邊緣強度映射與區域劃分的SAR圖像非局部平均濾波算法
2021-04-06 11:03:08馮子金
西安工程大學學報 2021年1期
關鍵詞:區域
馮子金,朱 磊,高 飛
(西安工程大學 電子信息學院,陜西 西安 710048)
0 引 言
由于SAR成像機制的局限性,使得SAR圖像中隨機散布著大量的乘性噪聲,這些噪聲的存在既影響SAR圖像的視覺效果,又嚴重干擾著后續自動解譯處理的有效性和可靠性[1-2],因此,抑制相干斑噪聲研究一直是SAR圖像處理領域的研究熱點之一。
SAR圖像抑斑算法主要分為空域濾波[3-5]、變換域濾波[6-9]和偏微分擴散濾波[10-12]3類。經典的空域濾波算法有Lee[3]濾波、Kuan濾波[4]、Frost濾波[5]等,其特點是直接在空域利用滑動窗來估計圖像的真實像素值,而不考慮滑動窗周邊的圖像信息。因此,空域濾波算法具有算法相對簡單、實時性好等優點,但圖像濾波效果受滑動窗參數設置影響較大。由于小波等多尺度變換在抑制加性噪聲時的良好表現,許多基于變換域的抑斑算法先后被提出,經典的變換域算法有基于小波變換的抑斑算法[7]以及基于Contourlet變化的抑斑算法[13]等。該類算法能夠很好兼顧同質區的相干斑抑制和邊緣的紋理信息保護,但算法的復雜度高且計算量大,容易形成偽吉布斯現象。偏微分擴散濾波借助局部統計量約束各像素擴散濾波的方向和強度,能夠在抑制噪聲的同時兼顧邊緣保護,但容易導致同質區的塊效應現象及邊緣附近相干斑殘留等問題,其代表性算法有SRAD[14]及其改進算法。2005年Buades等針對圖像加性噪聲的抑制問題[15],提出了NLM算法,為抑制噪聲提供了新的思路。隨后NLM算法被引入SAR圖像抑斑應用領域,其中有代表性的算法包括SAR-BM3D[16]、NL-CV[17]、MR-NLM[18]及其改進算法[19-20]等,這些算法比傳統局部平均算法展現出更好的抑斑性能。
為了進一步提升NLM類抑斑算法在相干斑抑制與邊緣保護方面的性能,本文算法進行了3處改進。第一,利用閾值化CV將SAR圖像分成同質區與紋理區,并對不同區域像素分別采用不同尺度相似窗來估計相似性測量參量;第二,利用對乘性噪聲具有恒虛警特性的ESM構建相似性測量函數,從而區分同質區與紋理區像素之間的相似性差異;第三,利用CV構建NLM濾波的自適應衰減因子,使得NLM濾波可自適應調節對同質區與紋理區像素整體濾波強度的大小。
1 ESM和區域劃分的NLM濾波模型
已知SAR圖像中的相干斑噪聲為乘性噪聲,假設像素i處的噪聲為R(i),實際場景為U(i),觀測值為X(i),則圖像模型為X(i)=U(i)R(i)。實驗表明,對SAR圖像進行非局部平均抑斑處理時,采用大尺度相似窗對像素進行濾波值估計時,同質區抑斑效果偏平滑,噪聲能得到較好的抑制;采用小尺度相似窗對像素進行濾波估計時,紋理區的濾波效果較好,能最大限度地保護SAR圖像的邊緣紋理信息。因此,本文提出了一種基于ESM和區域劃分的SAR圖像NLM濾波(ESM-NLM)模型。其模型表達式為
(1)

2 區域劃分因子β估計
為實現對SAR圖像同質區和紋理區進行不同濾波程度的非局部加權平均,本文提出采用區域劃分因子將圖像劃分為同質區和紋理區,對同質區進行濾波程度偏平滑的NLM,對紋理區進行濾波程度偏邊緣保護的NLM。構建區域劃分因子主要分為2個步驟:采用CV圖估計可構建區域劃分因子的閾值;根據閾值估計區域劃分因子。
2.1 估計區域劃分閾值
估計輸入SAR圖像的CV,得到CV圖像的直方圖統計特性,從統計特性可以看出,CV在同質區的值較小,在紋理區的值較大,說明CV可較好地表征圖像的起伏信息。因此,采用CV直方圖來估計構建區域劃分因子的閾值。CV(記作Vc)表達式為
(2)

大量實驗表明,在大于直方圖最大值的區域上圖像紋理信息較多,在小于直方圖最大值的區域上圖像平滑信息較多,所以將直方圖最大值對應橫坐標的灰度值M作為閾值T。
2.2 估計區域劃分因子

3 改進NLM濾波值Y1和Y2估計

3.1 計算局部ESM均值矩陣
通過滑動窗ESM的均值比估計每個像素間的相似性進行濾波。由于對圖像的紋理進行檢測時使用的是差分或梯度,而差分和梯度難以消除乘性噪聲產生的虛假紋理信息,所以用帶有方向信息的平行窗通過比率運算估計ESM,對乘性噪聲實現具有較強魯棒性的恒虛警邊緣檢測。
假設當前像素為i,估計像素i在θ(θ∈[0,π))方向上的局部均值比的最小值,從而獲得像素i的ESM值SEM(i),其表達式為
(3)
式中:m1(i|θ)和m2(i|θ)為在θ方向上中心像素兩側的局部均值。
當由區域劃分因子確定圖像紋理區和同質區后,本文采用小尺度相似窗的ESM均值比來估計紋理區的相似性,采用大尺度相似窗的ESM均值比來估計同質區的相似性,因此ESM的均值矩陣E(ψ(i))表達式為
(4)

3.2 估計融合CV的非局部加權平均
通過搜索窗中每個像素在相似窗下的ESM矩陣與中心像素的ESM矩陣,利用二者各對應元素比值的2范數來構建相似性測量參量,則有

(5)
式中:‖‖2為2范數;E(ψ(i))與E(ψ(j))分別為在相似窗ψ(i)與ψ(j)處顯示的ESM均值矩陣信息。
3.3 ESM的非局部加權平均濾波
在進行非局部加權平均濾波時,衰減因子是調節濾波強度的主要參量,衰減因子較小,會導致濾波過平滑,紋理信息被濾掉,邊緣保護性能差;衰減因子較大,會導致SAR圖像濾波后殘留的噪聲較多,但邊緣細節信息保留相對完整,因此需要對同質區設置較小的衰減因子,對紋理區設置較大的衰減因子。由于CV能夠較好地表征圖像起伏情況,所以采用CV構建自適應衰減因子,但由于在估計CV圖像時,采用同一尺度窗估計圖像的局部均值與方差導致效果不理想,因此采用上文構建的區域劃分因子將圖像劃分為同質區和紋理區,對同質區和紋理區采用不同尺度的窗估計均值與方差。適應衰減因子的表達式為
(6)
由式(5)估計像素i與其他像素的相似性,再由式(6)控制濾波強度,從而搜索窗內其他像素j對中心像素i的加權系數為ω(i,j),其表達式為
(7)
根據區域劃分因子對同質區采用大尺度相似窗濾波,對紋理區采用小尺度的相似窗濾波,則本文算法的表達式為

4 實驗驗證
為了檢測所提出算法的性能,在真實的SAR圖像的抑斑性能、抑斑的視覺效果以及抑斑圖像的Canny邊緣檢測圖像方面,將本文(ESM-NLM)算法和文獻[18]中以均值比與CV聯合構建的NLM(MR-NLM)算法進行比較,參數指標采用文獻[21]用到的等效視數VENL和邊緣保持指數VEPI。VENL表示相干斑的平滑能力,其值越大表明相干斑抑制程度越高,VEPI表明圖像邊緣的保護能力,其值越大表明抑斑后圖像的邊緣保護程度越高,理想值為1。圖1為2種算法對真實SAR圖像的抑斑圖像對應的邊緣檢測圖像。圖1(a)的抑斑參數:MR-NLM搜索窗尺度為21×21,相似窗尺度為7×7,衰減常數α為1.5;EMS-NLM搜索窗尺度為21×21,相似窗尺度為11×11和9×9,α為1.36;Canny算子的邊緣檢測閾值為0.08。

(a) 農田真實SAR圖像 (b) MR-NLM抑斑圖 (c) ESM-NLM抑斑圖圖 1 2種算法對真實SAR圖像的抑斑圖像對比Fig.1 Comparison of speckle suppression images of the two algorithms on real SAR image
如圖1(b)和1(c)所示,ESM-NLM算法在同質區相干斑抑制較為徹底,邊緣保護較好。與MR-NLM算法相比,ESM-NLM算法消除了部分同質區平滑度不夠的問題。如圖2(a)和2(b)所示,MR-NLM算法會隨著搜索窗尺度的增大而使得邊緣保持特性下降,ESM-NLM算法在邊緣保持上效果更好。其原因在于MR-NLM算法對紋理區和同質區使用同一濾波值對整個圖像進行濾波時,會導致紋理區的濾波不足而同質區過保持,或紋理區的過濾波而同質區欠保持的情況,對整幅圖像不同區域的偏濾波和偏保持的側重不足。而ESM-NLM算法是先將圖像劃分為同質區和紋理區,對不同區域使用不同的濾波值使得在同質區保持效果較好,紋理區去噪效果較好。2種算法對圖1(a)中A區和B區的抑斑對比效果以及圖1(a)的邊緣保持對比效果如表1所示。
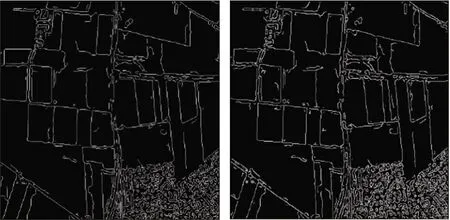
(a) MR-NLM對應邊緣 (b) EMS-NLM對應邊緣 檢測圖 檢測圖圖 2 2種算法抑斑圖像對應的邊緣檢測圖像Fig.2 The edge detection image corresponding to the speckle suppression image of the two algorithms
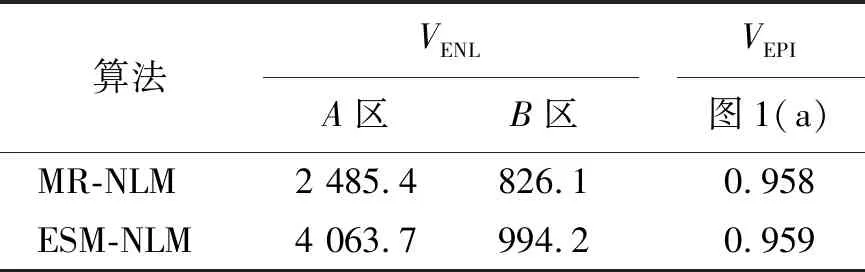
表 1 2種算法抑斑參數對比
從表1可以看出,2種算法在對圖1(a)A區和B區的抑斑效果進行對比時,ESM-NLM算法的VENL和VEPI值高于MR-NLM算法。2種算法在對圖1(a)的抑斑效果進行對比時,采用區域劃分的ESM-NLM算法更適合對SAR圖像濾波,由單個區域推廣到整幅圖像,可以在整個區域中得到更好地濾波效果。
5 結 語
本文給出的算法的主要思想是先構建區域劃分因子,將圖像劃分為同質區和紋理區,以ESM均值比作為相似性測量參量構建SAR圖像非局部平均,再對同質區采用大尺度相似窗進行非局部平均,對紋理區采用小尺度窗進行非局部平均,最后將不同區域的濾波結果通過區域劃分因子合并得到最終的抑斑結果。在后續工作中,由于ESM-NLM算法將圖像劃分為同質區和紋理區后分別進行濾波,會導致時間復雜度有所上升,如何在保持濾波效果的同時降低時間復雜度將是下一步工作的重點。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
