可拋棄式水動力監測微型浮標設計
2021-04-25 06:20:54萬隆君徐軼群
海洋技術學報 2021年1期
胡 穎,萬隆君,2*,徐軼群,2
(1.集美大學 輪機工程學院,福建 廈門 361021;2.集美大學 福建省船舶與海洋工程重點實驗室,福建 廈門 361021)
近海小尺度表層流水動力學參數可幫助人們了解赤潮擴散[1]、泥沙運移機制等自然現象[2-3],也可追溯海洋垃圾和污染物排放源頭,評估海洋污染,監測養殖環境[4],提高漁民捕撈效率,快速尋找失水人員實施救助等[5]。本論文研究了一種可拋棄式水動力監測微型浮標,通過一定數量的放置,隨海流同步漂移,周期性將位置、流速和浪高等數據通過自組網傳送到岸端大數據公共服務平臺,對開展表層水動力學研究具有重要的意義[6-7]。
目前,大多數海洋移動觀測平臺采用衛星通信和GPRS通信方式。李文彬等[8]在2011年設計了基于新一代Argos衛星的表層漂流浮標;張少永等[9]在2014年設計了基于北斗系統的C-Argo浮標;孔佑迪等[10]在2015年設計了基于銥星通信應用于海洋環境在線監測的漂流浮標。Argos系統數據傳輸的實時性差,需衛星過頂后才能傳輸數據;北斗系統數據傳輸的實時性和安全性有所提高,但通信范圍受限,在一些偏遠海域,運營商基站無法覆蓋的區域無法通信;銥星通信覆蓋面廣、傳輸速率高,但通信成本高。一些浮標采用GPRS通信方案實現遠距離數據的傳輸,但GPRS模塊功耗大,且按照流量計費[11]。在結構方面,海洋表面漂流浮標主要由標體和水帆組成,目前學者的研究主要集中在浮標結構的優化以及水帆材料的改進。王鵬等[12]在2017年設計了一種浮標體為葫蘆型的表層漂流浮標,減少浮標體對水帆運動的影響;張繼明等[13]在2018年對浮標結構進行優化,提高了浮標的穩性和耐波性,但浮標體積重量較大,無法一次性大量布放,采集精度低,且回收困難。
近年來,測流方式主要有浮標法和流速儀法。傳統的浮標法測流是通過人工記錄浮標漂浮相隔定點距離所需的時間,按照直線距離計算,但浮標在實際運動過程中受到風速水速的影響軌跡并不是直線,計算距離和實際距離之間存在誤差,且由于人工記錄,受人腦反應時間影響,存在較大誤差[14];傳統的機械式流速儀屬于單點式測量儀,只能采集固定點的流速,近年來多采用ADCP(多普勒流速剖面儀)測流,ADCP可以測量其所處位置垂直剖面的多個測量點的流速,其測流方式有固定式和走航式,固定式只能測量某一固定位置垂直剖面的流速,測量范圍受限,而走航式是將ADCP固定在船上,隨著船的運動軌跡測流,流速測量值受到船速的影響,且無法反應海流的流向[15]。
為了解決現有浮標通信成本高、功耗高、傳輸距離受限以及以往測流方式無法在反映海流流速、流向的同時精細化采集海流流速等問題,本文設計并制作了基于窄帶物聯網LoRa機制無線傳輸可拋棄式、不回收水動力監測微型浮標。文中運用Ansys Workbench對浮標水動力特性進行仿真研究,優化結構,提高浮標的穩定性;還通過仿真和水槽實驗對比分析,確定浮標的最優舵葉尺寸。實驗證明,可拋棄式微型浮標對海洋表層流研究具有實際應用價值。
1 帶減搖鰭和舵葉的微型浮標設計
1.1 結構設計
浮標法測流的核心是以浮標的流速和流向表征海表的流速和流向。通過對浮標體結構進行優化,增強微型浮標漂流的穩定性,使浮標體能較好地反映海洋表層流水動力學參數。增加減搖鰭結構,防止微型浮標隨著海流運動出現大范圍的晃動,改變天線的方向,影響信號的接收與發送。鰭狀結構增大浮標體表面與海水表面的接觸面積,從而增加浮標與流體間的摩擦力,使可拋棄式微型浮標能在海中穩定地漂流。同時,為了減輕微型浮標在隨海流運動時大幅度旋轉對測流精度的影響,增加了舵葉結構。如圖1所示,在迎流面,平行水流與附加水流方向相反,流速減小,壓力增加,而背流面的平行水流與附加水流方向相同,所以流速增加,壓力減小,舵葉兩面產生壓力差,舵葉受到平行于水流的舵阻力Pd和垂直于水流方向的舵升力Pl,其合力P同時可以分解為垂直于舵葉剖面的舵壓力Pn和平行于舵葉剖面的舵葉摩擦力Pt,在舵壓力作用下會使浮標產生回轉力矩,一定程度上減輕浮標的旋轉程度。
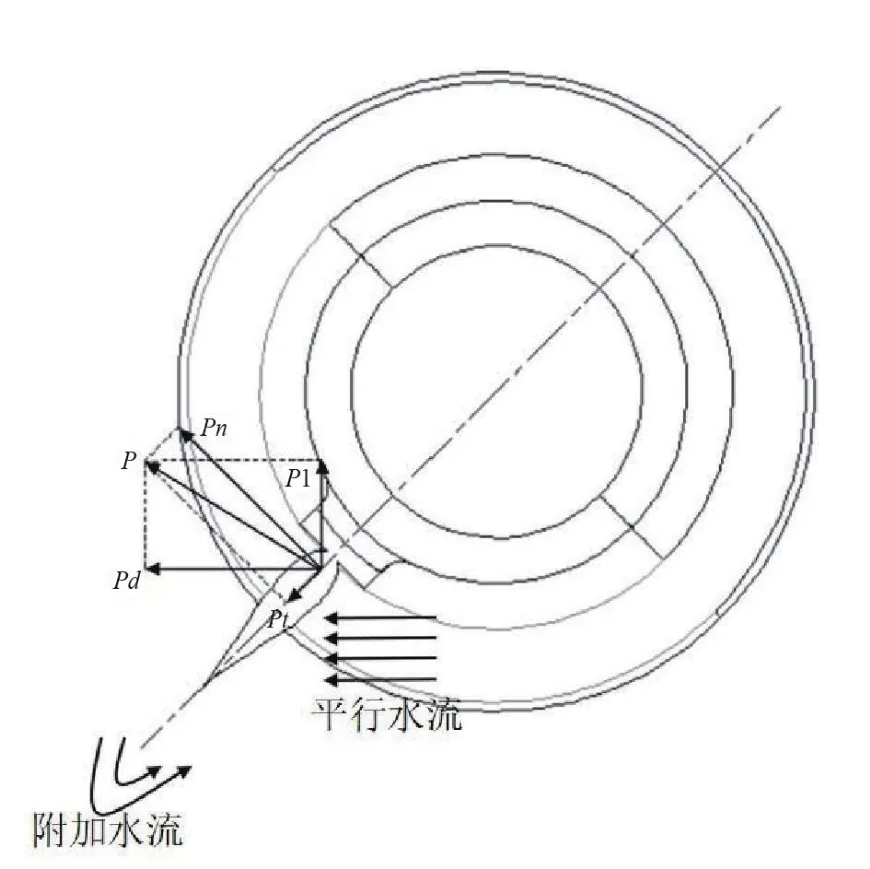
圖1 舵葉受力分析圖
如圖2所示,可拋棄式微型浮標由上下兩部分組成,通過螺栓連接和密封。根據通信定位模塊、天線、電池等尺寸確定浮標總高為150 mm,最大外徑為140 mm,微型浮標具體尺寸如圖3所示。可拋棄式微型浮標頂部配有天線,天線伸出殼體,增強信號強度。浮標體上半部分內置北斗定位模塊和LoRa通信模塊。浮標體下半部分內置電池和配重塊。配重塊可以減小浮標體水面以上結構的體積和重量,降低浮標重心的高度。

圖2 可拋棄式水動力監測微型浮標三維模型
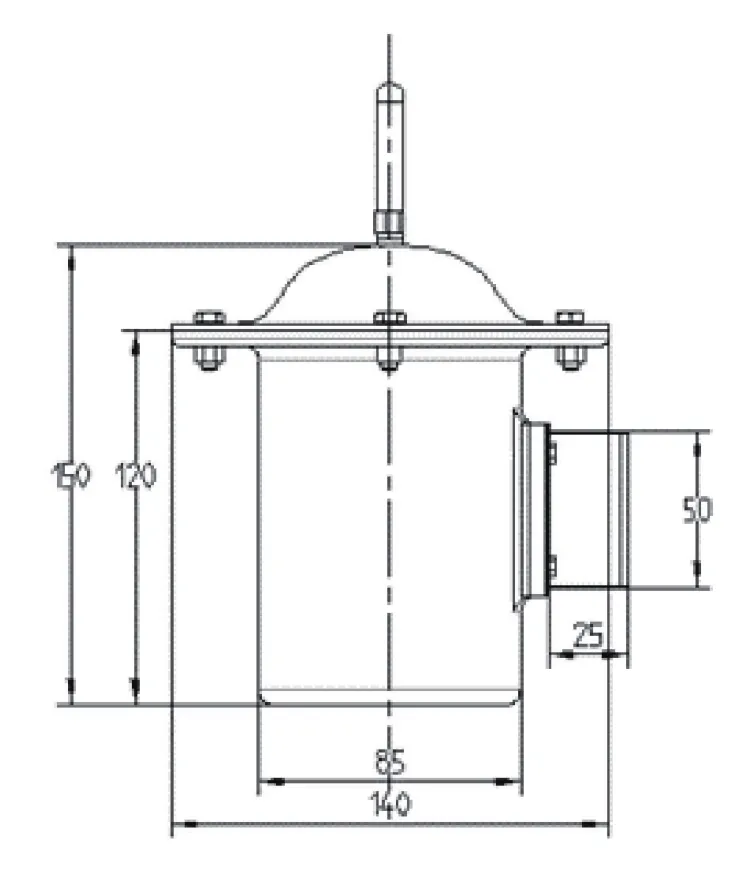
圖3 可拋棄式水動力監測微型浮標結構尺寸圖
1.2 電源配置
可拋棄式微型浮標通過配置電源來滿足發送信號周期為2 min,連續工作1個月。已知電源提供3.7 V穩壓,通過實測得到浮標發送數據期間電流為120 mA,待機時電流為20 μA,根據目前傳輸的數據量,每次發送數據的時間約為2.5 s。
浮標發送1 h數據的功耗為:

連續供電1個月,至少需要蓄電池容量為:

考慮休眠時間耗電,所以選用3 000 mAh的蓄電池。
1.3 工作性能指標
浮標的工作性能指標如表1所示。

表1 可拋棄式微型浮標工作性能指標
2 基于窄帶物聯網LoRa機制和北斗定位的微型浮標通信網絡設計
窄帶物聯網LoRa機制是一種長距離無線通信自組網絡,LoRa通過線性擴頻調制技術,保證低功耗的同時增加了通信距離;無需額外通信費用,大幅降低了通信成本[16];LoRa模塊能實現毫秒級計時[14],浮標采用GPS/北斗雙模定位,測速精度可達0.1 m/s,與傳統浮標法相比采集精度更高。LoRa采用433 MHz頻點組網,由基站和終端(浮標)構成,如圖4所示。基站包括海面漂浮基站、島上基站、岸標基站以及船上基站。每個浮標都安裝了LoRa終端模塊,構成了傳感網絡,一個基站通信能力可以覆蓋半徑20 km,終端與終端之間、終端與基站之間通過通信接力組建mesh網絡架構,通過路徑優化可以實現半徑100 km以上的海域無線通信覆蓋。
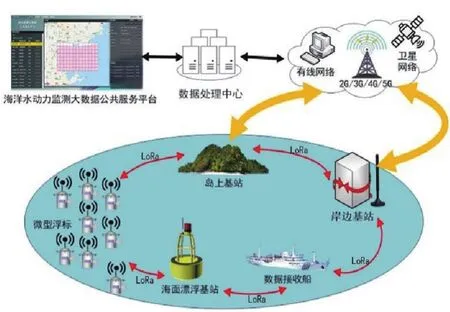
圖4 基于Lora的可拋棄式微型浮標的網絡架構圖
根據實驗要求一次性布放40個浮標,設定采集周期為2 min,進行一次通信接力最短為0.5 s,2 min內可以完成通信接力次數為:
一次通信接力最遠傳輸距離20 km,那么任一浮標通過通信接力最遠傳輸距離為:

一個LoRa基站能接入上萬個終端,將帶有LoRa終端模塊和北斗定位模塊的微型可拋棄式浮標大量布放于海流中,實現海流數據精細化采集,可拋棄式微型浮標周期性地將位置、流速和浪高等數據傳遞給LoRa基站,LoRa基站通過3G/4G或衛星通信的方式將數據傳送到海洋水動力監測大數據公共服務平臺。
可拋棄式微型浮標內部裝配電路板,電路板設計具有LoRa低功耗窄帶通信、北斗位置定位和授時功能,該電路由CPU模塊、北斗/GPS定位模塊、窄帶通信模塊、TTL接口和電源模塊組成[17]。電路板實物圖如圖5所示。
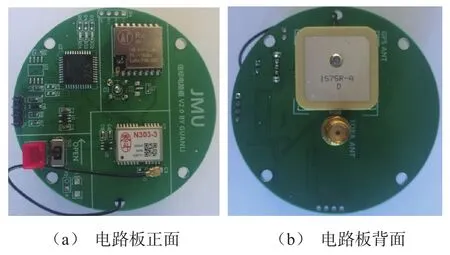
圖5 電路板實物圖
浮標采用STC15W4K系列單片機為核心處理器,實現數據的接收處理、協議解析、數據緩存和數據通訊。定位模塊和芯星通UM220-IV NL芯片為核心,負責接收北斗/GPS的信號,實現位置定位和北斗授時。窄帶通訊模塊選用Ra-01為數據收發模塊,發送和接收頻率為410~525 MHz,實現多通道獨立數據收發。電源模塊采用3.7 V穩壓供電,具有電源保護作用;串口模塊采用4針TTL模式,進行核心處理器的程序下載與更新。
可拋棄式浮標的工做流程如圖6所示。程序啟動后,將對Lora通信和北斗通信進行變量初始化、配置主程序參數等操作。接下來進入到北斗數據采集和監聽程序,并判斷是否處于采集時間點,若不是采集時間點,則繼續監聽北斗信號,若是采集時間點,則進行北斗有效數據的采集和存儲。采集程序結束后,判斷基站是否能接收程序,若沒有基站接收數據則繼續監聽北斗數據,若有基站接收數據則讀取歷史數據并將數據傳輸。
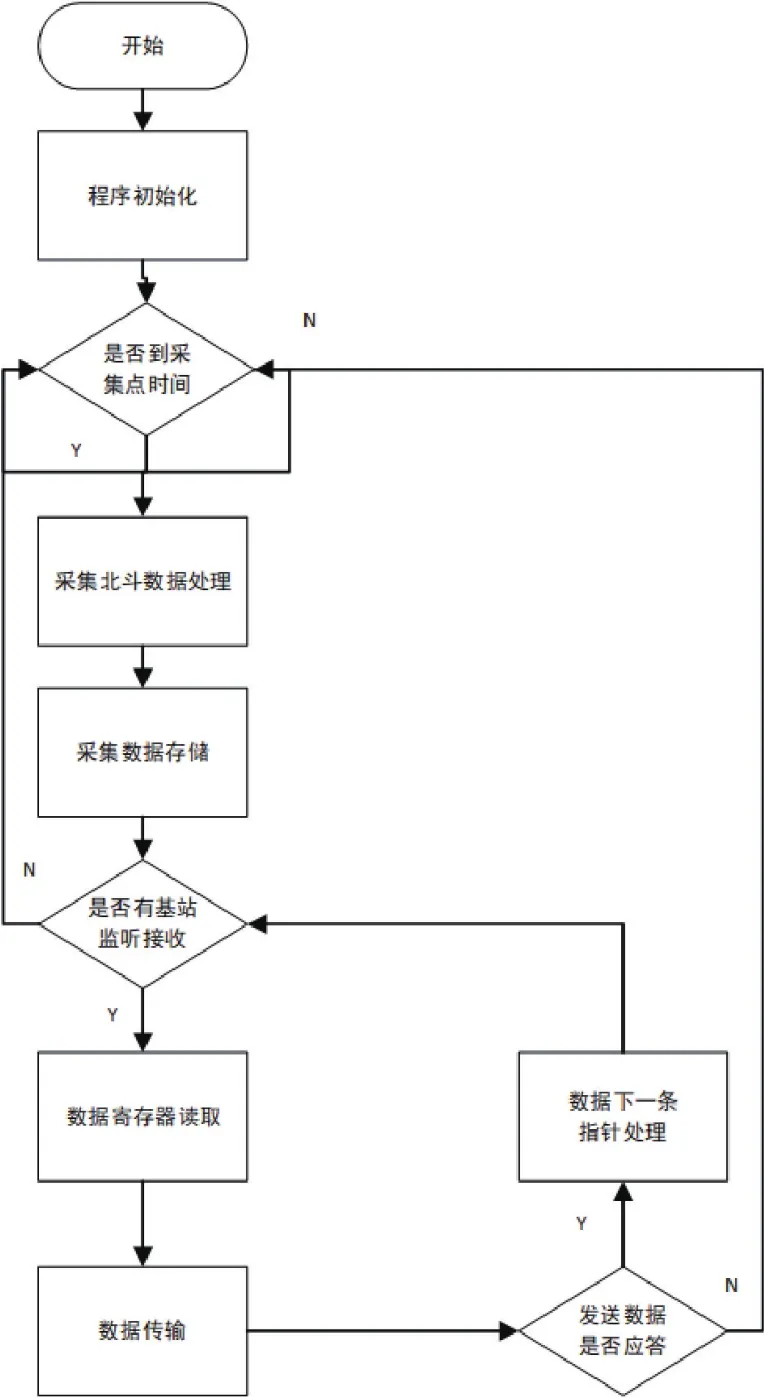
圖6 可拋棄式微型浮標工作流程圖
3 浮標體流體力學仿真分析
文中通過ANSYS Workbench中的Fluent和Static Structural模塊對浮標進行流固耦合分析。對比分析帶舵葉和減搖鰭的微型浮標與未進行結構優化的圓柱形浮標、帶不同展弦比舵葉的微型浮標的水動力學特性。證明帶舵葉和減搖鰭的微型浮標體的優越性,同時確定微型浮標所帶舵葉的最佳尺寸。
3.1 控制方程
3.1.1 流固耦合方程
流固耦合遵循最基本的守恒原則,所以在流固耦合交界面處,應滿足流體與固體應力τ、位移d、熱流量q、溫度T等變量的相等或守恒,即滿足如下4個方程:

3.1.2 湍流方程:
湍流方程如式(9)~式(10)所示:
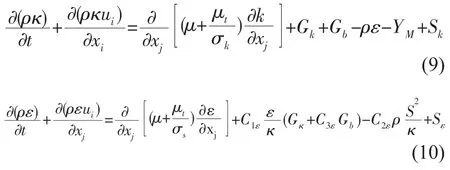
式中:κ為湍動能;ε為耗散渦;為湍動能的變化率;為對流輸運的湍動能在X方向上的變化率;為耗散渦的變化率;為對流輸運的耗散渦在X方向上的變化率;Gκ為平均速度梯度產生的湍動能κ的產生項;Gb為浮力引起的湍動能κ的產生項;YM為可壓湍流中脈動擴張的貢獻;C1ε,C2ε,C3ε為經驗常數;Sκ,Sε為用戶定義的源項。
3.2 網格化處理與前處理設置
采用大型通用有限元分析軟件ANSYS Workbench進行整體結構模型建模,整個流體域的尺寸為長1 600 mm,寬500 mm,高500 mm。浮標在海水中漂浮時,主要受到海水的影響,所以仿真部分忽略空氣對浮標的影響,只研究水流對浮標運動的影響。在對浮標進行瞬時的流固耦合分析過程中,假定微型浮標是固定不動的,水流是相對運動的。將模型導入到ANSYS中的 Design Modeler模塊中,對流體域進行抽取,接著通過Meshing對模型進行網格化處理,總共生成1 071 088個網格,網格質量良好。
流體區域的入口邊界為速度入口邊界,速度大小設置為0.35 m/s。出口邊界為無外部約束的自由邊界且速度未知,所以出口邊界設置為壓力出口邊界,壓力大小為0 Pa。在Static Structural模塊的Engineering Data中定義材料為光敏樹脂,根據光敏樹脂的材料屬性設置材料密度為1.16 kg/m3、楊氏模量為2.5×106和泊松比為0.23。
3.3 流固耦合分析
3.3.1 帶減搖鰭和舵葉的微型浮標與圓柱形浮標比較分析 圖7和圖8為零攻角情況下,帶減搖鰭和舵葉展弦比λ=1.5的微型浮標與圓柱形浮標水下部分在0.35 m/s水流下的速度矢量圖和壓力分析圖(展弦比λ=h/b。其中,h為舵葉的高度b為舵葉的弦長)。
比較圖7-a和圖7-b可以看出,在水流沖擊浮標時,帶舵葉的微型浮標在舵葉與浮標體的連接處幾乎沒有產生漩渦,舵兩側流速對稱相等,不產生舵壓,圓柱型浮標的背流面會產生漩渦,會誘導浮標發生偏轉;圓柱形浮標背流面流線稀疏且分散,而帶舵葉的微型浮標流線在舵葉尾部匯合,與來流平行,流線較密且集中,說明增加舵葉結構一定程度上減輕漩渦,并且保證浮標的穩定性。

圖7 在0.35 m/s水流作用下浮標的速度矢量圖
比較圖8-a和圖8-b可知,帶減搖鰭和舵葉的微型浮標結構所受最大壓力為8.217 6×10-5MPa,而圓柱型浮標所受最大壓力為8.272 2×10-5MPa,說明帶減搖鰭和舵葉的微型浮標結構受力更加均勻,穩定性更好。
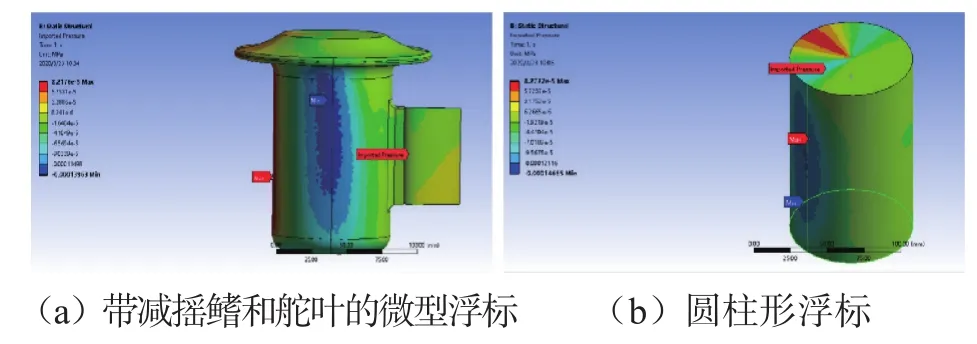
圖8 在0.35 m/s水流作用下浮標壓力圖
3.3.2 可拋棄式微型浮標舵葉壓力分析 圖9為帶減搖鰭和舵葉的微型浮標在來流攻角為45°,流速為0.35 m/s時浮標迎流面和背流面壓力分析圖。在有攻角的情況下比較浮標舵葉兩面所受壓力,可以發現舵葉迎流面壓力大于背流面壓力,舵葉兩面存在壓力差,在舵壓力作用下會使浮標產生回轉力矩,一定程度上減輕浮標的旋轉程度。

圖9 可拋棄式微型浮標壓力圖
3.3.3 帶有不同展弦比舵葉的微型浮標流體分析比較 為了確定微型浮標所帶舵葉的最佳尺寸,對帶有不同展弦比舵葉的微型浮標進行仿真。圖10是在來流攻角為45°,流速為0.35 m/s,舵葉展弦比分別為0.5,1,1.5和2的微型浮標的速度矢量圖。
翼端效應會使舵葉尾部產生尾渦系,并產生誘導阻力[18]。圖10顯示,舵葉展弦比越小的浮標,尾渦系越靠近舵葉的尾部,隨著舵葉展弦比的增大,尾渦系會向后推遲,減小了尾渦對舵葉的影響,一定程度上減輕了翼端效應的影響,降低了阻力[19]。所以大展弦比的舵葉舵效更佳,對保持浮標穩定性更有利。
通過仿真研究得出結論:帶減搖鰭和舵葉的微型浮標較圓柱形浮標受力更加均勻,穩定性更好。對帶有不同展弦比舵葉的微型浮標研究表明,舵葉展弦比在0.5~2的范圍內,隨著舵葉展弦比的增加,舵效更佳,浮標穩定性更好。
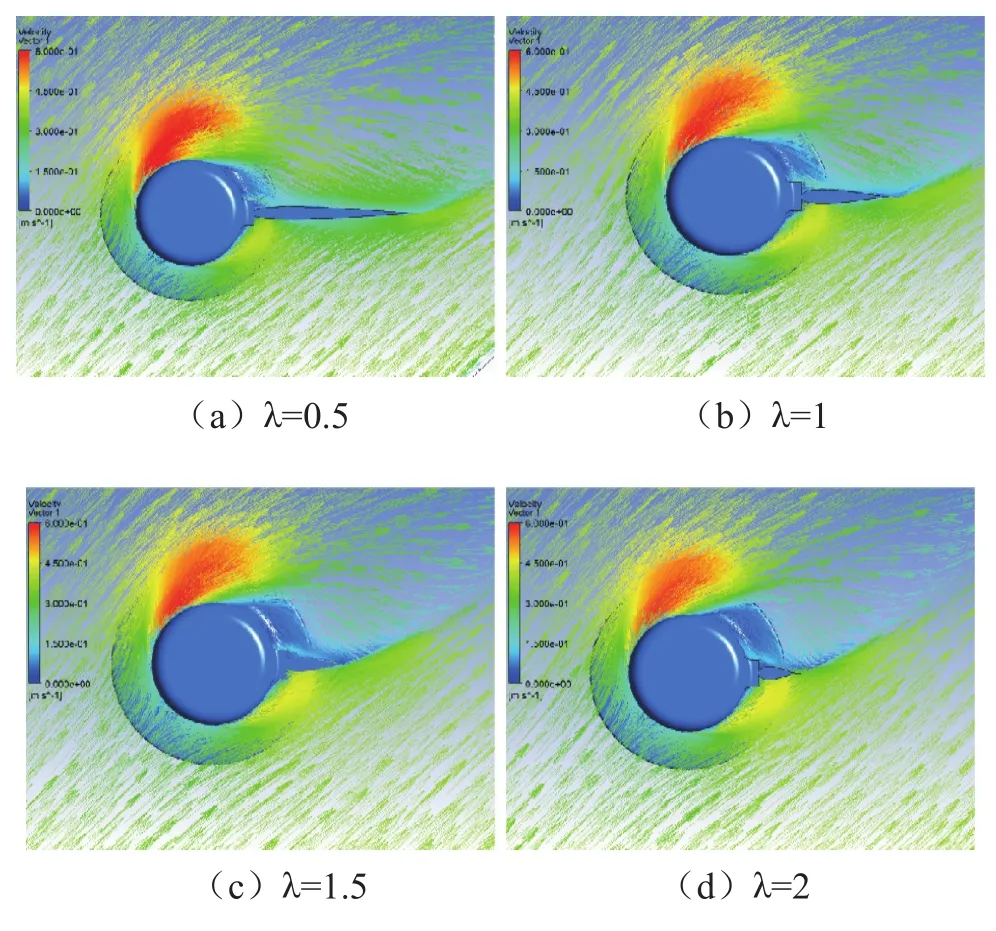
圖10 帶有不同展弦比舵葉的微型浮標速度矢量圖
4 水槽實驗
4.1 實驗過程
本實驗在廈門理工大學實驗水槽中進行。實驗水槽長30 m、寬2 m、水深3 m,如圖11所示。通過調節電機頻率控制進水口流速,并在進水口處放置穩流管,減輕由于水頭差及瞬間流量過大造成的水體紊亂,保證均勻來流。同時調節轉子測速裝置,使測速轉子與浮標在同一水平,當流場測速裝置所測斷面流速穩定在0.35 m/s時開始實驗。如圖12所示為帶舵微型浮標與無舵微型浮標實物圖,浮標內部裝有配重塊、電池、電路板,天線豎直伸出,保證信號的穩定。實驗過程中,將微型浮標進行編號并作上標記,同時在無舵浮標的上蓋上標記方向性箭頭,以便觀測浮標的旋轉程度。在距離進水口2 m處開始布放浮標體。實驗通過記錄浮標漂浮18 m距離過程中旋轉的總圈數判斷舵效。

圖11 30 m水槽

圖12 帶舵浮標(左)與無舵浮標(右)實物圖
4.2 實驗數據及分析
本文開展了兩組實驗,第一組是測試并比較有舵浮標與無舵浮標的旋轉程度,實驗過程如圖13所示,圖左側為無舵浮標,右側為帶舵浮標,浮標漂浮一段時間后,有舵浮標還未發生旋轉,而無舵浮標已經旋轉了1.25圈。第二組是對舵葉展弦比分別為0.5, 1, 1.5, 2的浮標旋轉程度進行測試并比較。實驗數據如表2所示。
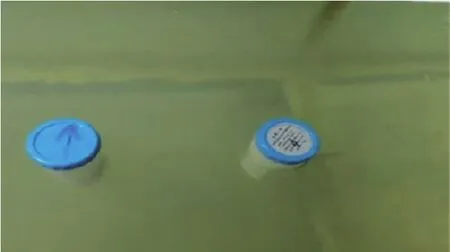
圖13 浮標實驗圖
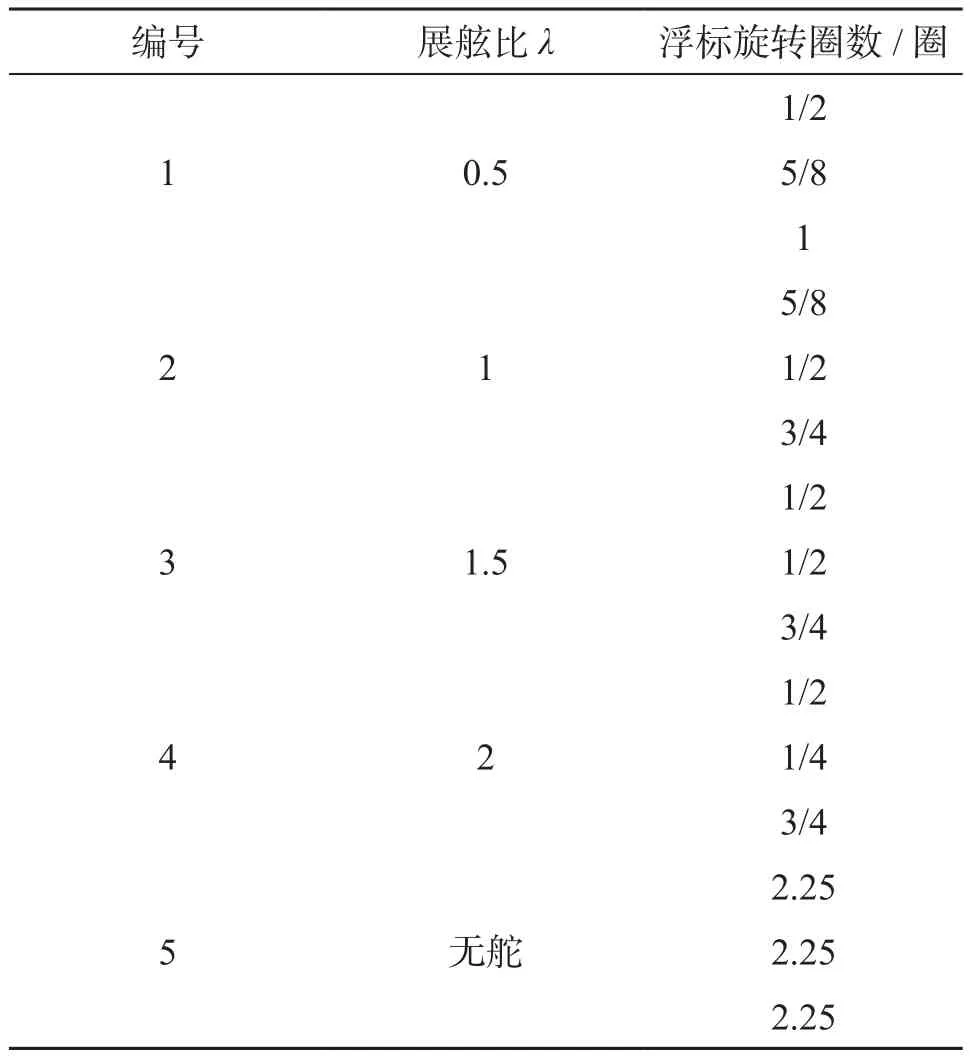
表2 微型浮標所測流速與旋轉程度記錄表
4.3 實驗數據分析和結論
從實驗數據可以看出,無舵浮標旋轉程度明顯大于帶舵浮標,且隨著舵葉展弦比的增加,旋轉程度減小。通過實驗可得出結論:帶舵微型浮標能在一定程度上減輕浮標漂流時的旋轉程度,較無舵微型浮標穩定性更好,能更加精準地反應水流流速和流向。當舵葉展弦比在0.5~2的范圍內時,舵葉展弦比越大,浮標穩定性越好。
5 結 論
為精細化采集海洋表面流水動力學參數,本文提出了一種新型的基于窄帶物聯網LoRa機制無線傳輸的可拋棄式微型浮標,可周期性地獲取位置、流速和浪高等數據,能基本反應海流趨勢,對海洋表層流的研究有實際應用價值。論文還提出了帶舵葉和減搖鰭的結構,以提高浮標的穩定性,通過對該浮標進行Fluent流固耦合仿真和水槽實驗,得出以下研究結論:
(1)比較帶舵浮標和無舵浮標,得出增加舵葉結構能有效減輕微型浮標在水中漂流時的旋轉程度,提高了浮標的穩定性,使浮標能更加精確地反映海流的水動力學參數;
(2)比較帶有不同展弦比舵葉的浮標,得出當流速一定時,來流角度相同時,舵葉展弦比在0.5~2范圍內的微型浮標,隨著舵葉展弦比的增加,浮標的穩定性越好,隨水流同步漂移的準確性越好。可拋棄式微型浮標的發展對海流觀測具有非常積極的意義,也期待其早日大量投入并應用于海洋自然現象、海洋垃圾溯源、船舶溢油、失水人員救助等研究中。