地鐵自動化變形監測系統數據處理方法研究
2021-04-21 06:14:12于曉紅
設備管理與維修 2021年5期
于曉紅
(中鐵十九局集團礦業投資有限公司,北京 100161)
0 引言
地鐵自動化監測有著廣泛的應用前景。例如,徠卡公司相繼開發了TCA+APS Win自動化監測系統、新一代GeoMoS自動化監測系統以及應用于德國地鐵的TCA+GeoMos自動化監測系統[1]。近年來,國內研發了應用智能全站儀監測的地鐵自動化監測系統[2]。其中,Leica鄭州歐亞測量系統有限公司與解放軍信息工程大學測繪學院合作研發的ADMS自動變形監測軟件在廣州地鐵一號線成功應用[3-4]。我國學者進行大量地鐵自動化監測的數據處理及建模可視化研究,提出把多領域、多學科融合、滲透下的自動化監測系統向數字化、一體化、智能化方向發展[5]。
對RocMos全自動化監測系統進行說明介紹,將該系統應用于S市地鐵X號線第X合同段變形監測中,基于卡爾曼濾波原理對監測數據進行處理分析。證明其在工程應用的可用性與高精度。
1 自動化監測系統介紹
RocMos自動化變形監測系統由全球衛星定位導航及電子數據處理系統、多種傳感器等其他系統組成[6],具有可無人職守全天候連續自動監測、遠程遙控自動監測以及提前預置無需額外配置數據庫等特點,各子系統一體化,方便操作,具有遇障礙重復測量的時間延遲功能。可搭配多種主流數據采集傳感器,多監測模塊獨立,能應用全站儀望遠鏡小視場功能,解決了較窄環境空間內棱鏡較多而不能正確辨別對應棱鏡的難題[7]。并能實現自動報警和消息傳遞功能,可自定義圖形、報告的格式并輸出多種兼容的數據格式[8]。
1.1 自動化監測系統組成
該自動化監測系統由3個分支組成:數據采集、遠程通信和處理分析部分[9],數據采集包括控制計算機,全站儀和待測對象。選用徠卡TM50全站儀測量機器人,視角清晰,采用四重軸系補償系統,角度測量精度可達到0.5″,適應大多數工作環境,具有強大的自動學習測量功能和足夠高的測量精度。內置目標自動跟蹤裝置[10]可自動識別目標,能精準照準棱鏡[11]。RocMos自動化系統檢測軟件經過設置后可控制全站儀等測量儀器進行數據采集。
RocMoc操作箱控制數據遠程傳輸。控制器電腦經由操作箱對數據采集系統發送指令,指導數據采集系統進行數據采集,再將數據經由操作箱傳送回控制器電腦,并通過軟件自動進行平差處理和坐標計算等數據處理分析工作。
數據處理分析部分,分析基于RocMos自動化監測體系預置的數據庫。
1.2 地鐵自動化監測系統的實施流程
計算機上安裝RocMos控制軟件及相應的驅動,然后將儀器與全站儀、氣象傳感器、RocMos控制盒子、電腦依次連接,進行軟件設置。數據采集前設置控制器電腦參數,并與RocMos系統中其他部件連接,開啟全站儀;對RocMoc進行儀器初始化,通過控制軟件對整個系統進行測站設置、監測點位,再將結果整理。自動化變形監測系統運行流程如圖1所示。在結果界面可查看監測進度,點位圖中查看監測點、控制點以及設站點的相對位置;可查看報警記錄、測站點的坐標變化、進行點位坐標變化圖等曲線圖的制作。
2 變形監測數據處理方法研究
卡爾曼濾波處理數據,尤其是波動數據。動態與觀測公式組成濾波模型如下[12]:

Xk表示n維系統狀態向量,Zk表示m維系統測量向量,Φk,k-1為k-1時至k時n×n維轉移陣,Γk-1為n×p維噪聲系數陣,wk-1為P維系統噪聲向量,Hk為m×n維觀測噪聲陣,vk為m維觀測噪聲向量,w、v符合特征:

Qk是系統過程噪聲wkP×P對稱非負定方差陣,Rk為觀測噪聲vk的m×m對稱正定方差陣,δkj是克羅內克函數。
Kalman濾波分預計、更新兩部分[13]。前者可由目前狀況估測下一刻狀態,后者可依據目前監測信息對預測信息修正。以下為具體計算步驟:

圖1 自動化變形監測系統運行流程
預計分狀況一步估測式(4)、觀測預報值一步預計式(5)和一步預計系統狀況誤差方差陣式(6)。

更新分為增益矩陣式(7)、狀態估計式(8)和估計誤差方差陣式(9)

3 應用實例
以S市X號地鐵隧道自動化變形監測為例,通過MATLAB和卡爾曼濾波應用對監測數據剖析處理。
3.1 地鐵變形監測方案設計
地鐵變形監測方案規劃涵蓋監測精度劃定、點位布置和自動化監測體系處理。根據建設方的標準,精度認定涵蓋點位豎向、水平位移許可值,邊界與報警值。監測分為監測點位布置、量測、數據操作。
地鐵X號線S站右線,規劃里程為K13+682至K13+802,長度大概為130 m,設計15個監測面,同時要有一定的點位布置和監測頻率密度。地鐵隧道監測點布設位置如圖2所示。地鐵隧道監測斷面如圖3所示。
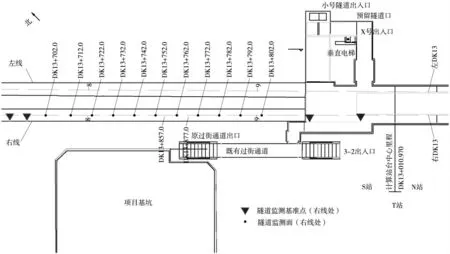
圖2 地鐵隧道監測點布設位置

圖3 地鐵隧道監測斷面
全部觀測流程的最初基準由全站儀架設站、基準控制點組成。原則上布設平穩,避免點位變化損壞,且周圍無干擾。監測網型結構必須科學,圖形結構要合適。在指定點設置徠卡TM50全站儀測量機器人,根據隧道長度在軌道兩側埋設棱鏡,后視定向,開始自動測量。
3.2 基于自動化檢測系統的數據處理
成果處理采用RocMos全站儀變形監測系統進行差分平差計算,得出本時段的監測點的位移情況,從而反映出每個監測斷面的實時變化趨勢,若測點超限,系統會自動發送預警信息。
MATLAB卡爾曼濾波去噪主要內容為波分析、系數閾值操作與濾波重構,濾波函數與數據光滑度、模型自適應性有關。卡爾曼濾波工具箱去噪流程如圖4所示。
應用Kalman算法濾波、預計要確定濾波初值:狀態最初向量,協方差陣,動態噪聲的初始、觀測噪聲方差陣。在實例中由RocMoc自動化監測系統計算,同時利用時間等間隔的數據進行Kalman濾波處理,系統參數為所得點三維坐標及變化速率,系統噪聲為監測點速率瞬時變化。
4 數據分析
自動化監測體系以圖形形式將點位變形趨勢實時直觀化,察看趨勢把握監測變形信息。繪制變形量—時間的曲線,分為變形速度、累計位移、收斂累計位移與時間的曲線等,實時展示的數據信息可隨時反映地鐵監測動態。
以隨機選取的監測點M為例,統計監測值橫、縱向位移的累積變化量。監測折線圖如圖5所示。
由圖5觀測數據500期,點位變形均在(-1~1)mm,未超過累計位移限值,總體沉降位于可控限值內,但是產生不均勻沉降,可能對周邊建筑物造成影響,因此需要采取適當的保護措施。基于MATLAB的Kalama濾波去噪操作,對監測點位位移狀態估量。將變形量設為-0.3 mm。卡爾曼濾波直接處理監測點水平位移數據前后變形曲線如圖6所示。
圖6中,濾波值由發散過度至逐步收斂并獨立與初值、后期變形趨勢大體符合。426期后,兩種數據偏差較小,可修改再次擬合;Kalman濾波彌補原數據的系列誤差,觀測數據平滑。監測點M濾波殘差見表1。
從表1知,濾波后監測點X、Y方差為:0.0217,0.0205,小于原始方差。圖中看出,濾波值和原始數據趨近相同且更光滑,表明監測數據變化情況可擬且穩定。監測點1~480期X、Y、Z軸位移速度和趨勢線變化如圖7所示。

圖4 卡爾曼濾波工具箱去噪流程
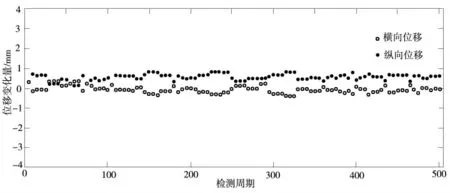
圖5 監測點M位移

圖6 卡爾曼濾波直接處理監測點水平位移數據前后變形曲線
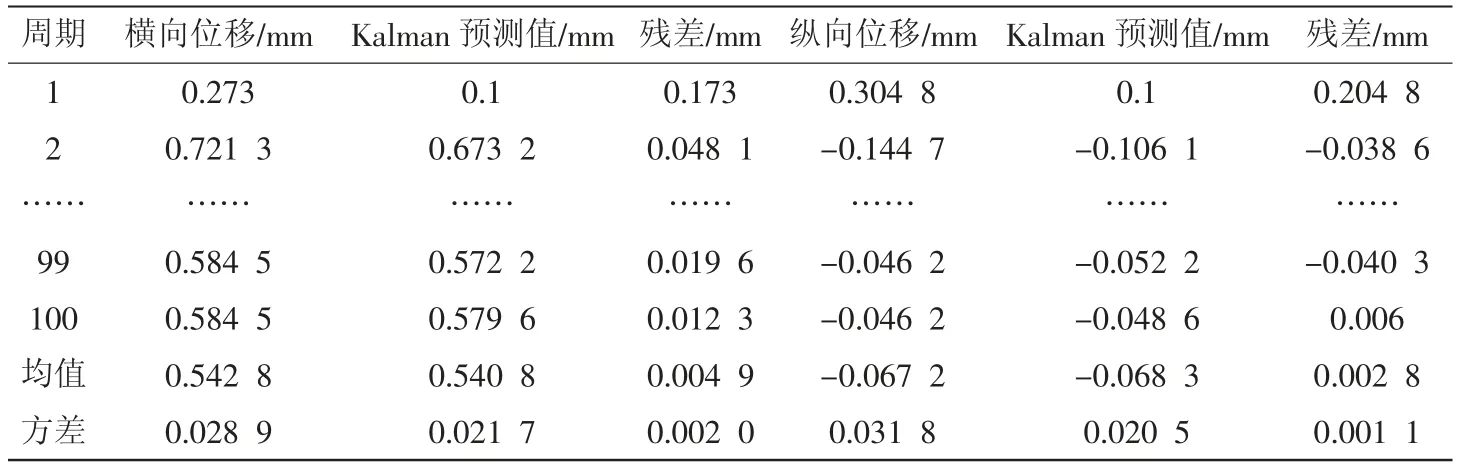
表1 監測點M濾波殘差

圖7 監測點1~480期X、Y、Z軸位移速度和趨勢線變化
由圖7可知,監測點坐標3個方向的位移速率均保持在0附近,無特殊變化。介于監測對象為施工中的地鐵,由此得變形動態性弱,速度緩慢。
5 結語
通過應用RocMoc全自動化監測系統,基于卡爾曼濾波,對監測數據處理分析,證明Kalman方法在地鐵自動化變形監測可靠性,能達到確保工程、經濟安全,施工方法合理的目的。
自動化監測系統保障地鐵安全運行。同時,利用Kalman濾波對形變去噪,可滿足精度要求,并具有相應的預測功能。這具有非常重要的現實意義,更能滿足現代地鐵建設對監測工作的要求。研制契合國內適用的自動化監測系統,保障自動化監測發展,為經濟高速發展供應源源不斷動力。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中華詩詞(2020年1期)2020-09-21 09:24:52
工程與建設(2019年3期)2019-10-10 01:40:18
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
電測與儀表(2016年9期)2016-04-12 00:29:52
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
