高位堆垛叉車柔性舉升運動規劃研究
2021-04-19 06:30:02葉國云
起重運輸機械 2021年6期
關鍵詞:作業
葉國云 張 巍 儲 江 王 班 ,2
1寧波如意股份有限公司 寧波 315600 2杭州電子科技大學機械工程學院 杭州 310018
0 引言
隨著現代物流運輸業的高速發展,高位立體倉庫已逐漸成為現代物流行業不可或缺式的組成部分。高位倉儲堆垛叉車是立體倉庫的重要倉儲搬運裝備,是實現物流機械化作業、減輕工人搬運勞動強度、提高作業效率的主要工具,一般應用于巷道式與窄巷道式貨架庫,該類庫房具有投資小、建設周期短、存儲物資及作業方式靈活、運行費用低等優勢特點[1]。隨著技術的日趨成熟,叉車自動化是叉車技術發展的一個重要方向,目前國外部分叉車制造商已開始對叉車自動化展開研究,通過在普通叉車的基礎上增加自動化控制模塊、安全控制模塊、導航控制模塊、無線接口模塊等,實現叉車的“雙模式”作業,即人工操作作業和自動化控制作業[2]。高位叉車的自動化作業模式與人工作業模式存在一定差別,一般情況下,自動化作業模式下叉車本體處于靜止狀態,無需考慮叉車水平行駛對舉升運動的影響,但需要根據自動堆垛的高度,提前對叉車的堆垛舉升運動進行合理規劃,在保證堆垛效率的前提下減小系統沖擊、增加系統穩定性。
本文以高位堆垛叉車自動堆垛作業過程中的舉升運動為研究對象,根據叉車縱向穩定性要求,給出叉車舉升運動允許的最大加速度。在此基礎上,基于三角函數加減速的S形曲線對升降運動進行規劃和仿真研究,并與傳統三角形加減速的S形曲線進行對比分析。
1 高位揀選車縱向穩定性學分析
高位堆垛叉車自動堆垛作業過程系統縱向穩定學簡化模型如圖1所示。假設叉車本體質量為m1,叉車質心O1距離前輪心距離為l1,距離后輪心距離為l2,前后輪所受地面反作用力分別為Ff和Fd,舉升貨物質量為m2,貨物質心O2與前輪水平距離為l3,貨物舉升方向上的豎直向上加速度為ah。
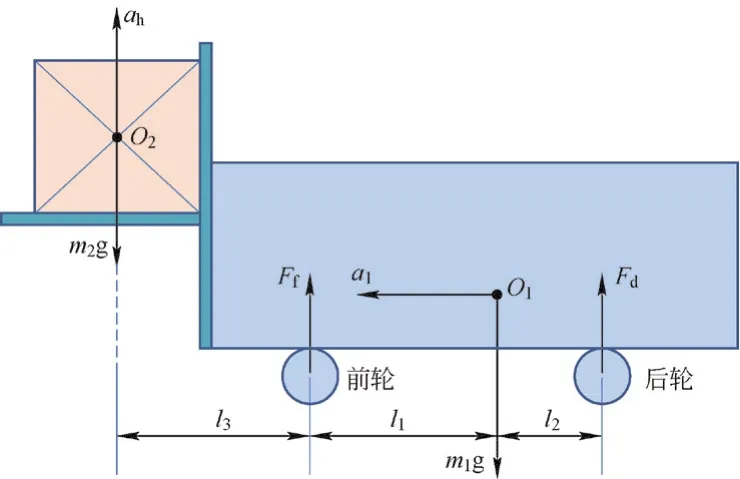
圖1 高位堆垛叉車縱向穩定簡化模型
叉車靜止舉升貨物時,設前橋受力為Ff,后橋受力為Fd,對車體以前橋為支點,根據力矩平衡公式有
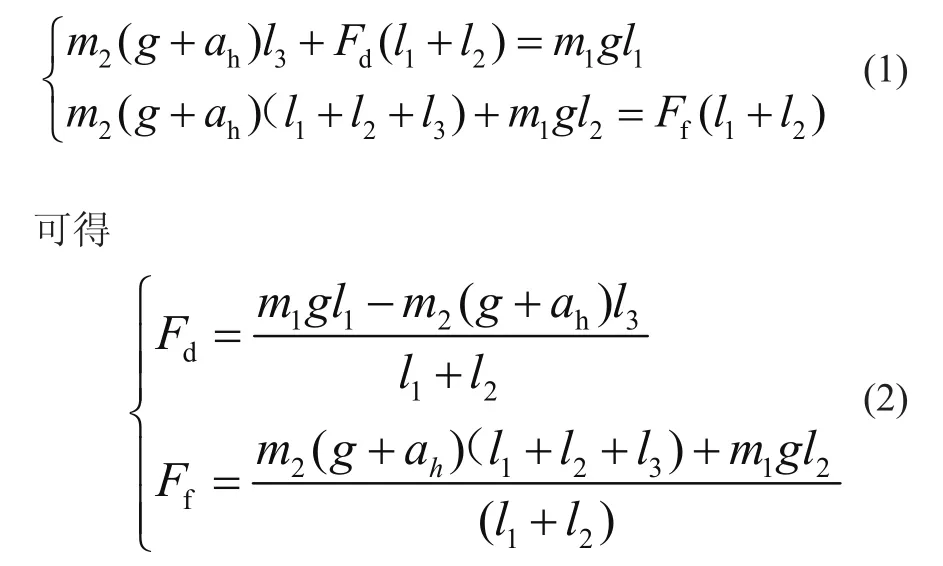
叉車前傾的臨界條件為Fd=0,求得此時舉升加速度為
2 基于三角函數型S曲線升降運動加減速算法
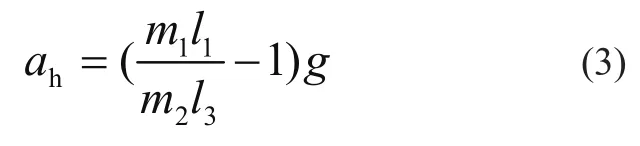
S形曲線加減速方法廣泛用于頻繁啟停的運動控制系統之中,如數控機床[3]、工程機械[4]、電機控制[5]及轉動臺[6]等場合。S形曲線加減速是指系統在加、減速階段的速度曲線形狀為S形,保證了速度光滑、加速度連續,最大限度地減小由速度、加速度的變化對機械系統造成的沖擊。一般情況下,S形曲線包括加速、勻速及減速三個過程,加速過程分為加加速、勻加速及減加速階段三個,減速過程包括加減速階段、勻減速階段和減減速階段。本文將基于三角函數的改善型S形加減速方法[7](如圖2所示),應用于高位揀選叉車的升降控制中,結合穩定性及舉升貨物允許的減速度界限值,以及叉車最大允許的升降速度和舉升位移,給出合理的叉車升降軌跡規劃。
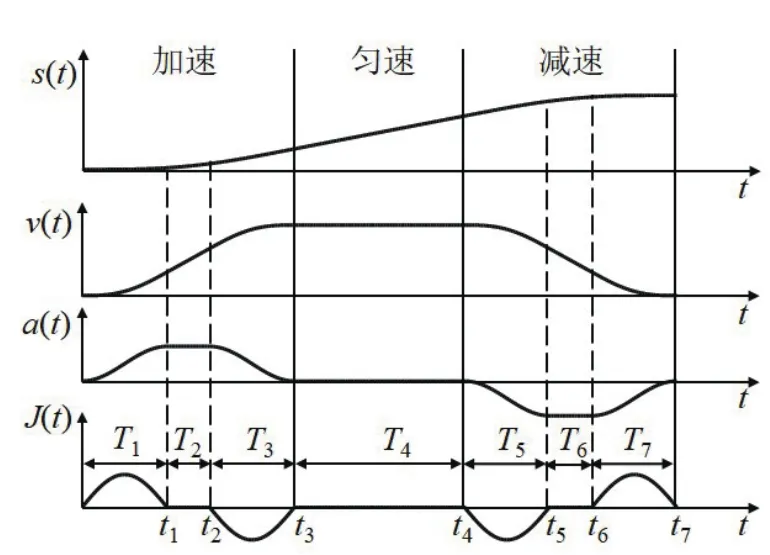
圖2 三角函數型S曲線加減速過程示意圖
根據三角函數知識,并結合邊界條件,可得加速過程中貨叉運動表達式為
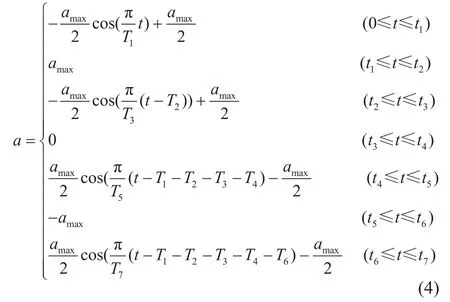
對于叉車運動而言,考慮叉車效率及安全,可將加減速過程中的勻加速和勻減速過程省去,此時貨叉升降運動加速度簡化為
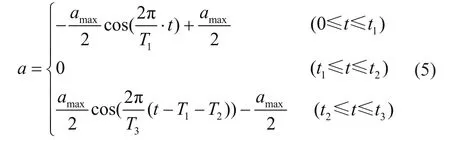
對上述加速度分別進行一次積分和二次積分即可得到貨叉運動速度v和位移s表達式。假設貨叉加減速過程中貨叉加速度和速度最大值分別為amax和vmax,一般情況下,加速過程和減速是對稱的,此時有,加速過程中的位移,同理減速過程中的位移為,則貨叉舉升運動分為三種情況:
1) 當貨叉總行程s>sa+sd時,此時貨叉升降運動包含加速、勻速、減速三個運動階段,貨叉速度可以達到最大值vmax。
2) 當貨叉總行程s=sa+sd時,此時貨叉升降運動包含加速、減速兩個運動階段,貨叉速度可以達到最大值vmax。
3) 當貨叉總行程s<sa+sd時,此時貨叉升降運動包含加速、減速兩個運動階段,貨叉速度達不到最大值vmax。
3 仿真分析
以某高位自動堆垛叉車進行算例分析,各參數為:叉車質重m1=6 750 kg,貨物質量m2=1 500 kg,l1+l2=1 926 mm,l1=790 mm,l2=1 136 mm,l3=910 mm。將相關參數代入式(3)可得ah=2.9 g,結合叉車結構強度并考慮留有足夠的安全裕度,取amax=0.5 m/s2,vmax=0.45 m/s。假設堆垛行程s=3.69 m,則此時sa=sd=0.405 m,有s>sa+sd,此時貨叉舉升運動包含減速、勻速、減速三個階段。作為對比,同時對三角形加減速S形曲線升降運動進行仿真。由仿真結果圖3可知,貨叉升降運動由先后經歷加速(1.8 s)、勻速(6.4 s)及減速(1.8 s)三個階段,總舉升行程為3.69 m,舉升過程中貨叉加加速度J連續,保證了貨叉的穩定性,減小了系統沖擊,與理論分析結果相一致。三角形S曲線升降運動舉升同樣高度所用時間相同,但加加速度J在舉升過程中存在突變,會給系統造成一定的沖擊。仿真結果表明文中所提出的三角函數型S形曲線可以在不降低作業效率的前提下,實現貨叉柔性舉升,減小系統沖擊。

圖3 貨叉舉升運動仿真結果
4 結論
本文針對高位堆垛叉車自動堆垛作業過程,根據叉車作業過程中的縱向穩定條件及操作員的舒適性,分析給出了貨叉舉升運動的極限加速度。開展了基于三角函數S形加減速曲線的貨叉舉升運動規劃,仿真表明所提出的加減速曲線在保證作業效率的和穩定性的前提下,實現貨叉加加速度的連續性,從而實現柔性舉升,減小系統沖擊。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
