室內(nèi)自校準(zhǔn)導(dǎo)航定位方法
2021-04-12 02:23:20傅惠民
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新 2021年1期
傅惠民, 崔 軼
(北京航空航天大學(xué) 小樣本技術(shù)研究中心, 北京 100191)
0 引言
據(jù)統(tǒng)計,人有80%左右時間是在室內(nèi)活動[1],因此室內(nèi)導(dǎo)航定位具有廣泛的應(yīng)用前景。關(guān)于室內(nèi)定位問題,目前已經(jīng)發(fā)展了WiFi、藍(lán)牙、超寬帶、紫蜂、紅外等一系列室內(nèi)定位技術(shù),但是,在非視距環(huán)境中的定位精度還有待進(jìn)一步提高。 為此,本文提出一種室內(nèi)信號強(qiáng)度路徑損耗自校準(zhǔn)模型, 與傳統(tǒng)的因墻壁等障礙物引起的信號強(qiáng)度路徑損耗模型相比, 本文的自校準(zhǔn)模型既不需要大量試驗,而且精度還更高。 在此基礎(chǔ)上,建立了距離量測方程,給出一種基于接收信號強(qiáng)度指示(RSSI)的室內(nèi)高精度定位方法。

關(guān)于室內(nèi)導(dǎo)航問題, 由于用于室內(nèi)導(dǎo)航的慣性導(dǎo)航系統(tǒng)往往存在較大漂移,不能很好地滿足比室外導(dǎo)航精度更高的室內(nèi)導(dǎo)航的要求。 為了解決上述問題,人們提出了行 人 航 位 推 算 方 法[2,3],其 中 最 著 名 的 是Weinberg 模 型[4],該模型以步態(tài)周期內(nèi)Z 軸加速度的極差為特征量估計步長,其具體計算公式如下:式中:L 為步長,azmax和azmin分別為步態(tài)周期內(nèi)Z 軸加速度的最大值和最小值,K 為步長參數(shù), 可以通過訓(xùn)練得到。 但是Weinberg 模型存在兩個不足,一是需要通過大量訓(xùn)練才能得到步長參數(shù)K, 這嚴(yán)重限制了它的實際使用;二是當(dāng)室內(nèi)地面不平(如上下坡或上下樓等)時,采用Z 軸加速度會導(dǎo)致步長誤差。 對此,本文提出一種新的步長估計模型,并建立一種基于RSSI 的室內(nèi)自校準(zhǔn)導(dǎo)航方法,能夠通過自校準(zhǔn)濾波對步長參數(shù)進(jìn)行實時估計,解決了傳統(tǒng)方法需通過大量訓(xùn)練來確定參數(shù)的問題。
1 室內(nèi)信號強(qiáng)度路徑損耗自校準(zhǔn)模型及方法
1.1 自校準(zhǔn)模型
設(shè)在位置(x,y)處能夠接收到n 個信號,其信號強(qiáng)度與距離之間的關(guān)系可用式(2)描述:

式中,Si為第i 個熱點(AP)在距離ri處的信號強(qiáng)度,r0i為參考距離,S0i為參考距離處的信號強(qiáng)度,ηi為信號強(qiáng)度的路徑損耗系數(shù),在不同建筑物中有不同的取值,νsi為零均值的正態(tài)隨機(jī)變量,即νsi~N(0,2σsi),dsi為因墻壁等障礙物引起的信號損耗而帶來的未知輸入 (未知的系統(tǒng)誤差)。設(shè)前n0(n0≥3) 個信號是在視距環(huán)境中傳播, 此時可取dsi=0,i=1,2, …,n0; 后n-n0個信號是在非視距環(huán)境中傳播,如需穿過墻壁等障礙物,此時dsi一般不為零。
1.2 自校準(zhǔn)方法
下面給出室內(nèi)信號強(qiáng)度路徑損耗自校準(zhǔn)模型式(2)中未知輸入dsi的自校準(zhǔn)估計方法。 設(shè)第i 個AP 的位置坐標(biāo)為(Xi,Yi),i=1,2,…,n,則有

實際工作中, 當(dāng)不知道哪些信號是在視距環(huán)境中傳播,哪些是在非視距環(huán)境中傳播時,通常可將信號強(qiáng)度最大的前三個信號看作是在視距環(huán)境中傳播。




傳統(tǒng)的因墻壁等障礙物引起的信號強(qiáng)度路徑損耗模型比較復(fù)雜,其參數(shù)確定需要進(jìn)行大量試驗,而且精度也遠(yuǎn)沒有式(2)的信號強(qiáng)度路徑損耗自校準(zhǔn)模型高。
2 基于RSSI 的室內(nèi)自校準(zhǔn)定位方法
2.1 距離量測方程
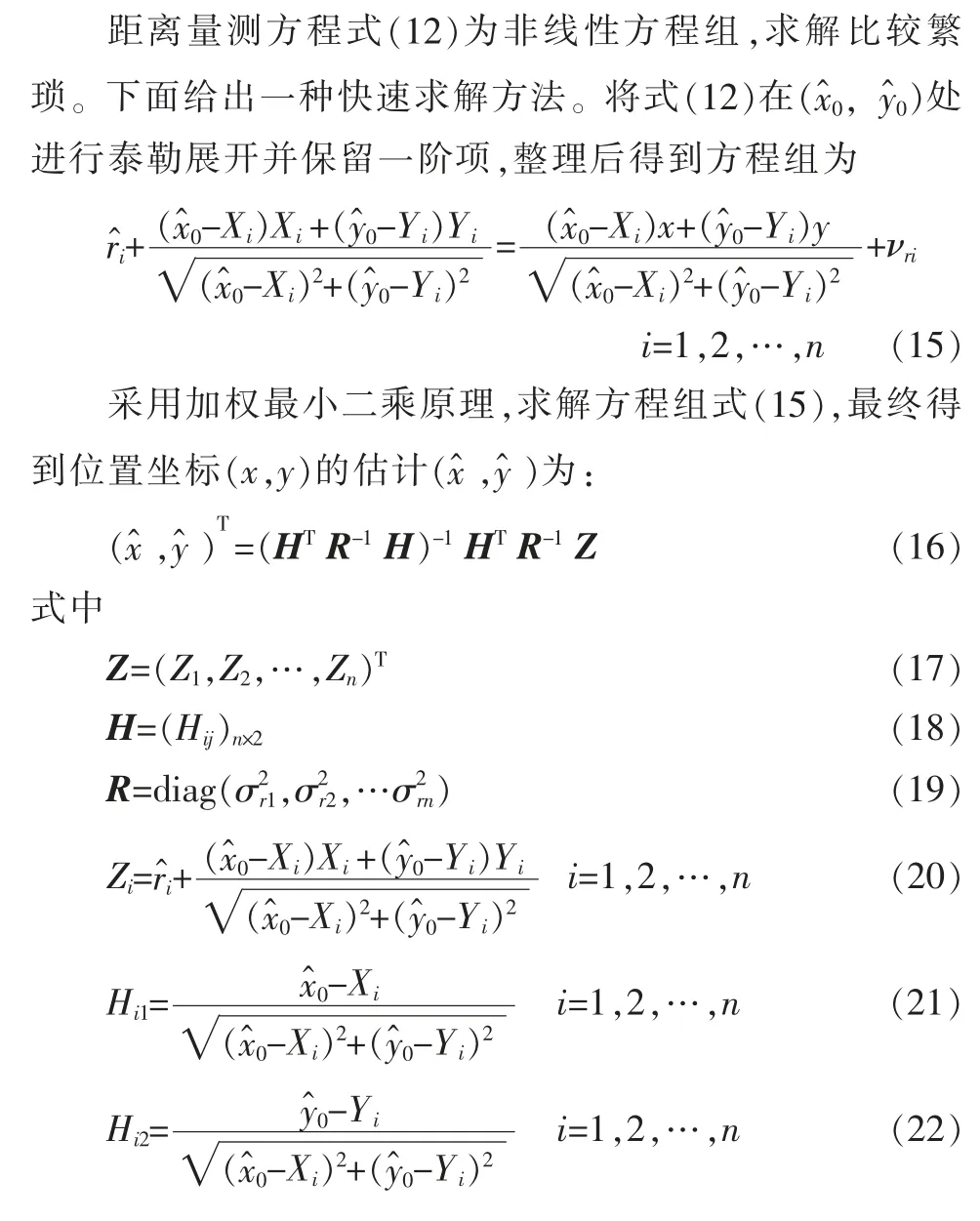
由式(2)可知,距離越遠(yuǎn),距離估計值的分散性就越大,因此建立距離量測方程為

距離量測方程式(12)考慮了測量的隨機(jī)性,所以能夠比傳統(tǒng)的距離方程更好地描述實際情況。
2.2 距離量測方程快速求解方法
3 新步長模型及行人航位自校準(zhǔn)推算方法
3.1 一種新的步長估計模型
當(dāng)室內(nèi)地面不平(如上下坡或上下樓等)時,通過式(1)估計步長往往會產(chǎn)生較大的誤差。 為此,本文提出一種新的步長估計模型:

式中:L 為步長,axmax和axmin分別為步態(tài)周期內(nèi)X 軸加速度的最大值和最小值,aymax和aymin分別為步態(tài)周期內(nèi)Y軸加速度的最大值和最小值,K 為步長參數(shù),可以通過訓(xùn)練得到,也可以通過自校準(zhǔn)濾波實時估計。
由于式(23)所示的步長估計模型是以水平方向加速度的極差為特征量,并未用到豎直方向的加速度,所以其不受路面坡度的影響, 能夠在行人上下坡或上下樓時依然保持高精度的步長估計。
3.2 基于新步長模型的行人航位自校準(zhǔn)推算方法
下面基于新的步長估計模型, 采用慣性傳感器中陀螺儀和加速度計的量測數(shù)據(jù), 給出一種行人航位自校準(zhǔn)推算方法, 這里的自校準(zhǔn)主要是對陀螺儀和加速度計的漂移進(jìn)行校準(zhǔn)。
首先,由式(24)計算總加速度:

式 中,acx,k,acy,k,acz,k為 第k 次 采 樣 時 加 速 度 計 的 量 測 數(shù)據(jù),ac,k為相應(yīng)的總加速度。
實時對總加速度進(jìn)行探測, 每探測到總加速度出現(xiàn)一個波峰,就代表行人邁出了一步。 同時,為了剔除偽波峰,設(shè)定如下兩個閾值:

式中:a*為總加速度閾值,tc,k為第k 次采樣距上一個總加速度波峰(真波峰)的時間間隔,t*為時間間隔閾值。 只有同時滿足式(25)和式(26)的總加速度波峰,才被認(rèn)為是真波峰。
與此同時,根據(jù)慣性導(dǎo)航方程,并通過對陀螺儀和加速度計量測數(shù)據(jù)進(jìn)行自校準(zhǔn)濾波處理, 實時計算行人的航向角。 濾波的狀態(tài)方程如下式所示:
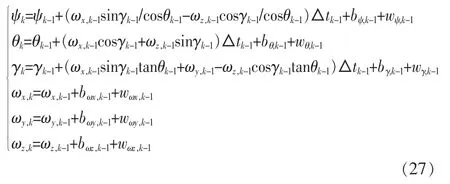
式中:ψk為航向角,θk為俯仰角,γk為滾轉(zhuǎn)角,ωx,k,ωy,k,ωz,k為載體坐標(biāo)系下的三軸角速度,△tk-1是相鄰兩次采樣的時 間 間 隔,wψ,k-1,wθ,k-1,wγ,k-1,wωx,k-1,wωy,k-1,wωz,k-1為 狀 態(tài) 噪聲,bψ,k-1,bθ,k-1,bγ,k-1,bωx,k-1,bωy,k-1,bωz,k-1為狀 態(tài)方 程 中的 未知輸入。
濾波的量測方程由式(28)給出:
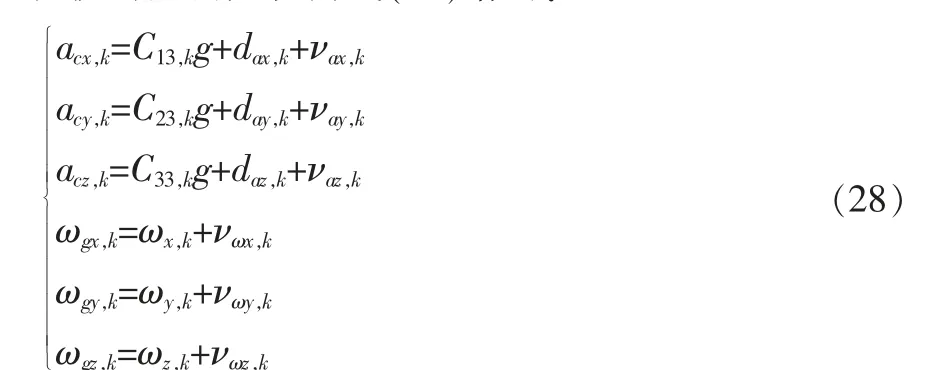
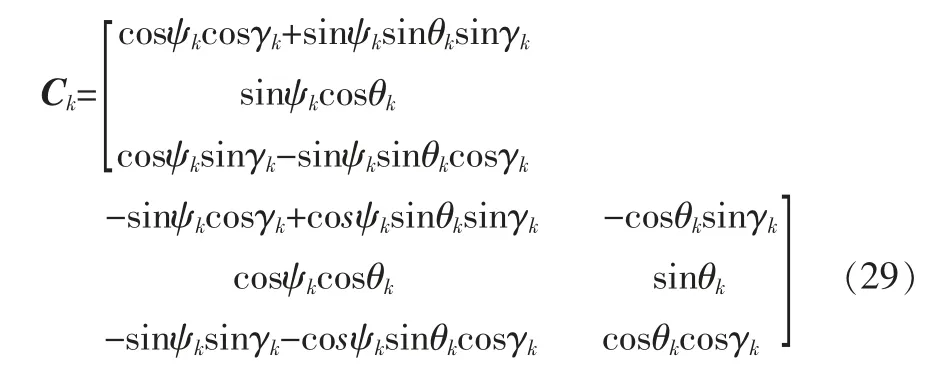
式中:ωgx,k,ωgy,k,ωgz,k為第k 次采樣時陀螺儀的量測數(shù)據(jù),νax,k,νay,k,νaz,k,νωx,k,νωy,k,νωz,k為量測噪聲,dax,k,day,k,daz,k為量測方程中的未知輸入,g 為當(dāng)?shù)氐闹亓铀俣龋珻ij,k為Ck矩陣第i 行第j 列的元素,Ck矩陣由式(29)計算。
采用文獻(xiàn)[5]中的非線性系統(tǒng)雙未知輸入自校準(zhǔn)濾波方法進(jìn)行濾波, 也可以采用其中的兩步自校準(zhǔn)濾波方法來進(jìn)一步提高濾波的魯棒性和精度。第k 步濾波完成后,再由式(30)和式(31)計算水平方向的加速度。

當(dāng)探測到行人邁出了一步時,即可由式(23)計算該步步長,進(jìn)而由式(32)和式(33)估計行人所處的位置。

式中:(xj,yj)為第j 步終點的位置坐標(biāo),Lj為第j 步步長,ψj為第j 步內(nèi)航向角的平均值。
4 基于RSSI 的室內(nèi)自校準(zhǔn)導(dǎo)航方法
下面將行人航位自校準(zhǔn)推算和室內(nèi)信號強(qiáng)度路徑損耗自校準(zhǔn)模型相結(jié)合,建立一種基于RSSI 的室內(nèi)自校準(zhǔn)導(dǎo)航方法,以進(jìn)一步提高導(dǎo)航精度。
首先,由行人航位自校準(zhǔn)推算式(32)和式(33),可得到基于RSSI 的室內(nèi)自校準(zhǔn)導(dǎo)航的狀態(tài)方程為:

式中:Si,j為在第j 步終點(xj,yj)處來自第i 個AP 的信號強(qiáng)度,dsi,j為量測方程中的未知輸入,νsi,j為量測噪聲。 當(dāng)?shù)趇 個AP 發(fā)出的信號在視距環(huán)境中傳播時,直接令dsi,j=0,且這樣的AP 不少于2 個。
最后,采用文獻(xiàn)[5]中的非線性系統(tǒng)雙未知輸入自校準(zhǔn)濾波方法對式(34)和式(36)進(jìn)行導(dǎo)航濾波。 其中自校準(zhǔn)主要是對步長模型式(23)中的參數(shù)即式(34)中的Kj-1和式(36)中的未知輸入dsi,j進(jìn)行實時校準(zhǔn)和估計。
5 實例
現(xiàn)在北京航空航天大學(xué)新主樓20m×30m 的一個長方形走廊內(nèi)的四個角和四條邊中點布置了8 個WiFi AP。 行人手持手機(jī)沿長方形走廊行走一圈, 實時記錄陀螺儀、 加速度計數(shù)據(jù)和接收到的每個WiFi AP 的三個信號強(qiáng)度平均值。
采用本文方法(新步長模型+自校準(zhǔn)濾波)和傳統(tǒng)方法 (Weinberg 模型+擴(kuò)展卡爾曼濾波) 以及Weinberg 模型+自校準(zhǔn)濾波方法進(jìn)行計算。計算每一步終點的導(dǎo)航精度,并計算其平均值列于表1。
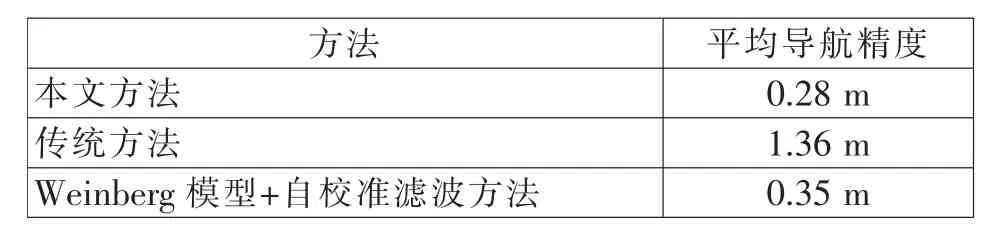
表1 平均導(dǎo)航精度比較
從表1 可以看到,本文方法的導(dǎo)航精度最高,比傳統(tǒng)方法的導(dǎo)航精度提高了3.8 倍。 本文方法的導(dǎo)航精度比Weinberg 模型+自校準(zhǔn)濾波方法的導(dǎo)航精度提高了25%,這說明本文提出的新步長模型在平地上也比Weinberg模型具有更高的精度。 此外,Weinberg 模型+自校準(zhǔn)濾波方法的導(dǎo)航精度則比傳統(tǒng)方法的導(dǎo)航精度提高了2.8倍, 這說明本文自校準(zhǔn)濾波方法能夠比傳統(tǒng)擴(kuò)展卡爾曼濾波方法顯著提高導(dǎo)航精度。
6 結(jié)論
(1)本文的室內(nèi)信號強(qiáng)度路徑損耗自校準(zhǔn)模型,能夠根據(jù)信號強(qiáng)度的量測值實時進(jìn)行自校準(zhǔn),具有精度高、實時性強(qiáng)的特點, 解決了傳統(tǒng)的因墻壁等障礙物引起的信號強(qiáng)度路徑損耗模型需要大量試驗且精度不高的問題。
(2)推導(dǎo)出距離量測方程的協(xié)方差矩陣,建立了距離量測方程,因其考慮了測量的隨機(jī)性,所以能夠比傳統(tǒng)的距離方程更加準(zhǔn)確地描述實際情況。在此基礎(chǔ)上,建立基于RSSI 的室內(nèi)自校準(zhǔn)定位方法,能夠進(jìn)行高精度定位。
(3)提出一種新的步長估計模型,它不但克服了傳統(tǒng)的Weinberg 步長估計模型因地面不平導(dǎo)致的較大步長誤差,而且在平地上也比Weinberg 模型具有更高的精度。
(4)給出行人航位自校準(zhǔn)推算方法,通過對陀螺儀和加速度計的漂移進(jìn)行自校準(zhǔn),有效地減小導(dǎo)航誤差。
(5)建立基于RSSI 的室內(nèi)自校準(zhǔn)導(dǎo)航方法,通過將行人航位自校準(zhǔn)推算和RSSI 自校準(zhǔn)模型有機(jī)相結(jié)合,并通過自校準(zhǔn)濾波對步長參數(shù)實時估計, 解決了傳統(tǒng)方法需大量訓(xùn)練來確定參數(shù)的問題,顯著提高導(dǎo)航精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56