基于Romax的功率分流齒輪箱齒輪修形仿真分析
2021-04-06 00:03:24周杜鄭傳統
機械 2021年2期
關鍵詞:變形
周杜,鄭傳統
基于Romax的功率分流齒輪箱齒輪修形仿真分析
周杜,鄭傳統
(明陽智慧能源集團股份公司 風能研究院,廣東 中山 528437)
齒輪箱的可靠性和壽命對風力發電機組的平穩運行起著至關重要的作用,齒輪修形能有效地減小齒輪箱振動、降低噪音以及延長使用壽命。本文以5 MW功率分流風電齒輪箱為研究對象,簡要介紹了齒輪修形理論以及功率分流式風電齒輪箱的基本結構;利用Romax軟件建立了5 MW功率分流齒輪箱模型,利用載荷譜對齒輪箱進行靜力學仿真分析,根據齒輪載荷分布、傳動誤差等參數,對一、二級的齒輪進行齒廓和齒向修形,實現功率分流式風電齒輪箱齒輪間的均載特性,減小齒輪傳動誤差。
功率分流;風電齒輪箱;齒輪修形;Romax;均載
風電市場去補貼的時代即將到來,國內風電行業競爭日益激烈,新興機型逐漸向大兆瓦、輕量化、高可靠性、低成本的方向發展。風電齒輪箱[1]作為風力發電機關鍵部件之一,因為多變的工況載荷及制造安裝誤差等因素,使得齒輪不可避免地產生沖擊、振動和偏載,從而導致齒輪在早期失效概率增加。如何提高齒輪箱的均載特性、延長壽命成為風電行業關注的熱點問題。對齒輪進行修形,能有效減少輪齒受載變形和制造誤差引起的嚙合沖擊,獲得較為均勻的載荷分布,提高齒輪的的嚙合性能和承載能力。國內外許多專家學者[2-4]對齒輪修形進行了大量研究,范孝良等[5]利用Romax建立了2 MW齒輪箱模型,采用齒向和齒闊修形方法有效地降低傳動誤差,提高了齒輪的承載能力;王彬等[6]以中低速齒輪箱為研究對象,通過Romax進行仿真分析和優化,對比了齒輪修形前后載荷分布情況,得出了合理修形能夠改善齒面載荷分布和減小傳遞誤差的結論;方振江[7]利用Romax建立功率分流齒輪箱模型,并對此進行分析優化,極大地減少了設計失誤。由此可見,深入研究齒輪修形[8-9]技術對風電齒輪箱具有重要意義。
1 齒輪修形理論
圖1為一對齒輪的嚙合過程,隨著齒輪的旋轉,齒輪嚙合線進入嚙合,由于齒輪副均為彈性體,在力的作用下齒輪將會發生彈性變形,使主、被動齒輪的基節不再相等。如圖1(a)所示,當齒對2進入嚙入位置時,由于齒對1的變形,主動輪基節P1<被動基節P2,導致齒輪嚙入點嚙合力增加,形成嚙入沖擊。相同地,如圖1(b)所示,在齒對1即將脫離嚙合接觸時,由于齒對2的變形,P1>P2,主動輪齒頂將沿著被動輪齒根刮行,形成嚙出沖擊。
齒輪裝置在功率傳遞時,由于受到載荷的作用,各個零部件都會產生不同程度的彈性變形,包括輪齒、輪體、箱體、軸承等的變形。尤其是與齒輪相關的彈性變形,如輪齒變形和輪體變形,會引起齒輪的齒廓和齒向的畸變,使齒輪在嚙合過程中產生沖擊、振動和偏載。為了消除輪齒嚙入和嚙出沖擊,通常采用齒廓修形的方法,即沿著齒高方向從齒面上去除一部分材料,從而改變齒廓形狀,消除齒對在嚙入、嚙出位置的幾何干涉。而齒向修形是根據輪齒受力后產生的變形,將齒輪螺旋角和軸向齒形按預定規律進行修正,以獲得較為均勻的齒向載荷分布。
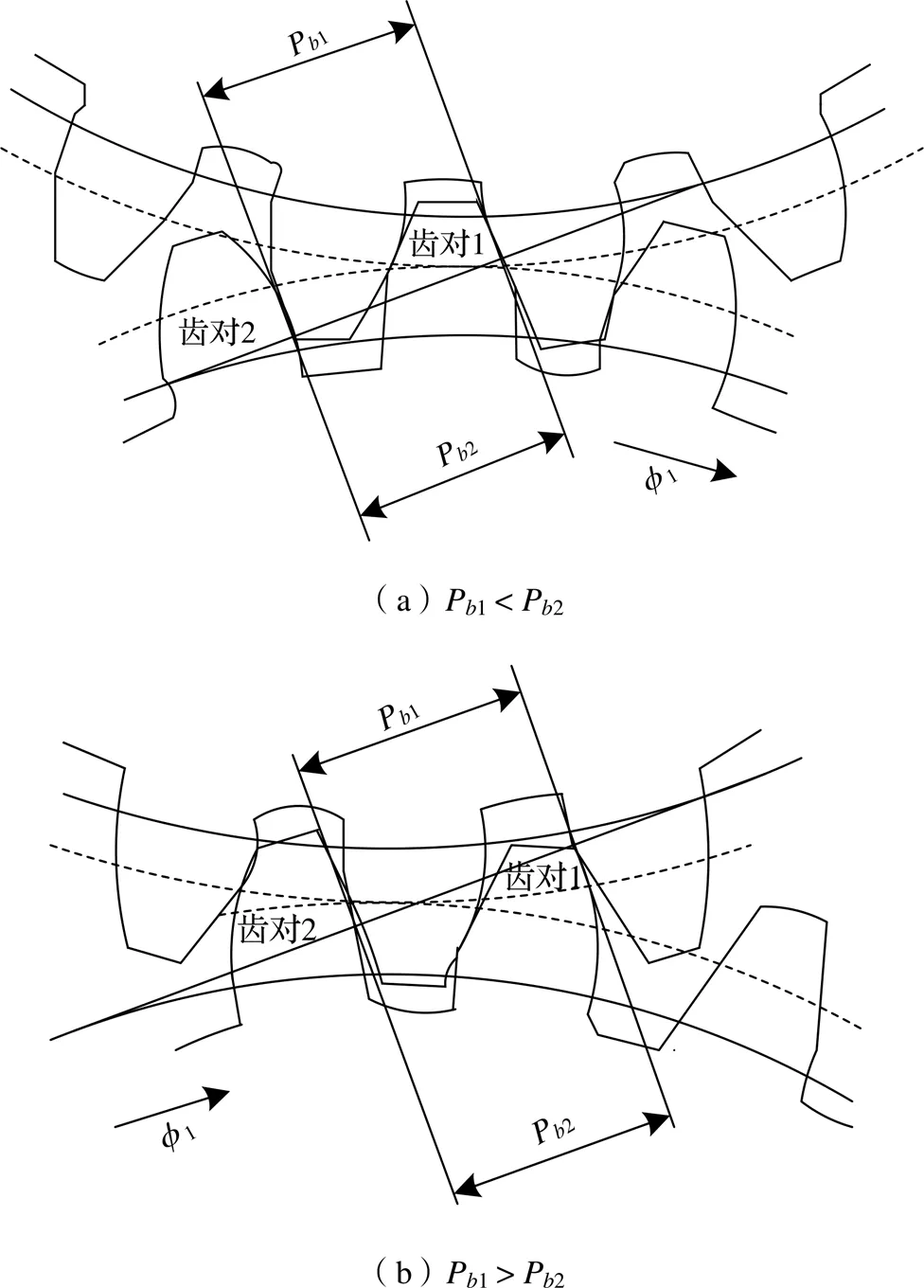
圖1 一對齒輪的嚙合過程示意圖
2 功率分流風電齒輪箱基本結構及傳動原理
圖2為某5 MW功率分流風電齒輪箱[10]傳動系統的結構簡圖,表1為齒輪箱基本參數表。該系統由兩級行星齒輪傳動構成,輸入軸同時與第一級內齒圈和第二級行星架固定連接,第一級行星架固定,第一級的太陽輪與第二級的內齒圈固定連接且浮動,第二級太陽輪作為輸出軸。輸入力矩一部分由第一級的內齒圈承擔,另一部分由第二級的行星架承擔,因而被稱為功率分流,最后在第二級太陽輪實現匯流。這種結構的齒輪箱空間布局緊湊,大大減少了齒輪箱尺寸,從而節省了制造成本。
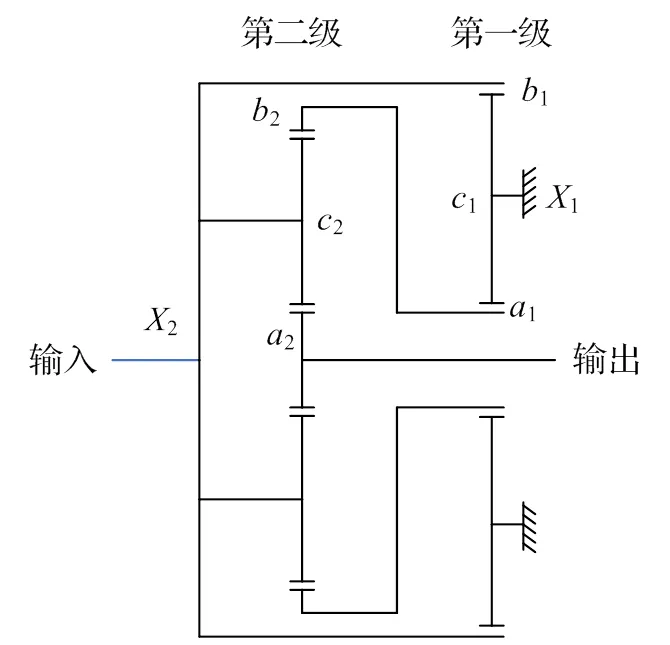
圖2 功率分流齒輪箱結構簡圖
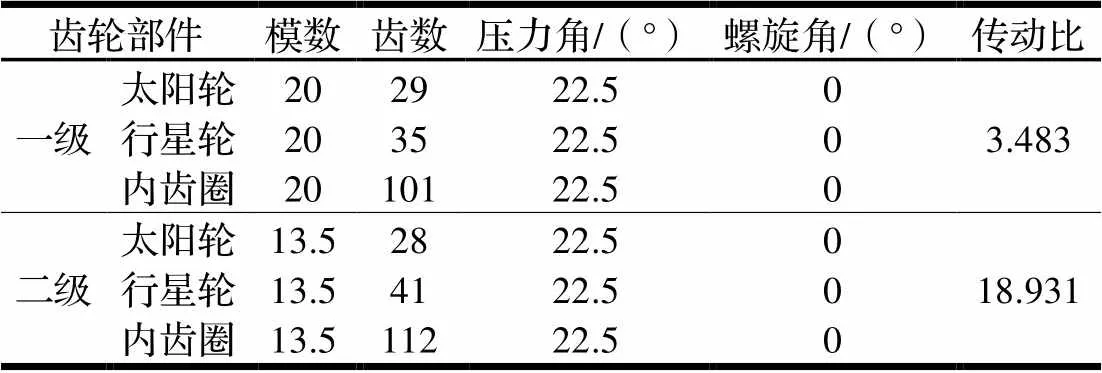
表1 齒輪參數
令第一級行星的太陽輪、行星輪和內齒圈齒數分別為1、2、3,轉速分別為1、2、3,第二級行星的太陽輪、行星輪和內齒圈齒數分別為1、2、3,轉速分別為1、2、3。
第一級行星架固定,等價于定軸輪系,則第一級太陽輪的轉速為:
所以有:
第二級內齒圈與第一級太陽輪的轉速相同,即:
對于第二級,全局附加逆時針轉速n',則第二級行星架的轉速為零,等價于定軸輪系,則第二級太陽輪的轉速為:
所以:
又有:
將式(1)、(2)和(4)代入式(3)得:
則差動行星的傳動比為:
第一級齒圈輸入功率占總功率百分比為:
將齒輪參數代入式(9),可得第一級行星功率分流比重為73.5883%,第二級行星功率分流比重為26.4117%。
3 Romax系統建模
根據5 MW功率分流齒輪箱的結構尺寸參數,在Romax中建立齒輪箱傳動鏈,為了使仿真結果與齒輪箱實際運行工況更加吻合,將考慮輪轂、發電機等零部件對齒輪箱的影響。建模分成兩部分:一是運用三維參數化建模,對于軸、齒輪、軸承等可視作剛體的零部件,在Romax中直接建模,并定義材料屬性;二是對于輪轂、行星架、箱體、發電機外殼等柔體類零部件的建模,通過有限元軟件進行網格劃分,并定義材料屬性,并在Romax中定義Stiffness Component組件,將有限元模型導入其中,獲得節點形式的柔性體三維模型,最后再通過縮聚節點與其他剛體零件連接在一起。圖3所示為5 MW功率分流齒輪箱傳動系統模型。

圖3 5 MW功率分流齒輪箱傳動系統模型
4 齒輪修形仿真分析
4.1 齒廓修形
齒廓修形采用漸開線曲線長修形,適用于風電齒輪箱中的大載荷,其中行星輪按照與內齒圈嚙合點選取修形起始點。齒廓最大修形量由齒輪受載產生的變形量決定,采用石川公式法[11]確定最大修形量。圖4為改進石川法近似齒形,圖5為齒輪簡化圖。
根據石川公式,將齒輪看做一個由梯形和長方形組成的懸臂梁。
齒輪在載荷作用點沿嚙合線方向的變形量可以表示為:

式中:δBr為長方形部分的彎曲變形量,mm;δBt為梯形部分的變形量,mm;δS為由剪力產生的變形量,mm;δG為基礎部分傾斜產生的變形量,mm;δw為腹板產生的變形量,mm。

r.分度圓半徑rb.基圓半徑hDi.腹板半徑
長方形部分的彎曲變形量如式(11)所示,梯形部分的變形量如式(12)所示,剪力產生的變形量如式(13)所示,基礎部分產生的變形量如式(14)所示,切向力和彎矩對腹板產生的變形如式(15)所示。
式中:F為嚙合點受力,N;α為齒輪嚙合角,rad;為彈性模量,MPa;為齒厚,mm;為泊松比。




最大修形量為:
式中:1、2為對應于各個齒輪的變形值,mm;δ為齒輪接觸部分的變形量,mm。
4.2 齒向修形
4.2.1 鼓形修形
齒輪傳動系統在載荷的作用下會產生彈性變形,包括輪齒的彎曲變形、剪切變形和接觸變形,還有支撐軸的彎曲變形和扭轉變形,這些變形將會使輪齒的螺旋線發生畸變,導致輪齒沿一端接觸,造成載荷分布不均勻,出現偏載現象。
設計鼓形修形的最主要的、目的是保證在最大嚙合歪斜度條件下互相嚙合的齒輪不發生端點接觸——相切而不相割,減少棱邊效應;同時還應保證在不傾斜或少量傾斜情況下,最大限度地減少單位齒長上的載荷。圖6為鼓形齒結構圖。
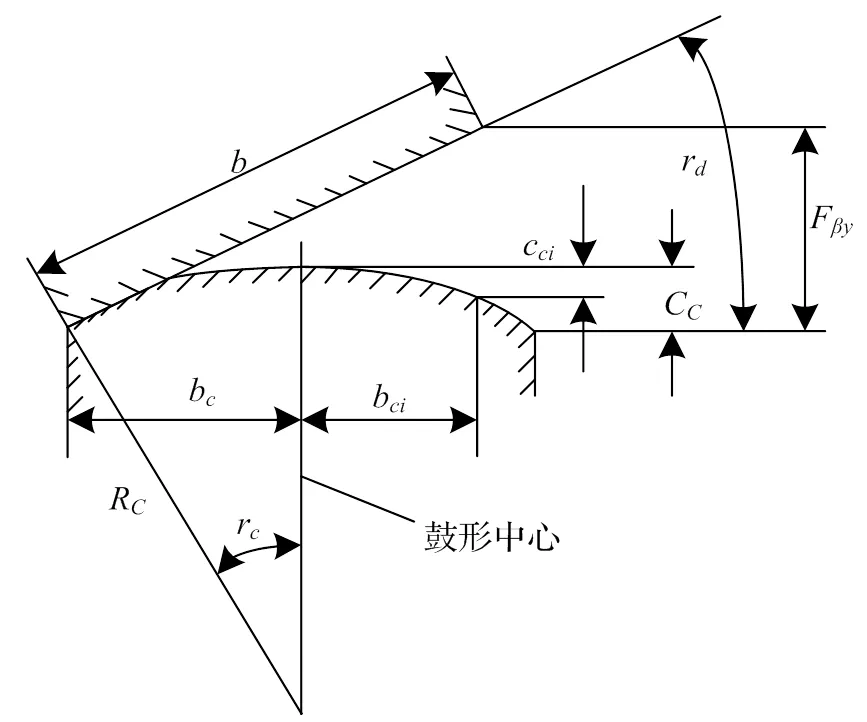
圖6 鼓形齒結構
本文對鼓形量的求解僅考慮嚙合歪斜度,并未考慮輪齒的變形因素。
只考慮歪斜度所需要的鼓形量為:
當鼓形中心在齒寬的中間,則有:

影響嚙合歪斜度F的主要因素有空間幾何因素、機件剛度因素及工作條件因素。本中采用ISO計算方法求解嚙合歪斜度,即:
初始嚙合齒向誤差F按三種情況求解:
(1)在載荷作用下沒達到全齒寬接觸或未能驗證有良好的接觸,有:

(2)當已正是達到所希望的接觸斑點,有:

(3)在載荷作用下達到理想接觸斑點,有:
式中:Fmax為最小嚙合齒向誤差,mm;f為綜合變形產生的嚙合齒向誤差分量,mm;f為制造安裝誤差產生的嚙合齒向誤差分量,mm;f6為GB 10095-88的6級精度的齒向公差,mm;y為齒向跑合量,mm。
4.2.2 螺旋角修形
當齒輪的精度和傳動結構形式確定,則嚙合歪斜度F也就確定下來,因此引入螺旋角修形,即在一對嚙合齒輪副中的一個齒輪齒向方向有一個偏斜量,以彌補部分歪斜度。帶鼓形量的螺旋角修形,不僅可以保證相切而不相割的條件,同時又能最大限度提高齒輪承載能力。
對于太陽輪的扭轉變形,假設齒寬方向上載荷均勻分布,則最大相對扭轉角為:
式中:為扭轉角,rad;為剪切彈性模量,MPa,齒輪鋼一般取=7.95×104MPa;I為極慣性矩,mm4,I=π4/32K;為分度圓直徑,mm;K為考慮齒輪內孔影響的系數,K=[1-(d/)]-1;d為內孔直徑,mm;w為單位齒寬載荷,N/mm,w=F/;F為總切向力,N;為齒寬,mm;為齒寬方向上坐標,mm。
則齒寬范圍內的最大相對扭轉變形為:
式中:δ為扭轉變形,mm。
令寬徑比Ψ=/,則有:
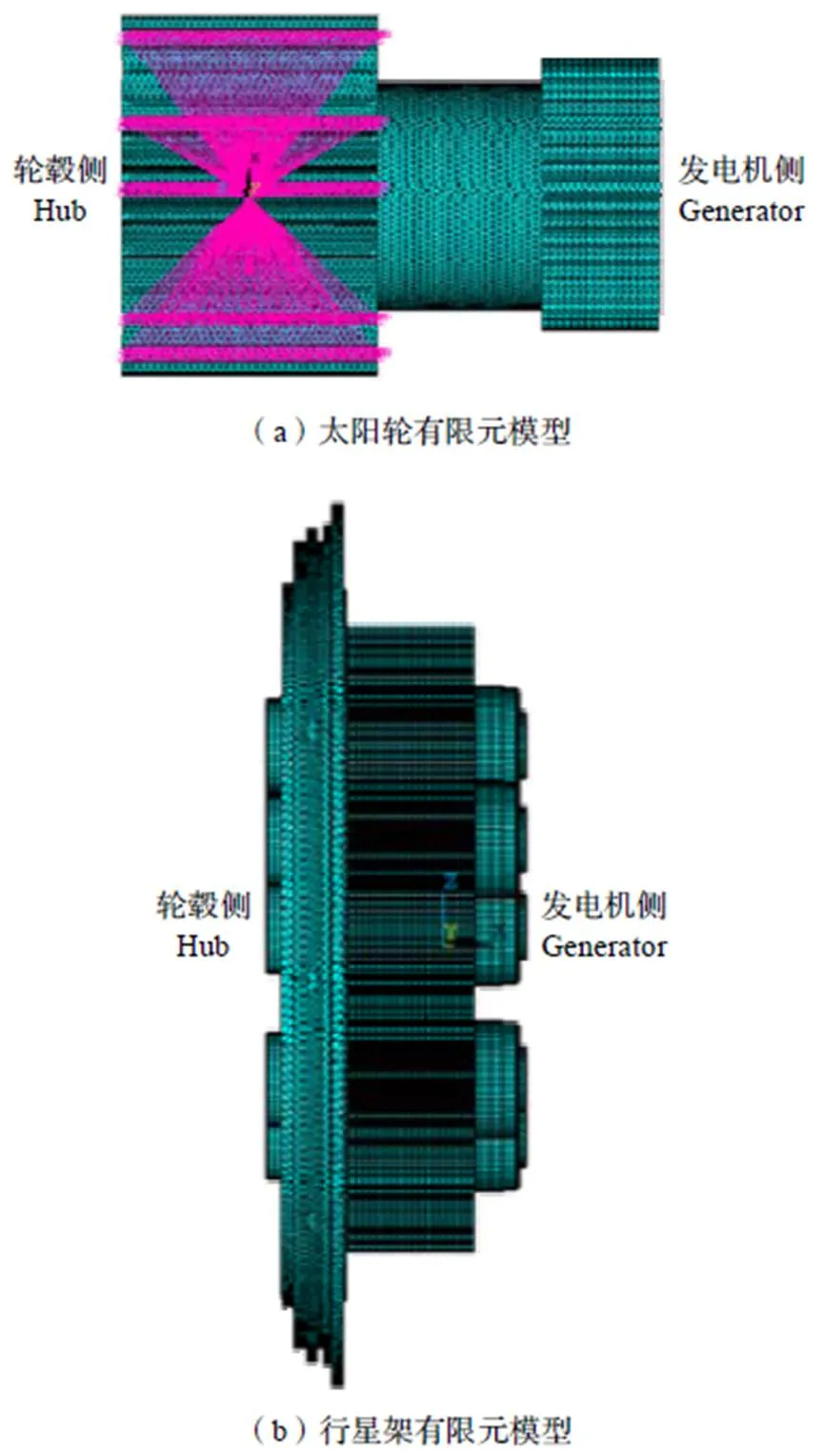
通過有限元計算同樣可以得到軸和行星架的扭轉變形。圖7是太陽輪、行星架、行星輪有限元模型。
行星輪采用柔性銷結構支撐,按理只需進行鼓形修形,但根據行星系統剛度在嚙合線方向反映的變形量可進行適當的螺旋角修形,修形量的大小根據行星輪在內嚙合處齒向的相對變形量,修形方向為右旋修形。齒廓修形同修形原則一致。
太陽輪螺旋線修形量同時考慮三個因素的疊加,①行星輪修形(右旋),②行星架的變形引起外嚙合處的變形(左偏),③太陽輪的扭轉變形,對于雙齒浮動(右偏)對應太陽輪上的螺旋線修形量為1=1左旋+2右旋+3左旋,鼓形修形量考慮嚙合歪斜度的影響。齒廓修形同修形原則一致。
內齒圈考慮到加工工藝等問題,一般不進行修形。
通過以上方法對一、二級的太陽輪、行星輪、內齒圈進行齒廓和齒向修形,在工程計算和有限元計算的結果上進行微調,得到齒輪修形參數如表2所示。
該模型僅考慮了扭矩,不考慮重力和彎矩的影響,齒輪箱額定輸入功率5620 kW,額定輸入轉速10.5 r/min,額定扭矩5111.5 kN·m。分別對齒輪箱修形前后進行Romax仿真分析。
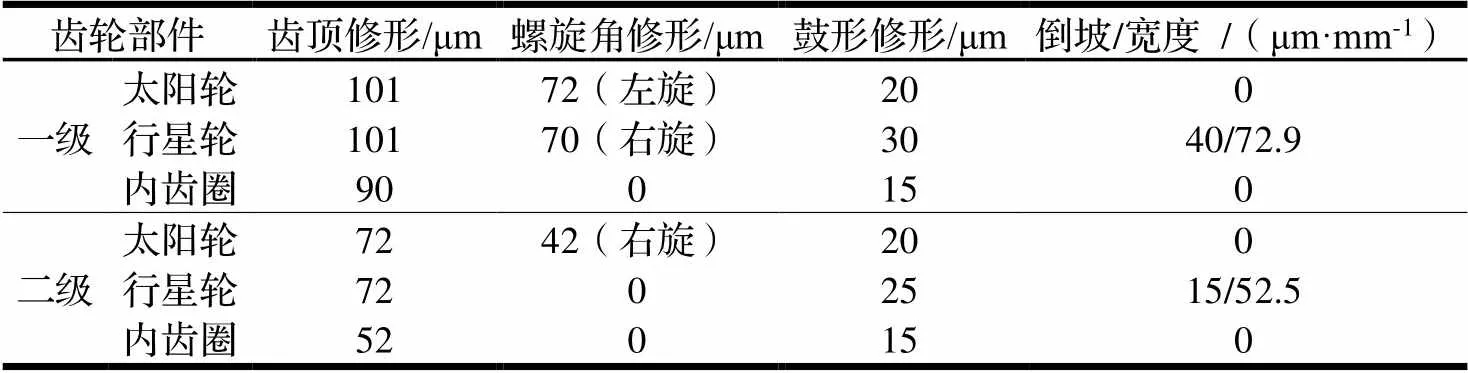
表2 齒輪修形參數
4.3 接觸斑
對比一、二級行星內外嚙合齒輪的接觸斑。圖8、圖9是修形前、后一級內齒圈和太陽輪上的接觸斑。圖10、圖11是修形前、后二級級內齒圈和太陽輪上的接觸斑。
通過對比修形前后齒輪的接觸斑,可以發現齒輪修形可以有效解決齒輪嚙合過程中的偏載問題。修形前,沿齒寬方向承受載荷的寬度約占整個寬度的1/2,且載荷分布極不均勻。修形后,在齒寬方向上,載荷由中間向兩邊遞減,呈對稱分布,齒面受載更加均勻,且齒寬方向參與承載的寬度變大了,整個齒寬方向上幾乎都有載荷分布,增加了齒輪的承載能力。
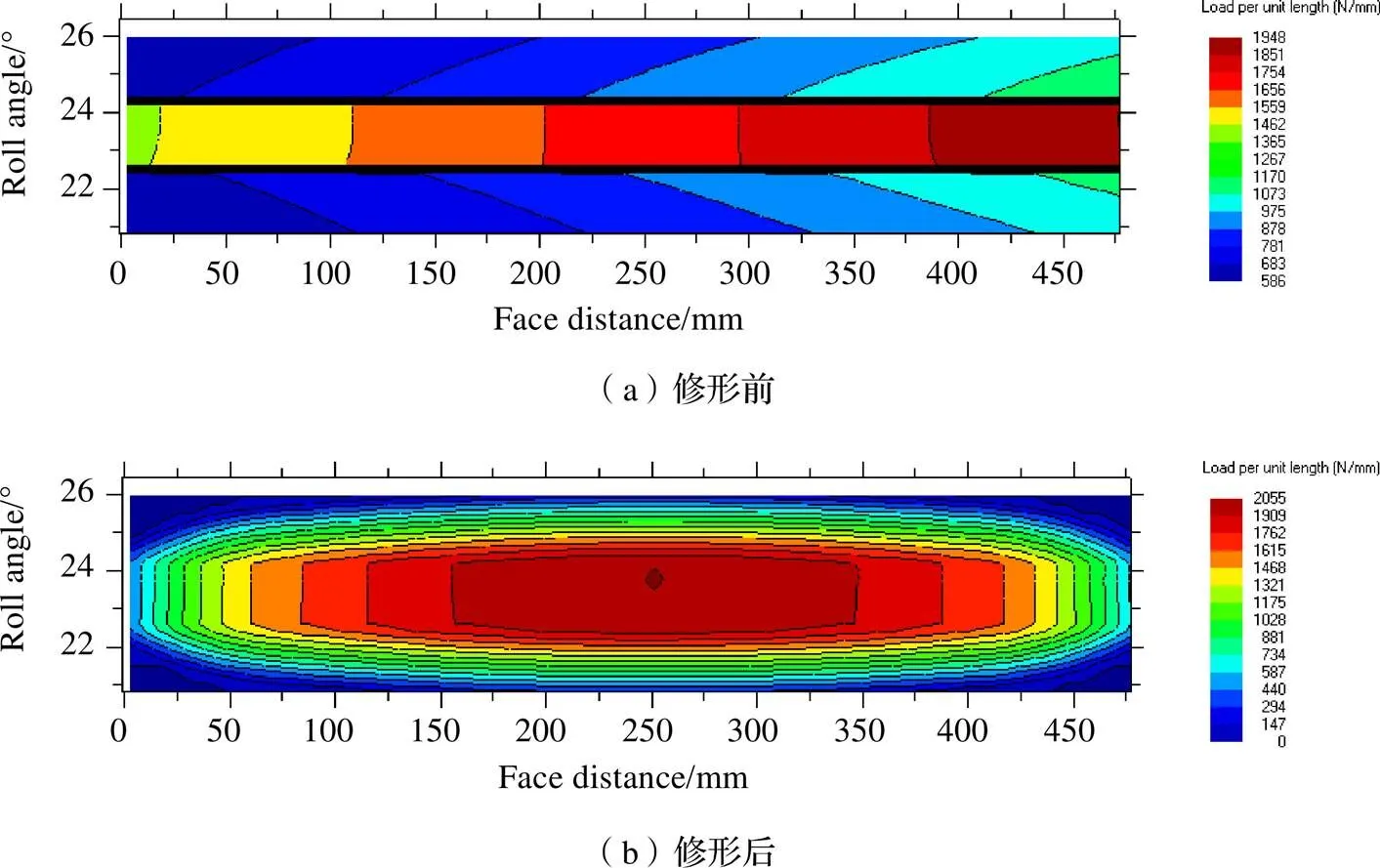
圖8 一級內嚙合修形前后接觸斑
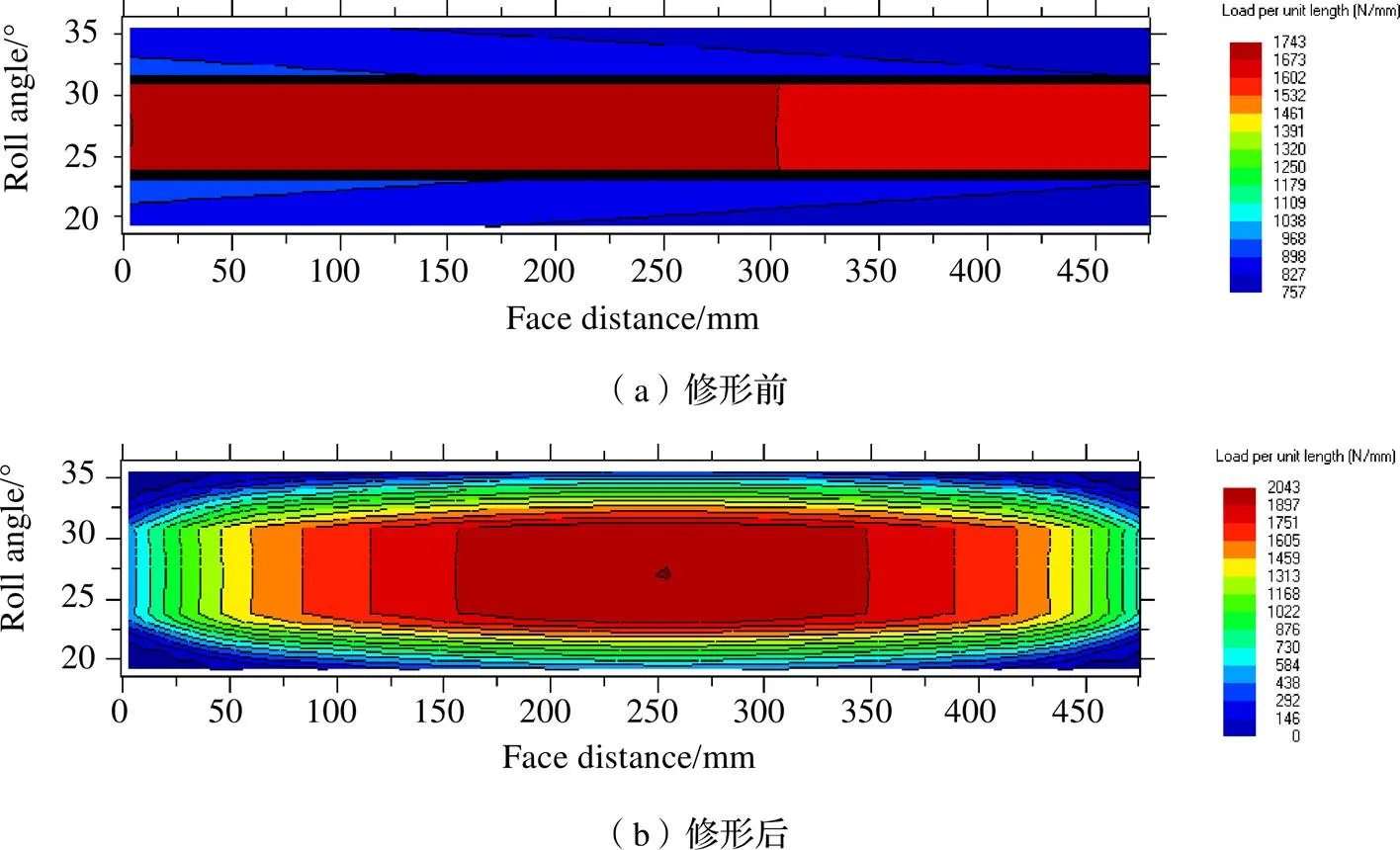
圖9 一級外嚙合修形前后接觸斑
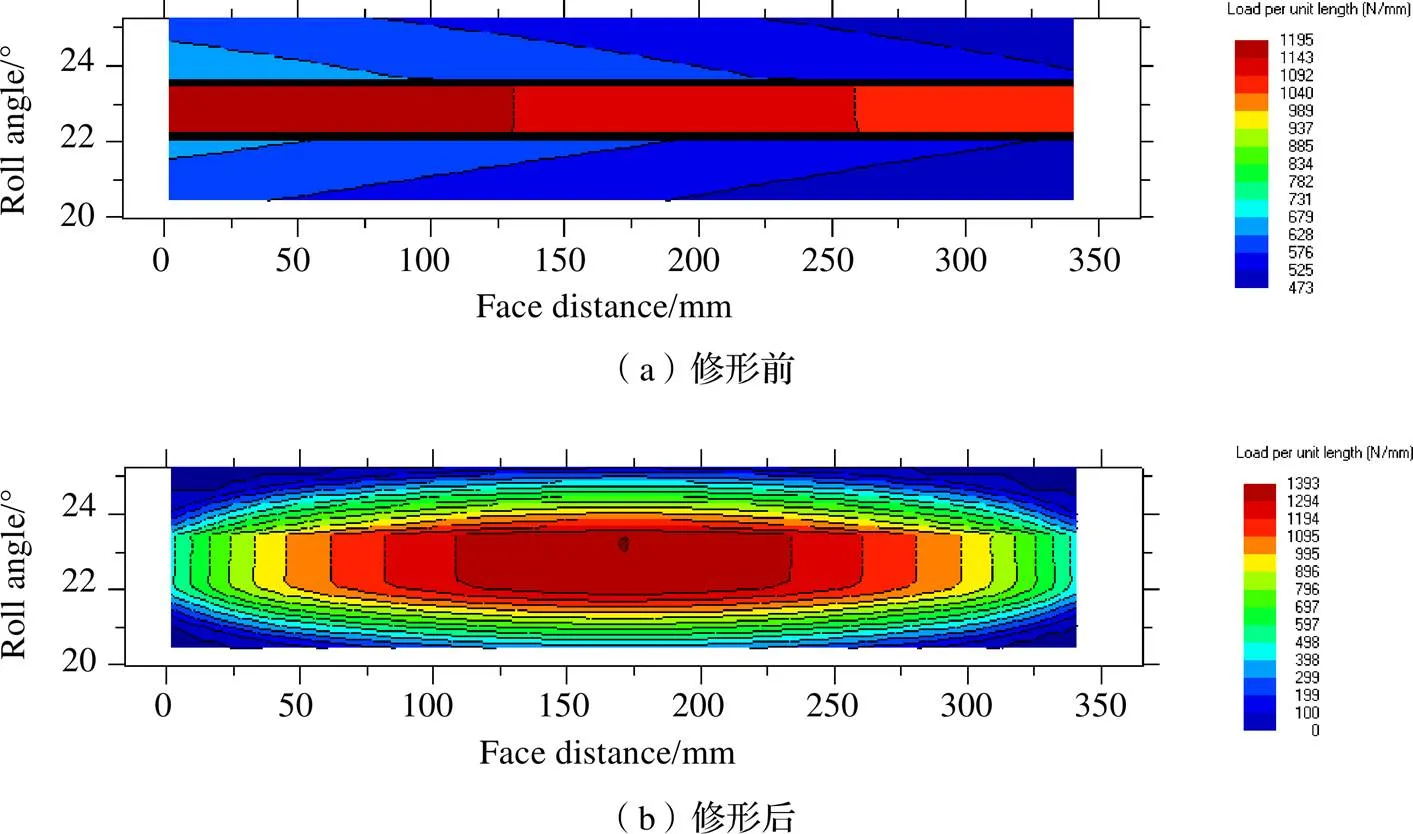
圖10 二級內嚙合修形后接觸斑
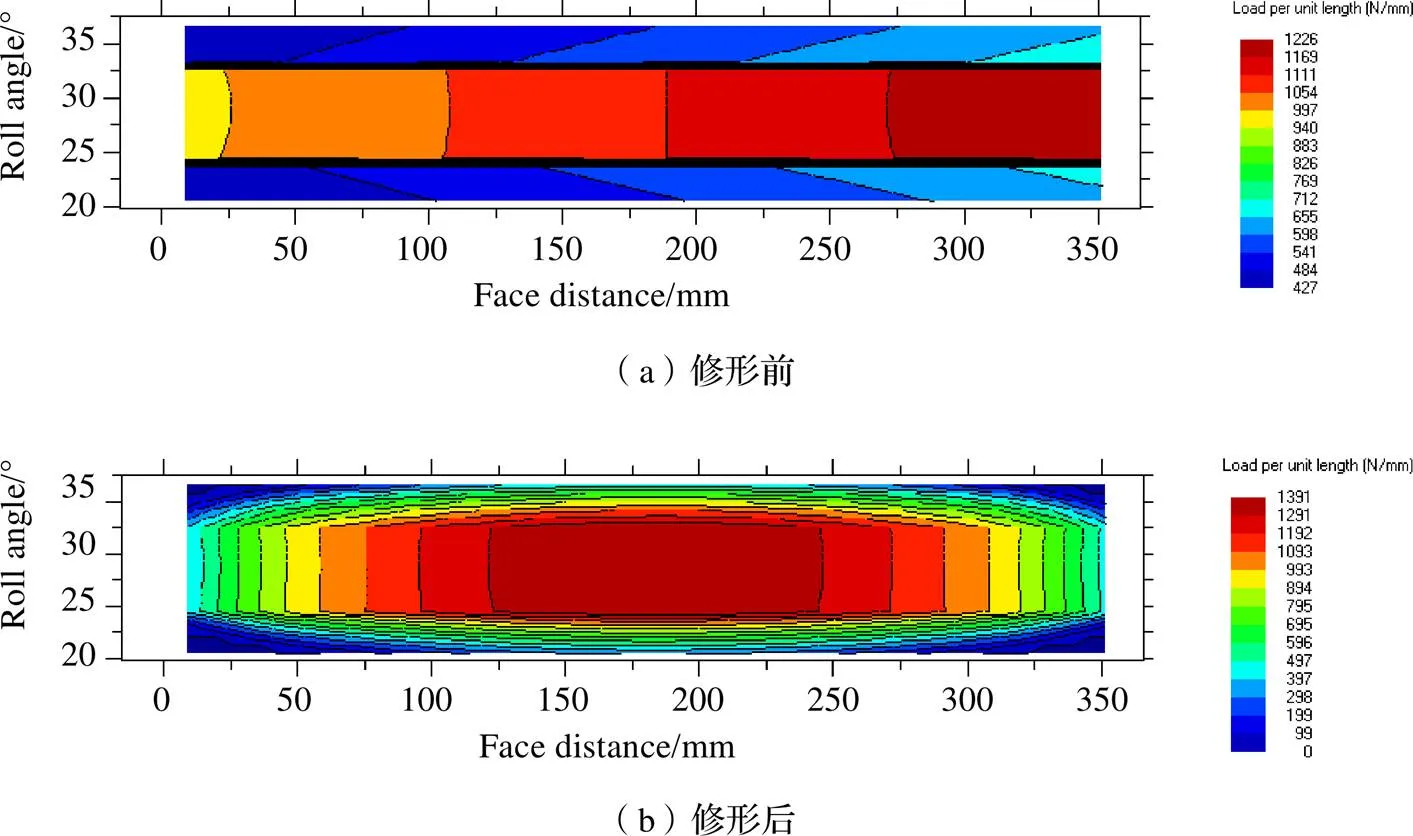
圖11 二級外嚙合修形前后接觸斑
4.4 傳動誤差
由于齒輪在制造、安裝等過程中產生的誤差,齒輪在受載后將發生彈性變形,從而導致主從動輪之間不均勻轉動,傳遞誤差[12]即為描述齒輪間不均勻轉動的重要參數,是反映齒輪系統動態性能的重要指標。顯然,傳遞誤差的波動對傳動系統的振動、噪音有著重要影響。
分別對比一、二級行星內、外嚙合齒輪的傳遞誤差如下。
圖12為一級行星內嚙合修形前后的傳遞誤差,修形前傳遞誤差約為48 μm,修形后傳遞誤差約為16 μm,比修形前降低了26 μm。圖13為一級行星外嚙合修形前后的傳遞誤差,修形前傳遞誤差約為44μm,修形后傳遞誤差約為14 μm,比修形前降低了30 μm。
圖14為二級行星內嚙合修形前后的傳遞誤差,修形前傳遞誤差約為29 μm,修形后傳遞誤差約為11 μm,比修形前降低了18 μm。圖15為二級行星外嚙合修形前后的傳遞誤差,修形前傳遞誤差約為31 μm,修形后傳遞誤差約為17 μm,比修形前降低了24 μm。
通過對比齒輪副修形前后的傳遞誤差可以發現,齒輪修形雖然不能完全消除傳遞誤差,但可以大幅度減小傳遞誤差,對齒輪的動態性能有極大的改善。
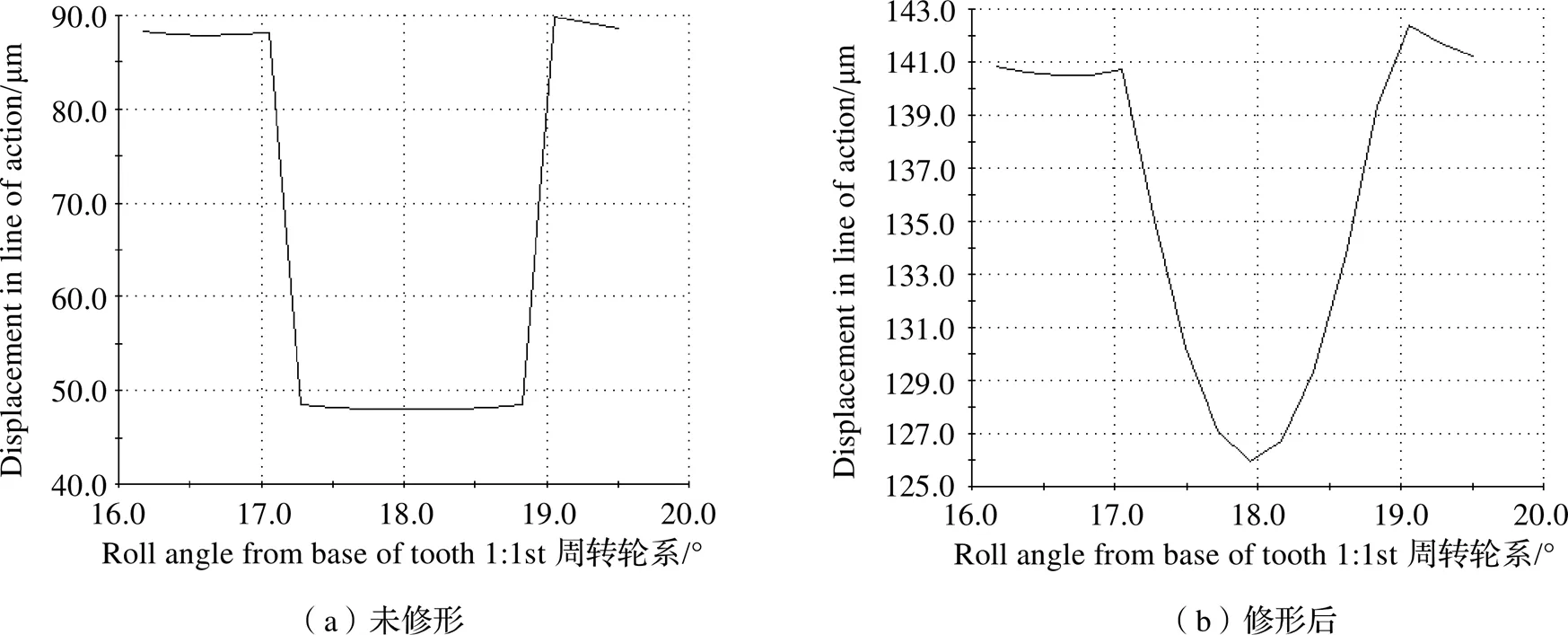
圖12 一級內嚙合傳遞誤差
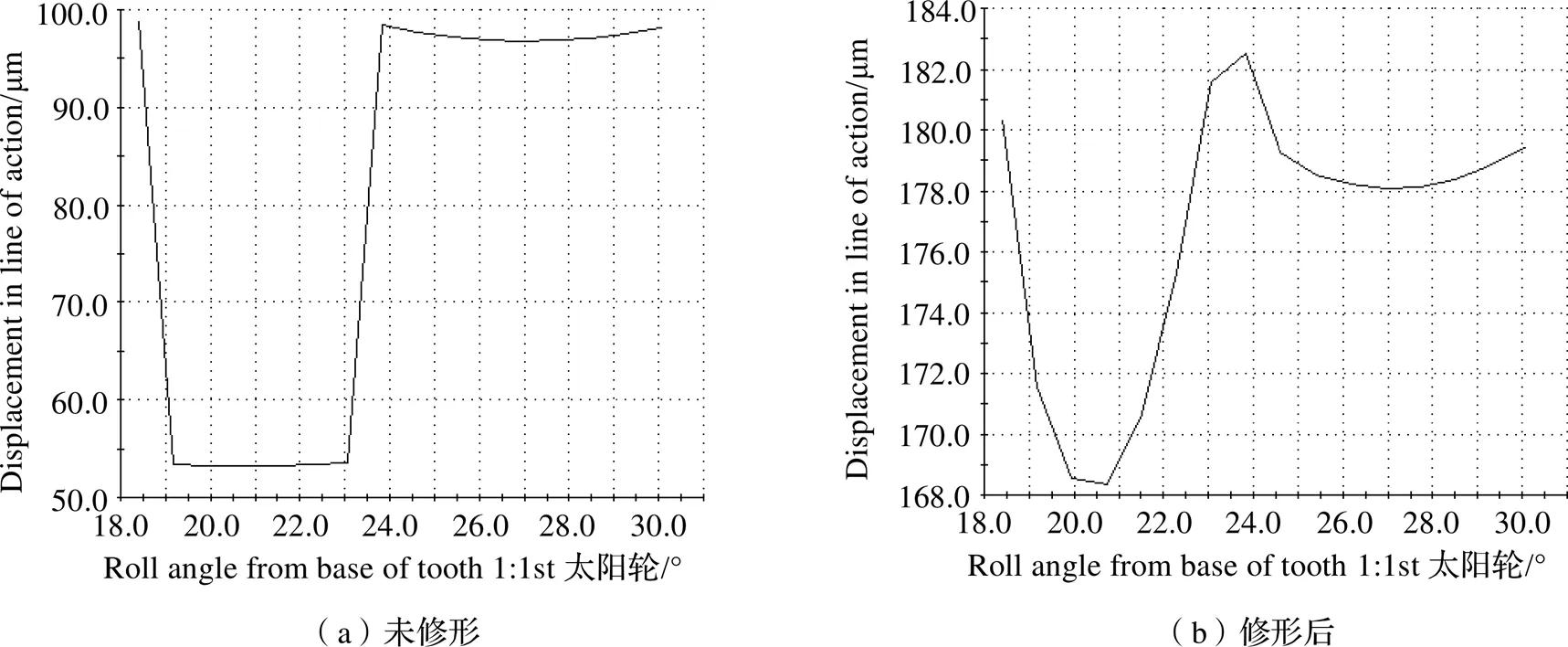
圖13 一級外嚙合傳遞誤差
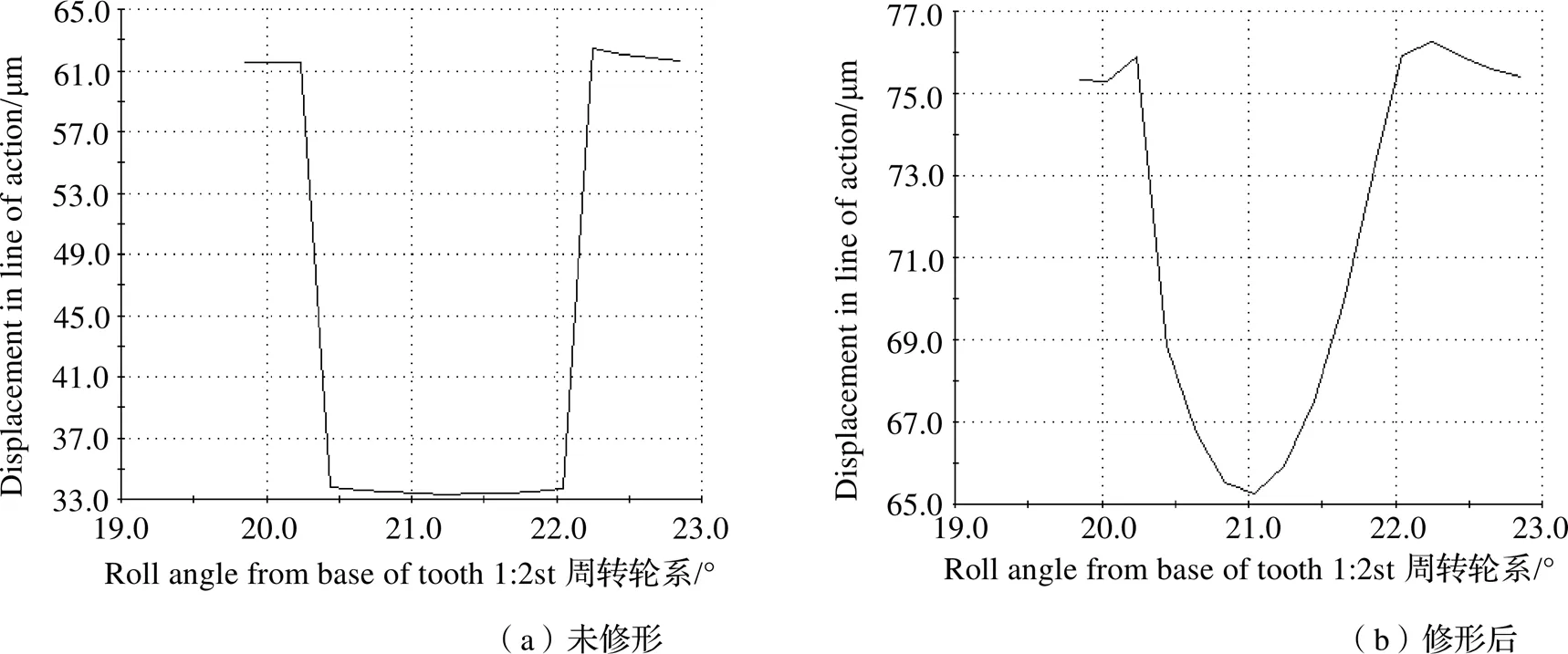
圖14 二級內嚙合傳遞誤差
5 結論
本文簡要介紹了齒輪修形原理以及功率分流齒輪箱的基本結構,通過Romax軟件建立了某型號5 MW功率分流齒輪箱傳動模型,同時考慮輪轂、發電機外殼對整體模型的影響。對比修形前后內外嚙合齒輪接觸斑的分布情況,結果顯示:修形前,沿齒寬方向承受載荷的寬度約占整個寬度的1/2,且載荷分布極不均勻;修形后,在齒寬方向上,載荷由中間向兩邊遞減,呈對稱分布,齒面受載更加均勻,且齒寬方向參與承載的寬度變大了,整個齒寬方向上幾乎都有載荷分布,增加了齒輪的承載能力。對比齒輪副修形前后的傳遞誤差可以發現,齒輪修形雖然不能完全消除傳遞誤差,但是可以大幅度減小傳遞誤差,對齒輪的動態性能有極大的改善。
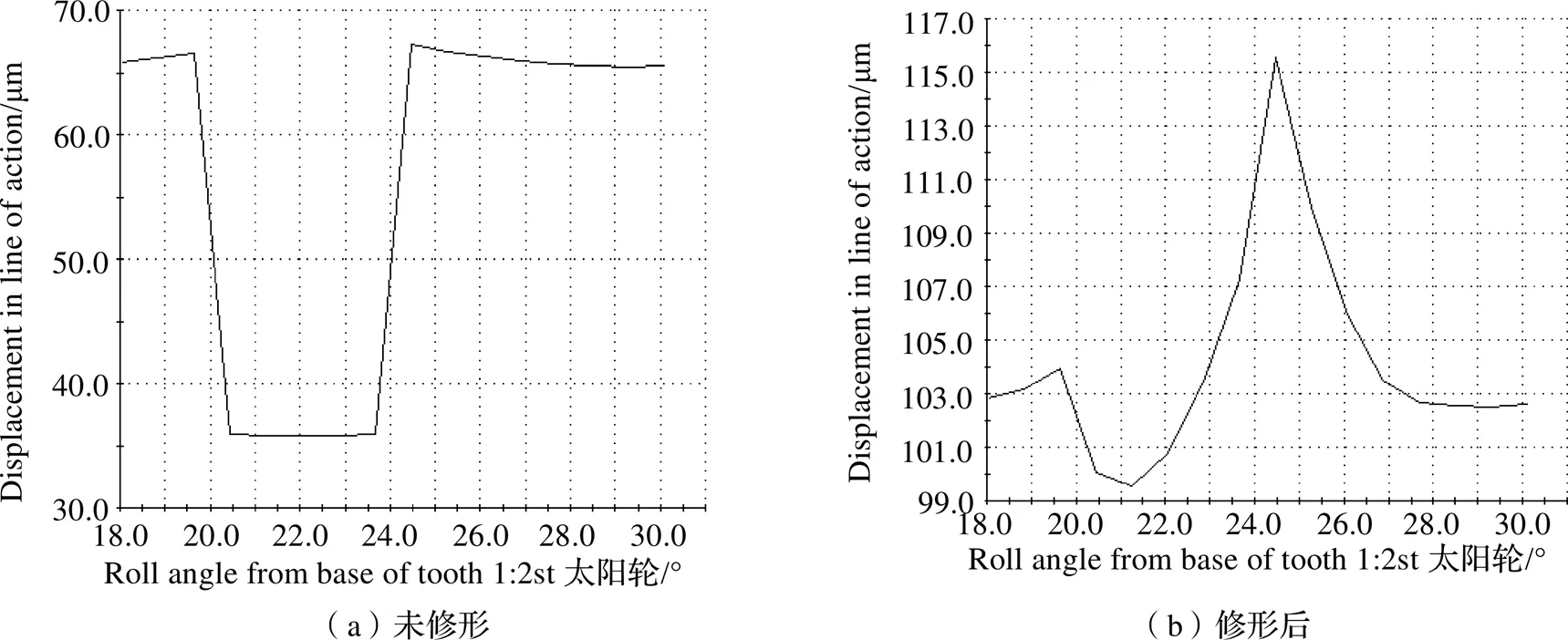
圖15 二級外嚙合傳遞誤差
[1]GB/T 19073-2018,風力發電機組齒輪箱設計要求[S].
[2]Hsiang Hsi Lin,Fred B. Oswald,Dennis P. Townsend. Dynamic loading of spur gears with linear or parabolic tooth profile modifications[J]. Mechanism & Machine Theory,1989,29(8):1115-1129.
[3]陳方明,王慶良. 風電齒輪箱齒輪修形設計及研究[J]. 機械傳動,2018,42(12):155-159.
[4]李銳. 輪齒修形對風電增速齒輪箱靜動態特性影響分析[D]. 重慶:重慶大學,2019.
[5]范孝良,石鵬飛,劉建民. 風電齒輪箱微觀修形對振動與聲振粗糙度性能的影響[J]. 中國工程機械學報,2019,17(1):47-52.
[6]王彬,郭潤蘭,黃華. 基于Romax下的齒輪仿真分析及優化[J]. 機械制造與自動化,2017(1):101-104.
[7]方振江,華青松,馬文勇,等. 風電增速齒輪箱功率分流和柔性銷的設計計算[J]. 機械傳動,2016(12):85-88.
[8]湯亮,何仁杰,龔發云,等. 基于兆瓦級風電齒輪箱傳動特性的齒輪修形研究[J]. 武漢大學學報(工學版),2019,52(5):457-464.
[9]趙昕. 基于KISSsoft軟件的風電齒輪箱齒輪修形參數優化設計[J]. 機械工程師,2018,330(12):44-46.
[10]于印鑫,李寬,鄭朋,等. 功率分流式風電機增速箱振動特性分析[J]. 噪聲與振動控制,2019,39(6):19-24.
[11]日本機械學會,著. 李茹貞,趙清慧,譯. 齒輪強度設計資料[M]. 北京:機械工業出版社,1984:30-32.
[12]汪建,張俊. 輪齒修形對斜齒輪傳遞誤差影響的比較性分析[J]. 振動與沖擊,2018,37(2):254-260.
Simulation Analysis of Gear Modification of Power Distribution Gearbox Based on Romax
ZHOU Du,ZHENG Chuantong
( Wind Energy Research Institute,MingYang Smart Energy GroupLimited,Zhongshan 528437,China )
Gear modification can effectively reduce gearbox vibration and noise and extend the service life. This paper studies a 5 MW power-split wind power gearbox. Based on the theory of gear modification and the analysis of basic structure of the power shunt wind power gearbox, we establish a 5 MW power-split gearbox model with software Romax. A static simulation analysis of the gearbox is conducted by using the load spectrum, and tooth profile and tooth direction of the first and second stage gears is modified according to the gear load distribution, transmission error and other parameters. With tooth modification, the load sharing characteristic between the gears of the power split type wind power gearbox is realized, and the transmission error of the gears is reduced.
power-split;wind power gearbox;gear modification;Romax;load characteristics
TH131.6
A
10.3969/j.issn.1006-0316.2021.02.010
1006-0316 (2021) 02-0071-10
2020-04-05
周杜(1993-),湖南湘潭人,碩士,工程師,主要從事風電齒輪箱仿真工作,E-mail:zhoudu@mywind.com.cn;鄭傳統(1981-),四川成都人,碩士,工程師,主要從事風電齒輪箱仿真工作。
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36