基于PPK無驗潮的水下地形測量技術研究
2021-04-25 06:20:56魏榮灝陳佳兵
海洋技術學報 2021年1期
關鍵詞:測量
魏榮灝,陳佳兵,徐 達
(1.浙江省水利河口研究院(浙江省海洋規劃設計研究院),浙江 杭州310020;2.浙江省河口海岸重點實驗室,浙江 杭州 310020)
水下地形測量的主要任務是確定水下起伏形態,主要內容包括測深和定位。測深主要采用聲吶進行,定位方式主要有光學定位和無線電定位。最早采用六分儀、經緯儀或全站儀等設備通過天文定位或者光學定位的方法確定平面坐標,采用潮位觀測的方式進行驗潮。隨著無線電定位技術的發展,基于全球衛星導航系統(Global Navigation Satellite System,GNSS)的空基定位技術成為水下測量作業的主要定位手段,而實時動態載波相位差分(Real Time Kinematic,RTK)技術因其可實時提供高精度三維坐標的特點使得無驗潮水下地形測量得到了廣泛應用。但是,RTK技術需要通過無線電等方式建立實時數據鏈接以傳輸載波相位差分數據,在實際測量作業中,由于環境的限制,通訊信號容易發生波動乃至丟失,造成差分數據鏈接失效,進而導致定位精度嚴重衰減而無法滿足相關作業規范[1]要求,而無需實時數據鏈接的GNSS載波相位后處理(Post Processing Kinematic,PPK)技術可較好地解決該問題。該技術可望在海洋工程建設、水利工程建設、港口航道建設等方面發揮重要作用。
基于PPK技術獲取高精度三維坐標是當前的研究熱點之一,國外在此方面的工作較少,而國內已經開展了較多研究:汪連賀[2]聯合全球定位系統(Global Positioning System,GPS)的定位信息和慣性測量單元(Inertial Measurement Unit,IMU)姿態信息獲取了瞬時水面高程數據,并在煙臺港進行了工程試驗,結果表明,驗潮距離高達98 km時,驗潮精度仍優于10 cm;趙建虎等[3]基于GPS事后動態處理技術開展了遠距離高精度潮位觀測,對垂直基準面轉換方法進行了研究,并取得了在100 km范圍內的基線距離上,潮位精度優于10 cm的成果;王朝陽等[4]研究了基于PPK和精密單點定位技術(Precise Point Positioning,PPP)的遠距離GNSS潮位測量影響因素,研究結果表明,扼流圈天線可提高觀測質量,且PPP模式下潮位測量精度優于10 cm;杜銳[5]在遠海區域以GPS PPK技術進行了水面高程傳遞的測試工作,結果表明,該技術定位精度可滿足工程需求;王長永等[6]將GPS PPK技術應用于長江口的水深測量工作中,獲得了比傳統驗潮方法更高的作業效率和精度;葉偉等[7]在水庫水下地形測量中對PPK技術進行了應用,較好地解決了山區通訊信號遮擋與控制點距離較遠導致RTK作業無法進行的問題;劉勝震等[8]在呼倫湖中進行了PPK技術的實際應用,結果表明,該技術在對大面積水域進行水下地形測量時,定位精度可達厘米級。Marcelo Santos等[9]研究了海洋環境中PPK算法的解算策略,提出了一種新的天氣延遲模型并改進了解算精度。Jae Young Roh等[10]使用PPK技術處理GNSS浮標觀測數據,結果表明,浮標觀測水位與驗潮站觀測水位之差小于±2 cm。
目前,國內相關研究主要基于GPS進行,缺少對不同GNSS系統及其組合解算策略的精度評估。此外,針對入海口等海洋環境的PPK解算精度和穩定性的驗證工作也較少,同時國內PPK技術的研究應用領域主要集中于內陸水域,在近海岸特別是杭州灣等強潮河口的應用研究較為少見。為此,本文首先采用不同的GNSS PPK解算策略,對靜態比測進行精度和穩定性驗證工作,然后使用多GNSS聯合解算方法進行了動態比測。比測結果表明,基于不同GNSS系統及其組合的PPK技術的定位精度能滿足實際工作需要。最后,在杭州灣涌潮河口的大橋航道監測工作中進行了推廣應用,實例結果表明,該技術可為水下地形測量提供技術支撐。
1 PPK無驗潮技術原理
PPK無驗潮技術主要由兩部分組成,第一部分是采用載波相位技術獲取高精度的三維坐標成果,第二部分是采用相關的高程轉換技術實現潮位控制。
1.1 載波相位差分原理
載波相位差分技術的原理是利用GNSS觀測誤差在時間和空間上的強相關特性,通過對基準站和流動站的原始載波相位觀測數據進行雙差計算,消除接收機和衛星時鐘的偏差、衛星誤差以及大部分的電離層、對流層延遲的影響,達到厘米級的定位精度[11]。
研究者可以從至少兩個相隔某一固定距離(稱為基線)的GNSS接收機中獲得相似的測量值組合,將從兩個接收機得到的相似的測量值形成線性組合(差分),就有可能消除兩個接收機共有的誤差,這樣的一個組合稱為單差。對來自同一顆衛星的兩個單差測量值進行求差,就可以得到雙差。利用雙差技術處理載波相位觀測值,就可以消除大部分的誤差源[12]。通過單差消去了衛星星歷誤差、發射信號的相位和時鐘偏差,如果接收機同緯度且相距較近(基線小于50 km),電離層和對流層的大部分誤差也消除了。形成雙差后,接收機時鐘偏差被消去了,僅剩下相位項、整數項和系統相位噪聲項。
1.2 PPK無驗潮測量原理
PPK技術可通過后處理得到厘米級的測點三維坐標,高程數據一般是CGCS2000(China Geodetic Coordinate System 2000)的大地高數據,處理時需要將大地高轉換至目標基準的高程數據,如85高程基準,其原理如圖1所示。
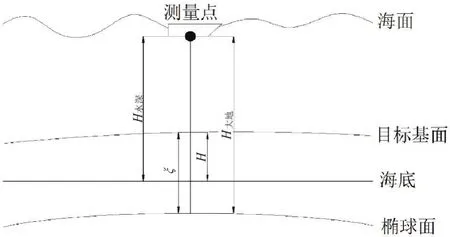
圖1 PPK無驗潮測量原理
水底相對于目標基面的高程可表示為:

式中:H為海底到目標基面距離;H水深為經過天線高改正和吃水改正之后的水深測量值;H大地為該點到大地水準面的距離;ξ為高程異常值。問題的關鍵在于獲取準確的高程異常數據。在小范圍的測量中可采用七參數來進行高程轉換,大范圍則可以使用區域似大地水準面精化進行[13]。
2 精度分析與驗證
為了驗證PPK在水上作業的穩定性和可靠性,有必要對PPK解算結果的精度、可靠性和穩定性進行分析。但水上作業時測點是在不斷運動的過程中獲取的,無法像陸地作業時長時間多次重復測量得到多組數據進行平差,因此首先在陸地上選取已知高等級控制點,按照水上作業的數據采集設置進行靜態比測,對PPK解算結果的精度、可靠性和穩定性進行評估,然后采用同一GNSS天線,由兩臺同型號GNSS接收機在船舶上分別進行RTK和PPK觀測,假定RTK結果為真值,根據時間戳匹配的方式比較RTK與PPK解算結果的偏差。
本文采用的衛星定位系統包括全球定位系統、格 洛 納 斯(Global Navigation Satellite System,GLONASS)、北斗衛星導航系統(BeiDou Navigation Satellite System,BDS)、伽利略衛星導 航 系 統(Galileo Satellite Navigation System,Galileo)和準天頂衛星系統(Quasi-Zenith Satellite System,QZSS)。
2.1 靜態比測
驗證時選取了5個控制點同時進行觀測,選取其中一個控制點架設GNSS流動站,其他4個控制點作為基準站,與其距離約為5 km、10 km、15 km和20 km。根據常規作業配置,一般在基準站和遠距離移動作業時選用大地型GNSS接收機,其他則使用普通GNSS接收機。因此,在流動站和距離流動站20 km的兩個觀測點位采用Trimble R9S大地型GNSS接收機,并采用Zephyr Model 2 Geodetic型衛星天線進行觀測,其他點位采用Trimble R8S型接收機進行靜態比測。所有的GNSS接收機統一觀測設置,記錄所有可見衛星(GPS、GLONASS、BDS、Galileo和 QZSS) 的多頻數據(如GPS記錄L1、L2和L5),衛星截止高度角設置為15°,每秒記錄一個觀測數據。
完成觀測后,以Trimble的T02格式下載所有GNSS接收機的原始觀測數據并導入Trimble Business Center(TBC)軟件進行后處理,后處理時設置衛星截止高度角為15°,采用多頻數據處理不同的衛星信號,并分別選用單星、雙星和多星組合進行,PPK解算結果與控制點較差統計結果見表1至表7。由于各測站開始和結束的時間略有差異,因此選取同步觀測數據進行統計分析,所有的解算模式都得到了3 900個有效解。
由表1至表7可見,在僅使用一個GNSS星座的情況下,GPS解在大部分條件下略優于BDS衛星的解算結果,但兩者處于同一量級,所有的平面標準差都處于毫米的量級,垂向的標準差處于厘米量級;比較特殊的是BDS解算結果在20 km處平面標準差最小,且垂向標準差優于15 km解算結果,其主要原因是觀測設備不同造成的,在20 km處使用的大地型天線配合大地型GNSS接收機,其性能優于其他測點。使用多個GNSS星座的解算結果明顯優于僅使用1個GNSS星座的解,但2個、3個、4個及5個的GNSS星座組合的結果沒有顯著的差異,平面標準差都小于1 cm,垂向標準差基本都小于1 cm。因此建議在PPK作業時,同時觀測所有的GNSS星座,并盡量使用大地型GNSS接收機進行觀測。
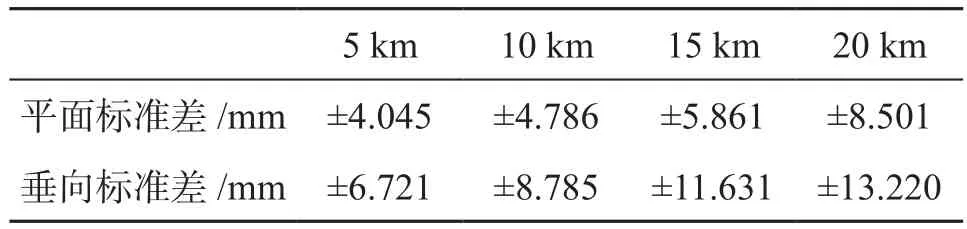
表1 GPS靜態比測數據統計表
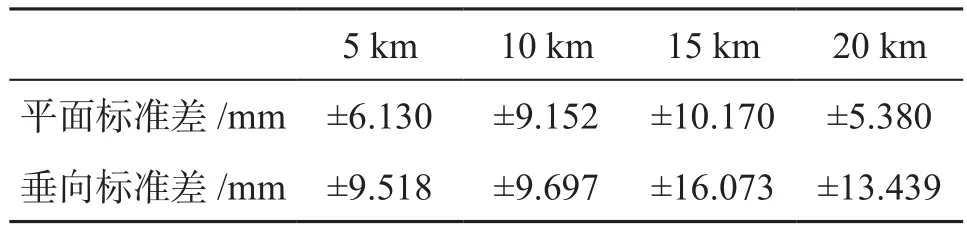
表2 BDS靜態比測數據統計表
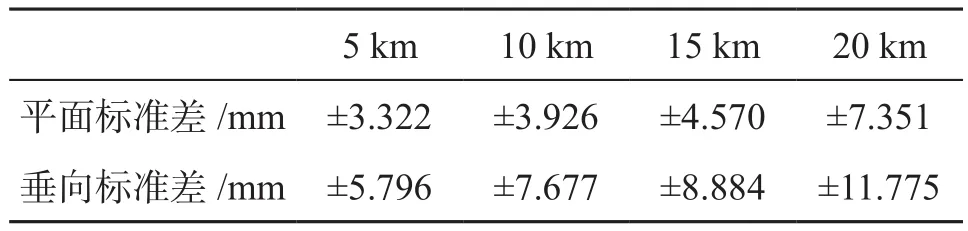
表3 雙星靜態比測數據統計表(GPS+GLONASS)

表4 雙星靜態比測數據統計表(GPS +BDS)
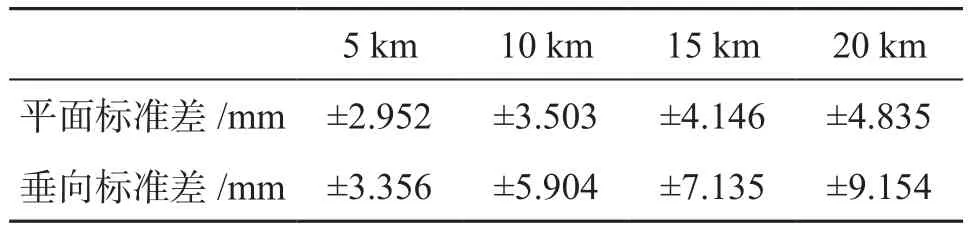
表5 多星靜態比測數據統計表(GPS+GLONASS+BDS)
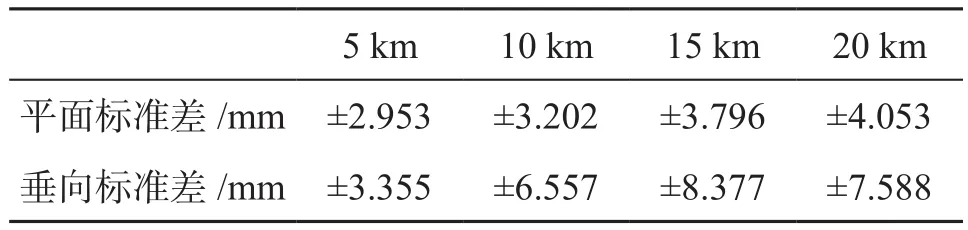
表6 多星靜態比測數據統計表(GPS+GLONASS+Galileo+BDS)
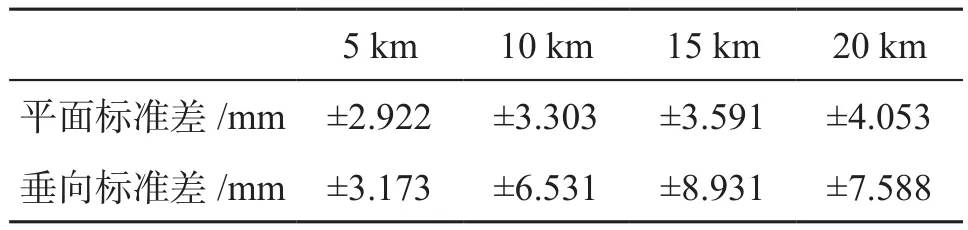
表7 多星靜態比測數據統計表(GPS+GLONASS+Galileo+BDS+QZSS)
在不同距離觀測5個星座得到的PPK解與控制點較差結果如圖2所示。從箱型圖中可以看出,不同距離的北向、東向和垂向較差都在±5 cm之內,數據分布較為集中,未出現偏差超過5 cm的點。同時,計算得到的平面和三維位置較差基本都小于5 cm。可見在1 Hz觀測條件下PPK解算結果較為穩定,具備應用于水上移動作業的能力。
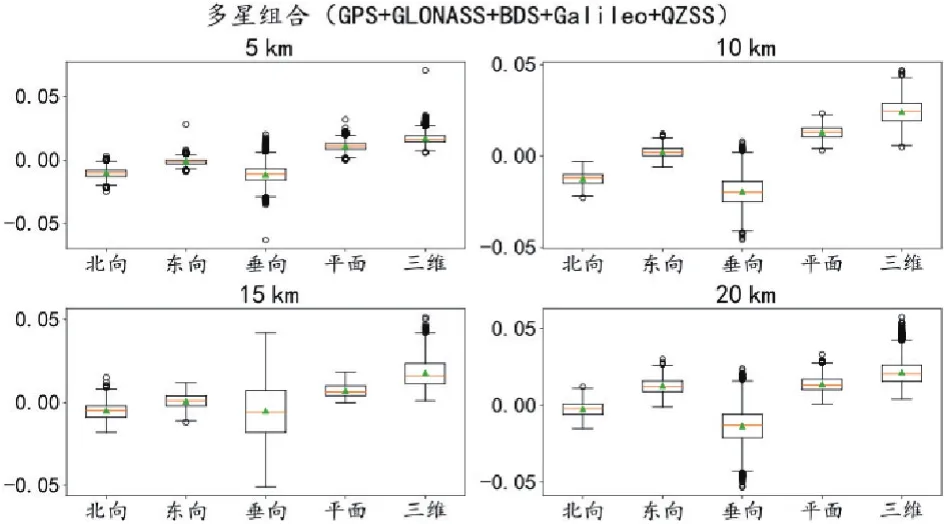
圖2 不同距離下多星組合各方向較差(單位:m)
2.2 動態比測
采用船載移動測量的方式對移動測量的精度進行動態比測。在已知控制點上架設GNSS基準站,并在船舶上架設GNSS流動站,在杭州灣河口區域進行測試。所有測站都采用Trimble R9S大地型接收機和Zephyr Model 2 Geodetic型衛星天線進行觀測:以10°的衛星截止高度角采集數據,觀測5個衛星星座并按1 Hz頻率記錄原始數據,同時采用基于浙江省連續運行衛星定位綜合服務系統(ZJCORS)的網絡RTK(使用GPS與GLONASS的雙星組合)進行三維定位,使用手簿記錄RTK定位結果。野外數據采集結束后,分別下載GNSS基準站和流動站的T02原始觀測數據,采用TBC軟件進行后處理。
以RTK定位結果為基準,將PPK處理結果通過時間戳匹配后與RTK定位結果求差,其結果如表8所示。從表中可見,各個統計量的中位數與平均值基本一致,數據偏差較小。平面與三維定位結果的標準差都處于厘米量級,同時,各個定位分量較差的平均值都處于厘米的量級,可見RTK與PPK定位結果的一致性較好。
表8中的垂向和三維定位結果較差最大值分別為16.00 cm和17.27 cm,表明仍存在部分數據較差大于10 cm。對數據進行分析,較差超過10 cm的點主要位于測區內橋梁附近,僅使用GPS與GLONASS雙星組合基于ZJCORS的網絡RTK技術受橋面遮擋,觀測衛星數較少導致定位結果不佳。
3 實例應用
測區位于杭州灣口澉浦段附近,該航道河勢變化受上游徑流和下游潮流的雙重影響。由于河床寬淺、潮強流急,漲落潮流路存在較大差異。實測最大涌潮流速約為12 m/s,潮位瞬間最大漲幅2 m以上,實測最大涌潮壓力70 kPa。雖然航道所處江道水域最窄僅有約8 km左右,但由于處于涌潮區域且兩岸主要為淺灘,基本無法布設驗潮站;所處位置的無線電信號一直較差,采用RTK方式作業時數據鏈接丟失嚴重,因此采用PPK技術結合單頻測深儀進行水下地形測量工作。
數據采集共獲取7 072個定位數據,實時獲取定位數據(含單點解與浮動解)、PPK定位數據的定位較差如表9所示。從表中可見,野外測量時由于經常發生RTK信號丟失的問題,因此北向、東向實時定位與PPK定位的結果較差的絕對值最大達到了18.569 m和33.430 m,垂向的較差絕對值最大超過了75.932 m,該數據已經完全超出了GNSS系統的單點定位精度,主要由于大橋附近GNSS信號被遮擋及RTK改正信號丟失導致。從平面和三維的定位較差的標準差來看,都已經超過了米級的量級,可見丟失RTK差分信號對定位結果的影響是巨大的。
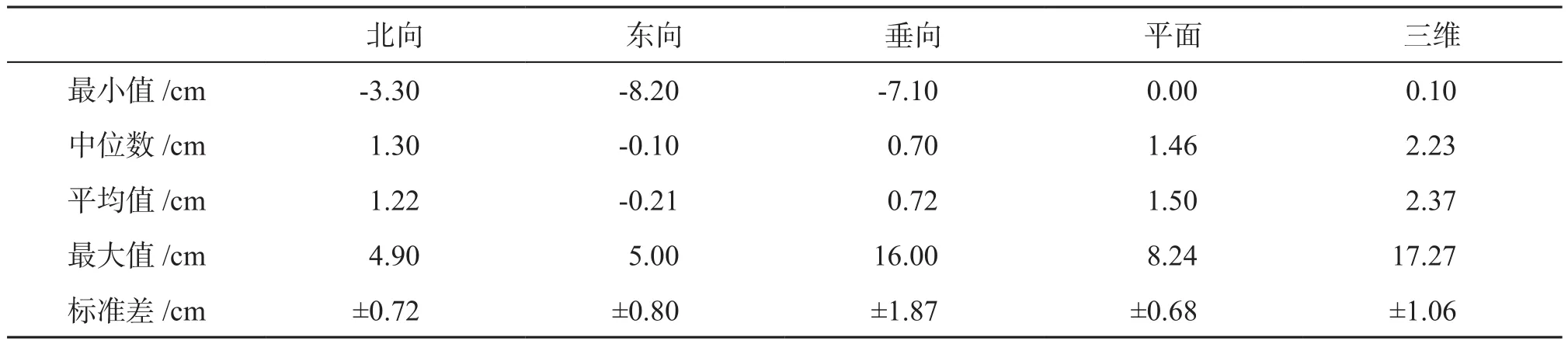
表8 定位結果比較
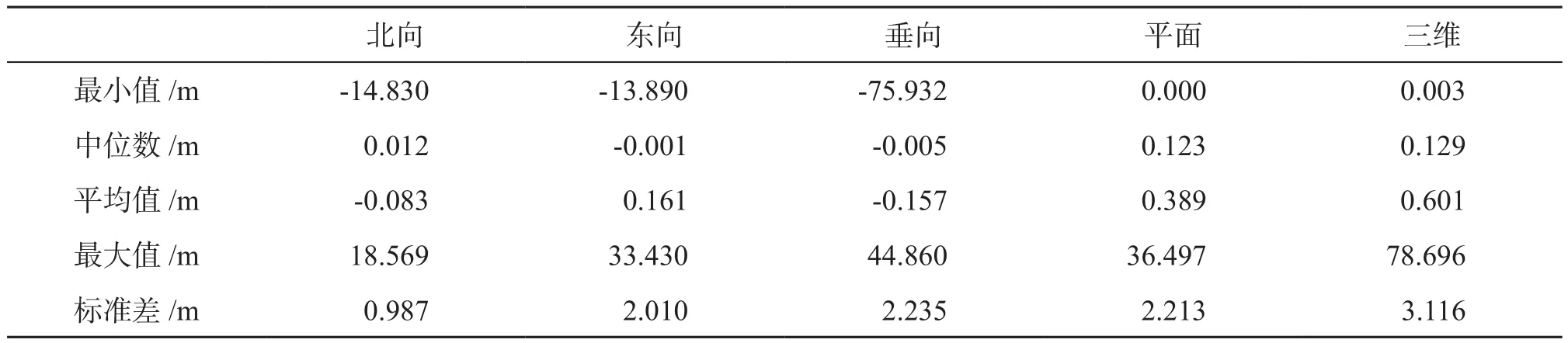
表9 實時與PPK定位結果較差表
由于RTK實時信號與PPK信號的定位結果差距較大,因此使用測區附近已有的高程異常模型將RTK與PPK獲取的高程數據轉換至85國家高程基準后,與同步觀測的潮位數據進行驗證。圖3繪制了作業期間某天的RTK實時潮位、PPK潮位、南北岸和通航孔的潮位站的潮位過程線。從圖3上可見RTK實時潮位與PPK解算結果基本是一致的,而丟失RTK差分信號的實時定位潮位數據發生了較大的振蕩,已經無法滿足RTK三維水深測量的技術要求。PPK潮位與該區域布置的三個潮位站的數據能夠較好的吻合,其計算結果可以滿足在該區域中進行RTK三維水深測量的精度要求。
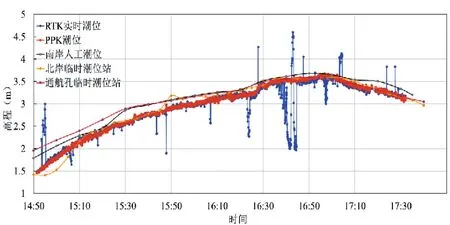
圖3 RTK實時潮位、PPK潮位與潮位站潮位數據比較圖
4 結 論
本文基于載波相位觀測原理介紹了載波相位差分技術,通過靜態和動態比測的方法進行了精度和穩定性測試后,在杭州灣涌潮河口進行了實際應用,主要結論如下:
(1)靜態比測結果表明,20 km距離內現有GNSS系統的PPK解算結果都能符合相關規范要求;動態比測結果表明,RTK和PPK解的一致性較好,平面與三維定位結果的標準差都處于厘米量級。靜態比測結果表明,在20 km距離內,現有的GNSS系統都能提供滿足相關規范要求的定位結果,多個GNSS系統的聯合觀測解能提供精度更為穩定的結果;(2)實際應用中PPK解算結果精度可滿足RTK三維水深測量的技術要求,能較好地解決RTK差分信號丟失時定位精度嚴重下降的問題,具有較大的應用潛力;(3)后續有必要在延長測試距離的基礎上對更多影響PPK解算結果的因素進行研究,并開展聯合RTK和PPK的水下地形測量技術研究。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00