采用滑轉率-阻力區間劃分法的拖拉機雙流傳動系統調速控制
2021-04-15 09:56:30唐希雯汪韶杰孫保群
農業工程學報 2021年3期
夏 光,夏 巖,唐希雯,高 軍,汪韶杰,孫保群
(1. 合肥工業大學汽車工程技術研究院,合肥 230009; 2. 國防科技大學電子對抗學院,合肥 230009;3. 合肥工業大學汽車與交通工程學院,合肥 230009)
0 引 言
拖拉機作業時農機手會根據作業種類選擇合適的機械擋位,并將車速維持在該作業類型推薦高效作業車速區間的上限值,以保證作業機組具有最高的生產效率[1-2],但受土壤質地[3]等因素的影響,拖拉機作業阻力會頻繁發生波動,致使拖拉機作業車速發生變化,一旦車速脫離高效車速區間內,拖拉機的作業效率就會降低。目前,國外發達國家的拖拉機產品上已普遍采用了動力換擋變速傳動、靜液壓變速傳動和液壓-機械雙流無級變速傳動技術[4-6]。這些技術的應用大幅度提升了拖拉機的傳動效率。
拖拉機的作業效率主要受作業阻力、滑轉率、發動機功率、作業車速、幅寬、工作時間等因素的影響。在發動機功率選定的情況下,其作業效率主要取決于工作阻力、滑轉率和作業車速的大小。過高的作業車速會降低拖拉機的作業質量,過低的作業車速則會浪費拖拉機的生產能力。作業阻力越大,生產效率越低。當作業阻力發生波動需要對拖拉機進行調速控制以使其保持高效車速[7]。而在調速過程中,滑轉率會對拖拉機生產效率產生一定的影響:過大的滑轉率一方面會影響拖拉機牽引力的發揮,浪費發動機的動力;另一方面車輪過度滑轉會破壞土壤結構并造成輪胎自身的磨損加劇,降低工作效率。
Tanaka等[8]以油門開度、發動機轉速與馬達轉速為控制參數,提出一種液壓機械傳動(Hydraulic Mechanical Transmission, HMT)控制方法;Yang等[9-10]通過對換擋過程中離合器油壓控制策略的研究,提出能夠避免功率循環、降低換擋沖擊的離合器控制策略;Murrenhoff等[11-12]提出了一種發動機與液壓機械無級變速器(Hydraulic Mechanical Continuously Variable Transmission, HMCVT)協調控制策略,發現了發動機與液壓調速裝置的參數匹配會對HMCVT系統的傳動效率產生較大影響。魏超等[13]通過試驗臺架對某HMCVT系統的速比跟蹤系統對發動機轉速調節的影響進行了研究。張明柱等[14-15]基于整機效率最大化原則確定了在任意牽引力及相應目標車速條件下的HMCVT最優變速比。鮑明喜等[15]在分析了影響拖拉機燃油經濟性因素后,提出使拖拉機具有最低燃油消耗率的同時具備最高牽引效率的經濟性換擋規律。Ahn等[16]得到了HMCVT系統的一個最佳工作線,并在此基礎上提出了一種發動機-液力-機械綜合傳動控制算法。Xiao等[17]建立了典型法和快速法2種辨識方法來研究HMCVT系統的特性并得出快速法適用于進一步設計的結論。
以上研究多集中在HMCVT系統的傳動效率特性、如何提高換段過程的換段品質以及燃油經濟性變速規律等方面,而對于裝備有HMCVT系統的拖拉機在作業過程中遇到阻力波動后如何進行調速控制以維持機組較高的生產效率卻未見相關文獻報道。本文以自主開發設計的HMCVT系統為研究對象,在介紹HMCVT系統機械結構和傳動原理的基礎上,通過對滑轉率進行區間劃分確定滑轉率控制和車速控制的優先級。在執行車速控制時,通過對作業阻力進行范圍劃分確定HMT和HST傳動模式下的排量比調節曲面。提出基于前饋補償的滑模控制算法。搭建HMCVT傳動系統和調速策略模型,并通過實車試驗進行驗證。
1 液壓機械無級變速器
1.1 系統結構
本文研究的液壓機械無級變速器系統的組成模塊包括前端模塊、中段機械定速比變速傳動模塊與轉向模塊組合以及后段驅動橋模塊。前端模塊的結構組成如圖1所示,它是HMCVT系統的核心模塊,可以實現靜液壓傳動、液壓機械傳動和準機械傳動3種不同傳動模式,如表1所示。
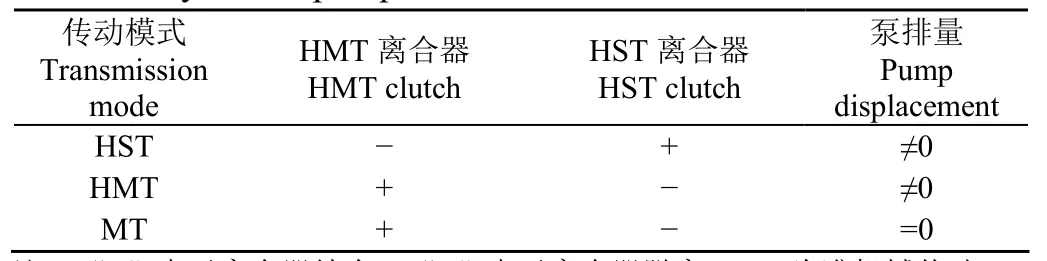
表1 不同傳動模式下離合器接合狀態以及液壓泵排量大小Table 1 Engagement state of clutches and the displacement of the hydraulic pump in different transmission modes
1)HST模式
通過接合HST離合器L2,斷開HMT離合器L1,系統可以切換至HST模式。在該傳動模式下車輛直線行駛時,來自發動機的動力依次經過:動力輸入軸I→齒輪1→齒輪2→液壓泵P1→液壓馬達M1→匯流軸III→太陽輪(行星架)→齒圈→齒輪5→機械定速比模塊→后段驅動橋模塊。
2)MT模式
通過接合HMT離合器L1,斷開HST離合器L2,同時鎖止液壓馬達,系統可以切換至純機械傳動模式。動力依次經過:動力輸入軸I→齒輪1→分動軸II→齒輪3→齒輪4(行星架)→齒圈→齒輪5→機械定速比模塊→后段驅動橋模塊。
3)HMT模式
通過接合HMT離合器L1,斷開HST離合器L2,同時調整液壓泵的排量不為0,系統可以切換至液壓機械雙流傳動模式。在該傳動模式下車輛直線行駛時,來自發動機的動力依次經過:動力輸入軸I→齒輪1→齒輪2→分動軸II,經由分動軸II動力分為液壓傳動路和機械傳動路兩個支路。其中,液壓傳動路的動力路徑依次為:齒輪2→液壓泵P1→液壓馬達M1→匯流軸III→太陽輪;機械傳動路的動力路徑依次為:分動軸II→齒輪3→齒輪4(行星架)。來自液壓支路的功率與來自機械支路的功率通過匯流行星輪系進行匯合,匯合后的功率經過行星輪系的齒圈對外輸出,其動力路徑依次為:齒圈→齒輪5→機械定速比模塊→后段驅動橋模塊。
1.2 系統傳動效率
當傳動系統處于HMT傳動模式時,液壓路功率占比ρh為[18]
式中i1為靜壓傳動輸入齒輪副傳動比;i2為靜壓傳動輸出齒輪副傳動比;i3為分動軸與匯流軸輸入齒輪副傳動比;e為液壓泵—馬達排量比;K為匯流行星輪系特性參數。
由于功率循環會給系統輸出功率帶來損失,增加零部件的受力,因此本文僅分析無液壓路功率循環時HMT模塊的傳動效率[19]。
液壓泵總的工作效率ηp為式中Cs為層流泄漏系數(取標準值8×10-10);Cd為液壓油的層流阻力系數(取標準值0.2×105);Cf為機械阻力系數(取標準值0.01);P為液壓系統的工作壓力,Pa;np為液壓泵轉速,r/min;μ為液壓油動力黏度(取
53.5×10-3Pa·s)。
液壓馬達的效率ηm為
式中nm為液壓馬達轉速,r/min。
液壓傳動路總的效率ηH為
HMT模塊傳動效率ηHMT為
由式(5)知,HMT模塊傳動效率受液壓系統工作壓力P、液壓泵轉速np以及液壓泵—馬達排量比e的影響。
2 拖拉機調速策略及最高生產率變速規律
根據拖拉機在某作業土壤下的牽引效率ηT曲線、滑轉率曲線與驅動輪驅動力之間的關系[20]可知,拖拉機的牽引效率會隨滑轉率的變化而發生變化,并且牽引效率存在一個峰值,即最高牽引效率ηTmax,此峰值所對應的驅動輪滑轉率稱為最優滑轉率δB。因此引入滑轉率δ,容許滑轉率區間δmin≤δ≤δmax、高效滑轉率區間δA≤δ≤δC、最大允許滑轉率δmax和最優滑轉率δB的概念,相互之間的關系如圖2所示。
實際工作中,在不同路面條件下滑轉率的閾值一般可由不同土壤條件下的行業經驗值給定。具體的閾值可以根據拖拉機的類型按照國標GB/T 3871.9-2006[20]以及《拖拉機理論》[21]進行確定,如表2所示
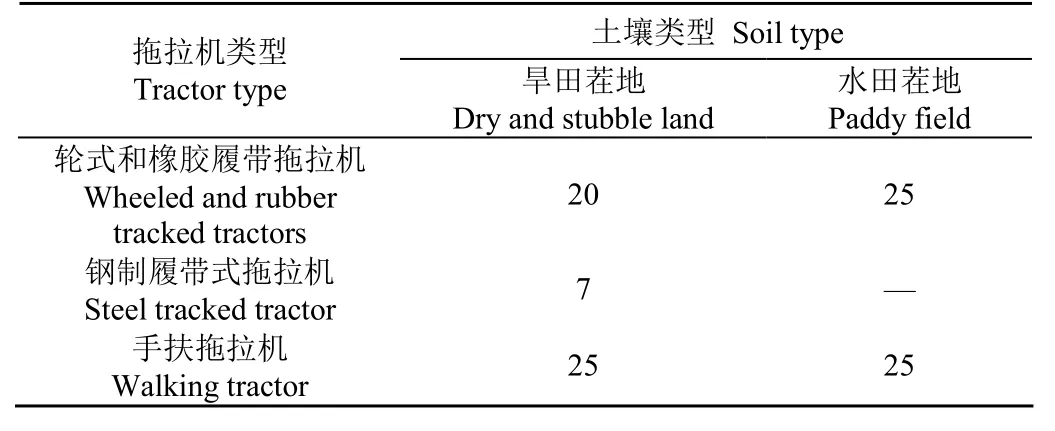
表2 不同土壤類型的拖拉機最大允許滑轉率Table 2 Maximum allowable slip rate of tractors for different soil types %
為使驅動輪滑轉率在閾值范圍內工作,其大小的調節一般通過對作業阻力的大小進行調整控制,比如當拖拉機進行犁耕作業,若犁耕阻力過大超出當前土壤條件下所能提供的附著力時應適當提升犁具高度以減小作業阻力;當拖拉機收割作業阻力過大時應適當減小收割機具的幅寬使得部分機具幅寬處于無負載工作的狀態以減小作業阻力。
2.1 拖拉機調速控制策略
通過對滑轉率進行區間劃分,在不同的滑轉率區間內分別制定以拖拉機生產效率最高為第一優先級和以保證拖拉機通過性為第一優先級的調速控制策略[22],具體為若滑轉率處于容許滑轉率區間內,則以保證拖拉機的生產效率為第一優先級,執行變速控制策略;若滑轉率超過最大允許滑轉率時,則以保證通過性為第一優先級,執行滑轉率控制策略,避免因驅動輪打滑過度而出現陷車無法移動的嚴重后果。拖拉機調速控制示意圖如圖3所示。
2.2 最高生產率變速規律
結合拖拉機的作業特性以及HMCVT系統各個傳動模式的優劣勢,本文根據拖拉機作業阻力的大小對HMCVT系統各個傳動模式切換的控制策略如下:
1)當作業阻力處于穩定狀態時,控制HMCVT處于MT傳動模式以保證最高的傳動效率;
2)當作業阻力在小范圍內波動時,依舊保持在MT模式下利用發動機的后備功率來克服阻力的波動;
3)當作業阻力在較大范圍內波動時,將HMCVT切換至HMT模式下,通過發動機與液壓泵的聯合控制來克服阻力的波動;
4)當作業阻力在大范圍內波動時,將HMCVT切換至HST模式下,利用純液壓傳動的高功率密度來克服阻力的波動。
拖拉機作業過程中作業阻力的變化以及大小可以用整車的加速度反映。以某類型作業(假定該作業類型推薦的高效作業車速區間為v1≤v≤v2)處于作業阻力增大(加速度為絕對值)時為例,對加速度大小進行分級并確定相匹配的傳動模式如表3所示。表3中加速度閾值a1和a2可通過實車標定的方法確定,v1和v2通常采用行業經驗值。本文的研究重點是當拖拉機作業阻力發生大范圍波動情況下的控制策略,故以下僅分析HMT和HST傳動模式下的變速規律。對于應用在阻力穩定的作業工況下的MT模式的變速規律,本文不作說明。
2.2.1 HMT傳動模式變速規律
當拖拉機作業阻力在較大范圍內發生波動時,HMCVT系統切換至能夠無級變速的HMT傳動模式,依靠對柴油機油門開度和液壓泵排量的控制來調節車速。以拖拉機最高生產效率為調速控制目標時,在作業阻力增大后希望車速能夠在最短的時間內盡可能恢復至原先車速值即增速過程中希望加速度盡可能的大。本文針對裝有HMCVT系統的拖拉機提出一種定油門開度下HMT最佳動力性變速規律。

表3 作業阻力與傳動模式Table 3 Working resistance and transmission mode
車輛行走機構的效率ηx定義為[23]
式中Ptire-out為車輪輸出功率,kW;Ptire-in為車輪輸入功率,kW;ηδ為拖拉機的滑轉效率,可轉化為拖拉機實際車速與理論車速的比值;ηf為拖拉機的滾動效率,其值取決于滾動阻力及驅動力的大小。通常而言,拖拉機在一定作業環境下的滾動阻力可近似的認為是一個定值,因此,當驅動力保持不變的時候可以認為拖拉機的滾動效率也是一個定值。
實際驅動拖拉機行駛的驅動功率為
式中P驅為拖拉機的驅動功率,kW;Pe為柴油機輸出功率,
kW。
柴油機輸出功率為式中Te為柴油機輸出扭矩,N·m;nin為柴油機轉速, r/min。
HMT傳動模式下柴油機轉速與車速之間的關系,即
式中ix指前端模塊后串聯的機械檔位、高低擋以及減速器的速比之和;r為履帶輪節圓半徑,m。
對YC4DK-58.8型柴油機的輸出扭矩與油門開度和轉速之間的關系的臺架試驗數據進行插值處理后通過查表法可以獲取任一油門開度與轉速下的柴油機輸出扭矩Te,即
式中φ為油門開度,%。
聯立式(6)~(10)可得拖拉機驅動功率為
因此,拖拉機的驅動功率的大小可以表示為關于油門開度φ、拖拉機車速v、液壓泵—馬達排量比e和液壓系統工作壓力P的函數關系即
綜上所述,HMT模式下最佳動力性變速規律制定問題就轉化為在一定外界負載、一定拖拉機車速和油門開度下,如何匹配液壓泵—馬達排量比以保證最大的驅動功率P驅max。通過遍歷循環尋優的計算方法[24],即首先將車速固定為某一具體值,然后通過不斷改變負載數值來尋求最大功率點所對應的發動機轉速和液壓泵—馬達排量比,最后改變車速并重復上述步驟即可得到HMT模式下最佳動力性變速規律所對應的調節參數。
2.2.2 HST傳動模式變速規律
當拖拉機作業阻力在大范圍內發生波動時,HMCVT系統切換至高功率密度的HST傳動模式,依靠對柴油機油門開度和液壓泵排量的調節來調節車速。HST模式下的調速控制策略與HMT相似,區別在于傳動系統的傳動效率存在差別[25]。HST傳動模式是適用于大阻力波動情況下的傳動方案,以100%油門開度為例,對HST傳動模式下驅動功率進行計算
1)柴油機轉速與車速之間的關系
式中i0為分動齒輪副傳動比;i后段為后段驅動橋模塊傳動比。
2)傳動系統效率
由1.2節傳動效率的分析可知,HST模式下的傳動效率的計算公式同式(4)。
3)驅動功率將式(8)、式(10)、式(14)~式(16)聯立可得
與HMT模式下最佳動力性排量比變化規律的計算方法一樣,HST模式下的最佳動力性排量比變化規律也采用遍歷尋優的計算方法。在變量約束條件上,HST傳動模式下的排量比變化范圍要小于HMT模式下的變化范圍,即
圖4為HMT/HST模式下排量比控制規律圖。其中,圖4a、4b分別為柴油機油門開度為90%和100%時HMT/HST傳動模式下最高生產效率的排量比調節控制規律。
3 基于前饋補償滑模控制的泵排量控制
在HMT/HST模式下,當拖拉機作業負載波動時,泵控馬達系統的油液工作壓力會隨之波動。由于油壓的波動會反向導致變量泵的斜盤傾角發生變化,從而使泵排量發生變化。故本文提出了一種基于前饋補償滑模控制的方法,變排量液壓泵的排量調節機構簡圖如圖5所示。排量調節機構主要由油缸位置傳感器、信號放大器、比例電磁閥、液壓油缸以及斜盤組成。
3.1 系統數學模型及傳遞函數
油缸活塞位移x與斜盤傾角和力臂的關系為
式中α為斜盤傾角,rad;L為油缸施力點至斜盤鉸接點的力臂,m。
電磁閥閥芯位移xL對控制電流I的傳遞函數Gv(s)為[26]
式中ωh為比例閥控缸環節的固有角頻率,rad/s;無因次阻尼比;Kh為放大系數。
液壓伺服系統中,比例閥的固有頻率通常遠高于液壓缸的固有頻率,此時,可以將比例閥簡化為比例環節[27]。
信號放大器的數學模型為
式中I為控制電流,A;U為兩端電壓,V。
3.2 控制器設計
泵排量調節系統的整體控制框圖如圖6所示。系統整體傳遞函數G(s)為
式中Kq為比例閥流量放大系數;KI為電流放大系數;ω為液壓系統固有頻率,Hz;ζ為系統阻尼比;A為活塞受力面積,m2。
經推導可得泵排量調節系統的滑模控制律u1為:
根據前饋補償的原理可得:
由式(22)可知前饋補償模塊傳遞函數B(s)為:
因此,u2=FLB(s)。綜上所述,總的控制信號u=u1+u2。
3.3 仿真分析
在Matlab/Simulink中分別搭建滑模控制器、比例-積分-微分(Proportion-Integral-Derivative, PID)控制器以及斜盤傾角仿真模型。取期望信號為3sin(πt)+1,仿真時間設置為5 s[28]。仿真結果如圖7所示。
由圖7a可知,傳統PID算法在控制過程中存在超調現象而滑模算法無超調現象;當達到穩定狀態后,兩種控制算法都能夠很好的跟隨期望信號。由圖7b可知,本文滑模算法的誤差波動較小,對期望信號的跟蹤穩定性優于傳統PID控制算法。
取干擾信號為10sin(π/2t)+1,比較滑模控制算法在施加前饋補償前后的跟蹤效果,仿真結果如圖8所示:
由圖8可知,無補償模塊時,在外界負載干擾下,控制系統無法準確跟隨期望信號,系統誤差較大且呈現不穩定的變化狀態;當添加前饋補償模塊后,系統能夠很精準的跟隨期望信號進行變動,誤差穩定且趨近于零。
4 控制策略有效性驗證
為驗證基于滑轉率區間劃分拖拉機調速控制策略的有效性,利用AMESim和MATLAB建立聯合仿真模型。
4.1 滑轉率區間劃分仿真
設定整個仿真時間為20 s,仿真步長為0.01 s;拖拉機作業時土壤比阻的穩定值為25 000 N/m2,在仿真開始后,設定土壤比阻在穩定的25 000 N/m2基礎上出現周期為10 s,幅值為5 000 N/m2的以正弦規律變化擾動[21]。
圖9為拖拉機作業阻力變動過程中驅動輪滑轉率在進行區間劃分控制和無控制2種情況下的變化規律。由圖9可知,在土壤的比阻躍升的過程中,若不對滑轉率進行控制,則滑轉率會迅速超出最大容許滑轉率閾值,導致作業效率的急劇下降;當對滑轉率進行控制時,滑轉率會被限制在規定的容許區間內并隨著作業阻力的波動而發生變化。
4.2 拖拉機最高生產率變速規律仿真
為驗證以最高生產效率為目標的變速規律的有效性,利用AMESim和MATLAB聯合仿真模型進行如下仿真試驗:設定整個仿真時間為8 s,仿真步長為0.01 s;在t=0~3 s時間段內,拖拉機在空載狀態下開始起步,柴油機油門開度由0增至40%,直至起步完成,進入勻速運動狀態;當t=3 s時出現線性增大的作業阻力;當t=4 s時作業阻力增至峰值7.5 kN處,并在4~8 s時間段內保持不變,調速策略在t=6 s時介入控制[29]。仿真結果如圖10所示。
由圖10a和10b可知,當車輛遇大阻力,在t=6 s時進行調速控制,車輛相比于無控制能獲得更高的傳動比,即更大的扭矩,車輛的加速性能更好。
如圖10c所示。拖拉機在t=0~2 s時處于加速狀態;在t=2 s達到車速峰值5 km/h;在t=2~3 s時處于勻速狀態;在t=3 s后由于作業阻力的增大,車速開始下降。假定區間上限值vmax=5 km/h,t=6 s時的拖拉機車速為區間的下限值vmin,即此時應進行調速控制。由圖10c可知,當采用最高生產效率變速規律時,拖拉機車速在t=7 s左右便已經提升至區間上限值vmax,當采用傳統動力性變速規律時,拖拉機車速在t=8 s時仍未達到上限值,無調節控制下的拖拉機車速在t=3~8 s內持續下降。
如圖10d所示。在t=0~0.5 s時拖拉機加速度在急劇增至峰值后保持不變,拖拉機處于勻加速狀態;在t=1~3 s時拖拉機加速度逐步下降至0,拖拉機車速升至峰值后保持勻速狀態;在t=3~4 s時在波動阻力的作用下,拖拉機加速度為負值,拖拉機車速下降;t=4 s后作業阻力達到峰值并維持不變,此時在發動機調速特性作用下,拖拉機減速度逐漸減小并趨于穩定;在t=6 s時發動機介入調節,由圖10d可知,采用最高生產效率變速規律時的拖拉機加速度增長最快且峰值更大即拖拉機加速能力更強。
5 實車試驗
5.1 試驗裝置及方法
5.1.1 試驗車輛及機具
試驗車為中國某農機廠生產的58.8 kW輕型拖拉機,該車的主要參數如表4所示。試驗拖拉機所裝載的機具是型號為525鏵式翻轉犁。

表4 試驗拖拉機主要參數Table 4 Main parameters of the test tractor
5.1.2 試驗數據采集裝置
本次試驗數據采集所用裝置為美國NI(National Instruments)公司生產的多功能I/O數據采集板卡及相應的接線盒。其中采集板卡的型號為:NI-PCI6229,接線盒型號為:SCB-68A。該采集板有4路采集通道,需要采集的信號包括:拖拉機變速器輸出軸轉速、車輪輪速、發動機油門開度和車速。采集頻率大小為1 kHz。
在LabVIEW軟件中搭建數據采集系統,用以在試驗時對發動機油門開度以及車速數據進行采集。
5.2 實車試驗與結果分析
本次試驗在常年耕種的田地中進行,作業內容是在不同深度進行犁地操作。由于不同深度的土壤結構及土壤松軟程度的差異,在每個土壤深度下進行作業時的工作阻力必然不同,所以本次試驗以犁地深度的不同來設定工作阻力的變化。
犁地工作開始時,拖拉機手動機械檔位位于4擋,設定初始犁地深度為25 cm,待拖拉機穩定工作時,取為試驗開始的0時刻。0~3 s犁地深度為25 cm;3~4 s為犁地深度切換過程,犁地深度由25 cm增加到30 cm;4~10 s犁地深度為30 cm。
根據試驗數據得到以最高生產效率為目標工況下拖拉機車速和加速度的變化規律,并將其與無控制、傳統動力性變速規律控制和最高生產率變速規律控制的試驗結果進行對比,如圖11所示。
由圖11可知,在作業時間3~4 s之間時,作業機具耕深從25 cm增加到30 cm,拖拉機作業阻力增大,無控制條件下的拖拉機車速持續降低至約4.62 km/h,采用傳統動力性變速規律的拖拉機車速緩慢增加,在t=7.5 s左右車速提升至約5.06 km/h,但遲遲未達到原有的高效作業車速5.5 km/h,而采用最高生產率變速規律的拖拉機能在8 s左右時快速恢復車速至高效作業車速區間的上限值5.3 km/h。在作業時間3~4 s之間,拖拉機加速度均持續下降至約-0.15 m/s2。4 s之后,阻力增大至峰值并保持不變。在進行調速控制后,無控制和采用傳統動力性變速規律條件下的拖拉機加速度增長緩慢最終僅分別達到0.01和0.05 m/s2,而采用最高生產率變速規律的拖拉機加速度能增長至約0.15 m/s2,加速度峰值更大,加速能力更強。
6 結 論
本文以HMCVT系統為研究對象,對拖拉機作業阻力發生波動后如何保證作業機組依然維持較高生產效率進行分析研究,得到如下結論:
1)提出了基于滑轉率-阻力區間劃分的拖拉機雙流傳動系統調速控制策略,通過對滑轉率進行區間劃分確定了滑轉率控制和車速控制的優先級。
2)提出了基于前饋補償滑模的泵排量控制方法,以解決油壓波動會影響液壓泵排量調節精度的問題可實現對跟隨期望信號的精準控制。
3)仿真與實車試驗結果表明:提出基于滑轉率-阻力區間劃分的拖拉機雙流傳動系統調速控制策略能夠在負載或路面條件發生變化時,將驅動輪滑轉率約束在容許滑轉率區間內;當拖拉機車速低于高效車速區間下限值時,本文制定的變速規律相比于傳統動力性變速規律能使拖拉機車速和加速度分別由5.06 km/h和0.05 m/s2提升至5.3 km/h和0.15 m/s2,能夠更快地提升拖拉機車速使其重置至車速區間的上限值,有效保證了拖拉機的生產效率。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
甘肅教育(2020年14期)2020-09-11 07:57:42
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
故事大王(2016年7期)2016-09-22 17:30:08
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32
兒童故事畫報(2013年3期)2013-06-24 05:40:30
