扇貝苗規格識別與計數裝置優化設計與試驗
2021-04-15 09:55:44李明智陳海泉張光發孫玉清
農業工程學報 2021年3期
李明智,陳海泉,劉 鷹,張光發,孫玉清
(1. 大連海事大學輪機工程學院,大連 116026;2. 大連海洋大學航海與船舶工程學院,大連 116023; 3. 大連海洋大學遼寧省水產設施養殖與裝備技術工程研究中心,大連 116023; 4. 上海電機學院機械學院,上海 201306)
0 引 言
底播已成為中國蝦夷扇貝(Patinopecten Yessoensis)最主要的增養殖模式,其核心是大規格優質苗種按標準投放至優質海域,確保貝苗健康成活。因此,識別優質苗種是保障海洋牧場扇貝資源可持續發展的關鍵。目前,中國底播前貝苗的規格識別與計數作業仍以人工為主,存在勞動強度高、效率低、準確性差等問題,致使貝苗的最佳底播時機常被延誤,貝苗干露現象嚴重,成活率低。因此,研發精準、高效的扇貝苗規格識別與計數裝置對扇貝底播增殖具有重要意義。
近年來,針對水產品的規格識別主要采用基于形態特征的機械分選、光電傳感識別技術和機器視覺識別技術等[1-3]。在扇貝的機械分選方面,孔德剛等[4-9]利用扇貝自身形狀特征,采用螺旋對輥上階段性深淺變化的螺旋槽實現扇貝分級;方曉燕等[10]基于扇貝的形態特征,設計了電磁分層振動分級裝置,并以最小直徑為標準實現了4個等級的扇貝分選。在光電傳感識別技術方面,李明智等[11-12]針對貝苗底播增殖前的分選與計數需求,將平板篩網分級與光電傳感技術相結合,實現了貝苗的高效分級與計數,初步滿足了海上貝苗的統計需求。在機器視覺識別技術方面,李艷君等[13]采用雙目立體視覺技術獲得水下動態魚體尺寸的方法,實現水下魚體信息動態感知和快速無損檢測;張志強等[14-15]利用機器視覺技術獲取淡水魚樣本圖像,先后建立了魚體質量的預測模型和品種識別模型,實現了魚類質量分級和品種識別;王文靜等[16]通過獲取了半滑舌鰨(Cynoglossus semilaevis)在不同生長階段的圖像和質量數據,建立了面積與質量的數據擬合模型,實現了水下魚類質量評估;林艾光等[17]采用閾值處理、膨脹腐蝕等方式對圖像進行處理,并以扇貝面積作為提取特征,通過數學模型確定扇貝面積與殼長的關系,進而實現扇貝規格識別;郭常有等[18]采用改進的OPTA(One-Pass Thinning Algorithm)算法提取扇貝的邊界,通過計算扇貝圖像邊界各點相對距離的最大值識別其尺寸;楊眉等[19]以提取目標物邊界到中心點的平均距離和距離的絕對平均誤差作為特征信息,從而實現扇貝圖像的自動識別;Fearn等[20]設計了用于海底資源存量調研的計算機視覺軟件系統,實現了海底生物(魚和扇貝等)的尺寸和數量的智能統計。目前,國內采用扇貝苗海上收購、規格識別與計數、底播增殖的一體化作業模式,統計量大,時間緊和作業環境惡劣等,要求貝苗規格識別與計數裝置具有較高的穩定性和準確性。由于機器視覺識別技術對作業環境要求較高,限制了其在海上作業的應用。課題組針對國內扇貝底播增殖作業模式,利用機械篩網實現貝苗分級,利用光電傳感器實現貝苗計數,對海上作業環境具有較強的適應性[11-12]。但在使用中發現,篩選過程中存在貝苗互插、篩網卡貝等問題,造成貝苗破損和篩選效率低;篩選后需要人工將貝苗逐只投入計數裝置中,計數準確性受人工單位時間投苗量影響,對操作人員要求較高。為此,本文在文獻[11-12]的基礎上,采用光電傳感技術實現貝苗高速運動狀態下,規格識別與數量同步檢測,基于貝苗的生物學特征,設計了貝苗活體識別與初級排隊裝置,實現活體貝苗識別;設計了貝苗差速排隊傳送裝置,避免貝苗堆疊,實現貝苗逐只傳送;結合貝苗規格識別機理,設計了貝苗下落導向機構,確保貝苗垂直光電傳感器光幕下落。
1 整機結構與工作原理
1.1 整機結構
圖1為扇貝苗規格識別與計數裝置,主要由篩選分揀平臺、貝苗活體識別與初級排隊裝置、貝苗差速排隊傳送裝置、貝苗下落導向機構、貝苗規格識別與計數系統等組成。
篩選分揀平臺采用聚氯乙烯(PVC, Polyvinyl Chloride)材質的孔板,其作用是分揀碎貝、死貝、去除雜貝、篩掉不符合底播要求的貝苗(殼高<25 mm)等;貝苗活體識別與初級排隊裝置由振動電機(HY-0.1型、220 V、15 W)、篩網(孔徑10 mm)、限寬排隊擋板等組成,其作用是通過振動實現貝苗活體識別,即經過振動,活性好的貝苗會應激閉口,活性差的貝苗開口,同時利用限寬排隊擋板(限寬為5 cm),實現貝苗的排隊傳送;貝苗差速排隊傳送裝置主要由波紋排隊擋板、同步齒輪傳送帶(長0.8 m、寬310 mm)及交流電機(轉速1 650 r/min、功率200 W、齒輪減速器6GN10K)組成,其作用是利用相鄰波紋排隊擋板與傳送帶運動方向角度的差異,實現貝苗差速運動;利用排隊擋板上波紋結構對貝苗的作用力,實現貝苗的高速旋轉。二者的耦合作用,實現貝苗差速旋轉排隊傳送,使相互堆疊的貝苗分離,實現貝苗逐只傳送;貝苗下落導向機構由PVC材質的凹型板構成,其作用是調整貝苗下落姿態,使貝苗垂直光電傳感器光幕下落,實現貝苗規格的精準識別。
貝苗規格識別與計數系統主要由電子秤、光電傳感器、可編程邏輯控制器(PLC,Programmable Logic Controller)、簡易文本顯示器和微型打印機等組成,主要功能是采集扇貝苗的質量、數量和規格數據,并顯示與輸出。其中,光電傳感器的型號為IMS_CXY70×70,分辨率為1.5 mm,檢測口徑為70 mm×70 mm,外部尺寸為150 mm×150 mm×11 mm,工作環境溫度為-15~50 ℃,保護等級IP65(防塵、防止噴射的水侵入);電子秤型號BT418W,最大量程為15 kg,精度為0.1 g;PLC型號為三菱FX2N;打印機采用RD-DH系列嵌入式微型打印機。
1.2 工作原理
扇貝苗規格識別與計數裝置的工作流程如圖2所示。由電子秤對貝苗進行稱質量,其質量數據存入PLC中;將稱質量后的貝苗放置于篩選分揀平臺,人工對混在待檢測扇貝苗中的雜貝、死貝和碎貝等進行清除,同時利用平臺上的篩孔篩除不符合底播要求的貝苗;初選后的貝苗倒入貝苗活體識別與初級排隊裝置的投料槽內,貝苗在振動作用下,由投料槽的出口沿限寬排隊擋板傳送,逐只落入下級差速排隊裝置。
傳送過程中,貝苗活性識別與初級排隊裝置的振動可使活性好的貝苗閉口,活性差的貝苗開口,人工將活性差的貝苗清除,實現貝苗優選;貝苗在差速傳送排隊裝置波紋擋板的作用下,實現傳送過程中貝苗旋轉與差速傳送,讓堆疊和互插的貝苗分開,使相鄰貝苗在傳送過程中保持一定間距;貝苗由差速傳送排隊裝置進入光電傳感器前,在下落導向機構作用下貝苗垂直光電傳感器光幕下落,實現貝苗規格的精準識別;光電傳感器讀取的數據自動記錄到PLC中,PLC讀取傳感器光電開關閉合次數,實現貝苗計數,讀取傳感器光電開關閉合時間數據,并與樣本數據進行對比分析,實現貝苗規格識別。貝苗的質量、規格與數量數據由簡易文本顯示器顯示,由打印機輸出。
2 扇貝苗規格識別機理與精度分析
2.1 扇貝苗規格識別機理
本文基于光幕靶的測速原理[21-22],檢測貝苗通過ISM光電傳感器時遮擋光幕的時間與遮擋光幕的次數,實現貝苗規格識別與計數的同步檢測。設貝苗以恒速度v0垂直經過光電傳感器,記錄貝苗接觸光幕的時刻t0和離開光幕的時刻ti,則貝苗遮擋光幕的時間該數據作為所測貝苗規格的表征。因此,本文基于PLC讀取光電傳感器檢測的數據,實現貝苗規格識別與計數檢測。
貝苗規格識別與計數系統工作為:啟動系統并初始化,設定貝苗規格識別閾值(殼高為30 mm貝苗遮擋光幕的時間),啟動傳送帶,檢測與采集貝苗遮擋光電傳感器光幕的時間與次數,當貝苗遮擋光幕的時間≥設定貝苗規格閾值為大規格貝苗,反之為小規格貝苗,貝苗規格與計數數據存儲至PLC寄存器中。重復上述過程,逐只完成貝苗規格識別與計數,待完成后檢測數據由微型打印機輸出。
2.2 識別精度分析
基于貝苗規格的識別機理可知,貝苗遮擋光幕的時間為
式中Δt為貝苗遮擋光幕的時間,ms;L為貝苗通過傳感器時檢測的尺寸,mm;v為貝苗下落的平均速度,mm/ms。
對式(1)求微分,得到誤差式(2)[21]
由公式(2)可知,測時誤差dΔt與貝苗的不規則性誤差dL和測速誤差dv有關。貝苗不規則性誤差,主要包括貝苗外殼不規則誤差ΔLL和運動不規則誤差ΔLγ。其中,貝苗外殼不規則誤差ΔLL指貝苗以不同下落姿態通過傳感器時檢測的尺寸與標準尺寸的偏差。圖3為貝苗垂直下落通過傳感器時的4種代表性下落姿態,其中圖3a為貝苗外殼的高度尺寸(標準尺寸),圖3b,圖3c,圖3d代表偏離標準尺寸的下落姿態,與標準尺寸的差值即為貝苗外殼不規則誤差ΔLL。本文隨機抽取25.0~29.9 mm和30.0~40.0 mm蝦夷扇貝苗各1 000只,通過測量不同姿態的貝苗外殼尺寸,得出貝苗外殼的不規則誤差約為-1~2 mm。
貝苗的運動不規則誤差主要指貝苗出現非垂直傳感器光幕下落時產生的誤差,該部分誤差與非垂直度γ有關,其計算公式為
上述2種誤差通常不會同時出現最大值,本文采用兩者均方和表征貝苗的不規則性誤差ΔL[21],即
測速誤差dv與傳感器和傳送帶的垂直位置差h、下落導向機構與傳送帶的水平距離l、傳送帶的運動速度v0、貝苗通過傳感器時檢測的尺寸L和重力加速度g有關。
如圖4所示,貝苗在傳送帶的作用下,以速度v0做平拋運動,平拋角為θ,貝苗在觸碰下落導向擋板后處于垂直下落狀態。因此,測速誤差Δv為貝苗進出傳感器的速度差,其計算公式為
將公式(4)~(5)代入公式(2)中,即得出測時誤差。
3 關鍵結構設計
為了實現貝苗的精準識別與計數,需要在檢測前分揀出貝苗中的碎貝、死貝、雜貝和不符合底播要求的貝苗。因此,本文設計了篩選分揀平臺、貝苗活體識別與初級排隊裝置、差速排隊傳送裝置和貝苗下落導向機構,為光電傳感器數據讀取與識別的準確性提供保障。
3.1 初篩分揀平臺
目前底播貝苗的規格識別與計數要求為:殼高30 mm以上(含30 mm)為大規格貝苗,殼高25~30 mm為小規格貝苗,殼高25 mm以下不滿足底播要求,直接篩除;同時貝苗中不能混有死貝、碎貝和雜質等。因此,在進行規格識別與計數前,需要人工將不滿足底播要求的貝苗和雜質等去除,保證后續的抽標統計準確性。本文設計了初篩分揀平臺,其結構如圖5所示。平臺材質為PVC,尺寸為1 200 mm×900 mm×3 mm,依據文獻[11]研究結果,平臺篩孔為Φ24 mm,采用45°錯位布置時,可有效篩除25 mm以下貝苗。操作人員可在初篩分揀平臺對死貝、碎貝等進行初步分揀,不滿足要求的貝苗(<25 mm)和雜質由篩孔下落,滿足要求的貝苗經過渡圓孔區域由進料口落入精選抽標箱。
3.2 貝苗活性識別與初級排隊裝置
貝苗活性識別與初級排隊裝置(如圖6所示),主要由投貝槽、可調節出貝口、初級排隊導板和振動電機等組成。其中,投貝槽的尺寸為340 mm×260 mm×130 mm,最大容量為500只貝苗(與實際貝苗規格識別與計數最大量一致),滿足海上貝苗規格識別與計數作業需求;振動電機的參數為電壓220 V、電流0.36 A、額定轉速2 100 r/min、振動頻率40 Hz,利用扇貝苗的應激閉口特性,調整振動電機轉速控制裝置的振幅,刺激活性好的貝苗閉口,活性差或死貝苗開口,識別優質苗種;貝苗傳送過程中始終處于閉口狀態,減輕貝苗在傳送過程中的互插現象;可調節出料口的作用是控制單位時間內的出苗數量,降低貝苗并排和堆疊傳輸。因此,出料口的尺寸由貝苗的外殼尺寸和振動篩振幅確定。由于被檢測貝苗的尺寸范圍為25~40 mm(與實際生產一致),通過測試,當可調節出口的寬度為40~60 mm(設定依據為最大規格貝苗的殼高≤出口寬度<最大與最小規格貝苗殼高之和),可有效減輕貝苗并排傳輸;出料口的高度需考慮貝苗外殼的厚度和振動篩振幅。為此,本文對貝苗在振動篩面上的運動過程進行分析,如圖7所示。
根據高頻振動篩動力學分析[25-27],篩網工作時篩箱的最大加速度為Aω2。貝苗在振動篩上的力學方程為
式中A為篩面的振幅,m;ω為篩面激振器不平衡塊的回轉角速度,rad/s;n為振動電機轉速,r/min;φ為篩面激振器軸回轉相位角,rad,φ=ωt。
振動篩工作時,貝苗脫離篩面被拋起的條件是貝苗對篩面的正壓力為0,即N=0。公式(6)可簡化為
由公式(8)可知,若篩面的傾角α和貝苗的拋射角β已知,通過調節篩面激振器不平衡塊的回轉角速度ω(即調節振動電機轉速n),可確定振動篩振幅范圍。
當振動電機轉速為額定轉速的70%(即1 470 r/min)、篩面傾角α=0 °、貝苗拋射角0°<β<90°、拋擲指數取Kv=3.3時,振動篩振幅約1~8 mm。結合貝苗殼厚約為3~5 mm(貝殼附著有石灰蟲等),確定可調節出口的高度約為15~25 mm。振動篩上設置有初級排隊導板限制貝苗在振動篩的運行軌跡,當限定寬度范圍為50~60 mm時,可進一步避免貝苗的并列傳送,確保貝苗逐只落入差速排隊傳送裝置中。
3.3 貝苗差速排隊與下落姿態控制裝置
貝苗差速排隊與下落姿態控制裝置(如圖8所示)主要由波紋板差速排隊傳送裝置和貝苗下落導向機構組成。其中差速排隊傳送裝置主要由波紋排隊擋板、同步齒輪傳送帶及交流電機等組成。可調節波紋排隊擋板共計3個,分別與傳送帶運動方向的夾角分別為45°、30°和30°;貝苗垂直下落導向機構主要由固定框架、凹型擋板(依據扇貝外殼形狀設計)等組成,圖9為貝苗在下落導向機構作用下的運動狀態,貝苗離開傳送帶后做平拋運動,觸碰下落導向機構后,貝苗姿態調整為垂直自由落體運動狀態,確保了貝苗規格識別的準確性。
貝苗在差速排隊裝置上的運動情況,如圖10所示。貝苗在傳送帶摩擦力F的作用下運動,當貝苗碰觸波紋擋板1后,力F分解為平行于波紋擋板1滑動力F1,和垂直于波紋擋板1的壓力N1,波紋擋板摩擦系數為μ,貝苗受到波紋擋板1的摩擦力為f1。各力計算公式為
滑動力F1和摩擦力f1產生的力偶矩M1計算公式為
當貝苗碰觸波紋擋板2后,力F分解為平行于波紋擋板2滑動力F2和垂直于波紋擋板2的壓力N2,貝苗受到波紋擋板1的摩擦力為f2,其計算公式為
滑動力F2和摩擦力f2產生的力偶矩M2計算公式為
通過受力分析可知,當貝苗碰觸波紋擋板1產生的力偶矩M1大于貝苗碰觸波紋擋板2產生的力偶矩M2,產生的滑動力F1小于F2,貝苗在波紋擋板1區域處于高速回轉降速傳輸,在波紋擋板2區域處于低速回轉加速傳輸。因此,貝苗在波紋擋板作用下實現差速運動,并通過回轉避免貝苗的堆疊,在傳送過程中相鄰貝苗間距逐漸增大,貝苗逐只進入傳感器。
4 裝置性能試驗
4.1 試驗材料
試驗用扇貝苗選自山東長山島海區,結合底播貝苗規格要求,試驗用貝苗殼高為20~40 mm。貝苗規格識別與計數裝置1臺,如圖11所示;游標卡尺若干。
4.2 試驗方法
為驗證系統的適用性和可靠性,對樣機進行了試驗。首先進行正交試驗,研究各參數對貝苗規格識別與計數準確性的影響,確定最佳參數;根據正交試驗結果進行生產實測,進一步驗證系統的穩定性與準確性。
結合文獻[11-12],系統的識別與計數準確性主要與貝苗的投入量、排隊擋板位置、傳送帶電機轉速、下落導向機構與傳送帶水平間距、傳感器與傳送帶垂直間距、系統設定的貝苗下落時間等因素有關。其中,貝苗投入量主要取決于貝苗活性識別與初級排隊裝置中振動電機轉速、可調節出料口尺寸和初級排隊導板限寬。通過試驗調試,當振動電機轉速為70%額定轉速(1 470 r/min)、振動篩可調節出料口尺寸的寬和高為50和20 mm、初級排隊導板限寬為55 mm時,貝苗逐只落入差速排隊傳送裝置;結合文獻[11-12],差速排隊擋板的夾角為45°和30°時貝苗排隊效果最佳,傳動裝置線速度為0.4~0.7 m/s時,計數準確性最佳。由2.2節可知,傳感器與傳送帶的相對位置影響識別精度,傳感器與貝苗下落點的距離越近,識別精度越高。受傳送帶厚度影響,傳感器距離貝苗下落點的最小距離為5 cm。因此,最終確定影響貝苗規格識別與計數準確性的因素為下落導向機構與傳送帶的水平間距、傳送裝置的線速度和設定的貝苗垂直通過傳感器的時間。根據單因素試驗確定上述影響因素的范圍分別為15~30 mm、0.4~0.7 m/s、15~30 ms。
取25~29.9和30~40 mm大小的貝苗各100枚。進行三因素四水平正交試驗,試驗因素水平如表1所示。

表1 正交試驗因素水平Table 1 Factors and levels of orthogonal experimental
生產試驗:海上生產試驗在山東長島海區收苗活水船上進行。試驗歷時15 d(2019年10月16日至10月30日),共進行24組,每組檢測貝苗數量與生產一致,每組試驗重復3次。
人工識別與計數:每組配備作業人員5人,其中1人負責記錄(記錄檢測貝苗總數量、30 mm及以上規格貝苗的數量、每組作業時間)、4人利用游標卡尺對貝苗進行測量與計數;利用所設計的裝置對人工統計的同一批貝苗進行再次規格識別與計數,配備工作人員1人,負責將貝苗倒入裝置中,并記錄每次作業時間,統計數據由打印機輸出。每次試驗完成后,統計機械規格識別與計數相對于人工作業的識別精度(貝苗規格識別精度用識別偏差率η1表示)和作業效率η2,計算公式如下:
式中Njx為機械裝置測得的貝苗各規格的數量;Nrg為人工利用游標卡尺測得的貝苗各規格的數量;Ncb為每次檢測的貝苗數量;tc為平均作業時間,min;n為作業人數。
4.3 結果與分析
4.3.1 最佳工藝參數確定
根據試驗因素水平表,利用SPSS20軟件對正交試驗進行極差分析,試驗結果和極差分析結果如表2。
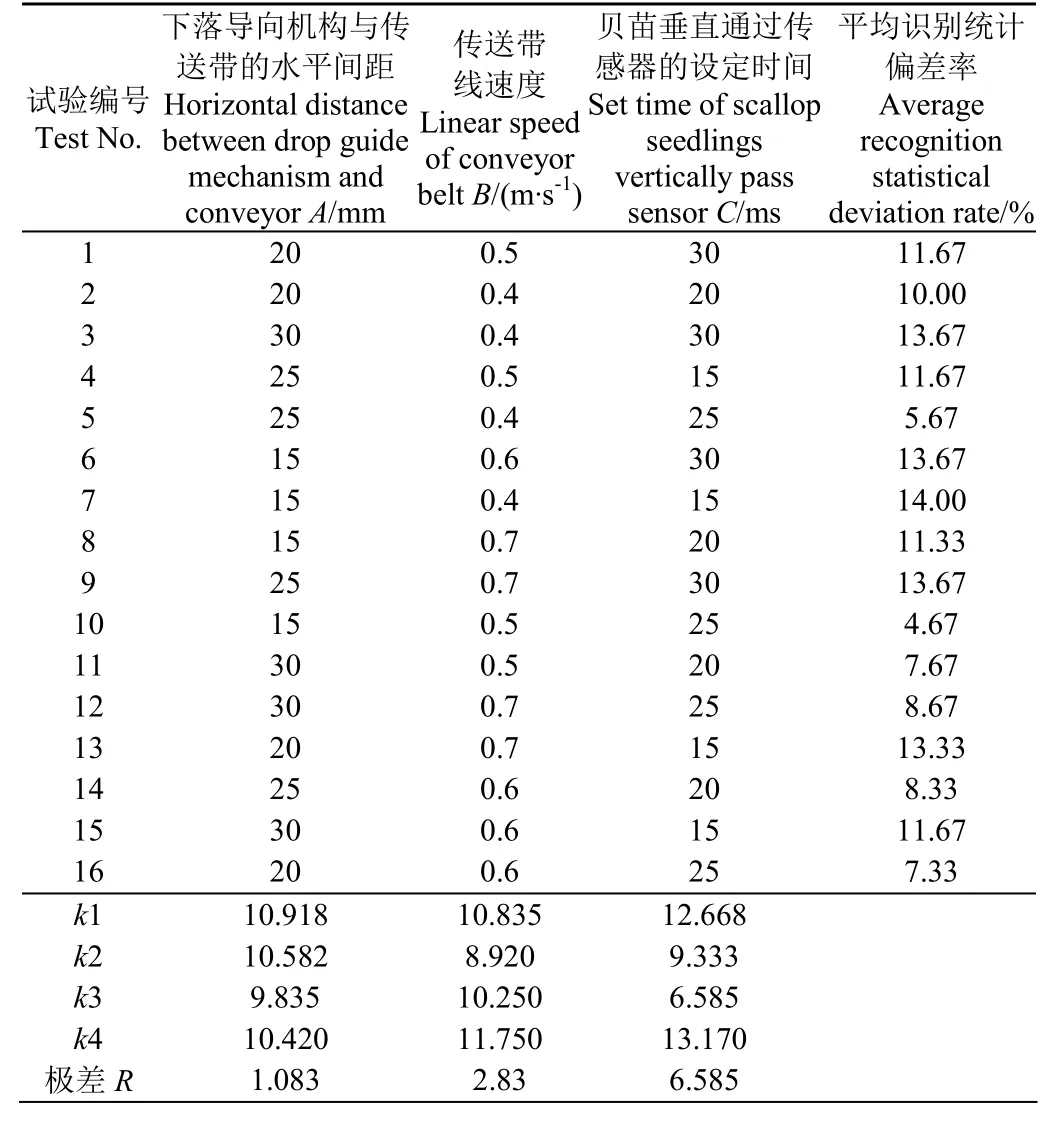
表2 貝苗規格識別正交試驗方案與結果Table 2 Orthogonal test scheme and results of specification identification of scallop seedlings
由表2可知,最佳工藝參數組合為A3B2C3,即下落導向機構與傳送帶的水平間距25 mm,傳送裝置的線速度0.5 m/s,識別系統設定的樣本貝苗垂直通過傳感器的時間25 ms;各因素對貝苗平均識別統計偏差率影響大小的順序依次為設定的貝苗垂直通過傳感器的時間C、傳送裝置的線速度B和下落導向機構與傳送帶的水平間距A。
4.3.2 驗證試驗
為驗證最佳工藝組合的合理性,在貝苗規格識別最佳工藝參數組合A3B2C3作3組驗證試驗,每組重復3次,結果見表3。由表3可知,貝苗規格識別的偏差率平均值為3.72%均低于目前已作的規格識別工藝參數的最低偏差率4.67%,說明正交試驗優選的作業參數合理。
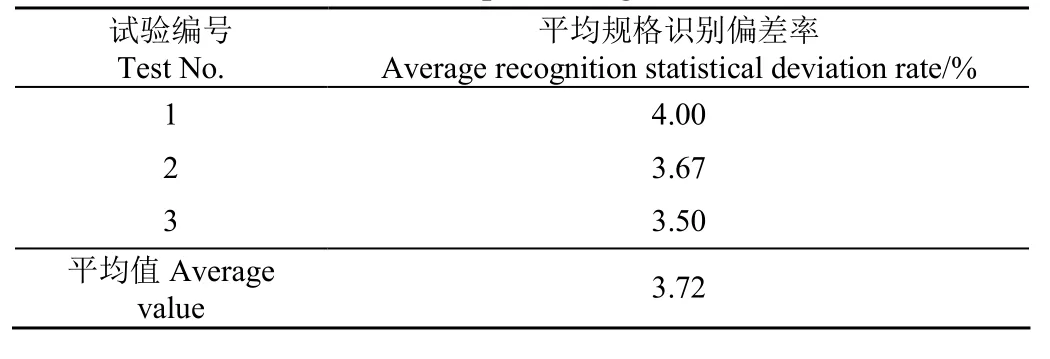
表3 貝苗規格識別驗證試驗結果Table 3 Verification test results of specification identification of scallop seedlings
4.3.3 對比試驗
海上生產對比試驗的貝苗規格識別與計數裝置的結構參數分別為:活體識別與初級排隊裝置的振動電機轉速為1 470 r/min、可調節出料口的寬和高分別50和20 mm、初級排隊導板限寬為55 mm;傳送裝置中波紋排隊擋板與貝苗傳送方向的夾角分別為45°和30°、傳送帶線速度為0.5 m/s;傳感器與傳送裝置的垂直間距50 mm、導向機構與傳送裝置的水平間距25 mm;系統設定的貝苗垂直通過傳感器的時間25 ms。試驗結果如表4所示。
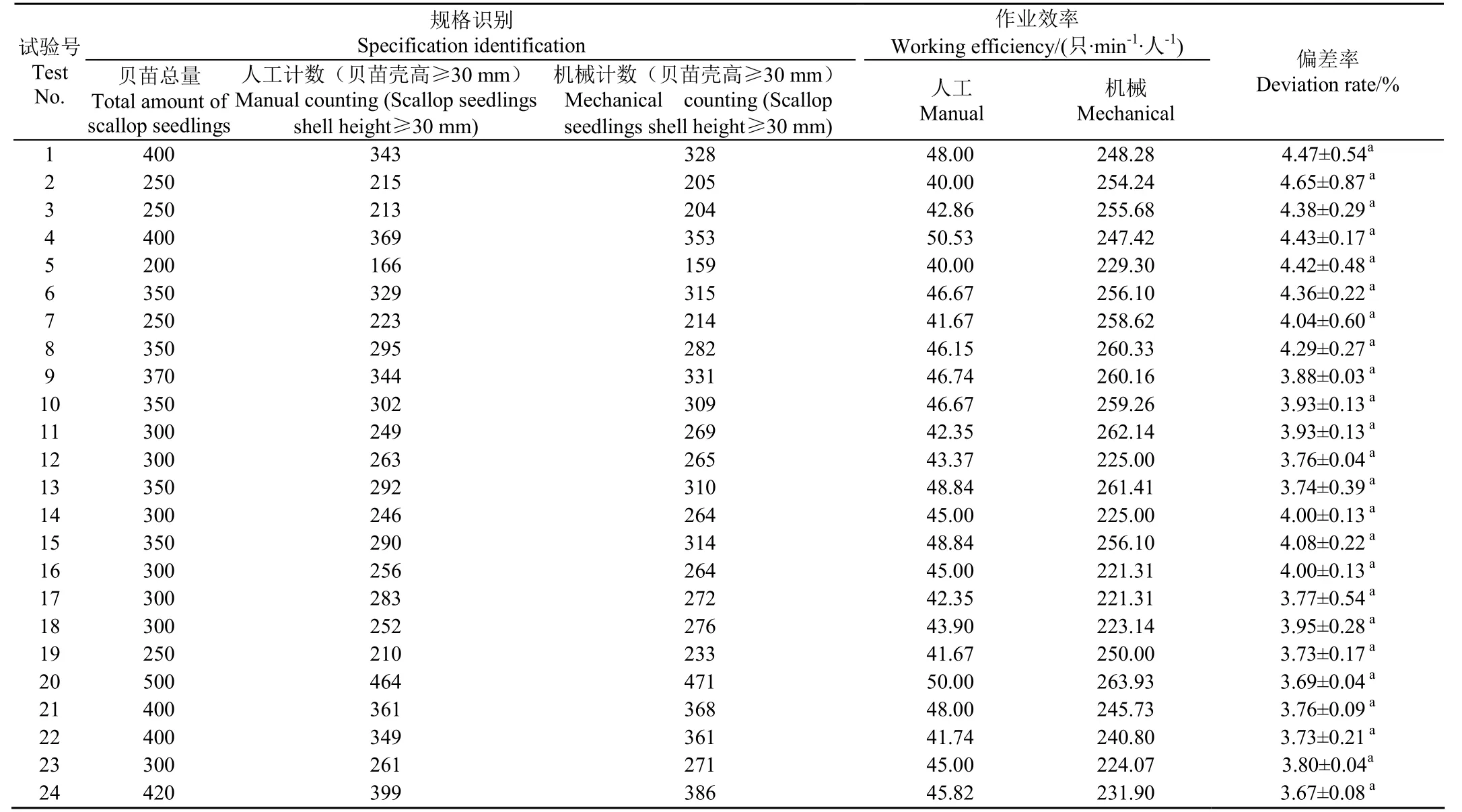
表4 人工與機械識別與計數試驗效果對比Table 4 Effect comparison for specification identification and counting of manual and mechanical
由表4可知,機械計數結果小于人工計數結果,偏差率為3.67%~4.65%,平均偏差率為4.02%;機械規格識別與計數偏差率與人工識別偏差率無顯著性差異(P>0.05)。課題組前期結合國內扇貝底播增殖作業需求,設計了篩網式扇貝苗分級計數裝置[11-12],該裝置的貝苗規格識別與計數偏差率約為4.465%,作業效率約為180只/(min·人)。優化后的貝苗規格識別與計數裝置較篩網式扇貝苗分級計數裝置的統計偏差率[11]降低了約0.445%。由此說明該貝苗規格識別與計數統計裝置具有較高的準確性和較好的穩定性。
由表4還可知,人工完成貝苗規格識別與計數的作業效率為45.05只/(min·人),機械規格識別與計數的作業效率為345.05只/(min·人),約為人工作業效率的5.44倍,篩網式扇貝苗分級計數裝置提高了0.92倍。說明該裝置具有較高的作業效率,符合扇貝苗底播增殖產業發展需求。
5 討 論
劉群華等[21-24]研究表明,測距誤差主要與被測物體的不規則性和運動不規則性有關。本研究通過生產性對比試驗得出,機械裝置統計出的殼高30 mm及以上貝苗數量小于人工方式,其偏差率范圍為3.67%~4.65%,平均偏差率為4.02%,且機械裝置統計偏差率與人工統計偏差率無顯著性差異(P>0.05)。其主要原因是,貝苗形狀的不規則性和運動不規則性(非垂直光電傳感器光幕下落)造成光電傳感器產生測量誤差。雖在下落導板的作用下大部分貝苗能夠垂直通過傳感器,但仍有部分貝苗非垂直狀態通過傳感器,導致貝苗規格識別偏小。鄭關超等[28-29]研究表明貝苗的殼高和殼長是影響體質量的主要因素。由于扇貝苗體質量非均勻分布[30],在垂直下落過程中,貝苗存在按照一定角度下落的趨勢,故識別偏差率相對穩定,機械規格識別與計數偏差率與人工無顯著性差異(P>0.05)。
文獻[11]采用平板篩網對貝苗進行分級,之后人工將分級后的貝苗投入計數裝置,進行計數統計。因此,同批檢測的貝苗需要先后完成分級與計數2次操作,嚴重影響作業效率,增加了貝苗干露死亡的風險。沈建等[31]研究表明,貝類在篩網分級過程中易發生沖撞摩擦、篩孔卡貝及貝苗損傷等問題,影響貝苗分級效率與貝苗成活率。因此,本文提出基于光電傳感技術實現貝苗規格識別與計數的同步檢測,消除篩網分級過程中的卡貝傷貝等問題,減輕貝苗干露現象。通過生產對比試驗,優化后的貝苗規格識別與計數裝置較篩網式扇貝苗分級計數裝置的統計偏差率降低了約0.445%,因此,該技術可替代篩網進行貝苗規格識別;同時優化后的貝苗規格識別與計數裝置的作業效率較人工作業提高了5.44倍,較篩網式扇貝苗分級計數裝置提高了0.92倍,作業效率提高顯著,降低了貝苗干露風險。
6 結 論
1)通過對貝苗規格識別與計數裝置工藝參數的優化與驗證,下落導向機構與傳送帶的水平間距25 mm,傳送裝置的線速度0.5 m/s,識別系統設定的樣本貝苗垂直通過傳感器的時間25 ms時,貝苗規格識別與計數準確性最佳,且各因素對貝苗平均識別統計偏差率影響順序依次為:貝苗垂直通過傳感器的設定時間、傳送裝置的線速度、下落導向機構與傳送帶的水平間距。
2)在山東長島海區收苗活水船上的海上生產對比試驗得出,機械規格識別與計數數量小于人工方式,其偏差率范圍為3.67%~4.65%,平均偏差率為4.02%,機械規格識別與計數偏差率與人工識別偏差率無顯著性差異(P>0.05);與優化前的篩網式扇貝苗分級計數裝置相比,統計偏差率降低了約0.445%。由此說明優化后的貝苗規格識別與計數裝置具有較好的準確性與穩定性。
3)通過對優化后的貝苗規格識別與計數裝置與人工統計和優化前的篩網式扇貝苗分級計數裝置作業效率的對比分析得出,優化后的貝苗規格識別與計數裝置較人工作業提高了5.44倍,較篩網式扇貝苗分級計數裝置作業效率提高了0.92倍。由此說明,該裝置具有較高的作業效率,符合扇貝苗底播增殖產業發展需求。
