面向多級效費分析需求的無人偵察機效能評估
2021-04-15 07:09:00屈高敏董彥非符凌云李繼廣
西安航空學院學報 2021年5期
屈高敏,董彥非,符凌云,李繼廣
(1.西安航空學院 飛行器學院,西安 710077;2.空軍工程大學 航空工程學院,西安 710038)
0 引言
隨著航空科學技術的發展,各類作戰飛機性能在快速提升的同時,其系統的復雜度也不斷增加,這導致整機采購和使用等費用也急劇攀升。為了解決新型作戰飛機各項費用上漲過快的問題,美國在20世紀60年代針對性地提出了效能和壽命周期費用的概念,建立了效費分析方法。使用效費分析方法在飛機系統的整個壽命周期內,全過程實時跟蹤和控制,分階段進行評審,并做出相應的決策,取得了顯著的效果[1-2]。
21世紀,以無人偵察機為代表的軍用無人機得到快速發展[3-6],其研發過程中對效費分析的需求也越來越迫切。對無人偵察機進行效費分析具有層次性要求,除了整機級的效費分析,還要進行系統/分系統級和設備級的效費分析。
無人機效能評估在國內開展的研究較多,劉大成等人[7]采用改進ADC模型綜合評估了反輻射無人機作戰輻射源(雷達)能力、突防能力和毀傷能力等分項能力;張旺等人[8]針對電子信號偵察設備、合成孔徑雷達和長焦距傾斜CCD相機3種機載偵察載荷計算了協同偵察能力,在各分項模型評估的基礎上,采用線性加權算法建立了無人機多偵察載荷的協同偵察效能模型。這類以分項能力綜合建立的模型目前是無人機效能評估研究的主要方法[9-14]。此類效能評估方法沒有以系統/分系統和設備等實體為基礎建立評估模型,其主要問題,一是整機級以下的效能評估無法與壽命周期費用分析相匹配進行效費分析;二是不能從設備的角度分析整機效能,不利于費用數據的搜集和處理。因此,出于對多級效費分析以及相關費用分析的需求,必須以設備和系統為基礎建立無人偵察機各級效能評估模型。
綜合以上分析,本文首先基于系統/分系統建立整機級效能評估指標體系框架,再針對各系統/分系統分別建立評估指標體系,然后基于不同層級建立相應的效能評估模型。
1 指標體系
效能評估指標體系是建立評估模型的基礎。無人機系統效能評估指標要能夠保證針對具體的無人機進行效能評估時,能根據實際需要對指標進行相應裁剪(在圖中可用虛線和虛框標示),以適應數據資源和評估任務的特點和需求,滿足效能評估和效費分析的要求。
本文選擇“無人偵察機系統效能”作為一級指標。根據無人偵察機系統任務功能種類和效能評估需要,在一級能力指標下以系統/分系統/設備為中心進行分解,形成二級效能指標:無人機平臺、數據鏈、任務載荷(雷達、光電等)、地面站、情報分發等。指標體系中無人機平臺指標雖然是必選項,但是在效能評估時,其后續的二級或者三級指標均可根據需要剪裁。二級效能指標確定后,各項效能向下再分解形成系統級/分系統級能力指標,即三級能力指標。無人偵察機效能評估指標體系框架示意圖如圖1所示。
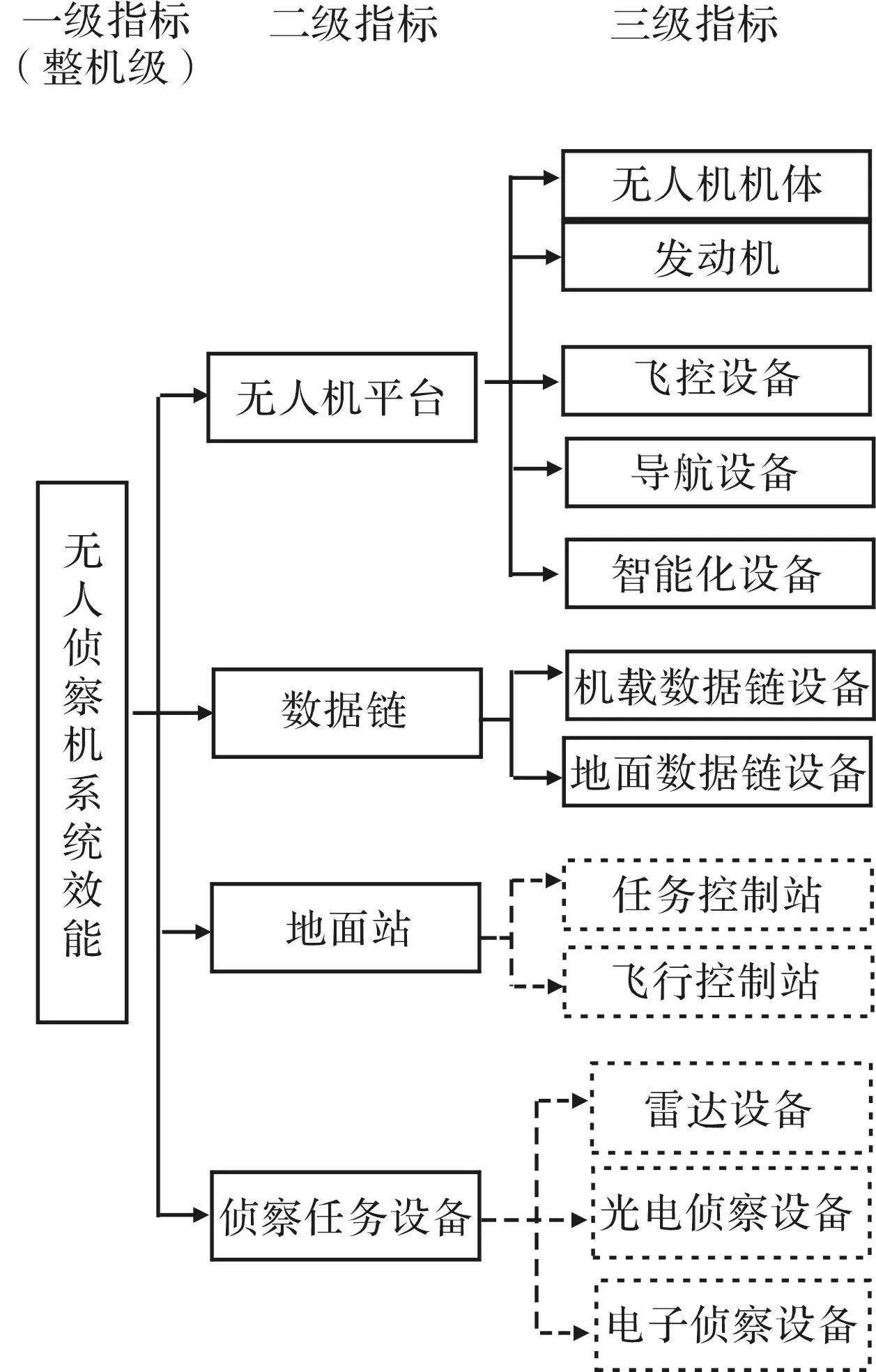
圖1 無人偵察機效能評估指標體系框架示意圖
二級指標中,無人機平臺和數據鏈是必選指標。無人機平臺效能評估指標體系如圖2所示,數據鏈效能評估指標體系如圖3所示。所有無人機系統都要包括無人機平臺的評估,其他二級指標則要根據無人機類型和功能、評估任務需要以及數據準備情況等合理剪裁選擇。可信度和可用度根據數據可用情況和評估需要決定取舍。
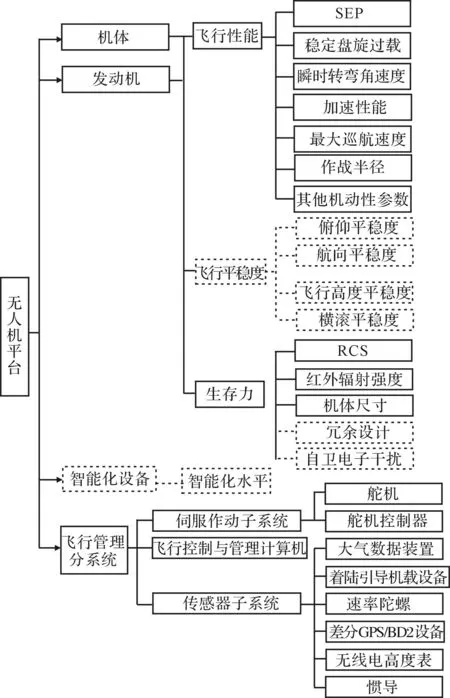
圖2 無人機平臺效能評估指標體系
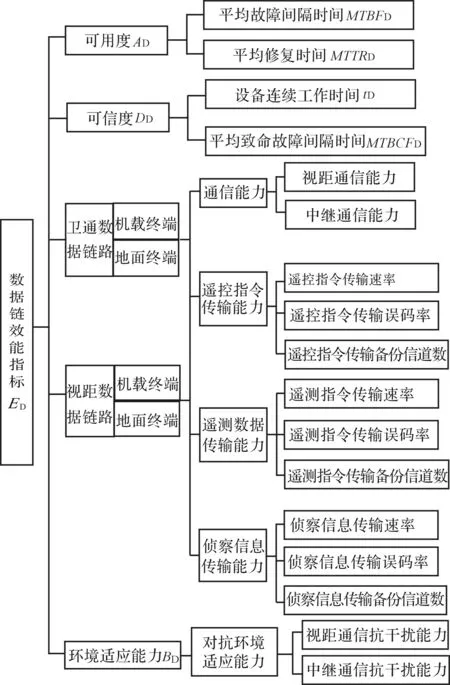
圖3 數據鏈效能評估指標體系
無人偵察機的偵察設備主要包括合成孔徑雷達(SAR)和機載光電偵察設備等(如電視攝像設備、熱成像儀、相機和激光設備等)。雷達效能評估指標體系如圖4所示。
實際評估中,數據鏈路的機載終端和地面終端是聯合使用的,可以僅在數據鏈評估時考慮。地面控制站效能評估指標體系如圖5所示。此外,根據需要,情報處理也可以在專門的情報處理與分發評估中考慮。
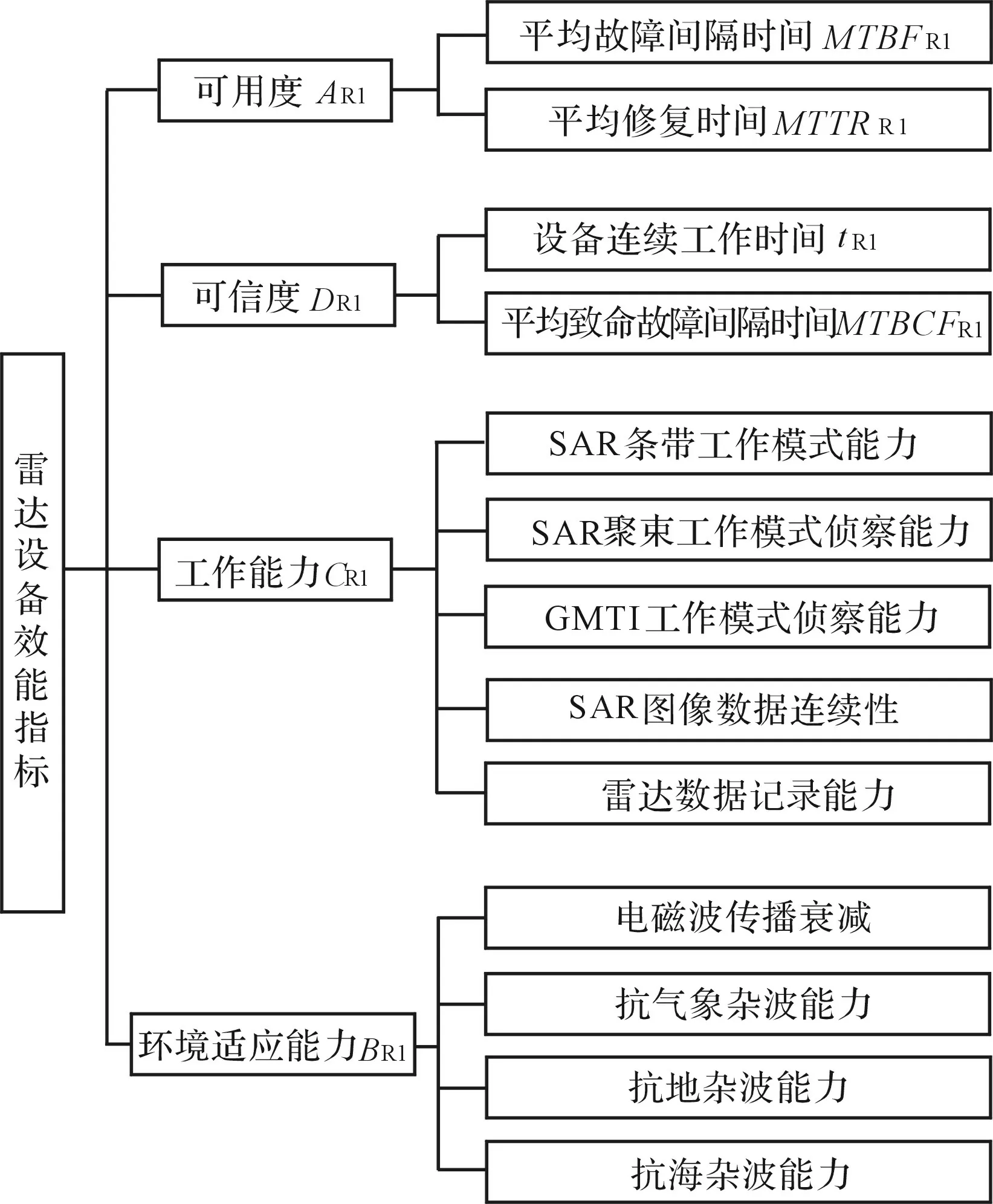
圖4 雷達效能評估指標體系
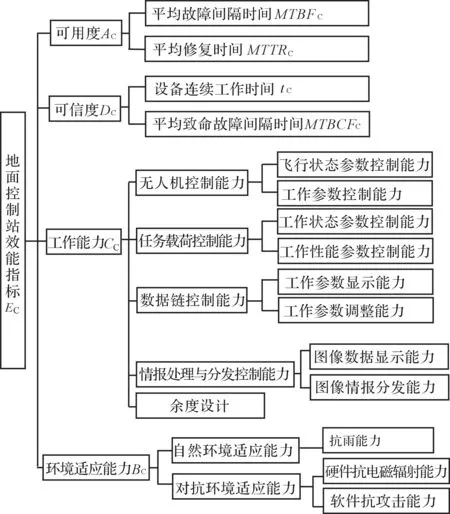
圖5 地面控制站效能評估指標體系
二級能力指標還可以繼續分解。根據不同的系統/分系統,可以分解到相應的系統/分系統的性能指標。
2 分級建模
2.1 整機評估模型
根據實際使用,將無人偵察機各分系統/設備能力進行相關性分析,進而判斷各分系統/設備能力之間是“加性”數學關系還是“乘性”數學關系。將相關的能力指標之間處理為相乘的關系,不相關的能力指標處理為相加的關系。
無人偵察機的整機效能主要由無人機平臺、地面控制站、任務載荷和數據鏈四部分組成。根據評估任務需求,可以選擇是否加入第五部分“綜合保障”。
無人機平臺效能EF、地面控制站效能EC和任務載荷效能ER之間無關,處理為加權和關系,數據鏈效能ED和綜合保障效能Ez與以上分項效能相關,處理為相乘的關系,建立分項能力綜合的混合數學模型:
E=(WEFEF+WECEC+WERER)EDEZ(1)
式中:無人機平臺效能權重值WEF取值0.45;地面控制站效能權重值WEC取值0.10;偵察任務載荷權重值WER取值0.45。
模型中權重取值參考GJB 6704-2009中數據,其中未涉及的采用專家打分以及層次分析法確定,以下的評估模型采用類似方法處理。
2.2 系統/分系統評估模型
無人機平臺由機體、發動機、飛控設備、導航設備和智能化設備組成。
CF=0.36Cb+e+0.23Cng+0.21Cfc+0.20Ci1(2)
式中:Cb+e為機體和發動機能力;Cng為導航能力;Cfc為飛行控制能力;Ci1為智能化水平。
無人機機體與發動機工作能力由飛行性能(包括機動性能參數、基本性能參數)和生存力組成:
式中:機動能力參數Man、基本性能指標Bp和生存力參數Sur上面的橫杠表示要進行歸一化或公度化處理(以下同);權重系數wMan、wBp、wSur分別為0.35、0.28、0.37。
機動性能參數Man用無人偵察機最大允許過載、最大盤旋過載和最大單位重量剩余功率求得:
式中:εc為操縱性能系數;nymax為最大法向過載量;nyp為最大盤旋過載量;SEP為單位重力剩余功率;權重系數wB1、wB2、wB3分別取0.35、0.35、0.3。
數據鏈設備的工作能力為:
式中:CD1為通信能力,通信能力權重值WcD1取值0.2;CD2為遙控指令傳輸能力,遙控指令傳輸能力權重值WCD2取值0.3;CD3為遙測數據傳輸能力,遙測數據傳輸能力權重值WCD3取值0.3;CD4為偵察信息傳輸能力,偵察信息傳輸能力權重值WCD4取值0.2。
任務載荷中,SAR工作能力為:
式中:CR11為SAR條帶工作模式能力,SAR條帶工作模式權重值WCR11取值0.35;CR12為SAR聚束工作模式偵察能力,SAR聚束工作模式偵察能力權重值WCR12取值0.35;CR13為GMTI工作模式偵察能力,GMTI工作模式偵察能力權重值WCR13取值0.3。
地面控制站工作能力:
式中:CC1為無人機控制能力歸一化值,無人機控制能力權重值WCC1取值0.35;CC2為任務載荷控制能力歸一化值,任務載荷控制能力權重值WCC2取值0.25;CC3為情報處理與分發設備控制能力歸一化值,情報處理與分發設備控制能力權重值WCC3取值0.20;CC4為設備余度歸一化值,設備余度權重值WCC4取值0.20。
3 效能評估分析
選取國外七種無人偵察機URA1至URA7,分別計算無人機平臺、數據鏈、偵察任務設備、地面站等分系統效能,再綜合計算整機系統效能評估。
為了驗證模型,選擇GJB 6704-2009無人偵察機效能分析方法中的效能評估總模型[15]。不同的建模思想或方法得到的效能值會存在差異,但是如果建模和計算合理,總體結果(如效能排序)應該一致或略有差異,可以相互印證。七種無人偵察機效能評估計算結果如表1所示。從表1中可以看出,本文的效能評估模型計算結果與GJB模型計算結果在效能排序上基本一致,僅在第5名與第6名排序上,URA5與URA4有位置交換。可以說明建模方法的合理性。
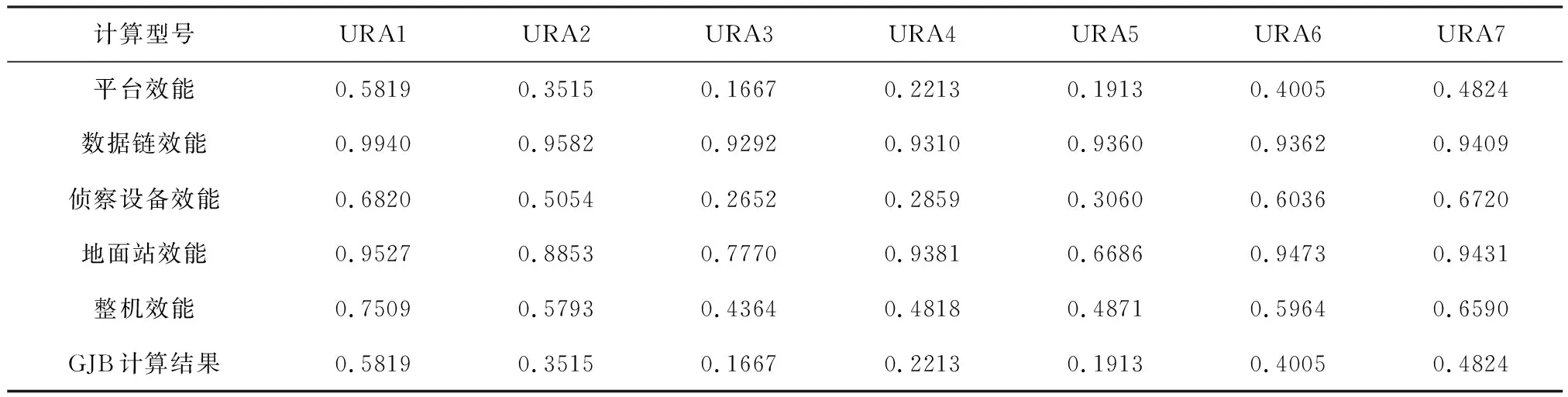
表1 七種無人偵察機效能評估計算結果
4 結論
(1)無人偵察機指標體系可以全面反映效能的層次性和面向設備的要求。
(2)無人偵察機整機級和系統/分系統評估建模思路和方法合理、可用,可以滿足多級效費分析要求。
(3)本文的評估方法以及效能評估結果僅具參考作用,具體評估需要根據評估目的、數據完整度等因素,結合參數敏感性分析,參考本文評估方法,最終確定符合項目需求的評估模型和方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
發明與創新(2022年30期)2022-10-03 08:40:56
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
人大建設(2018年6期)2018-08-16 07:23:10
電子制作(2018年11期)2018-08-04 03:26:08
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
光學精密工程(2016年6期)2016-11-07 09:07:19
工業設計(2016年12期)2016-04-16 02:52:00