全自動泊車系統的模型設計與仿真
2021-04-06 19:37:54高成舟戚曉利
時代汽車 2021年5期
高成舟 戚曉利
摘 要:全球汽車保有量的增多,直接造成城市交通的擁堵以及停車位空間的減小。隨之而來的就是泊車安全性問題,新手駕駛員或疲勞駕駛人員如何能在不發生碰撞的情況下,快速安全地泊車入庫,成為當下研究的熱點。針對以上問題,本文將對全自動泊車系統展開研究。基于B樣條曲線設計出泊車路徑,基于滑模變結構與預瞄方式進行泊車路徑的跟蹤。最后通過搭建SIMULINK與CARSIM仿真模型進行聯合仿真。
關鍵詞:自動泊車 路徑規劃 模糊理論 聯合仿真
從關鍵技術的角度而言,車位檢測、路徑規劃、運動控制成為國內研究的重點。對于路徑規劃的研究,主要有三種路徑規劃方式:文獻[1]采用模糊控制的策略、神經網絡,提出了來回多段移動式的泊車路徑規劃方法;文獻[2]提出了基于B樣條曲線、五次多項式曲線、貝塞爾曲線等曲率連續的泊車路徑規劃方法;文獻[3]提出了由圓弧和直線組成的曲率不連續的泊車路徑規劃方法。基于模糊控制策略、神經網絡路徑規劃的方法,在泊車過程中不需要停車轉動方向盤,但是計算量較大;基于曲率連續的路徑規劃,對車速的控制要求高,文獻[4]中采用B樣條曲線設計泊車路徑,雖實現曲率的連續性,但是未考慮方向盤轉速對跟蹤效果的影響和車速的控制;基于曲率不連續的路徑規劃,特別是兩段式泊車路徑規劃方法計算量小,但是泊車連貫性低。對于運動控制,由于泊車的起始位置相對單一,車運動過程中車速的波動,泊車終止位置范圍未進行明確定義,目前的控制算法還存在很多不足。文獻[5]中以滑動轉向的車輛運動學模型為基礎,針對不同泊車階段分別設計出不同的模糊邏輯控制方法。
針對上述出現的問題,本文基于B樣條曲線設計出泊車路徑,基于滑模變結構與預瞄方式進行泊車路徑的跟蹤。最后通過搭建SIMULINK與CARSIM仿真模型進行聯合仿真。
1 基于B樣條理論的路徑規劃
1.1 B樣條理論基礎
B樣曲線是針對貝塞爾曲線存在的不足,Gordon等人用n次B樣條基函數改進了其不足之處,通過改進后構造出B樣條曲線。相比之下,B樣條曲線具有貝塞爾曲線所不具備的局部調整等優勢。B樣條曲線被推廣到用于多階平滑的泊車路徑規劃中,且通過控制點變量可對曲線進行局部調整。調整階次來控制所規劃的泊車路徑的平滑度,調整控制點以此來改變路徑的形狀變化。
1.2 路徑規劃
路徑規劃問題可以描述為自行車輛自動檢測停車位后,尋找出來的一條滿足多個約束的路徑曲線。路徑曲線需要滿足如下的幾個約束:①泊車安全性問題②車輛可跟蹤性,即滿足車輛角約束、角速度約束,使得車輛更具有跟蹤性;③避免原地轉向的發生;④泊車結束后車倆個的規范停放。
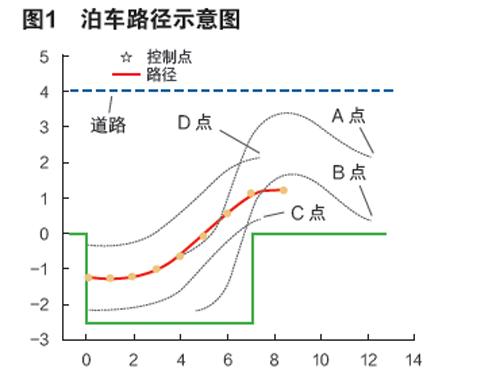
本文以平行泊車為例,分析其碰撞約束條件、車輛參數約束、車輛性能約束、停車規范約束,基于B樣條理論規劃出滿足多約束的泊車路徑。泊車路徑如下圖1所示。
由下圖可知,車輛在該工況下,從起始位置(8.35,1.24)泊入到目標位置(0.85,0),自行車輛與周圍的障礙車輛不會發生碰撞,因此,基于B樣條理論的多階路徑可以滿足避障約束。
2 聯合仿真
2.1 SIMULINK模型搭建
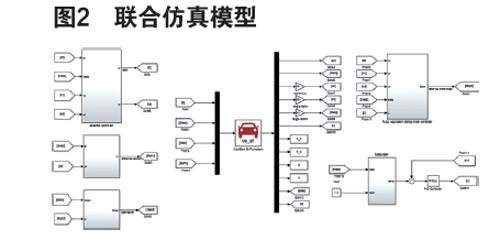
Carsim具有良好的擴展性,可以與Simulink進行數據的實時交換,通過上一章節設計的泊車模型,結合自行車輛的檢測部分的相關模塊與Carsim S-Function,搭建出滿足本文所設計的泊車系統要求的一個聯合仿真模塊,如下圖2所示。
2.2 CARSIM模型搭建
本次將用Carsim與Simulink聯合搭建測試環境,車輛的基本參數選擇如下:選擇F-Class車型,長寬高分別為4647mm,1810mm,1468mm,前置前驅,最大功率125KW,其他參數默認選擇;車輛的動力學參數設置分別為:車速-3km/h、誤差±0.3km/h、運動過程中無制動設置、運動狀態下處于倒擋模式、其它相關參數設置為默認值;測試場景的參數設置為:1200m單車道場景與200m Light Grass、0.8摩擦系數、自行車輛與障礙車輛的車型選擇均為F-Class車型、障礙車輛的尺寸默認,有效車位的大小為7.5m×2.5m,其它參數均為默認值。如下圖3所示。
2.3 仿真試驗
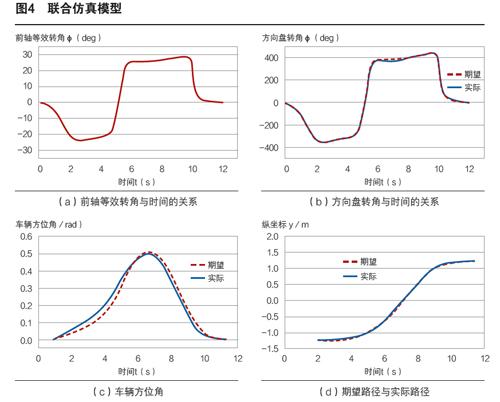
通過Carsim與Simulink聯合搭建的軟件在環實驗(Software in Loop),通過Simulink仿真軟件搭建所設計的泊車系統結構模型,Carsim軟件設置自行車輛與障礙車輛的相關參數與運動過程中所需要的道路環境相關參數,最后進行聯合仿真。將通過軟件在環實驗聯合仿真的結果與實際所測得的數據進行對比分析,通過實驗分析的結果來判斷所設計模型算法的控制精度是否可以滿足精確泊車的需求。本次聯合仿真實驗所配置的自行車輛的車速大小為3km/h,各項數據仿真的結果如上圖4所示。
上圖(a)為車輛前軸等效轉角與時間的關系,車輛的前軸等效轉角在[-30°,30°]的范圍內,為了防止原地轉向,車輛起始時的前軸等效轉角變化緩慢,泊車結束,為了車身與車輪回正,泊車結束時的前軸等效轉角變化也較為緩慢。(b)圖為預期的方向盤轉角和實際的方向盤轉角與時間的變化關系,從圖中可以看出其變化范圍為[-495°,495°],當自行車輛停進車位后,自行車輛的方向盤回正,也就是說方向盤轉角大小為0°。(c)圖可以看出車身方位角與時間的變化關系,車輛起始與結束時的車身方位角均為0°,當時間為6.5s時候,實際的車身的方位角與預期的車身方位角從圖中可以看出已經達到最大,之后隨著方向盤的反向轉動,車身方位角的變化也會隨著方向盤的轉動逐漸變小,從結果分析來看其實際的變化基本與預期的結果基本可以吻合。(d)圖為泊車路徑,可以將泊車的路徑看作一條平滑的曲線,實際的路徑跟蹤與預期的路徑基本重合,可以說明所設計的模型跟蹤效果較為良好。
3 結語
基于B樣條理論的曲線擬合方法應用于泊車路徑規劃中的可行性。本章對設計的泊車系統建立聯合仿真模型。通過仿真可以看出本文設計的模型跟蹤效果良好,模型具有一定的可行性,為試驗的開展做好了鋪墊。
參考文獻:
[1]自動平行泊車系統的研究[D].合肥:中國科學技術大學,2010.
[2]Maekawa T,Noda T,Tamura S. Curvature continuous path generation for autonomou-s vehicle using B-spline curves [J].Computer-Aided Design,2010,42(4):350-359.
[3]張野,陳慧,程昆朋.基于兩步法的平行泊車分段路徑規劃算法[J].計算機仿真,2013,30(6):169-173.
[4]李紅,郭孔輝,宋曉琳.基于樣條理論的自動垂直泊車軌跡規劃[J].湖南大學學報(自然科學版),2012,39(7):25-30.
[5]Zhao Y,Collins E G. Fuzzy parallel parking control of autonomous ground vehicles in tight spaces[J]. IEEE International Symposium on Intelligent Control Houston Tx P-p-,2003:811-816.
