04
Abstract: This paper studies the access and interference management of UAV non-public network under spectrum-sharing. We jointly design the UAV trajectory and data transmission scheduling to minimize the UAV's mission transmission time, considering the UAV's flight constraints and the computation power constraints of ground base station. However, the formulated problem is non-convex and difficult to be solved optimally. As such, we propose an efficient algorithm to obtain high-quality solutions. Finally, numerical results show that the proposed design significantly reduces the mission transmission time as compared to benchmark schemes.
Keywords: UAV non-public network communication; spectrum sharing; resource allocation; trajectory design; interference management
0? 引? 言
隨著通信技術的不斷進步和制造成本的不斷降低,無人機已經發展出越來越多的應用,例如貨物運輸、航空拍攝、救援搜索、通訊覆蓋等業務[1-3]。目前無人機大都采用未授權頻段進行通信,由未授權頻段通信難以保障穩定性與可靠性。因此,無人機專網通信越來越成為工業界關注的發展趨勢。5G-ACIA在發布的5G專網白皮書中闡述了專網的部署方式,其中與公網共享通信頻譜是作為一種具有較大可行性的部署方式[4]。在頻譜共享條件下,聯網無人機與地面用戶在上下行通信中會面臨一定的通信干擾問題。對此,如何在保障地面用戶通信質量的基礎上提升聯網無人機的通信性能是一個較為挑戰的問題。文獻[5]總結了應對聯網無人機空地干擾的各種消除方法,其中文獻[6]提出了一種基于無人機與基站協作調度的小區間干擾協調方法,文獻[7]研究了一種本地干擾消除方法,其中地面基站可以先對無人機信號進行解碼并消除產生的干擾以促進地面用戶信息的解碼。此外,文獻[8-10]研究了一種協作干擾消除的方法,其中地面基站可將解碼的無人機消息發送到附近的基站進而實現協作干擾消除,其需要通過回傳鏈路實現數據共享。但這些先前的工作僅考慮了無人機停留在固定位置來設計對應的無線資源分配方案,忽略了無人機可控移動性的設計自由度。
利用無人機的可控機動性,軌跡設計給無人機通信性能提升帶來了新的設計自由度。但是,無人機所具有的計算處理能力通常是受限的,如何對無人機端的計算任務進行有效處理也是一個開放性問題。相比于具有復雜衰落信道的地面用戶,無人機在空中通常具有更強大且更可靠的視距(Line-of-sight, LoS)通信鏈路,且可以實現同時與多個地面基站相連。因此,無人機可同時連接多個地面基站以利用分布式的計算資源來完成其計算任務的處理。其次,傳統移動邊緣計算場景中移動邊緣計算僅在固定的地面用戶或是其連接的地面基站之間分配通信和計算資源[11],考慮到無人機擁有三維可控的靈活移動性,可以通過聯合設計其飛行軌跡以及與相關聯的地面基站的調度等無線資源,更大程度地提升系統性能。基于此,本文研究通過無人機頻譜共享專網通信將其計算任務傳輸至地面基站端進行處理的應用場景,由地面基站進行遠程計算處理可以為無人機提供無縫通信和強大的算力支持,該應用是十分具有發展前景的。
1? 系統模型
考慮無人機從初始位置飛行到終點位置,期間需要完成特定的計算任務,無人機在與公網頻譜共享下利用專網通信將計算任務傳輸至地面基站進行執行。具體考慮服務于地面用戶的多個地面基站以及一個聯網無人機,其中和分別表示地面用戶與地面基站的集合。假設無人機需要從固定的初始位置飛行到最終位置執行既定任務,在此期間需要通過將L個比特的計算任務卸載至地面基站進行遠程處理。無人機采用正交頻分復用協議將分割后的計算任務卸載至不同的地面基站,可用的正交資源塊(Resource block,RB)由集合表示。將任務完成時間T離散化為等長的N個時隙,用集合 表示。
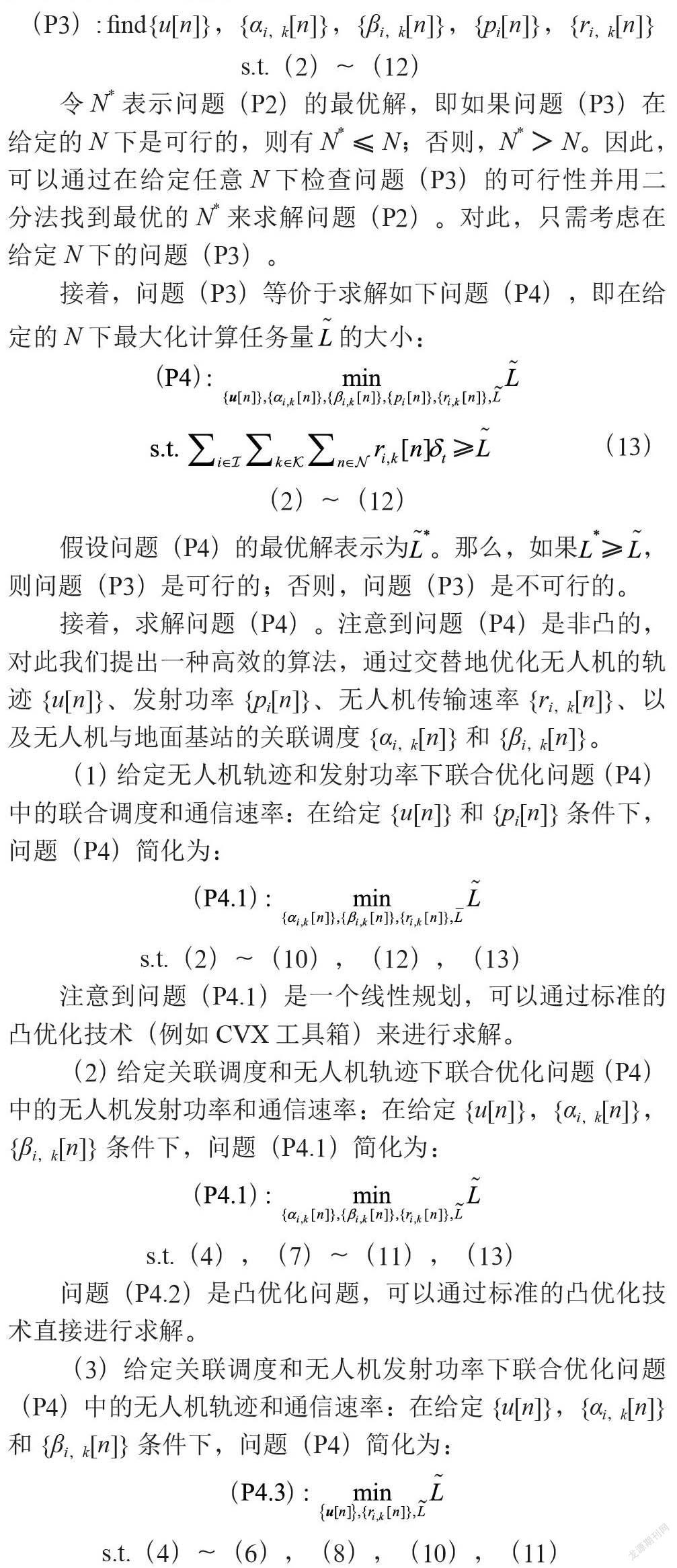
問題(P4.3)是非凸優化問題,我們采用基于連續凸近似(SCA)算法來得到有效的解決方案。由于凸函數的一階泰勒展開是函數值的全局下界,可以將非凸約束近似為線性約束進行替換,轉為凸優化問題進行求解。在每次迭代中,需要在給定的局部點下求解近似后的問題,再將其最優解作為下一次迭代的局部點。基于連續凸近似的更新最終可以收斂到問題(P4.3)的局部最優解。
通過利用求解問題(P4.1)、(P4.2)和(P4.3)來交替地更新無人機的軌跡{u[n]}、發射功率{pi[n]}、無人機傳輸速率{ri,k[n]}、以及無人機與地面基站的關聯調度{αi,k[n]}和{βi,k[n]}。對于每次迭代,問題(P4)的最優值是單調非遞減的且問題(P4)的最優值是有上限的,所提出的算法最終將收斂到至少一個(P4)的局部最優解。
最后,通過求解問題(P4),相應地檢查可行性問題(P3)。通過將其與N上的二分法搜索相結合,可有效求解問題(P2)。所獲得的問題(P2)的解通常是次優的,因此這對于問題(P1)也是次優的。
4? 仿真結果
在本節,將通過仿真實驗,驗證所提出的聯合優化算法在頻譜共享場景下無人機計算任務卸載系統的性能。考慮兩種基準方案,一是直飛,即無人機初始軌跡設定為以固定速度 從初始位置直線飛行到最終位置;另一種是連續懸停飛行,即無人機以最大速度Vmax連續飛到K個地面基站的頂部,并在每個地面基站上方懸停以進行高效的傳輸。其中,地面基站的訪問順序通過以最小化飛行距離的旅行商問題(Traveling Salesman Problem)來確定。
在仿真實驗中,考慮K=4個地面基站分布于1×1 km2的區域內,考慮I=4個資源塊且每個資源塊地傳輸帶寬為1 MHz,參考信道功率增益設為β0=-30 dB,噪聲功率設為σ2=-60 dBm,路徑損耗指數為α=2,無人機飛行高度為H=50 m,無人機最大飛行速度為Vmax=50 m/s,無人機最大發射功率為P=20 dBm,地面基站占用情況為ρi,k[n]=1,,地面用戶mi,k[n],接收到的功率假設恒為qi,k[n]|gi,k[n]|=-70 dBm,地面用戶的最大干擾閾值為Γmax=-50 dBm。
假設每個地面基站的每個時隙最大處理能力都為fk= 2.5 Gbits,k∈K。圖1展示了在不同傳輸數據量L下的無人機飛行軌跡。當L=100 Mbits時,無人機以最大速度從初始位置飛行到終點位置。當L=300 Mbits時,可以觀察到無人機的跡偏離初始軌跡,并向地面基站1、2、3靠近,目的是為了獲得更多地面基站的算力。當L進一步增加到800 Mbits時,無人機到達并懸停在所有地面基站的上方,并在地面基站1和2之間往返飛行。圖2展示了任務完成時間T與傳輸數據量L的關系。可以觀察到,隨著傳輸數據量變大,三種方案的任務完成時間都相應地增加,且所提方案的性能要優于兩個基準方案。此外,當傳輸數據量較小時(如L≤200 Mbits),直飛方案與所提方案所需任務完成時間是相同地,且都優于連續懸停飛行方案所需的任務完成時間。當L=300 Mbits時,連續懸停飛行方案與直飛方案之間的性能差距相應增大。當傳輸數據量進一步增加時,所提方案對比兩個基準方案所實現的性能增益進一步增加。
5? 結? 論
本文針對頻譜共享場景下無人機通信專網應用場景進行研究,考慮無人機最大速度和初始/終點位置約束以及地面基站計算能力約束,通過聯合設計無人機軌跡與數據傳輸以最大限度減少無人機的計算任務完成時間。通過利用交替優化和連續凸近似技術,提出了一種高效的求解算法可獲得問題模型的次優解。在仿真實驗中,將連續懸停飛行和直飛作為基準方案,結果驗證了所提方案可以顯著降低無人機的任務完成時間。
參考文獻:
[1] ZHENG Y,RUI Z,LIM T J. Wireless communications with unmanned aerial vehicles:opportunities and challenges [J].IEEE Communications Magazine,2016,54(5):36-42.
[2] 矯陽.災區通信中斷怎么辦 翼龍無人機移動公網基站來幫忙 [N].科技日報,2021-07-23(2).
[3] 鐘劍峰,王紅軍.基于5G和無人機智能組網的應急通信技術 [J].電訊技術,2020,60(11):1290-1296.
[4] 5G-ACIA. 5G non-public networks for industrial scenarios (white paper) [EB/OL].(2020-05-25).https://5g-acia.org/wp-content/uploads/5G-ACIA_5G_Non-Public_Networks_for_Industrial_Scenarios_09-2021.pdf.
[5] MEI W D,ZHANG R. Aerial-Ground Interference Mitigation for Cellular-Connected UAV [J].IEEE Wireless Communications,2021,28(1):167-173.
[6] MEI W D,WU Q Q,ZHANG R. Cellular-Connected UAV:Uplink Association,Power Control and Interference Coordination [C]//2018 IEEE Global Communications Conference (GLOBECOM).Abu Dhabi:IEEE,2018:206-212.
[7] PANG X W,GUI G,ZHAO N,et al. Uplink Precoding Optimization for NOMA Cellular-Connected UAV Networks [J].IEEE Transactions on Communications,2020,68(2):1271-1283.
[8] LIU L,ZHANG S W,ZHANG R. Multi-Beam UAV Communication in Cellular Uplink:Cooperative Interference Cancellation and Sum-Rate Maximization [J].IEEE Transactions on Wireless Communications,2019,18(10):4679-4691.
[9] MEI W D,ZHANG R. Uplink Cooperative NOMA for Cellular-Connected UAV [J].IEEE Journal of Selected Topics in Signal Processing,2019,13(3):644-656.
[10] MEI W D,ZHANG R. Uplink Cooperative Interference Cancellation for Cellular-Connected UAV:A Quantize-and-Forward Approach [J].IEEE Wireless Communications Letters,2020,9(9):1567-1571.
[11] CHEN M,DONG M,LIANG B. Resource sharing of a computing access point for multi-user mobile cloud offloadingwith delay constraints [J].IEEE Transactions on Mobile Computing,2018,17(12):2868-2881.
作者簡介:李培銘(1994—),男,漢族,廣東汕頭人,博士在讀,研究方向:無線通信,無人機通信,凸優化理論在無線通信中的應用;周睿(1990—),男,漢族,河北滄州人,網絡工程師,博士在讀,研究方向:網絡設計,建模優化算法。