長航時輕型固定翼農用遙感無人機設計與仿真
2021-04-13 09:26:00蘭玉彬李珂宇
農業機械學報 2021年3期
關鍵詞:質量
朱 航 王 月 蘭玉彬 張 萃 李珂宇
(1.吉林大學機械與航空航天工程學院,長春 130025; 2.數控裝備可靠性教育部重點實驗室,長春 130025;3.國家精準農業航空施藥技術國際聯合研究中心,廣州 510642)
0 引言
我國是農業大國,無人機遙感技術在農業監測中發揮了至關重要的作用[1]。遙感技術受分辨率、時間周期、地理、空域和氣象條件等限制,作業成本高,在農業監測中具有很大的局限性[2-3]。采用小型無人機遙感信息平臺獲取信息,具有運行成本低、靈活性高以及獲取數據實時快速等特點,是目前監測、快速獲取農田信息的主要方法之一[4-6]。
小型無人機包括小型固定翼無人機、直升機和總質量在5 kg以下的多旋翼無人機[7]。無人機多采用電力驅動,也有少數無人機采用油動的方式[8]。相比于油動無人機,電動無人機體積小巧、成本較低、場地適應能力強,是遙感無人機發展的主流方向。
近年來,國外對農用遙感無人機的研究較多。德國MikroKopter公司開發的OktoKopter XL型電動八旋翼無人機可搭載2.5 kg光學載荷,續航時間最長可達到30 min[9]。Draganfly創新公司開發的Draganflyer X6型電動三軸六旋翼無人機的自身質量為1 kg,最大負載可達500 g,續航時間20 min[10]。瑞士SenseFly公司開發的EBEE型電動固定翼無人機采用翼身融合式布局,起飛質量700 g,續航時間可達到50 min[11]。美國ReadyMadeRC公司開發的Anaconda型電動固定翼無人機采用雙尾撐V型尾翼的構型,最大負載4 kg,續航時間最長可達到45 min[12]。德國MAVinci公司開發的Sirius I型電動固定翼無人機采用常規式布局,自身質量2.3 kg,最大負載550 g,并巡航飛行40 min[13]。在國內,深圳大疆科技創新公司開發的Spreading Wing S1000+型電動八旋翼無人機有效載荷可達3 kg,續航時間為15 min[14]。張立元[15]設計的六旋翼電動無人機起飛質量4.5 kg,綜合飛行時間可達19.2 min。楊貴軍等[16]利用多旋翼無人機平臺監測小麥育種信息,無人機有效載荷3.5 kg,續航時間15 min。盡管國內外研究者對小型遙感無人機進行了大量研究,但是載荷能力和續航時間等問題仍是小型電動遙感無人機目前急需解決的重點問題[17-19]。
國內目前對固定翼遙感無人機的研究還較少。相比于多旋翼無人機,固定翼無人機擁有更長的續航時間、更強的載荷能力和更優的飛行效率[20],可以大大提高作業效率,節省時間成本。固定翼無人機氣動布局影響其升阻比,進而影響無人機續航時間[21-22],翼身融合布局結構的固定翼無人機的升阻比高、整體質量小,續航時間更長[23],非常適合應用于農業遙感監測和軍事偵察等領域。
為了解決電動無人機續航時間短的問題,本文結合農業遙感監測需求,設計一款翼身融合布局的電動輕型固定翼無人機,提出一種電動輕型固定翼無人機設計方法,并優化設計參數、分析仿真結果,旨在突破電動輕型固定翼無人機載荷與動力系統最優匹配和飛行穩定性等技術難點,為電動固定翼遙感無人機在農業領域的應用提供理論和技術支撐。
1 總體設計
根據農業遙感監測需求,電動輕型固定翼遙感無人機主要設計目標為:翼展小于1 m,采用電力驅動,搭載RedEdge-MX型多光譜相機,質量232 g,工作高度120 m時地物分辨率為8 cm,續航時間60 min,采用手拋式起飛,滑行降落。
1.1 設計參數確定
1.1.1起飛質量
質量分析是無人機性能分析的基礎,無人機起飛質量計算式為[24]
WT=W1+W2+W3+W4
(1)
式中WT——飛機起飛質量
W1——結構質量
W2——動力裝置質量
W3——電池質量
W4——機載電子與任務設備質量
機身材料使用EPP泡沫(發泡聚丙烯),EPP材料密度小、抗震抗壓、耐腐蝕性強,非常適合用作輕型固定翼無人機機體的材料,密度為31 kg/m3,無人機體積為0.005 m3,得到結構質量W1為0.2 kg。動力裝置使用朗宇2212 KV2450型無刷電機,質量57 g,使用40 A電子調速器,質量39 g,槳葉使用6040槳,舵機質量為12 g,包括舵機拉桿等結構,W2定為0.2 kg。電池選用鋰聚合電池(3S,11.1 V),容量為3 300 mA·h的鋰電池,W3為0.3 kg。機載電子與任務設備包括飛控和攝像頭等,W4為0.8 kg。整機起飛質量WT定為1.5 kg。
1.1.2整機參考面積與翼載荷
對于普通固定翼無人機,翼載荷(飛機質量W除以整機參考面積S)一般為35~100 g/dm2[25],經過計算,滿足起飛質量的參考面積為0.15~0.43 m2。本文參考面積選用除翼尖小翼外的全部投影面積,整機參考面積確定為0.22 m2,翼載荷為68 g/dm2。
1.1.3整機展弦比
較大的展弦比能降低翼尖渦產生的誘導阻力,增加升力曲線斜率,延長續航時間,但是過大的展弦比也會增加機翼的質量,增大彎矩,導致機翼變形,較小的展弦比使得結構緊湊,展弦比計算式為
(2)
式中b——機翼平均幾何弦長
l——機翼展長
整機參考面積為0.22 m2,根據設計要求翼展長確定為0.9 m,展弦比λ=3.68。
1.1.4其他參數
對于低速飛機,后掠角可調節飛機重心位置以及改善飛機穩定性。初定前緣后掠角為30°,后緣后掠角為17°。翼尖小翼采用上小翼的形式。機翼扭轉一定角度可以防止大攻角下的翼尖失速,改善機翼上的升力分布與巡航特性,為了簡化制造工藝,取0°扭轉。機翼安裝角和上反角參考閔山山[26]所設計的翼身融合布局無人機,選取為0°。
1.2 幾何模型建立
根據設計參數,將無人機平面形狀劃分為4個部件,分別為機身、內翼、外翼和翼尖小翼,外翼上設有副翼,如圖1所示。利用三維建模軟件CATIA,根據以上設計的各個參數建立無人機幾何模型,如圖2所示,整個模型長900 mm,寬520 mm,高110 mm。
1.3 飛行控制系統設計
飛行控制系統在無人機系統中起著關鍵作用,相當于無人機的大腦,進行決策和控制。飛行控制系統主要包括:主控制器、位姿估計模塊、動力模塊、通信模塊和電源模塊,結構框架如圖3所示。本研究采用的動力模塊包括1個電機和2個舵機,電機給尾部螺旋槳提供動力,2個舵機分別控制左右副翼,實現滾轉和俯仰運動。電機輸出巡航階段螺旋槳所需轉速,用于更精確的CFD仿真。
2 仿真計算
針對無人機的氣動外形,基于ANSYS 15.0軟件中Fluent模塊利用CFD計算其氣動特性,通過ANSYS 15.0軟件中的流固耦合模塊分析其受應力、應變情況。
2.1 CFD仿真
2.1.1三維網格劃分
劃分網格的目的是將流場區域離散化,將實際流場的物理域轉換為形狀便于計算的計算域,網格劃分占據CFD周期60%~80%的時間,并且計算結果的精度和網格質量密切相關[27]。本文選取的計算域如圖4所示,采用非結構網格,創建的網格數量為210萬,內流域中旋轉域單元尺寸采用4×10-3m,無人機表面邊界層第1層厚度取2×10-5m,內流域尺寸最小為2×10-3m,外流域尺寸最小為0.1 m,生長率采用1.1,無人機劃分的網格如圖5所示。
劃分的網格傾斜度為0.23,正交質量為0.85,網格傾斜度在0~0.25之間,正交質量在0.7~0.95之間,表示網格質量良好。
2.1.2邊界條件和參數設置
對外流場進行數值模擬仿真時,利用有限體積法求解N-S方程計算空氣動力學[28],在穩態計算模式下,選擇SSTk-ω湍流模型[29-30]作為流體區域模型,其運輸方程為
(3)

(4)
式中k——湍動能ω——比耗散率
ρ——空氣密度
i、j——三維空間的自由度,取1、2、3
Gk——湍流動能
Gω——比耗散生成項
Dω——正交發散項
Γk、Γω——擴散率
Sk、Sω——用戶自定義的源項
ui——流體流動速度
Yk、Yω——發散項
由于在標準大氣壓和正常溫度下的空氣密度變化量小于5%,并且空速不大,遠小于0.3Ma,故將其視作不可壓縮氣體,并且考慮空氣重力,選用基于壓力的求解器類型,材料選用不可壓縮氣體,空氣密度ρ=1.225 kg/m3,大氣壓為101.325 kPa,空氣粘性系數μ=1.789 4×10-5Pa/s,溫度為288.15 K。入口選用速度入口,速度為30 m/s,出口選用壓力出口,上下面和飛機表面選用無滑移壁面,雷諾數Re約為4×105,槳葉旋轉體的轉速定為滿足巡航要求時的10 000 r/min。求解算法為收斂速度快的SIMPLEC算法,根據無人機飛行過程中迎角的變化,計算迎角為0°~20°中的11個工況。
2.2 流固耦合
流固耦合分為直接耦合、單向流固耦合和雙向流固耦合[31]。單向流固耦合過程簡單,穩態求解快,單向流固耦合應力比雙向流固耦合大,運算速度快,也更偏于設計安全[32],本文采用基于ANSYS的單向流固耦合。
2.2.1材料加載及網格劃分
機體材料選用EPP泡沫,螺旋槳材料選用ABS塑料,EPP[33]和ABS[34]材料特性如表1所示,在Engineering Data中定義參數后,加載到機體上。利用四面體網格劃分方法劃分網格,網格數量接近13萬。

表1 材料特性參數Tab.1 Material properties
2.2.2CFD數據導入
流固耦合面的數據通過壓力數據的形式導入靜力學分析,如圖6所示,尾部設定為固定面,計算在此氣動條件下的結構應力和變形量。
3 結果與分析
3.1 數值分析與參數優化
3.1.1模型優化
在展弦比、梢根比等參數確定的情況下,在初始模型的基礎上,對無人機機身的后掠角和翼尖小翼的類型進行改進,得到相對優化的模型,提高升阻比,提升續航性能,并得到后掠角與翼尖小翼類型對無人機氣動性能的影響。
目前已有的農用電動飛翼無人機一般采用中等后掠角[29],結合本研究采用的初始結構,后掠角范圍定為25°~40°。翼尖小翼能改善機身受到的誘導阻力,一般有上小翼、下小翼和翼梢端板3種形式。故后掠角與小翼類型各選用4個水平,如表2所示,利用CFD仿真進行16次的全面試驗。
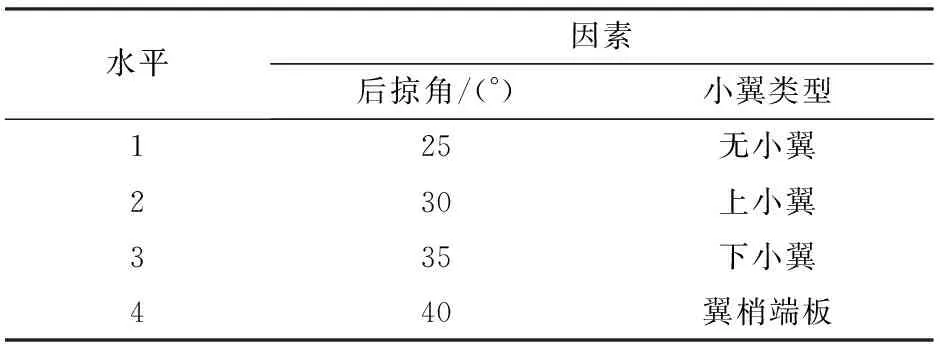
表2 因素水平Tab.2 Factors and levels
3.1.2參數優化結果分析
通過改變后掠角和翼尖小翼類型,阻力系數、升力系數和升阻比試驗結果如圖7~ 9所示。
如圖7所示,阻力系數隨著后掠角的升高大致呈下降趨勢,后掠角的增大對減小飛行過程中產生的阻力有一定的作用。后掠角一定時,無小翼類型的阻力系數最小,上小翼的阻力系數最大。 翼尖小翼結構的加入,會略微增大飛行過程中產生的阻力。
如圖8所示,升力系數隨著后掠角的增大基本呈下降趨勢,后掠角的增大使得無人機在飛行過程中產生的升力減小。后掠角一定時,無小翼類型的升力系數最小,后掠角在30°~40°之間時,翼梢端板類型的升力系數最大。翼尖小翼結構的加入,會降低飛行過程中產生的誘導阻力,提高無人機的升力。
如圖9所示,無人機的升阻比隨著后掠角的增大先升高后降低,并在35°時達到最大值。后掠角一定時,無小翼類型的升阻比最小,翼梢端板類型的升阻比最大。可以看出,采用翼尖小翼盡管會增大一部分阻力系數,但對增大整機的升阻比貢獻很大。
3.1.3最優模型
由全面試驗的結果得出,后掠角為35°,采用翼梢端板類型的無人機升阻比最大。采用此結果作為優化后的模型,升阻比較初始模型提升了2.6%。優化后的模型如圖10所示。
3.2 氣動特性
3.2.1巡航時長
選用最優模型,改變迎角,設計的翼身融合布局無人機氣動性能結果如圖11~13所示。
如圖11所示,升力系數隨迎角增大而增大,在0°~16°升力系數近似線性變化,之后斜率越來越小,在迎角為0°時升力系數最小,為0.054,在迎角為20°時升力系數最大,為1.24,并且在20°時斜率趨于0,此時已經接近失速迎角。在小于16°均可作為巡航迎角。
飛機在飛行過程中,阻力來自摩擦阻力、誘導阻力和壓差阻力,通常CFD軟件計算所得阻力系數較真實值偏大[35]。由圖12可知,阻力系數隨迎角的增大而升高,且斜率越來越大,在迎角為0°時阻力系數最小,為0.02,在迎角為20°時阻力系數已達到0.175。無人機機翼的阻力系數在小迎角時起主導作用的是摩擦阻力,小迎角下壓差阻力變化不大,在大迎角時,壓差阻力與誘導阻力迅速增大,成為主導因素,使得阻力曲線的斜率越來越大。
如圖13所示,隨著迎角的增大,升阻比先增大再減小,在迎角6°~8°之間,升阻比最大,在迎角為6°時,升阻比為13。
無人機工作時,電池大部分能量用于巡航狀態,在巡航狀態無人機續航時間與升阻比有關,升阻比越大,續航時間越長,巡航范圍也會提高。近似取迎角6°時為巡航迎角,在巡航時力平衡方程滿足[26]
(5)
式中G——機體重力α——迎角
L——升力D——阻力
T——電機推力v——巡航速度
CL——升力系數CD——阻力系數
由式(5)可得無人機在迎角為6°時的巡航速度為15.5 m/s。對于電動無人機,其續航時間計算式為[36]
(6)
式中Qdc——電池儲存能量
ηm——巡航狀態電機效率
ηprop——螺旋槳效率
ηε——電子調速器效率
g——重力加速度
本研究動力系統所選取的電池電壓為11.1 V,3 300 mA·h鋰電池,電機效率ηm為0.8,螺旋槳效率ηprop為0.7,電子調速器效率ηε為0.95。因此,計算得到在此巡航狀態下無人機飛行時間t為65 min,滿足長航時設計要求。
3.2.2巡航狀態氣動特性分析
在迎角為6°、空速為15.5 m/s(巡航狀態)條件下,無人機上下表面壓力云圖如圖14所示,顯示的壓力范圍為機身的壓力范圍。
由圖14可知,無人機整體壓力分布合理,壓力最大值在機翼的前緣部分,為143 Pa,下表面壓力普遍大于上表面,從而形成升力。同時上表面壓力最小處在機翼前緣部分,上下壓差的較大值也普遍集中在機翼前緣部分,說明升力主要來自于機翼前半段,后半段對升力貢獻較小,符合一般規律。沿翼展方向截取離對稱面100、200、280、350、420 mm處的翼剖面,測量5個部分機體表面的壓力系數分布,圖15為初始模型和優化模型這5個部分機體表面壓力系數分布圖。
如圖15所示,機翼下表面壓力系數基本大于上表面壓力系數,并且在前緣部分上下表面的壓力系數差值大于后緣部分,說明升力主要集中在機翼前緣部分。y=100 mm處為內翼壓力系數分布,其余部分為外翼壓力系數分布,機身由于需要給機載電子與任務設備提供足夠的空間,獨特的氣動外形也使得提供的升力較小,內翼和外翼提供了大部分升力。通過初始模型與優化模型的壓力系數對比,靠近機身的部分壓力分布近似相同,在靠近翼梢的部分,優化方案的壓力系數分布優于初始方案。說明改進后掠角和翼尖小翼類型對固定翼的影響主要集中在翼梢部分。
3.3 受力變形
在迎角為6°、空速為15.5 m/s(巡航狀態)條件下,通過單向流固耦合,得到的總變形量和應力如圖16所示。
如圖16a所示,總變形量基本分布在機翼上,越靠近翼梢總變形量越大,最大值為0.288 38 mm,分布在翼梢的位置上,機身與槳葉的總變形量相對很小,總的來說,在巡航狀態的氣動載荷導致的總變形量很小,符合正常工作條件。由圖16b可知,機身上的應力主要分布在機翼上,最大值分布在翼根處,為0.08 MPa,故無人機在巡航狀態時,機翼承受了主要的升力,使得應力主要集中在機翼翼根的部分,EPP材料在成型條件合適時,拉伸強度最大能達到1.9 MPa[37],機身能承受在此巡航狀態的氣動載荷。槳葉上的應力能達到6.251 8 MPa,遠小于螺旋槳的彎曲屈服強度70 MPa[34]。該無人機結構的強度和剛度均滿足設計和遙感領域使用要求。
4 結論
(1)通過改進后掠角和翼尖小翼類型對初始模型進行參數優化,獲得后掠角與翼尖小翼類型對整機阻力系數、升力系數和升阻比的影響規律,優化后升阻比提高了2.6%。
(2)機體壓力分布合理,機身下表面壓力普遍大于上表面壓力,升力主要集中在機翼前緣部分,在巡航階段無人機機翼下表面壓力最大,為143 Pa。
(3)所設計的農用遙感無人機擁有良好的氣動性能,升阻比最大可達13。在起飛質量為1.5 kg、迎角為6°、巡航速度為15.5 m/s時,數值分析計算所得續航時間為65 min,滿足農業遙感監測中長航時、無人機載荷與動力系統最優匹配的設計要求。
(4)在巡航階段,機身氣動載荷下的應力最大值為0.08 MPa,小于材料的拉伸強度1.9 MPa,槳葉上應力最大為6.251 8 MPa,遠小于材料的屈服強度70 MPa,總變形量最大為0.288 38 mm,不會影響正常工作。在巡航階段該無人機結構和選用的材料均能滿足設計和使用要求。
猜你喜歡
中學生數理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(2018年6期)2018-04-22 03:16:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54
