純電動汽車自動駕駛功能設計
2021-04-09 05:50:35李小潤鐘日敏黃祖朋趙小羽沈陽
時代汽車 2021年6期
李小潤 鐘日敏 黃祖朋 趙小羽 沈陽
摘 要:針對純電動車自動駕駛功能,設計一種利用PID算法對車輛的驅動扭矩進行控制的系統,使得車輛的實際速度與駕駛員的期望速度一致,實現車輛自動駕駛的功能。通過實車驗證和調試,該控制系統具有良好的響應精度。相較于傳統汽車通過控制噴油量的多少來控制車速,具有更好的魯棒性和實時性。
關鍵詞:純電動車 自動駕駛 PID控制
1 引言
在節能減排的法規日益嚴格及智能駕駛不斷興起的背景下,全球汽車行業關于純電動車的關注和投入火速增加。美國學者麥肯錫預測,到2025年無人駕駛汽車可以產生2000億~1.9萬億美元的產值;市場研究公司IHS預測, 2035年4級完全無人駕駛車每年銷量可達480萬輛。對任何一個行業而言,這都具有足夠的市場誘惑。[1]當前各主機廠都投入了大量的人才及資源進行開發。
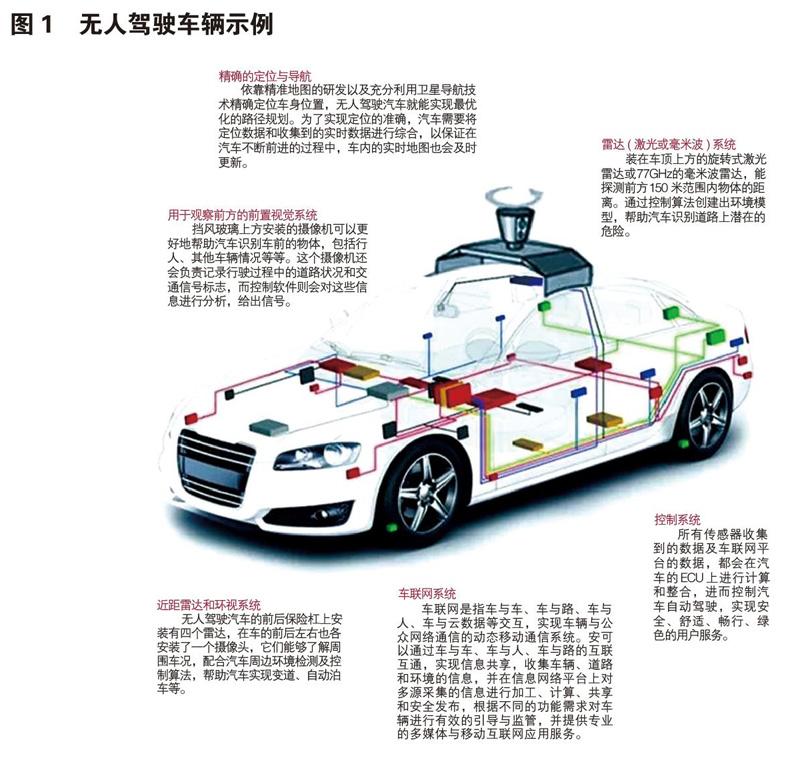
無人駕駛,是指通過給車輛裝備智能軟件和多種感應設備,包括車載傳感器、雷達、GPS以及攝像頭等,實現車輛的自主安全駕駛,安全高效地到達目的地并達到完全消除交通事故的目標。[2]無人駕駛的一大核心功能是實現汽車自動駕駛功能,能實現脫離油門踏板,以駕駛員通過上位機發出的任何期望速度行駛。并使得駕駛員能脫離轉向系統、制動系統、換擋裝置和油門踏板等,自動實現車輛的起步、換擋、加減速、停車等功能。如圖1。
鑒于傳統車在實現自動駕駛的PID模塊中,通過控制噴油量來調節車速,固然有一定的可靠性。然而出現不同工況或路況時,相同的噴油量輸出的扭矩也必然不一樣。會使得控制器缺乏精準的魯棒性和實時性。文章對于純電動車,設計一種自動駕駛控制系統,直接輸出對電機的扭矩請求值驅動車輛,具有更好的響應精度。
2 自動駕駛功能結構模塊設計
自動駕駛功能控制系統的硬件模塊主要包括:1、整車控制器(Vehicle Control Unit,簡稱VCU);2、電機控制器(Motor Control Unit,簡稱MCU);3、驅動控制器(Drive Control Unit,簡稱DCU);4、車速傳感器;5、驅動電機。
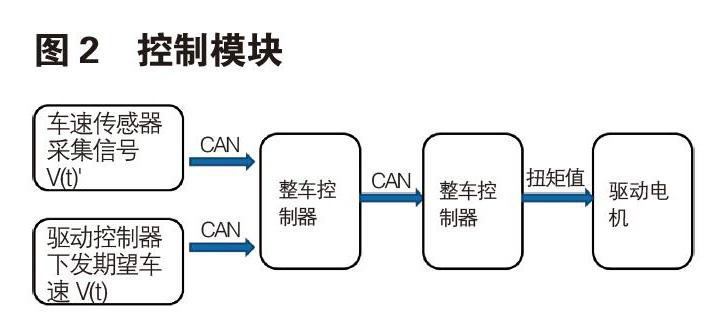
由車速傳感器采集當前的車速信號,DCU通過道路的實時工況,對整車提出相應的期望車速信號,兩者通過整車的CAN(Controller Area Network)總線傳輸給VCU。VCU采集二者信號后,通過內部的PID算法,轉化為對MCU相應的扭矩輸出請求。MCU控制電機輸出期望的扭矩值,使得車輛能實時地以DCU發出的期望車速行駛,達到自動駕駛的目的。控制模塊如圖2所示。
3 PID控制模塊設計
3.1 PID簡介
在工程實際中,應用最為廣泛的調節器控制規律為比例、積分、微分控制,簡稱PID控制,又稱PID調節。PID控制器問世至今已有近70年歷史,它以其結構簡單、穩定性好、工作可靠、調整方便而成為工業控制的主要技術之一。當被控對象的結構和參數不能完全掌握,或得不到精確的數學模型時,控制理論的其它技術難以采用時,系統控制器的結構和參數必須依靠經驗和現場調試來確定,這時應用PID控制技術最為方便。[3]
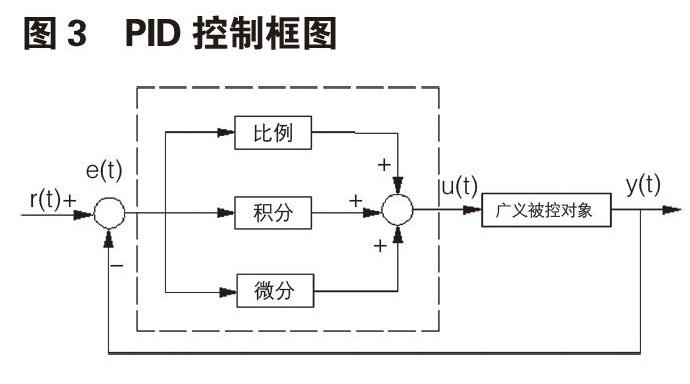
其控制框圖如圖3所示
其中,控制偏差e(t)=r(t)-y(t),比例、積分和微分的線性組合式為:
式中Kc為比例系數,T1為積分時間常數,Td為微分時間常數。理想PID控制器的傳遞函數為:
其中,
U(t):為輸出信號;
e(t):為偏差信號;
Kp:為PID參數的比例系數;
Ti:為PID參數的時間積分常數;
TD:為PID參數的微分時間常數。
PID控制主要包括三大模塊:
(1)比例P控制
比例控制是最早較為容易且普遍的工具,針對被控對象的輸出與輸入之間的差值為正比關系。即當偏差e(t)出現的時候,比例調節器通過運算控制,減小偏差的產生,使得系統穩定運行。比例控制在線性對象里占著絕大部分的比例。其中關鍵因素是比例系數Kp,一般而言,當Kp較大時,誤差會更快地減小,但是此時會引起系統的振蕩。當Kp較小時,則造成穩定調節需要很長的時間的情況。
(2)積分I控制
我們知道,比例控制難以避免穩態誤差,這時,引進了積分算法。積分的作用是對累積的偏差調整,通過內部運算控制使得偏差慢慢趨近于零。當系統運行時,積分項隨之變大,這時,即使誤差比較小,積分項也會慢慢變大,依此使輸出也慢慢變大,穩態誤差慢慢減小,直至為零。
(3)微分D控制
微分控制的功能是敏感地感知誤差變化的趨向,在偏差值要變得較大的時候,提前加入具有修正作用的調整信號,使得響應速度加快,減少調節的時間。因為系統中存在較大的滯后元件,使得變化滯后于誤差的變化。所以此時若想提高控制精度,必須使用微分控制項以及早預防誤差的出現。
3.2 自動駕駛控制策略
VCU采集當前車速V'(t),和駕駛員通過DCU控制器發出的期望速度V(t),內部通過PID算法的控制,輸出對MCU的扭矩需求Tq。MCU通過需求的扭矩輸出,電機驅動車輛以期望的速度行走。其控制框圖如圖4所示。
經實車測試后,可得出控制系統對DCU期望車速的響應圖,如圖5
由圖3可知,在城市路況低速調試中,實際車速達到期望車速的初始時段,誤差超調量為±1.5km/h。達到穩態值后,實際車速與期望車速基本一致,穩態誤差小于0.5km/h。因此,實際車速與駕駛員下發的期望車速有良好的跟隨性,且加速性良好。
4 總結
以自動駕駛為主要功能的無人駕駛,在智能和環保的潮流下,如雨后春筍般涌現。與高速環境研究相比,城市環境下的無人駕駛由于速度較慢,因此更安全可靠,應用前景更好。短期內 ,可作為城市大容量公共交通 (如地鐵等 )的一種補充,解決城市區域交通問題。在此背景下,提出在純電動車中,以PID算法控制,由車速參數直接轉化為對電機的扭矩控制,具有良好的魯棒性和實時性。實車驗證中表現出良好的響應精度,在無人駕駛市場領域具有很好的推廣性。
基金項目:廣西創新驅動發展專項資金資助項目(桂科AA18242039);柳州市科學研究與技術開發計劃資助項目(2019AD10202)
參考文獻:
[1]楊帆. 汽車的發展現狀和展望[J]. 《上海汽車》,2014(3):35-40.
[2]孫健,全興.無人駕駛汽車發展現狀及建議[J].《科技視界》,2017(6).
[3]何芝強.PID控制器參數整定方法及其應用研究[D].杭州:浙江大學.
