基于空間圓模型的隧道全局中軸線提取方法
2021-04-20 09:42:42林景峰周茂倫
北京測繪 2021年2期
林景峰 徐 飛 周茂倫
(1. 山東科技大學 測繪科學與工程學院, 山東 青島266590; 2. 青島秀山移動測量有限公司, 山東 青島 266590)
0 引言
隨著國家積極推進基礎設施建設,地鐵、公路以及鐵路等各類隧道修建數量日益增多,同時隧道的安全問題也備受關注。由于隧道內部通常光線昏暗,因此采用傳統的測量方法進行隧道測量存在諸多困難[1]。而三維激光掃描技術能夠在弱光條件下提供高精度、高密度的測量數據,目前三維激光掃描儀廣泛應用于隧道變形監測分析[2-4]、文物保護[5]以及隧道竣工測量[6]等工程。
近年來,基于三維激光掃描技術提取隧道橫斷面的各類方法進行的諸多研究,都需要預先提取中軸線作為基準。目前隧道中軸線提取可分為基于二維投影、點云法矢以及三維模型擬合三種方式。(1)托雷[7]和李珵[8]均將隧道三維點云分別投影至X0Y和Y0Z兩個平面,通過擬合二次曲線提取隧道中軸線,該類方法只能提取局部的隧道中軸線,難以擬合完整的隧道中軸線。程云建等[9]通過單向投影以及RANSAC(Random Sample Cousensus)算法提取隧道邊界點集進行多模型擬合獲取初始中軸線,然后基于再次隨機采樣的全局優化算法獲取最終的隧道全局中軸線,該方法獲取的二維中軸線不能表達隧道的坡度信息;(2)藍秋萍等[10]基于隧道原始掃描點云法矢與中軸線的垂直關系,截取多段點云并利用高斯球映射原理擬合出該段隧道的中軸線,因為法矢的精度不高,所以提取的中軸線精度較低;LI等[11]通過設置閾值剔除法矢擬合精度較低的點集,再將剩余可靠度較高的點集進行中軸線擬合,提高了隧道中軸線提取的精度。但目前該類方法相比于基于三維模型擬合獲取的中軸線精度較低;(3)謝雄耀等[12]基于隧道三維點云擬合圓柱面模型,并將圓柱的軸線作為隧道中軸線,該方法只適用于直線型隧道;李雙[13]改進了基于圓柱面模型擬合中軸線的方法,提出三維不變矩陣提取隧道中軸線的方法,但只能提取局部隧道中軸線。荊海峰等[14]首先將預處理后的隧道三維點云按照隧道前進方向分成若干區段,然后基于中軸線與隧道表面點云法線的垂直關系提取各區段初始中軸線,最后對各區段擬合圓柱模型進行提取高精度中軸線,雖然這種方法提取的中軸線精度較高,但是其計算過程較為繁瑣以及構建模型難度大,難以得到推廣應用。
綜上所述,考慮到各類方法的優缺點,本文提出一種基于空間圓模型的隧道中軸線提取方法,該方法基于幾何分析準確提取出隧道邊界線以及全局水平中軸線,通過構建空間圓模型生成隧道全局中軸線,減少了傳統方法擬合橫斷面需要進行坐標旋轉的過程[15]并解決了全局中軸線缺少坡度信息的問題。
1 基于空間圓模型的全局中軸線擬合方法
1.1 水平中軸線提取
隧道中軸線能夠準確地表達隧道的走勢以及坡度等信息,目前隧道中軸線提取方法主要有基于雙向投影和單向投影方法。其中雙向投影方法,在直線型隧道中能夠提取精度較高的中軸線,然而在面對多彎隧道時,通常需要人工分離彎曲型隧道中的直線段和彎曲段,較為耗時費力、且自動化程度不高。相比于雙向投影方法,單向投影方法能夠提取完整的彎曲型隧道中軸線,且精度滿足隧道工程誤差容忍度[16]。因此,本文首先根據投影正算獲取隧道在X0Y水平面的投影點集;然后對投影點集構建Delaunay三角網提取出邊界點集,并根據邊界點集中的轉折點間距離和隧道直徑關系以及前進方向提取出左右邊界線;最后采用KD樹(在K維歐幾里得空間組織點的數據結構,K-Dimensinal)算法提取出初始中軸線,并根據工程需求提取一定間距的水平中軸線用于截取橫斷面。
1.1.1基于Delaunay三角網提取邊界線
以水平面為坐標系基準,將隧道三維點云投影至X0Y水平面得到條狀點云數據進行提取隧道邊界。目前提取平面點云邊界算法較多,其中Delaunay三角網算法適用于帶狀形數據的邊界
提取。Delaunay三角網在生成三角網過程中,以最近的三點形成三角形,且各三角形的邊皆不相交,每條邊都使用所在的三角形的頂點驗算并記錄相應的兩個頂點坐標。整個驗算過程中,若一條邊只被一個三角形使用過,表明這兩個頂點所確定的邊是邊界邊,存儲這兩個頂點坐標;若一條邊被兩個三角形使用過,表明這兩個頂點確定的邊在整個三角網內部,將其剔除。如圖1所示。
如圖2所示,當獲取隧道邊界點集后,首先對邊界點集按逆時針方向排序,并依次計算每相鄰三個點構成的角度θ,若θ在[80°,100°]范圍之間則中間點是轉折點;然后提取多個轉折點并計算轉折點間的距離;最后比較轉折點間的距離d與隧道直徑Φ的大小,若d遠遠大于Φ,則對應的轉折點位于是隧道邊界線上,然后依據隧道前進方向提取出左、右邊界線。
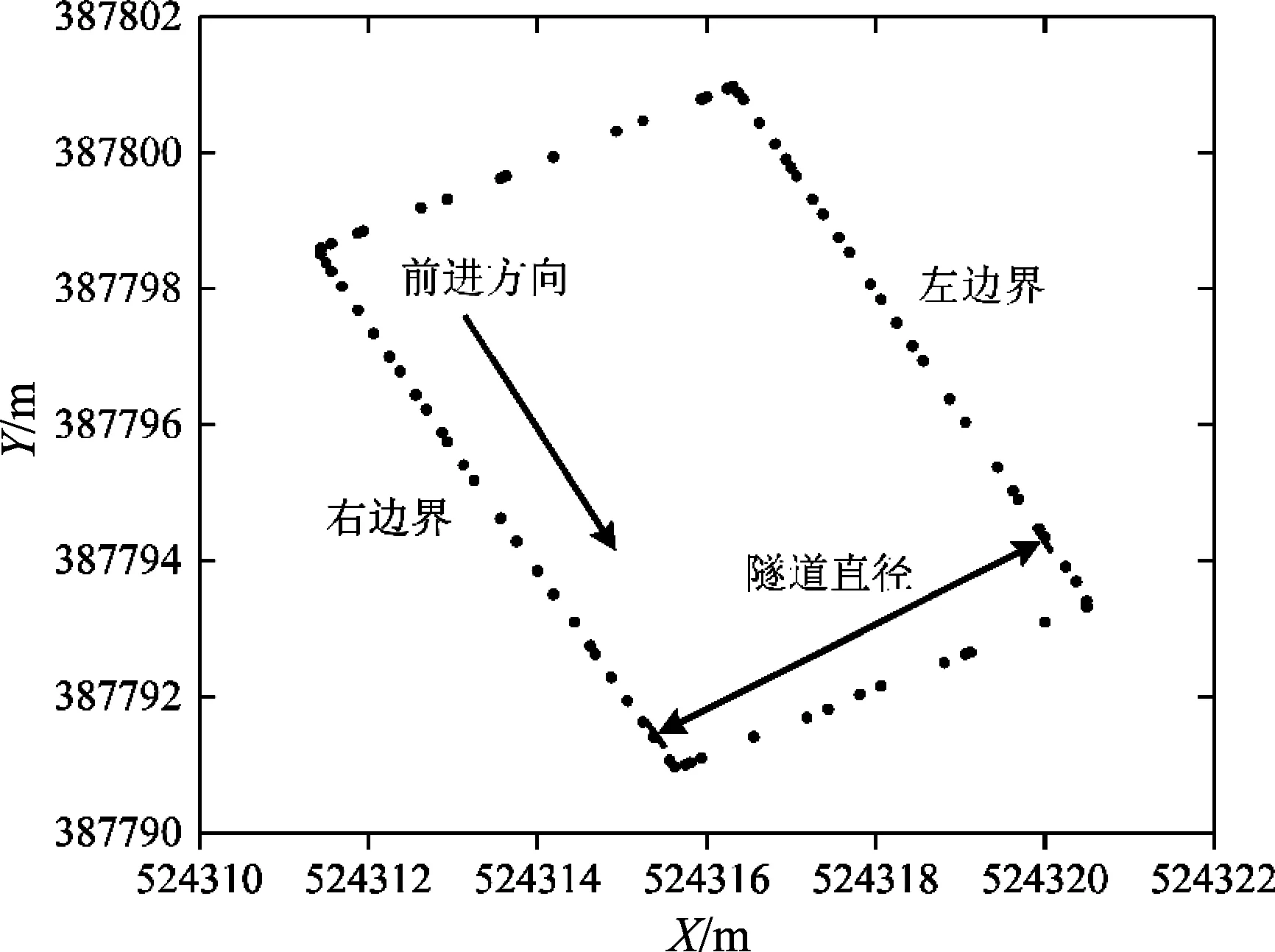
圖2 左、右邊界線提取
1.1.2基于KD樹提取水平中軸線
如圖3所示,首先對獲取左邊界線點集P構建KD樹,然后以前進方向定義左邊界的一端為起點,依次搜索出每個左邊界點Pi(xpi,ypi,zpi)
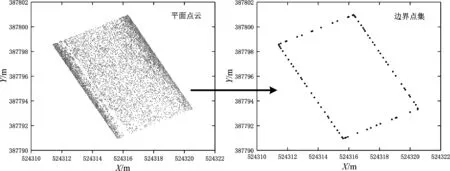
圖1 邊界點集提取
在右邊界上最近的兩個點Qi與Qj,再根據垂線公理獲取在右邊界的垂足點Vi(xvi,yvi,zvi);最后依據中點公式獲取初始水平中軸線控制點Mi(xmi,ymi,zmi)。

圖3 水平中軸線提取示意圖
由于隧道中軸線是一條不間斷的曲線,但在實際工程中是以一定里程控制點連接形成中軸線,因此本文根據工程需求對初始中軸線進行線性插值,并提取間距為I的水平中軸線用于提取橫斷面,進而擬合出等間距的隧道中軸線。
1.2 基于水平中軸線提取橫斷面
根據獲取的水平中軸線每相鄰的兩個點構建直線方程并求得對應中點以及中點處橫斷面的法向量,從而獲取中點處的橫斷面方程,再依據方程截取對應兩點間的隧道三維數據構成橫斷面。
即過中點處的橫斷面方程可表示為:
x-xuv+ku(y-yuv)=0
(1)
雖然隧道點云密度很大,但是落到橫斷面上的點較少,因此截取距離橫斷面I/2范圍內的點作為橫斷面上的點。如圖4所示,定義平面F為過中點Muv的橫斷面,將截取點云Gi(xgi,ygi,zgi)依次投影至相應的橫斷面。其中Δx,Δy,Δz分別為三個坐標軸方向上的變化量。
(2)
其中,Gi投影至橫斷面上對應點集為Hi(xhi,yhi,zhi),對應的橫斷面法向量為eu(1,ku,0)。

圖4 橫斷面點投影示意圖
1.3 基于空間圓模型擬合中軸線
根據圓形隧道的形狀以及獲取的橫斷面數據存在噪點的問題,本文基于RANSAC算法的隨機性和假設性進行濾波。隨機性用于減少計算,即迭代次數是基于局內點出現的概率;而假設性,是定義隨機抽出來的數據都是內點,并以此判斷其他點是否為局內點進行構建模型。然后根據模型估計獲取最優模型,再基于最佳模型對橫斷面數據進行濾波,獲取精確的橫斷面輪廓線點集。
針對濾波后的橫斷面輪廓線,進行構建空間圓模型獲取斷面圓心作為隧道中軸線控制點。如圖5所示,由于橫斷面輪廓線點集構成的空間圓是球體S與平面N的交線,因此輪廓線點集同時滿足球面方程和橫斷面方程,于是可利用附有條件的間接平差原理求解空間圓參數,但是該方法所求空間圓參數是一個近似值[17],所以本文結合附有條件的間接平差原理和投影變換獲取精確的空間圓參數。
1.3.1擬合近似的空間圓參數
首先設橫斷面方程為:
Ax+By+Cz+D=0
(3)
結合式(1)所求橫斷面方程,此方程中的系數分別為A=1,B=kr,C=0,D=-xr-kryr,則對應橫斷面的法向量為er(1,kr,0)。
其次設對應的球面方程為:
(4)
其中,球心O1坐標為(x0,y0,z0),球體半徑為R1。
因為輪廓線點Hi到球心的距離為|HiO1|=R1,所以將輪廓線點代入式(8)得:
(5)
然后根據間接平差原理建立誤差方程:
(6)
式(6)是非線性的誤差方程,將誤差方程線性化得:
(7)

最后根據誤差方程的限制條件Ax+By+Cz+D=0進行附有條件的間接平差,求得近似的球心坐標為O1(x1,y1,z1)和球的半徑R1。通過實驗分析,當球心至橫斷面的迭代距離為0.01 m時,能夠不占用太多算法的運行時間且減少投影變換誤差。
1.3.2擬合精確的空間圓參數
如圖5所示,首先獲取附有條件的間接平差求得的球面方程參數;然后求得球心至橫斷面的垂直距離Dr;最后基于與之對應的橫斷面法向量er(1,kr,0),將球心坐標投影至橫斷面方程以獲得精確空間圓的圓心O(x0,y0,z0),并求得對應的空間圓半徑R。
(8)

圖5 擬合空間圓示意圖
(9)
2 實驗分析
本文實驗數據是采用FARO Focus 3D X130三維激光掃描儀采集的一段隧道數據,該段彎曲型的圓形隧道全長約為450 m,起點里程為K1+20,數據采集于運營階段。通過比較插值前后的水平中軸線、濾波前后的橫斷面以及提取的隧道三維中軸線驗證本文算法的適用性。
2.1 水平中軸線提取
首先將預處理后的隧道點云數據依次通過投影變換和Delaunay三角網算法提取出邊界點集;然后基于邊界點集提取出左右邊界線并以此獲取初始水平中軸線;最后通過線性插值提取間隔為0.2 m的水平中軸線作為提取橫斷面的基礎數據。因為隧道邊界數據較長不便整體顯示,所以選取里程(K1+20)~(K1+70)m范圍內數據進行對比插值前后的水平中軸線。如圖6所示。

圖6 插值前后的水平中軸線
2.2 橫斷面提取
首先根據提取的水平中軸線進行分割隧道三維點云數據;然后依據投影變換獲取了2 239個橫斷面數據;最后通過對每個橫斷面采用RANSAC算法進行濾波獲取精確的橫斷面輪廓線。由于隧道整體橫斷面輪廓線數據量較大不便整體顯示,因此選取里程(K1+20)~(K1+25)m范圍內數據進行對比濾波效果。如圖7所示。
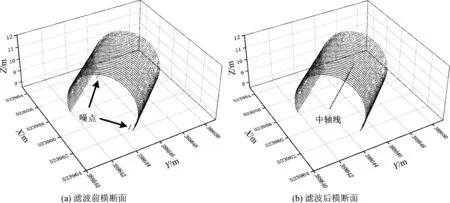
圖7 濾波前后的隧道橫斷面
2.3 全局中軸線提取
隧道全局中軸線不僅能夠表示隧道的走勢,而且可以通過渲染高程描述隧道的坡度、坡向等信息,如圖8所示。

圖8 隧道全局中軸線
3 結束語
本文研究了一種基于空間圓模型提取隧道全局中軸線的方法,以隧道邊界線、水平中軸線以及橫斷面輪廓線間的空間幾何關系為基準,通過構建空間圓模型生成隧道中軸線。首先提取出Delaunay三角網算法獲取的邊界點集中的轉折點,并利用轉折點間距離與隧道直徑的關系提取出隧道邊界線;其次結合KD樹算法和線性插值方法提取出等間距的水平中軸線;然后針對橫斷面數據的噪點,使用RANSAC算法對橫斷面進行濾波獲取了精確的橫斷面輪廓線;最后結合附有條件的間接平差和投影變換構建空間圓模型擬合出精確的隧道中軸線,避免了傳統空間圓迭代擬合誤差以及傳統方法的橫斷面提取過程中需對點云進行坐標轉換帶來的誤差,提高了擬合精度為彎曲型隧道以及井筒等圓形建筑的中軸線擬合提供了一種可參考方案。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
