城市快速路入口控制策略研究
2021-04-06 04:51:16左小莉王景升
山東交通科技 2021年1期
左小莉,王景升
(中國人民公安大學,北京 100038)
引言
針對駛入快速路入口匝道的車輛需減速、停車或排隊后才能匯入主流的典型問題,匝道控制是緩解快速路交通擁堵的有效方法之一,在國內外學者中頗受青睞。城市快速路入口匝道控制于20 世紀60 年代第一次被應用于芝加哥,之后多國實驗性地應用了入口匝道控制策略。PAPAGEORGIO[1]提出了設置匝道控制要考慮的交通和社會的可行性以及實行中的收益問題。KERNER 和李新剛[2-3]根據1995—2001 年高速公路上的擁堵交通數據分析,發現在孤立的瓶頸處有兩種模式:同步和堵塞共存的模式(General Pattern,GP)和同步模式(Synchronized Pattern,SP)。LEE 等[4]通過對韓國某路段匝道處的調查分析,發現了交通擁堵的三種模式:振蕩且延伸,均勻且延伸,均勻但不延伸。
目前上海、北京都已對快速路匝道管理系統進行了實際應用,并且取得了比較好的效果。陳學文和田傲霜[5]用人工神經網絡的方法,控制并仿真了城市快速路入口匝道的調節率,發現在城市快速路入口匝道控制中,神經網絡的控制效果很好。高萬寶等[6]考慮快速路和入口匝道上的實時密度設計了匝道控制優化算法,該算法的目的在于在控制快速路密度接近其最優值的同時減少匝道上的排隊數,證明了實時密度控制算法的有效性。慈玉生等[7]表明可利用神經模糊原理,對快速路入口匝道駛入進行控制能夠有效提高匝道立案階段的利用效率,同時可減少交通事故。王世明和徐建閩[8]利用模糊控制算法和支持向量機算法,提出了一種新的標定方法,對于實時交通狀況能夠給出不同的控制策略,且呈現出良好的控制效果。姜紫峰和韓錫令[9]提出了單點匝道控制和聯合匝道控制,說明了兩種方法都能減少主線車流的總行程時間,同時證實了聯合匝道控制方法比單點匝道控制方法更為有效。賀敬凱和徐建閩[10]運用BP 神經網絡對入口匝道控制核心系統進行設計,使其能更好地對實時交通流狀態做出反應。
1 快速路系統控制理論與實現技術
1.1 快速路系統交通特性
城市快速路能夠提供非間斷交通流的道路,具有出入控制特性。從駕駛人角度來看,快速路是連續的設施。然而,當一段或多段快速路路段發生擁堵時,需要將快速路看作一個整體進行系統的分析,同時考慮系統中所有相關的運行路段,需要考慮從“瓶頸”處排隊的蔓延和消散,并考慮對相鄰路段的影響。
1.2 城市快速路入口匝道定時控制
定時限流控制是最簡單的控制形式,具有與城市交叉口信號相同的精確性。定時限流控制包括定周期定長和定周期不定長,兩者都是定時信號控制的一種實現形式。
1.2.1 定周期定長
指固定配時的同周期同綠燈時間,通過對入口設置同周期同等綠燈時長進行控制,依據歷史交通數據進行計算和調整。開環控制的實現依賴于線性規劃的方式,簡單方便,但沒有反饋,故無法根據快速路主路的交通運行狀態進行實時變化。
1.2.2 定周期不定長
指固定配時的同周期不同綠燈時間,通過對入口設置同周期但綠燈時間不同進行控制,依據歷史交通數據進行計算和調整,采用線性規劃的方式來計算入口匝道處的信號燈配時參數,同樣也是開環控制,但考慮了不同入口匝道的排隊長度不同從而設置不同的紅燈時間,避免出現排隊長度超過匝道長度從而引起整個快速路系統出現堵塞,但因其也是開環控制沒有控制效益反饋,故無法根據快速路主路的交通運行狀態進行實時變化。
1.3 城市快速路入口匝道自適應控制算法
1.3.1 入口匝道自適應控制算法
在入口匝道感應控制中ALINEA 控制算法應用最為廣泛[11]。該算法的輸入變量為下游主路占有率(或密度)和匝道排隊長度,控制目標為主路的交通量最大化、匝道排隊長度最小,以此為依據對匝道的進入流量進行調節控制,從而建立起一個閉環控制模型,實現對入口匝道交通狀態的動態控制[12]。
匝道調節率方程[13]:

式中:r(k)—第k周期的匝道調節率;r(k-1)—第(k-1)周期的匝道調節率;Kr—待標定參數;— 主線下游期望占有率;Oout(k-1)—周期(k-1)內主線下游的實際占有率。
匝道調節率取值范圍:

匝道排隊控制方程:

式中:d(k-1)—匝道(k-1)周期內的到達流率;Lmax—匝道最大排隊長度,m;l(k)—第k周期匝道實際排隊長度,m;T—周期時長,s。
1.3.2 入口匝道自適應控制實現技術
可視化VAP 的控制原理是在每個仿真秒內,按照設置的控制頻率VAP_FREQUENCY 調用編寫的VAP 控制程序,控制頻率VAP_FREQUENCY 是仿真秒的整數倍,如果設置仿真精度為10,即0.1 步長/仿真秒,則控制頻率VAP_FREQUENCY 取2。
選擇一個主控周期,每個周期對各檢測點的占有率、流量、速度數據統計一次,在信號周期結束時調用VAP 程序,以上一個周期的統計數據作為依據計算出下一個周期的控制參數,當閾值低于下游檢測器占有率時,則開啟入口匝道控制程序,按照條件設定的循環執行程序,直至仿真結束,主要應用的算法見公式(4)。

2 快速路系統交通流特性分析
交通流參數特性主要包括時變特性和交通流參數之間的相互關系特性。選擇研究對象為月壇北橋-阜成門橋北路段作為快速路交通流分析對象。
2.1 流量-密度關系
2015 年10 月12 日(星期一)阜成門橋-阜成門橋北467 m 路段和月壇北橋至阜城門橋處檢測器的時間占有率隨流量的變化曲線見圖1。
當道路上的車輛增多時,其密度增大,車輛間距就會變小,車輛間的相互影響使得駕駛人降低車速,因此速度隨著密度的增加而減小。這一現象主要是由于出入口匝道車輛的駛入和駛離造成了主線上交通流呈現出了波動性傳播的特性,對這一特性的深入分析將有利于進行匝道優化控制。
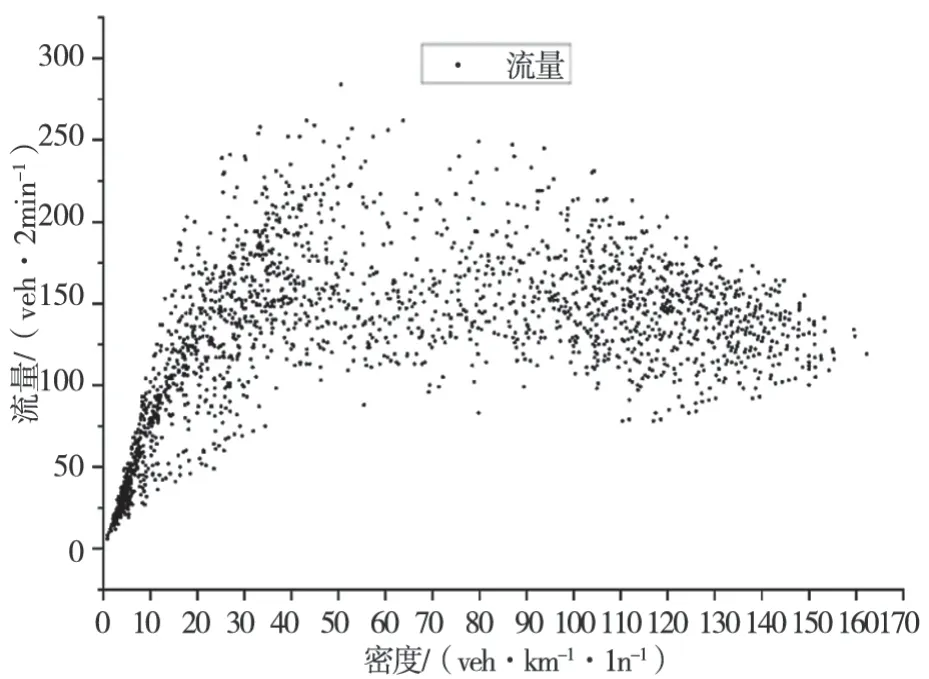
圖 1 阜城門橋北檢測器的流量-密度關系
2.2 速度-占有率關系
目前關于突發事件或匝道控制的研究中通過比對占有率和速度的變化特征的算法廣為流行,阜城門橋至阜城門橋北467 m 處HI7064c 檢測器速度-時間占有率關系見圖2。

圖 2 阜城門橋北檢測器的速度-占有率關系
可以看出,當時間占有率達到0.4 左右時,車輛速度會有明顯下降,從0.3 時的30 km/h 快速下降到15 km/h,通過對比分析可以為下一步快速路入口匝道控制提供控制參數依據。
3 快速路系統入口控制實例仿真及分析
3.1 仿真模型標定

表 1 仿真模型車輛行程時間檢測器設置
城市快速路入口處的交通系統主要包括入口段和相連主路段,在主路和入口斷面安裝車輛行程時間檢測器可獲取車輛的行程時間,進而對其交通狀態進行評價。行程時間檢測器設置見表1。
3.2 占有率和速度均值對比
不同控制方式占有率均值對比見表2。

表2 同控制方式占有率均值對比(仿真時間3 600 s)
通過表2 比較,對快速路入口匝道交通系統采用無控制、定時同周期同時長信號控制、定時同周期不同時長信號控制和自適應控制的占有率均值結果分析可得,采用自適應控制后,延誤有明顯的下降,自適應控制方式對于匝道匯入主路上游外側道路的數據采集點所獲的車輛平均速度為47.29 km/h,相對于無信號控制的數據采集點平均速度32.84 km/h,提升了44.00%,同樣占有率下降11.11%,說明對入口匝道進行自適應控制后,由入口匝道到達主路上游的車輛無序狀態得以改善,提升了主路車輛的運行速度。
3.3 平均延誤和停車次數均值對比
平均延誤和停車次數均值對比見表3。
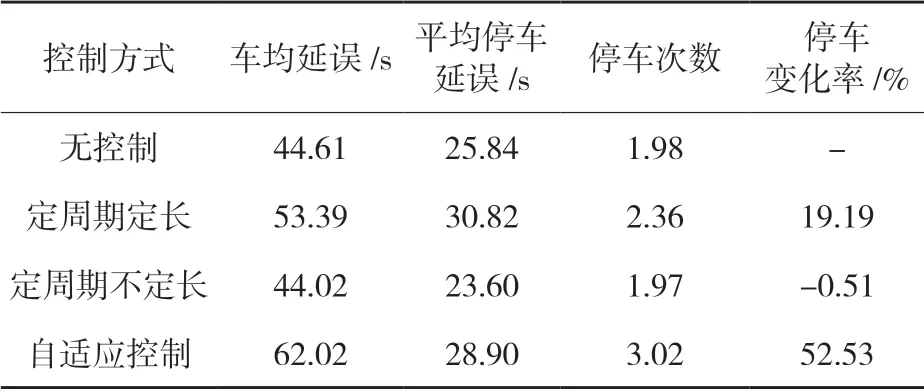
表3 不同控制方式平均延誤與停車次數均值(仿真時間3 600 s)
通過表3 可知,通過定周期定時控制之后,主路車輛的延誤增加了19.27%,通過定周期不定長控制之后延誤降低了8.67%,自適應控制之后增加了11.84%,自適應控制的平均停車延誤增加,主要是交通系統整體的停車次數增加,當阜成門橋北467 m處的檢測器的占有率超過0.4 后,開始自適應控制,信號周期短,導致平均停車延誤增加。
3.4 行程時間與車輛數均值對比
不同控制方式車輛數均值及行程時間均值對比見表4、表5。

表4 不同控制方式車輛數均值(仿真時間3 600 s)

表5 不同控制方式行程時間均值對比(仿真時間3 600s)
通過表4、表5 可以看出,對快速路入口匝道交通系統采用定時同周期同時長信號控制、定時同周期不同時長信號控制和自適應控制后,城市快速路主路流量分別可增加2.38%、3.23%、5.37%,行程時間分別可降低11.94%、11.37%、16.78%,自適應控制的控制優勢突出。
4 結語
基于國內外關于匝道控制方法的研究現狀,結合我國城市快速路的特點、交通流特性以及關于匝道控制的研究現狀和應用現狀,研究了符合北京市二環快速路實際情況的匝道控制方法。(1)通過分析北京市西二環月壇北橋、阜成門橋北467 m 處檢測器2015 年的數據,得出當時間占有率達到0.4 左右時,車輛速度會有明顯下降,從占有率為0.3 的30 km/h 左右快速下降到15 km/h,為快速路入口匝道控制提供控制參數依據。(2)利用Vissim 交通仿真軟件的VisVAP 程序語言對入口匝道自適應控制效果進行了仿真,并得出了相比入口無控制、定時控制方式,自適應控制能夠更好地調節入口匝道車流,提升快速路主路車速和交通量。
