基于動態(tài)云貝葉斯網(wǎng)絡(luò)的艦艇防空目標(biāo)威脅評估
2021-04-15 06:11:32李旭輝顧穎彥韓興豪
艦船電子對抗 2021年1期
關(guān)鍵詞:模型
李旭輝,顧穎彥,韓興豪
(江蘇自動化研究所,江蘇 連云港 222061)
0 引 言
隨著現(xiàn)代信息化戰(zhàn)爭中各種高精尖武器的使用,現(xiàn)代戰(zhàn)場態(tài)勢更加復(fù)雜化。指揮員需要在短時間之內(nèi)處理海量多元信息,這便對現(xiàn)代指控系統(tǒng)的智能評估提出要求。
威脅評估是艦艇作戰(zhàn)火力分配和機(jī)動指揮的前提,是艦艇作戰(zhàn)指揮中的重要一環(huán)。威脅評估[1-2]能夠根據(jù)實時態(tài)勢分析各個目標(biāo)的威脅值,并基于威脅程度對各個目標(biāo)進(jìn)行排序。目前威脅評估的主要方法有線性加權(quán)法、神經(jīng)網(wǎng)絡(luò)[3]、貝葉斯網(wǎng)絡(luò)、層次分析法、模糊理論等。文獻(xiàn)[4]提出了基于模糊分類的動態(tài)貝葉斯網(wǎng)絡(luò)模型,有效地解決了艦艇防空威脅評估問題,但是該方法在隨機(jī)性知識表達(dá)方面存在缺陷。文獻(xiàn)[5]提出了一種離散動態(tài)貝葉斯網(wǎng)絡(luò)模型,用約束最大后驗概率估計算法學(xué)習(xí)網(wǎng)絡(luò)參數(shù),能有效處理不確定對抗下的威脅評估任務(wù)。但貝葉斯網(wǎng)絡(luò)(BN)模型結(jié)構(gòu)由領(lǐng)域?qū)<抑苯犹岢觯哂休^強(qiáng)的主觀性。基于結(jié)合作戰(zhàn)數(shù)據(jù)學(xué)習(xí)和專家知識的BN結(jié)構(gòu)模型更加客觀,能夠有更強(qiáng)的模型適應(yīng)性和實用性。
基于上述思考,本文提出了一種基于結(jié)構(gòu)學(xué)習(xí)的動態(tài)云貝葉斯網(wǎng)絡(luò)的威脅評估模型,利用云模型知識表達(dá)模糊性和隨機(jī)性的特點,對連續(xù)的威脅因子進(jìn)行離散化;再采用爬山算法對貝葉斯網(wǎng)絡(luò)進(jìn)行結(jié)構(gòu)學(xué)習(xí),綜合學(xué)習(xí)結(jié)果和專家知識構(gòu)建模型網(wǎng)絡(luò)結(jié)構(gòu);最后使用最大似然估計算法和聯(lián)合樹算法學(xué)習(xí)網(wǎng)絡(luò)參數(shù)和推理,評估觀測目標(biāo)威脅等級的后驗分布。
1 動態(tài)云貝葉斯網(wǎng)絡(luò)
1.1 云模型
云模型是一種在定性語言和定量數(shù)值之間建立映射關(guān)系的模型[6],它可以刻化定性定量兩者之間的隨機(jī)性和模糊性,具有良好的知識表示能力。
云模型定義如下:設(shè)U是一個用精確數(shù)值表示的定量論域,C是U上表示定性的概念,若x∈U,且x是定性概念C上的一次隨機(jī)實現(xiàn),x對C的確定度μ(x)∈[0,1]是具有穩(wěn)定傾向的隨機(jī)數(shù):
μ:U→[0,1],?x∈U,x∈μ(x)
(1)
x在論域U上的分布稱為云模型,μ(x)稱為x對U的隸屬度,x稱為云滴,用drop(x,μ(x))表示。
云模型可以用期望Ex,熵En,超熵He3個數(shù)字特征來表示,即C(Ex,En,He)。期望Ex表示論域U中的隸屬度μ(x)=1的點,是論域U的中心;熵En表示云模型x不確定性的范圍,是云模型模糊性的體現(xiàn),熵越大表示云模型裕度越大;超熵He表示樣本出現(xiàn)的隨機(jī)性,用來表示熵的不確定性,超熵越大,云層越“厚”。圖1所示為Ex=10,En=5,He=0.3,云滴數(shù)N=2 000的正態(tài)云模型。
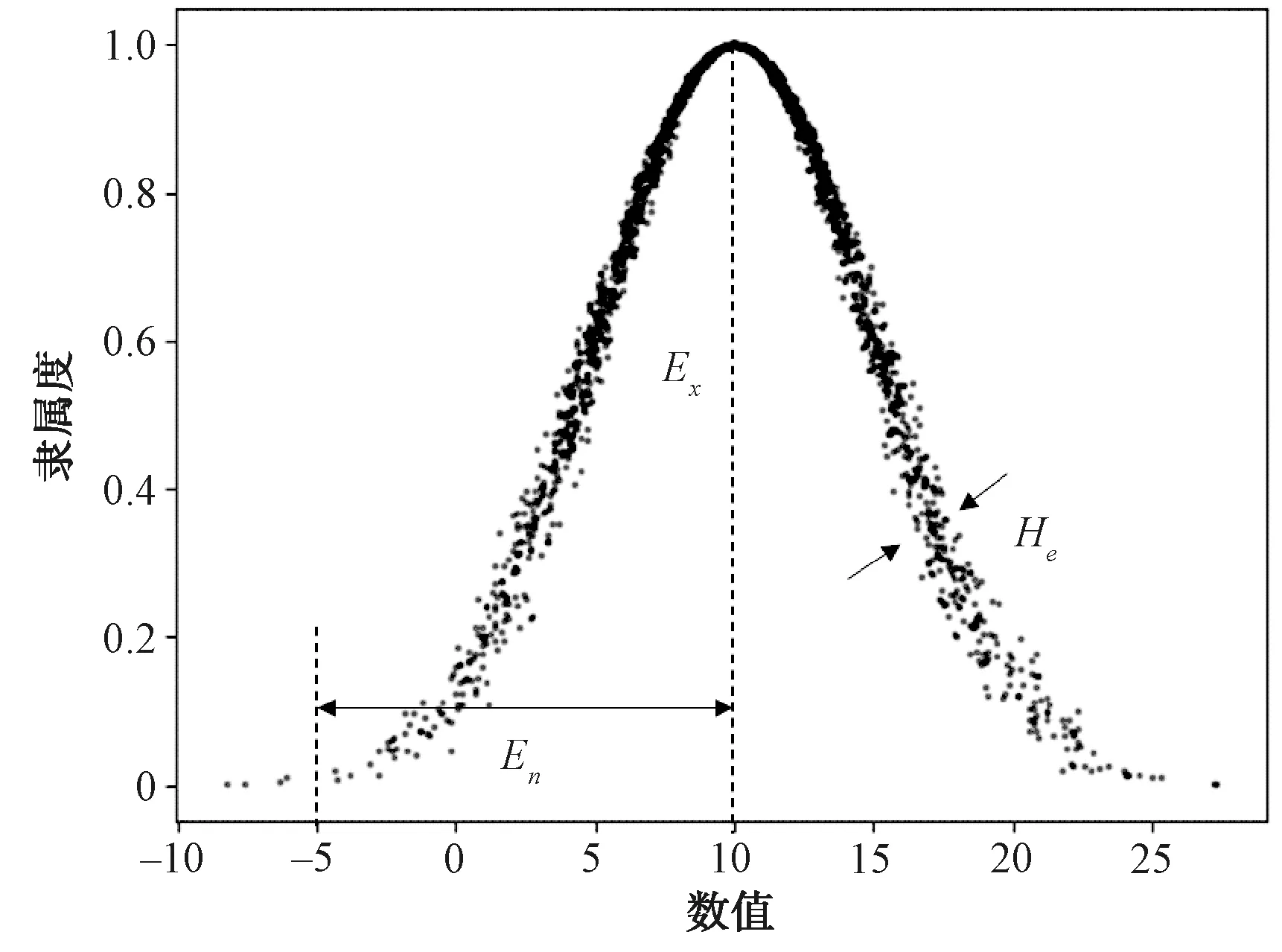
圖1 正態(tài)云模型
1.2 動態(tài)貝葉斯網(wǎng)絡(luò)
貝葉斯網(wǎng)絡(luò)(BN)是用有向圖來描述概率關(guān)系的理論。BN理論是采用概率理論在網(wǎng)絡(luò)節(jié)點上進(jìn)行推理計算,用已知的觀測節(jié)點去推算未知隱藏節(jié)點的一種方法。
動態(tài)貝葉斯網(wǎng)絡(luò)(DBN)是將靜態(tài)BN與時間信息相結(jié)合,形成具有處理時序數(shù)據(jù)的新隨機(jī)模型[7]。DBN由T個時間片的BN和時間片間的狀態(tài)轉(zhuǎn)移概率組成,模型前一時刻會對后續(xù)時刻狀態(tài)產(chǎn)生影響。在條件獨立性假設(shè)的前提下,動態(tài)貝葉斯網(wǎng)絡(luò)推理的貝葉斯公式可以表示為:
(2)
式中:n∈[1,T],表示第n個時間片;xni表示第n個時間片上的子節(jié)點;P(xn1,xn2,…,xnj)表示子節(jié)點的聯(lián)合概率分布;Pa(xni)表示xni的父節(jié)點集合,父節(jié)點Pa(xni)的邊緣分布和子節(jié)點的條件概率分布P(xni|Pa(xni))通常由專家直接給出或由數(shù)據(jù)參數(shù)學(xué)習(xí)得出。
動態(tài)云貝葉斯網(wǎng)絡(luò)是將云模型和動態(tài)貝葉斯網(wǎng)絡(luò)結(jié)合,利用云模型的不確定性和隨機(jī)性特點處理實際作戰(zhàn)中的不確定連續(xù)型數(shù)據(jù),再使用動態(tài)貝葉斯網(wǎng)絡(luò)模型評估目標(biāo)威脅。
2 改進(jìn)的威脅評估模型及流程
對空中目標(biāo)進(jìn)行威脅評估是對其進(jìn)行有效火力打擊的基本前提,國內(nèi)外學(xué)者對目標(biāo)威脅評估進(jìn)行了大量研究。基于動態(tài)云貝葉斯網(wǎng)絡(luò)的威脅評估方法首先需要分析防空任務(wù)中的威脅因子,將其中連續(xù)型威脅因子進(jìn)行云模型離散化;其次結(jié)合專家知識和數(shù)據(jù),通過結(jié)構(gòu)學(xué)習(xí)算法分析態(tài)勢要素之間關(guān)聯(lián)性,確定網(wǎng)絡(luò)內(nèi)結(jié)構(gòu);然后使用最大似然估計算法計算貝葉斯網(wǎng)絡(luò)的網(wǎng)絡(luò)參數(shù);最后將觀測信息作為證據(jù)對隱藏節(jié)點進(jìn)行網(wǎng)絡(luò)推理,得到各個時刻的威脅概率分布。其具體流程如圖2所示。
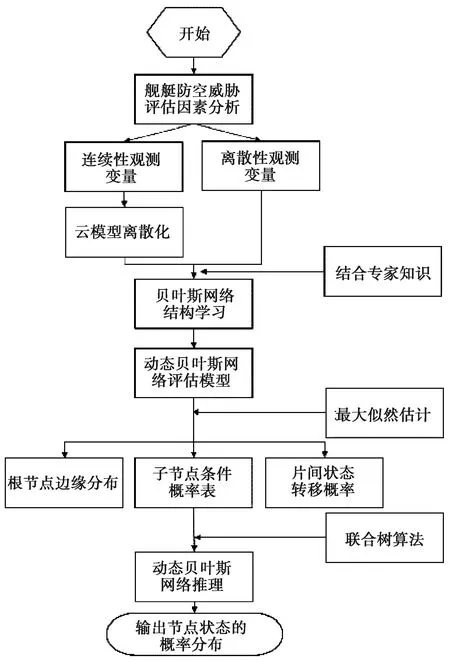
圖2 威脅評估模型流程圖
2.1 任務(wù)想定
本文考慮5種不同類型的空中目標(biāo),包括反艦導(dǎo)彈、攻擊型飛機(jī)、輔助型飛機(jī)、偵察機(jī)以及以民用飛機(jī)為主的其他無威脅型飛機(jī)。反艦導(dǎo)彈和攻擊型飛機(jī)是攜帶大殺傷力武器的空中目標(biāo),對艦艇有致命性打擊效果,毀傷效果強(qiáng),威脅等級高;輔助攻擊型飛機(jī)主要包括干擾機(jī)、預(yù)警機(jī)等,能夠干擾破壞艦艇的電子通訊設(shè)備、搜索監(jiān)視我方空中和海上目標(biāo),毀傷能力強(qiáng),且具有一定程度的威脅;偵察機(jī)主要在遠(yuǎn)距離高空中執(zhí)行偵察任務(wù),威脅等級中等;其他飛機(jī)主要包括民用飛機(jī)、民用運輸機(jī)等,不具有毀傷能力,威脅程度低。
在艦艇防空作戰(zhàn)任務(wù)中,影響目標(biāo)威脅程度的威脅因子多種多樣,結(jié)合實際作戰(zhàn)和專家知識,本文考慮的威脅等級影響因素包括目標(biāo)意圖、毀傷能力、目標(biāo)類型、航路捷徑、敵我應(yīng)答識別、目標(biāo)距離、電磁輻射、目標(biāo)高度、目標(biāo)加速度、目標(biāo)速度和雷達(dá)截面積。各個節(jié)點的狀態(tài)空間如表1所示。
在上述的節(jié)點變量中,航路捷徑、目標(biāo)距離、目標(biāo)高度、目標(biāo)加速度、目標(biāo)速度都屬于連續(xù)型變量。本文使用云模型的方法,利用云模型隨機(jī)性和不確定性的特點,對連續(xù)型變量進(jìn)行離散化處理。云模型離散化分為3步,首先確定各個連續(xù)變量劃分狀態(tài)數(shù)目N,將變量區(qū)間分為N個子區(qū)間[U1,U2,…,UN];其次確定各個區(qū)間云模型的3個數(shù)字特征Ex、En、He,生成各個狀態(tài)下的云模型[C1,C2,…,CN];最后將連續(xù)變量的數(shù)值輸入到各狀態(tài)下的云模型中,得到在各區(qū)間的隸屬度[μ1,μ2,…,μN],將隸屬度歸一化后得到各個區(qū)間的概率,依據(jù)概率將連續(xù)變量離散到各個區(qū)間。

表1 節(jié)點變量狀態(tài)空間
本文將5種連續(xù)變量由高到低分成3~4個區(qū)間,各個區(qū)間的具體云模型參數(shù)如表2所示。隸屬度計算采用正太云模型隸屬函數(shù),函數(shù)定義如下:
(3)
根據(jù)各個區(qū)間云模型參數(shù),使用正向云發(fā)生器(FCG)對各連續(xù)變量生成云滴數(shù)N=2 400的變量云簇,各連續(xù)變量云簇如圖3所示。

表2 連續(xù)變量云模型參數(shù)
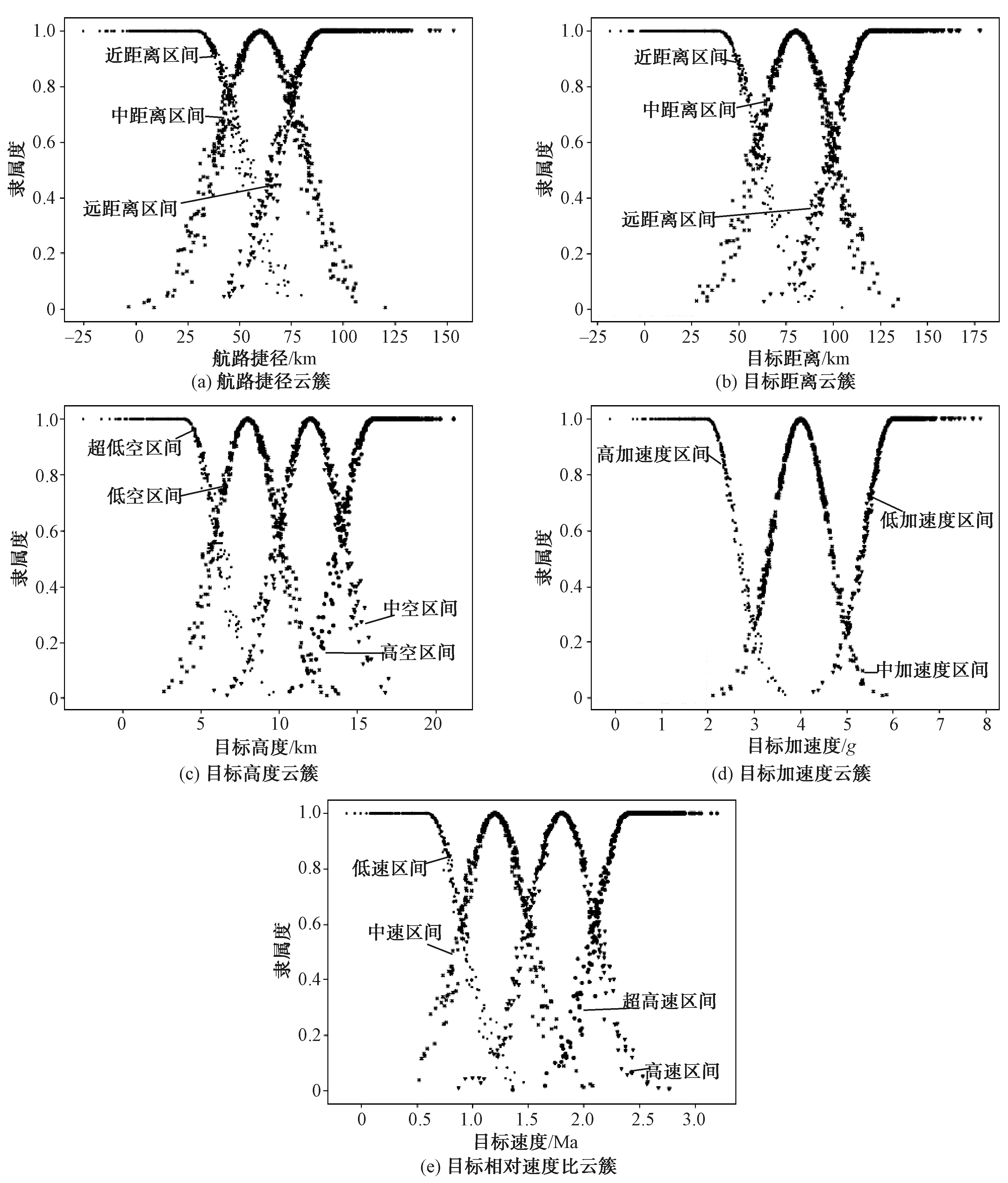
圖3 連續(xù)變量云簇
2.2 基于爬山算法的BN結(jié)構(gòu)學(xué)習(xí)
目前研究的艦艇防空威脅評估模型網(wǎng)絡(luò)結(jié)構(gòu)一般由專家直接給出。但在實際的艦艇威脅估計任務(wù)中,由專家直接設(shè)定的貝葉斯網(wǎng)絡(luò)結(jié)構(gòu)和模型參數(shù)具有主觀性,不能完全滿足不同類型、不同作戰(zhàn)分工的艦艇的作戰(zhàn)需求。而由艦艇直接收集到的作戰(zhàn)數(shù)據(jù)學(xué)習(xí)得到的網(wǎng)絡(luò)結(jié)構(gòu)雖然能在訓(xùn)練集上有不錯的性能,但這對樣本的數(shù)據(jù)量大小提出了要求,數(shù)據(jù)量小容易使模型過擬合,而大量的真實作戰(zhàn)數(shù)據(jù)又難以獲取。因此,本文結(jié)合數(shù)據(jù)學(xué)習(xí)和專家知識,先采用爬山算法從訓(xùn)練數(shù)據(jù)學(xué)習(xí)得到評分最優(yōu)的網(wǎng)絡(luò)結(jié)構(gòu),再綜合專家網(wǎng)絡(luò)改進(jìn)模型結(jié)構(gòu)。
爬山算法是一種基于評分搜索的網(wǎng)絡(luò)結(jié)構(gòu)學(xué)習(xí)算法,它通過在搜索過程中不斷地進(jìn)行加邊、減邊以及刪除邊的局部操作,并根據(jù)評分函數(shù)變化來確定是否選擇該操作[8]。爬山算法的主要流程如表3所示。

表3 爬山算法步驟
本文使用1 000組威脅評估訓(xùn)練數(shù)據(jù)對威脅評估模型進(jìn)行學(xué)習(xí),通過Bdeu評分函數(shù)對網(wǎng)絡(luò)結(jié)構(gòu)評估分?jǐn)?shù),得到每個節(jié)點最強(qiáng)關(guān)聯(lián)度的節(jié)點集合和網(wǎng)絡(luò)最優(yōu)評分結(jié)構(gòu)DAG。結(jié)合專家直接給出的網(wǎng)絡(luò)模型[4],增加網(wǎng)絡(luò)中目標(biāo)類型和目標(biāo)距離之間的邊。因為反艦導(dǎo)彈和攻擊型飛機(jī)執(zhí)行攻擊任務(wù)時通常從遠(yuǎn)距離啟動,隨著時刻目標(biāo)距離由遠(yuǎn)逐漸變近;而輔助型飛機(jī)和偵察機(jī)執(zhí)行任務(wù)時通常全程在中遠(yuǎn)距離的高空。所以2個節(jié)點之間存在較強(qiáng)的關(guān)聯(lián)性。
為了使模型具有處理時序信息的能力,將單時間片的貝葉斯網(wǎng)絡(luò)模型拓展到相鄰時間片下,使BN模型擴(kuò)展成為DBN模型。威脅評估動態(tài)貝葉斯網(wǎng)絡(luò)模型結(jié)構(gòu)如圖4所示。在圖4中,長方形節(jié)點表示威脅評估模型中的觀測節(jié)點,橢圓形節(jié)點表示模型中的隱藏節(jié)點。將艦載傳感器得到的敵方目標(biāo)觀測信息云化處理后作為威脅評估模型中的證據(jù)信息,再使用貝葉斯網(wǎng)絡(luò)推理算法推算隱藏節(jié)點的概率分布。
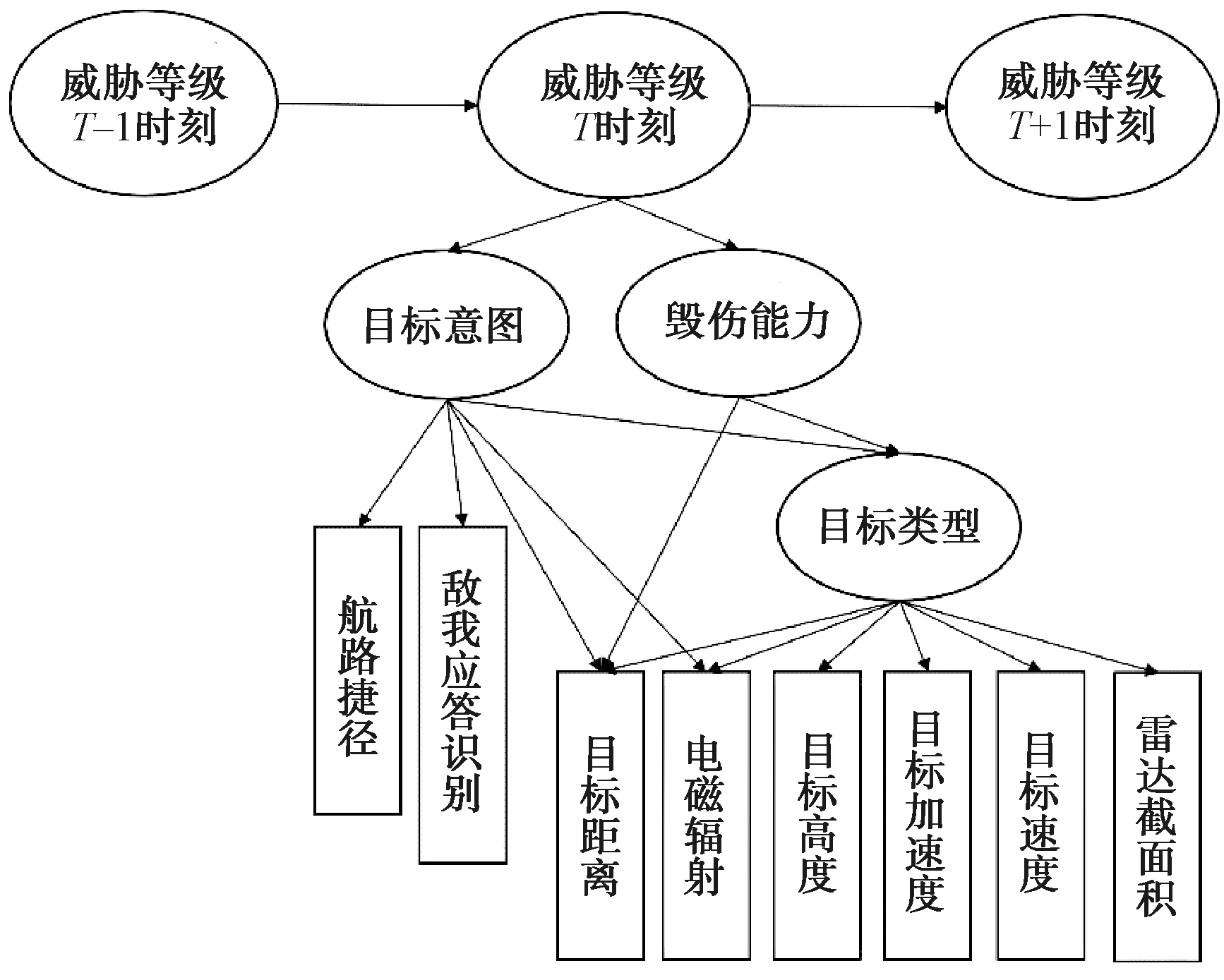
圖4 威脅評估DBN模型結(jié)構(gòu)圖
2.3 網(wǎng)絡(luò)參數(shù)學(xué)習(xí)
確定威脅評估模型網(wǎng)絡(luò)結(jié)構(gòu),本文使用最大似然估計[9](MLE)算法學(xué)習(xí)威脅評估模型的網(wǎng)絡(luò)參數(shù)。模型的網(wǎng)絡(luò)參數(shù)包括父子節(jié)點間條件概率分布、時間片間的威脅等級的狀態(tài)轉(zhuǎn)移概率分布和威脅等級的邊緣概率分布。本文使用1 000組數(shù)據(jù)對動態(tài)貝葉斯模型進(jìn)行參數(shù)學(xué)習(xí),其中每組數(shù)據(jù)包含10個時刻。參數(shù)學(xué)習(xí)得到的威脅等級的邊緣概率、狀態(tài)轉(zhuǎn)移概率以及條件概率分布如表4~表6所示。其中,H、M、L分別表示毀傷能力強(qiáng)、中、弱;而A、S、M、O分別表示目標(biāo)意圖為攻擊、輔助攻擊、偵察和其他。

表4 威脅等級邊緣概率分布
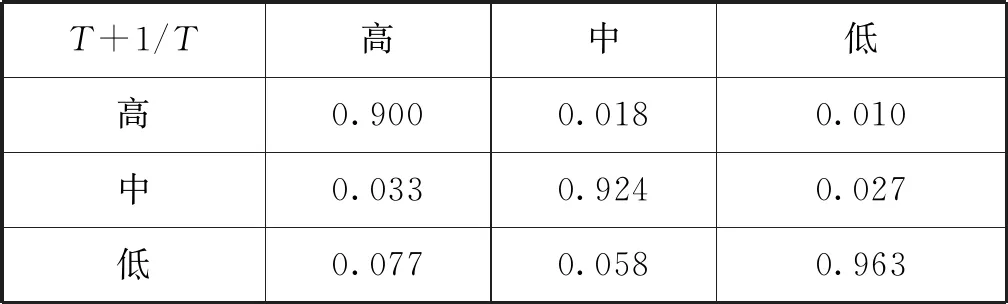
表5 威脅等級狀態(tài)轉(zhuǎn)移概率

表6 威脅等級條件概率分布
3 推理威脅評估
為了驗證動態(tài)云威脅評估模型的可行性和有效性,本文假定我方艦艇在某時刻檢測到5個不同類型的目標(biāo),雷達(dá)記錄了連續(xù)10個時刻的目標(biāo)觀測數(shù)據(jù),展示幾種不同類型目標(biāo)執(zhí)行任務(wù)的觀測數(shù)據(jù)進(jìn)行分析。表7展示了反艦導(dǎo)彈執(zhí)行攻擊任務(wù)模擬生成的1組觀測數(shù)據(jù)。將觀測數(shù)據(jù)通過云模型離散化方法預(yù)處理,處理后數(shù)據(jù)如表8所示,可以看出離散化后數(shù)據(jù)具有一定的差異,這體現(xiàn)了云模型的不確定性和隨機(jī)性的特點。最后使用聯(lián)合樹算法[10]推理云化后的觀測數(shù)據(jù)、計算威脅等級、目標(biāo)類型、目標(biāo)意圖的后驗分布。

表7 反艦導(dǎo)彈觀測數(shù)據(jù)

表8 反艦導(dǎo)彈云處理觀測數(shù)據(jù)
將威脅等級低、中、高分別賦予權(quán)值[0,0.5,1],計算出直觀表示威脅程度的威脅評估值,顯然威脅評估值在區(qū)間[0,1]內(nèi),數(shù)值越大表示威脅越高。表9對比了反艦導(dǎo)彈在執(zhí)行攻擊任務(wù)時在不同模型下10個時刻的威脅評估值,其中原模型表示專家提出的動態(tài)貝葉斯網(wǎng)絡(luò)模型,改進(jìn)模型表示結(jié)構(gòu)學(xué)習(xí)和專家知識融合后的動態(tài)貝葉斯網(wǎng)絡(luò)模型。從表中可以看出,2種模型都能夠較好地完成威脅評估任務(wù),原模型由于變量節(jié)點間關(guān)聯(lián)性較差,推理結(jié)果與實際情況貼合不夠,而改進(jìn)后模型威脅評估數(shù)值更為合理。

表9 反艦導(dǎo)彈2種模型在10個時刻威脅評估值推理結(jié)果
表10和表11展示了攻擊型飛機(jī)在執(zhí)行攻擊任務(wù)時,2種模型在第10個時刻的目標(biāo)類型和目標(biāo)意圖的推理結(jié)果。由于反艦導(dǎo)彈和攻擊型飛機(jī)在執(zhí)行攻擊任務(wù)時在觀測變量上有一定程度的相似性,導(dǎo)致原模型目標(biāo)類型的推理結(jié)果并不準(zhǔn)確;而2種模型在目標(biāo)意圖上的推理結(jié)果相差不大。綜合上述兩者,基于結(jié)構(gòu)學(xué)習(xí)的改進(jìn)模型推理結(jié)果更為可靠。圖5展示了反艦導(dǎo)彈、攻擊型飛機(jī)、輔助型飛機(jī)、偵察機(jī)和其他類型飛機(jī)分別執(zhí)行攻擊、輔助攻擊、偵察和其他任務(wù)時10個時刻的威脅評估值。從圖中可以看出,改進(jìn)模型對于不同類型的目標(biāo)得到的結(jié)論與實際情況基本相符。

表10 攻擊型飛機(jī)兩種模型在第10時刻目標(biāo)類型推理結(jié)果

表11 攻擊型飛機(jī)2種模型在第10時刻目標(biāo)意圖推理結(jié)果
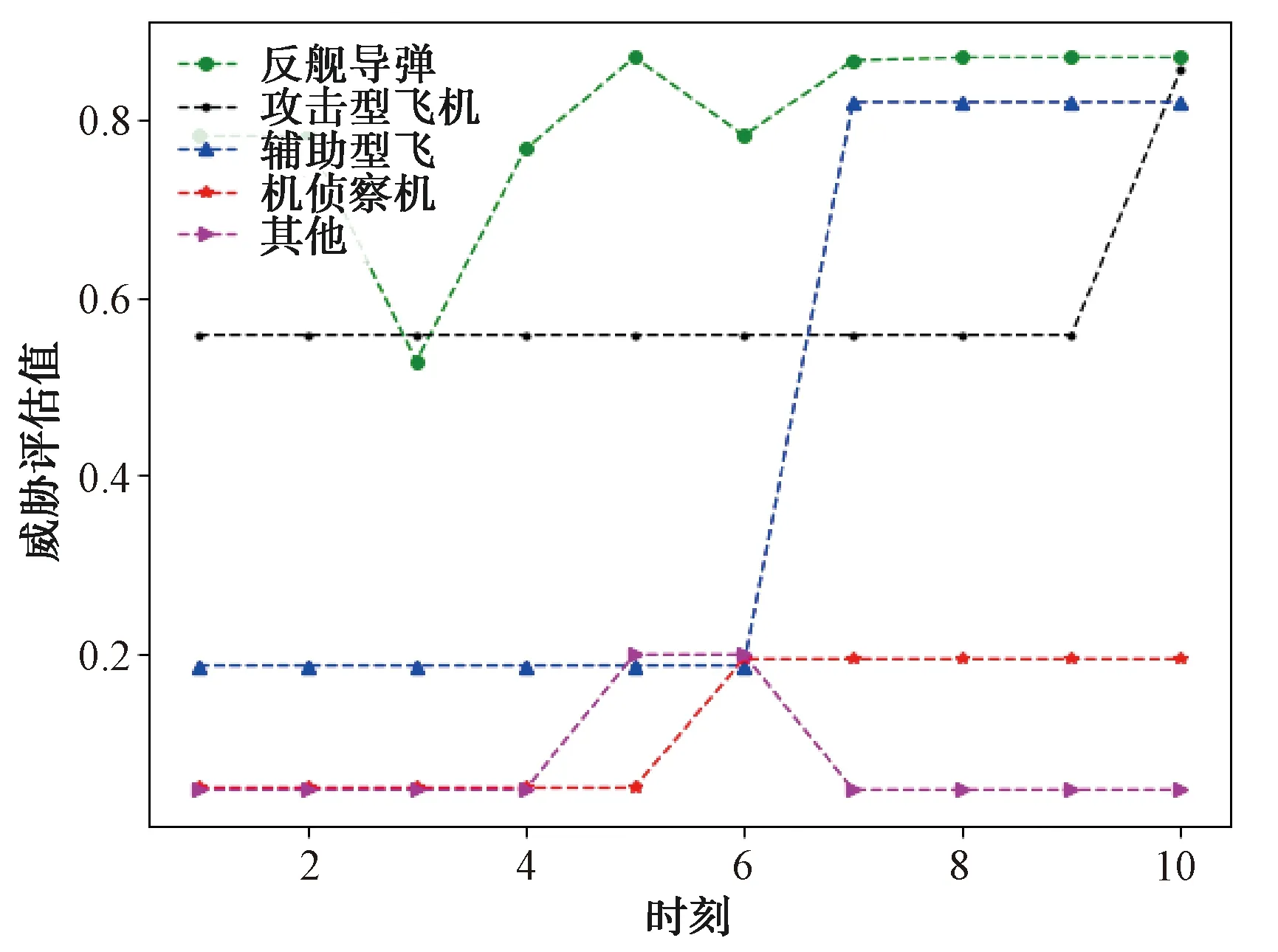
圖5 改進(jìn)模型各類型目標(biāo)威脅評估結(jié)果
4 結(jié)束語
本文通過基于網(wǎng)絡(luò)結(jié)構(gòu)學(xué)習(xí)的動態(tài)云貝葉斯網(wǎng)絡(luò)模型對艦艇防空中目標(biāo)的威脅等級進(jìn)行評估。該方法利用了云模型知識表達(dá)的不確定性和隨機(jī)性的特點,將艦艇防空威脅因素中的連續(xù)變量離散化;結(jié)合網(wǎng)絡(luò)學(xué)習(xí)和專家知識,學(xué)習(xí)得到更有效的貝葉斯模型網(wǎng)絡(luò)結(jié)構(gòu),增加了原結(jié)構(gòu)內(nèi)部的關(guān)聯(lián)性;最后利用動態(tài)貝葉斯網(wǎng)絡(luò)的推理能力,求解各個時刻目標(biāo)的威脅等級、目標(biāo)類型和目標(biāo)意圖的概率分布。
威脅評估的推理結(jié)果表明,動態(tài)云貝葉斯網(wǎng)絡(luò)模型在艦艇防空威脅評估問題上是有效的,改進(jìn)網(wǎng)絡(luò)模型和原模型相比,在推理結(jié)果上具有更優(yōu)秀的表現(xiàn)。此外,貝葉斯網(wǎng)絡(luò)參數(shù)學(xué)習(xí)的速度和其他智能威脅評估模型,將是筆者下一步研究的重要問題。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
