一種新型肌腱-連桿雙模態靈巧手指的設計與分析*
2021-04-13 03:06:36方開心石萍汪志航王晴晴喻洪流
生物醫學工程研究 2021年1期
關鍵詞:分析
方開心,石萍,汪志航,王晴晴,喻洪流
(上海理工大學康復工程與技術研究所,上海 200093)
1 引 言
手的高度靈活性使人們能夠完成各種復雜的動作,其功能的缺失給患者帶來諸多不便。為提高截肢患者的生活質量,國內外一直致力于研究仿生手的機械設計[1-3]。國外的典型代表為Michelangelo、i-Limb、Bebionic假手[4]。Michelangdlo假手使用兩個肌電傳感器捕獲前臂肌電信號進行假手控制,特殊的手指對齊方式配合拇指能實現七種抓握模式,腕部屈伸功能可鎖定在八個不同位置角度[5];i-Limb假手使用兩個電極進行控制信號的采集,每個手指由驅動器進行控制,可實現五指單獨的屈曲伸展運動[6];Bebionic假手中采用直流電機絲桿并結合連桿實現四指的傳動控制,拇指采用電機齒輪傳動實現假手6自由度11關節的運動[7]。上海交通大學研制的一種五指仿生假手采用連續體差速機構,可實現簡單的手指彎曲伸展以及聯合運動[8],華中科技大學采用欠驅動方式,使用4個電機控制五根手指完成簡單的抓握功能[9],哈爾濱工業大學研制了四代假手[10-11],其中的第三代假手采用欠驅動連桿傳動方式,具備大拇指和食指的自適應抓取功能,第四代假手的手指可進行單獨驅動并使用特殊的連桿機構實現五指的耦合運動。
上述仿生假手能夠實現手部的抓握功能,但均未充分考慮設計手指的內收外展功能,且剛性結構造成假手柔順性不足[12]。本研究依照仿生學并結合人手特點,設計了一種新型欠驅動仿生靈巧手,它不僅能實現常規的包絡抓取,而且能夠實現指尖抓取和指側間抓取,具有高度的仿生性以及靈活性。該仿生手的手指結構采用單驅動方式實現手指的掌指關節、中指關節和遠指關節的耦合運動,與傳統電機加連桿、電機加齒輪傳動方式不同,本研究設計的仿生手采用舵機加腱繩和連桿雙模態傳動方式,使結構設計得更加緊湊。
2 手指結構設計
本研究基于仿生學理念,參照人手國標尺寸設計了手指結構,包括食指、中指、無名指、小指和拇指。每個手指均由舵機加腱繩進行單獨驅動,實現其屈曲伸展運動;在四指的掌指關節處采用欠驅動原理創新性設計了一種四連桿機構,由一個舵機驅動,可實現仿生手四指的內收外展功能。整體具有高度的仿生性和靈活性。
2.1 屈曲伸展結構設計
手指的外形是參照人手的結構參數進行設計,五指的傳動方式均由舵機加腱繩進行控制。本研究以食指的相關結構為例,見圖1。為降低控制的復雜性,假手的近指關節(PIP)、遠指關節(DIP)和掌骨關節(MCP)設計成耦合運動,為增加手指的靈活性,在手指的每個掌指關節處增加了內收外展的自由度,單個手指總共具有4個自由度,可聯合實現包絡抓取,指尖抓取和指側間抓取功能。
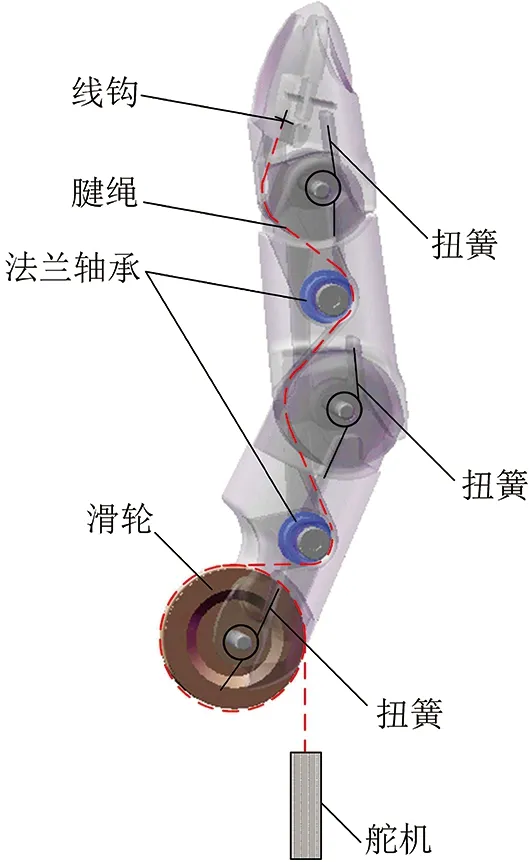
圖1 食指結構Fig.1 The structure of the index finger
由肌腱傳動原則,仿生手的四指利用腱繩和滑輪完成相互運動間的傳遞。在DIP和PIP處設計有微型法蘭軸承,在MCP處設計有滑輪,每個手指由3個部件組成,每個部件內部均設計有線道,手指指尖均設計有線鉤,腱繩通過線道在法蘭軸承和滑輪之間進行擺布并纏繞在線鉤上。DIP、PIP和MCP關節處均安裝有扭簧用于實現各關節的屈曲和伸展動作,單個手指是由一個舵機驅動PIP,并同時帶動DIP和MCP的串聯機構。
2.2 內收外展結構設計
人手的真實活動中,每根手指均可進行單獨的內收外展運動,但在抓取物體時,五根手指會以一定的協同運動[13]形成特定的抓取姿勢,而非單獨運動。本研究中四連桿機構采用欠驅動設計理念,使用一個舵機使仿生手四指同時做內收外展運動,其運動簡圖見圖2。

圖2 運動簡圖Fig.2 The diagram of the movement
驅動舵機固定在手掌內蓋上,舵盤與舵機上的齒輪固連,舵盤、連桿1、連桿2、連桿3之間鉸接,其中連桿3與手掌內蓋鉸接,以維持整個連桿的相對位置;連桿1的另一端與小指掌骨關節鉸接,連桿4的兩端分別于連桿3和食指的掌骨關節鉸接,通過驅動舵機可帶動食指和小指產生相對轉動;連桿5的兩端與小指和無名指的掌骨關節鉸接,可通過小指掌骨關節的轉動帶動無名指掌骨關節的轉動。
3 結構建模及運動學分析
為簡化仿生手的運動學分析,本研究提出了一種分離合成式機器人運動學分析方法,即對仿生手的屈曲伸展運動和內收外展運動進行單獨分析,其最終運動軌跡應是兩種運動分析結果的合成。
3.1 結構建模及參數設計
為了給假手零件開發和運動學分析作基礎,本研究建立了手部結構的三維模型,見圖1、圖3。
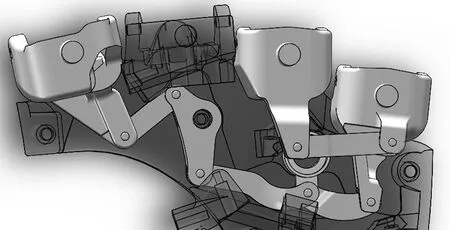
圖3 四連桿三維模型Fig.3 3D model of the four-link
手指各參數按中國成年人人體尺寸標準設計,手指各關節彎曲角度在80°~100°[14],以食指為例,其結構參數見表1。
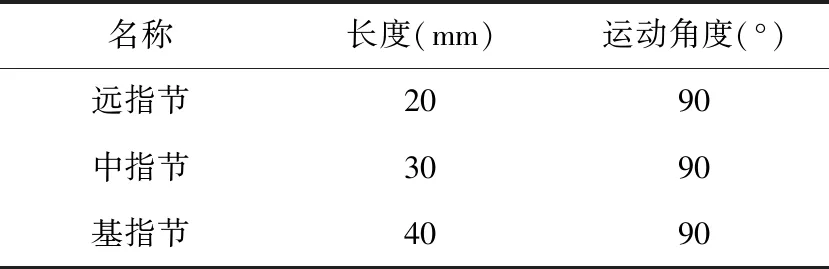
表1 食指參數Table 1 The parameters of the index finger
手指內收外展的角度范圍一般在30°~40°之間,根據此范圍進行四連桿尺寸的設計見表2。

表2 連桿尺寸參數Table 2 The parameters of the four-link
3.2 屈曲伸展運動學分析
D-H表示法是機器人運動學分析中比較常用的方法,其可以分析出關節活動角度與末端執行器之間的關系。手指整體是一個串聯結構,采用D-H建模分析方法可以求出每個手指指尖相對于掌指關節基坐標系的空間位姿關系[15],本研究以食指為例進行分析,建立其D-H坐標系,見圖4(圖中z軸均垂直紙面向外)。

圖4 食指D-H坐標系Fig.4 D-H coordinate system of index finger
可采用D-H坐標法中的坐標系鏈式法則可知其基礎變換方程為:
Rot(z,θi)Trans(0,0,di-1)
(1)


(2)
式中,cθi表示cos(θi),sθi表示sin(θi),cαi-1表示cos(αi-1),sαi-1表示sin(αi-1)。
根據式(2)和表3所示連桿參數,可求得各連桿變換矩陣如下:

表3 D-H參數表Table 3 The parameters table of D-H
各連桿變換矩陣相乘,可得仿生手指的變換矩陣:
(3)
假設遠指關節相對基坐標系的矩陣為:

聯立上式可求出仿生手遠指關節的運動學基本方程:
(4)
3.3 內收外展運動學分析
本結構中每根手指的內收外展運動均采用連桿進行傳動,其運動學分析方法都是相似的,為避免繁瑣,本次運動學分析僅對食指進行較詳細的描述,其它手指采用食指的分析方法均可實現運動學的探索,運用解析法[16]建立其運動學模型,見圖5。

圖5 內收外展原理Fig.5 Principle of adduction and abduction
圖5中X1、Y1、X2、Y2分別是AD兩點水平距離、AD兩點垂直距離、DG兩點水平距離、DG兩點垂直距離。圖5中各參數含義見表5。

表5 連桿參數含義Table 5 Connecting rod parameter meaning
食指運動簡圖為一個平面五桿的運動簡圖,通過舵盤AB的順時針或逆時針旋轉,經其他桿件傳遞動力,實現食指GF的內收外展功能。根據解析法可知,桿AB、BC、CD、DP構成一個封閉的矢量多邊形ABCDPA;桿DE、EF、FG、GD構成矢量多邊形DEFGQ。其矢量表達式如下,并將其按復數矢量法展開:
在ABCDPA中有:
l1+l2+l3=Y1+X1
(5)
即:

(6)
在DEFGQ中有:
l4+l5+l6=Y2+X2
(7)
即:
(8)
聯立上式,即得連桿的位移公式:

(9)
即可求得:
(10)
式中,η=X1-l1cosβ1,ξ=Y1+l1sinβ1,λ=X2-l4cosβ3,τ=Y2+l4sinβ3。
根據式(10)對時間t進行一次和兩次求導,即可分別得出手指運動的角速度和角速度的表達式。
4 仿真與驗證
在理論上經過上述對仿生手相關機械結構的運動分析之后,為驗證所分析模型的合理性,本研究使用ADAMS對仿生手食指結構進行了運動學仿真分析,獲得各關節運動角度范圍,然后將其代入上述分析公式并利用MATLAB編程對上述所建立的食指運動學模型進行擬合,最后與ADAMS分析結果做對比驗證其合理性。
根據表1、表2和食指運動學理論模型,使用ADAMS進行運動仿真。仿真時忽略各關節之間的摩擦效應,并在舵盤處和對應關節處施加驅動,建立的屈曲伸展仿真模型和內收外展仿真模型見圖6、圖7。

圖6 屈曲伸展仿真Fig.6 Simulation of flexion and extension

圖7 內收外展仿真Fig.7 Simulation of adduction and stretch
同時利用MATLAB進行理論求解,其仿真結果以及理論計算結果見圖8、圖9。

圖8 屈曲伸展分析Fig.8 The analysis of flexion and extension

圖9 內收外展分析Fig.9 The analysis of adduction and stretch
由圖8可知,不管是在ADAMS中還是在MATLAB中,仿生手食指的屈曲伸展運動仿真曲線和與其相對應的理論曲線基本保持一致,驗證了本研究所建立仿生手運動模型的準確性與合理性。由圖9可知,內收外展運動的仿真曲線和理論擬合曲線基本一致。同時,本研究所設計仿生手內收外展四連桿機構能使四指打開角度的運動范圍,見表6,可知其符合真實人手的運動情況。

表6 運動范圍Table 6 Range of motion
其中,λ1是小指轉動角度范圍,λ2是食指轉動角度范圍,λ3是無名指轉動角度范圍。
在ADAMS中對手指內收外展運動角速度和角加速度仿真分析,其運動曲線見圖10、圖11。
圖10和圖11的加速度和角加速度曲線均為平滑曲線,并未出現太多波動點,驗證了本研究所設計內收外展結構的運動角度隨時間的變化是比較穩定的。

圖10 角速度分析Fig.10 The analysis of angular velocity

圖11 角加速度分析Fig.11 The analysis of angular acceleration
5 結論
為解決目前仿生手結構復雜、功能單一的問題,本研究在傳統連桿和腱繩的單一傳動模式基礎上,提出了一種連桿腱繩雙模態驅動方案。在進行了理論分析、結構設計和仿真分析后得出如下結論:(1)實現了整體結構設計的輕量化和緊湊化,與傳統智能仿生手單一驅動方式相比,本研究結合了連桿傳動和腱繩傳動,充分利用了手掌的狹小空間,結構緊湊。假手整體主要部件采用高韌性樹脂3D打印制成,僅為336.5 g。(2)解決了現有仿生手內收外展功能尚未充分實現的問題。并通過仿真分析了食指、無名指和小指內收外展的運動角度范圍分別在0~25°、0~15°和0~35°。基于傳統的運動學分析方式,本研究提出了一種分離合成式運動學分析方法,簡化了分析步驟,并通過仿真驗證了其可行性。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06