形狀記憶合金絲驅動的可彎曲孔探儀機構設計?
2021-04-28 16:18:22蘆吉云
振動、測試與診斷 2021年2期
潘 浩,熊 克,蘆吉云,王 容
(1.南京航空航天大學機械結構力學及控制國家重點實驗室 南京,210016)
(2.南京航空航天大學民航學院 南京,211106)
引言
高新技術的采用使航空發動機結構越來越復雜,這對航空發動機內部損傷探測提出了更高的要求[1-3],研究發動機損傷探測新技術十分必要。目前發動機維修主要依賴孔探檢測法,利用孔探設備搭載的內窺鏡觀測發動機內部故障,由于孔探儀存在柔性不足、可達性差、操作困難、效率低下等問題[4-5],增加孔探設備的柔性是必須解決的問題。
隨著精密加工技術、微機電系統、微驅動及特殊材料等技術的進步,機構驅動技術迅速發展。Glozman等[6]提出一種能夠脹縮的自驅動式蠕動管道機器人機構,通過多個彈性氣囊膨脹和收縮來使得機體蠕動行走,對控制算法的要求較高。Laschi等[7]基于章魚的生物力學研制了一種軟體魚機構原型,能向前游動、轉彎和姿態調整。Tolley等[8]利用硅彈性體、聚芳綸織物以及中空玻璃微粒研制了一種氣動機構,用機構內的壓縮空氣網提供動力,該方法需要發展新型材料,對控制系統要求較高。Dong等[9]研究一種由柔性關節連接的蛇型機構,采用多段式結構,利用電機進行驅動。
針對可彎曲機構的設計,國內外學者采用微型電機、壓電、形狀記憶合金材料以及氣動驅動方式實現機器人的運動。壓電驅動器發熱大、功耗大;氣動驅動方式需要發展新型材料,對控制系統要求較高。形狀記憶合金與微電機是目前廣泛采用的小型機器人驅動方式。形狀記憶合金具有獨特的形狀記憶效應和超彈特性,廣泛應用于航空航天、醫療、自動化與土木工程領域[10-12],具有結構簡單、體積小、質量輕、能量密度高、應變大及柔性高等優點[13]。作為一種良好的作動元件,雙程的SMA絲是一種在電流驅動下會像肌肉一樣收縮、卸載電流冷卻到室溫時又會恢復到原長的新型小直徑形狀記憶合金絲。針對形狀記憶合金驅動機構,Mao等[14]利用形狀記憶合金彈簧驅動仿海星機器人,Lin等[15]將形狀記憶合金縱向嵌入柔性聚合物中模擬縱向肌肉纖維功能,從而使微型機器人實現滾動運動。
筆者設計一種由雙程SMA絲驅動的可彎曲孔探儀機構,旋轉對稱分布的4根SMA絲作為核心驅動元件驅動球軸承轉動和彈簧彎曲。本研究搭建SMA絲驅動特性測試平臺用以研究SMA絲的驅動特性。文中還建立可彎曲孔探儀機構的運動學模型,計算出機構末端搭載的光學鏡頭的運動軌跡。此外,筆者組裝出孔探儀機構的實體,測試機構的運動軌跡,并對孔探儀彎曲角度進行控制試驗。
1 可彎曲孔探儀的機構設計
為了實現孔探儀自主彎曲的工作要求,文中提出的可彎曲機構3D模型和剖面圖如圖1所示。孔探儀機構的外直機為20 mm,長度為120 mm,質量為65 g,包括球軸承、上接口、形狀記憶合金絲、彎曲彈簧、預緊彈簧和下基座。球軸承結構中空,內部安裝的高清鏡頭可拍攝發動機內部結構損傷情況。

圖1 孔探儀機構Fig.1 Structure of hole detector
結構主要實現空間彎曲,將4根直徑為0.5 mm,長度為100 mm的SMA絲距結構中心軸線4.5 mm旋轉對稱分布,SMA絲可通過施加電流加熱而產生收縮,且收縮長度可通過調節電流大小來控制。SMA絲兩端分別和球軸承內部滾珠、底部滑塊剛性連接,保證SMA絲的作動位移傳遞給球軸承用以產生周向位移。預緊彈簧與底部滑塊預緊固定,提供SMA絲工作狀態下必要的預緊力。
孔探儀中間段是1根彎曲彈簧連接上接口與下基座,SMA絲的作動位移傳遞給彎曲彈簧從而使整個結構產生彎曲,當電流卸載時,具有一定剛度的彎曲彈簧又可以使整個結構盡快回復到初始位置。預緊彈簧和彎曲彈簧的結構參數如表1所示。

表1 彈簧結構參數Tab.1 Spring structure parameter mm
2 彎曲機構運動學建模
筆者設計的孔探儀結構由SMA絲驅動而產生的運動是一個對稱的兩自由度的運動,所以機構的運動學模型可以建立在平面直角坐標系中。孔探儀機構的運動學模型分析過程作以下假設:①探頭在運動過程中,球軸承旋轉不存在摩擦力,球軸承的旋轉先于彈簧的彎曲;②在彈簧單元彎曲過程中,中心支撐彈簧彎曲軸線長度保持恒定,且為等曲率圓弧;③機構在運動過程中只承受SMA絲作動收縮而產生的位移載荷。
2.1 球軸承運動學分析
球軸承單元的空間轉動形態如圖2所示。為了便于運動學模型的建立和分析,在球軸承轉動臂和基座頂面上分別建立旋轉坐標系[x1,y1]和上接口坐標系[x2,y2],原點分別是轉動中心O和上接口上端面中心。SMA絲在作動收縮過程中,球軸承以點O為中心轉動,單元的轉動可以用偏轉角度α描述。限位孔A,B在旋轉坐標系[x1,y1]的坐標表示為[4.5cosα,-4.5sinα]和[4.5,-15],A,B之間的距離與SMA絲收縮量Δl存在式(1)關系,由式(1)可以計算出旋轉角α
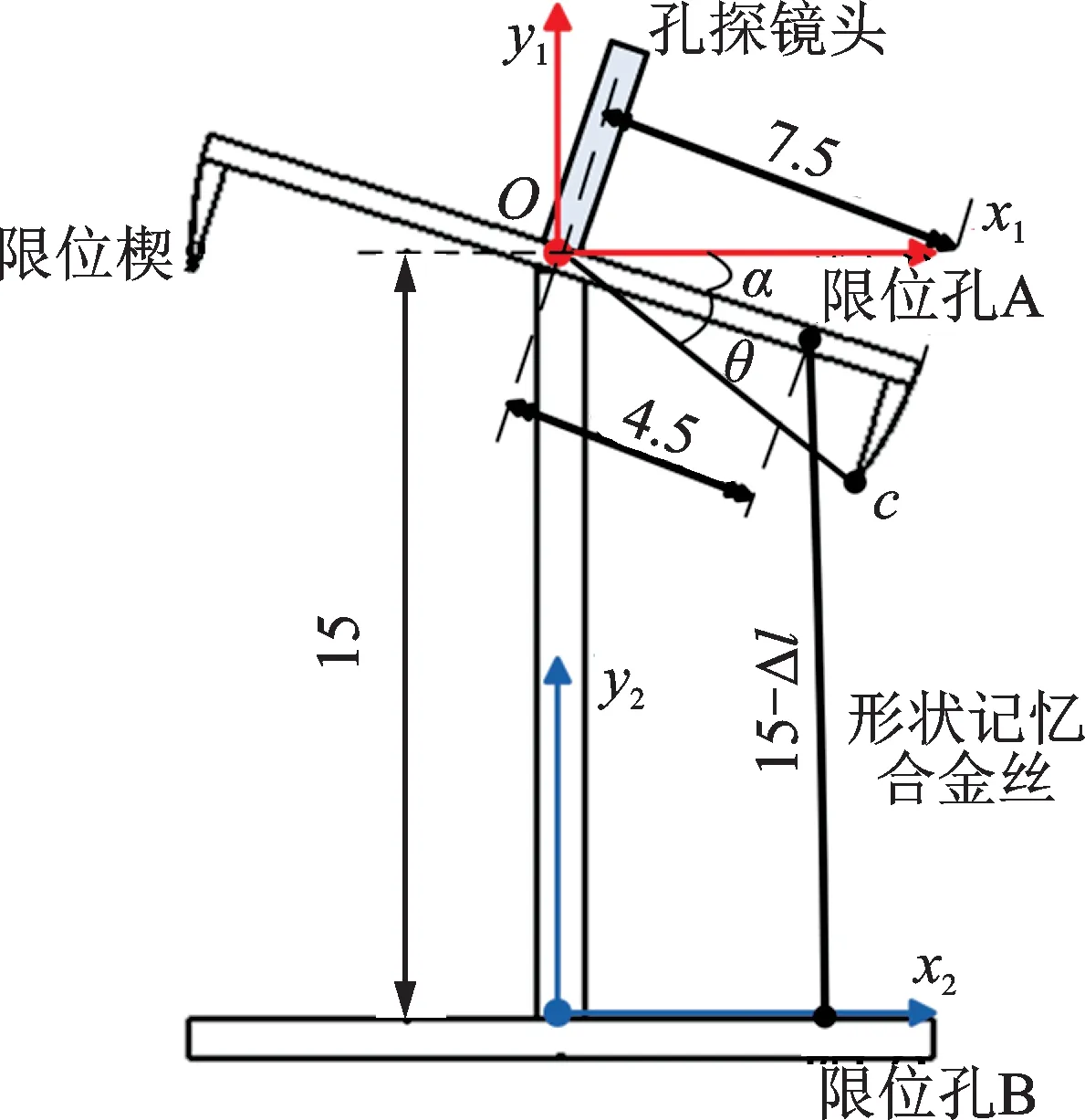
圖2 球軸承單元的轉動形態及其坐標系(單位:mm)Fig.2 Rotational form and coordinate system of ball bearing unit(unit:mm)

球軸承搭載鏡頭的軸線在轉動中心點垂直于轉動臂,鏡頭端點在旋轉坐標系[x1,y1]下的最終位置坐標A1可以表示為式(2),其中鏡頭端點初始位置坐 標A0=[x0y01]=[0 7.5 1],10Τ為 初 始位置到旋轉后最終位置的變換矩陣

球軸承單元旋轉坐標系上的點映射到基坐標系中可以用變換矩陣表示只與球軸承的支撐軸長度l有關,見式(3),其中l=15 mm。

基坐標系下,鏡頭端點位置坐標A2可以由式(4)計算

球軸承的最大旋轉角度由限位楔決定。球軸承轉動過程中,限位楔與張緊的SMA絲抱死,限位楔頂點C與限位孔A,B三點共線,表示為式(5)

球軸承達到最大旋轉角。C點在旋轉坐標系下坐標表示為(7.5cos(α+θ),-7.5sin(α+θ)),其中θ=20°。由式(5)可以得最大旋轉角α0=39.79°。
將α0=39.79°代入式(1),得到球軸承旋轉到最大角度時,SMA絲的收縮量Δl0=2.83 mm。
2.2 彎曲彈簧單元運動學分析
球軸承單元旋轉到最大角度時,SMA絲存在殘余收縮量Δl',此時的殘余收縮量引起彈簧的彎曲。如圖3所示,根據假設2建立彈簧彎曲變形模型。在彈簧中心軸兩端分別建立轉動坐標系[x3,y3]和基坐標系[x4,y4],原點分別是上接口下底面中心和下基座上端面中心,x軸都指向等曲率圓弧中心。角度β和中心軸長度可以完全定義等曲率圓弧的外形。
關于角度β,存在有以下關系

其中:L為彈簧中心軸長度;R為等曲率圓弧半徑。
由式(6)~(7)可以解得等曲率圓弧半徑R和中心角β。轉動坐標系[x3,y3]和基坐標系[x4,y4]關于中心O對稱。平面內點位置在轉動坐標系下的

圖3 彎曲彈簧單元的彎曲形態及其坐標系(單位:mm)Fig.3 Bending form and coordinate system of curved spring unit(unit:mm)
坐 標 系[x2,y2]和[x3,y3]分 別 建 立 在 上 接 口剛體的上下兩個端面,其坐標轉換可以用式(9)表示

根據假設1,球軸承的旋轉先于彈簧的彎曲,當SMA絲收縮量小于2.83 mm時,彈簧不發生彎曲;當SMA絲收縮量大于2.83 mm時,球軸承旋轉到最大角度后,殘余的收縮量Δl'引起彈簧彎曲。

根據式(1)~(10),驅動機構在坐標系[x4,y4]下的運動軌跡可以表示為

其中:α,β,R由式(1,6,7,10)解得。
孔探儀機構的可達空間通過孔探儀搭載的光學鏡頭末端中心點的運動軌跡描述,利用Matlab繪制鏡頭中心點運動軌跡見圖4,可以看出,機構的可達空間為傘蓋形狀,最大彎曲角度為28.3°。

圖4 孔探儀機構的可達空間仿真分析Fig.4 Workspace simulation of the hole detector
3 孔探儀驅動機構彎曲試驗
3.1 SMA絲特性測試
可彎曲孔探儀機構的作動元件是SMA絲,機構的運動學特性與SMA絲的作動特性相關。本研究采用了北京記一公司所生產的直徑為0.5 mm的900型雙程形狀記憶效應SMA絲,搭建了如圖5所示的SMA絲作動特性測試試驗平臺,測試了SMA絲的收縮率、溫度、帶載能力及循環特性等參數。
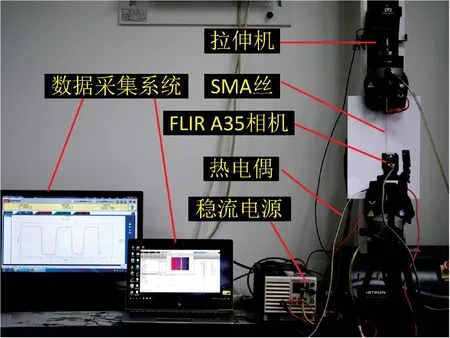
圖5 SMA絲作動特性試驗平臺Fig.5 Test platform of SMA wire actuation characteristic
測試采用INSTRON 3343B11502萬能試驗機,試驗采用力保持方式,穩定SMA絲的載荷為0.5 N,保持SMA絲張緊。試驗機自帶力傳感器和位移傳感器,可得SMA絲的位移-時間以及力-時間的關系。采用KEITHLEY 2260B-30-72直流穩流電源供電。試驗環境溫度為20℃,濕度為RH50%。
收縮和回復性能是SMA絲能否作為作動器使用的重要標準之一,SMA絲在作動過程中達到滿足工作要求的行程同時,也要具備良好的收縮回復特性。筆者設計的驅動機構采用直徑為0.5 mm SMA絲(標距長為200 mm)的4個工作周期的位移-時間曲線如圖6所示。根據焦耳熱效應加熱SMA絲,當施加工作電流,SMA絲開始收縮,馬氏體向奧氏體快速轉變,位移曲線下降,當馬氏體逆相變趨于完成時,SMA絲不再收縮。斷開電流,SMA絲開始回復原長,奧氏體向馬氏體轉變,位移曲線上升。可以看出:SMA絲的平均收縮位移為8.04 mm,收縮率為4.02%;SMA絲具有良好的循環特性,并且每次收縮和回復之后的位移都基本處于-8和0 mm左右;SMA絲具有穩定的收縮狀態。
由于預緊彈簧、彎曲彈簧存在一定剛度,驅動機構內部SMA絲作動是處于負載狀況下的,SMA絲作動器的帶載能力也是本試驗關注的重點。SMA絲相變回復力如圖7所示。施加電流時,SMA絲兩端產生相變回復力,當處于完全收縮狀態時,相變回復力有所波動,波動范圍為73.49~90.01 N,平均值為83.23 N。最小相變回復力73.49 N可以滿足機構的驅動力要求。SMA絲具有超彈性,在外力作用下,超過彈性極限的應力誘發奧氏體形成馬氏體,而在溫度作用下,馬氏體又向奧氏體轉變,合金絲中奧氏體成分不斷變化導致作動力的波動。
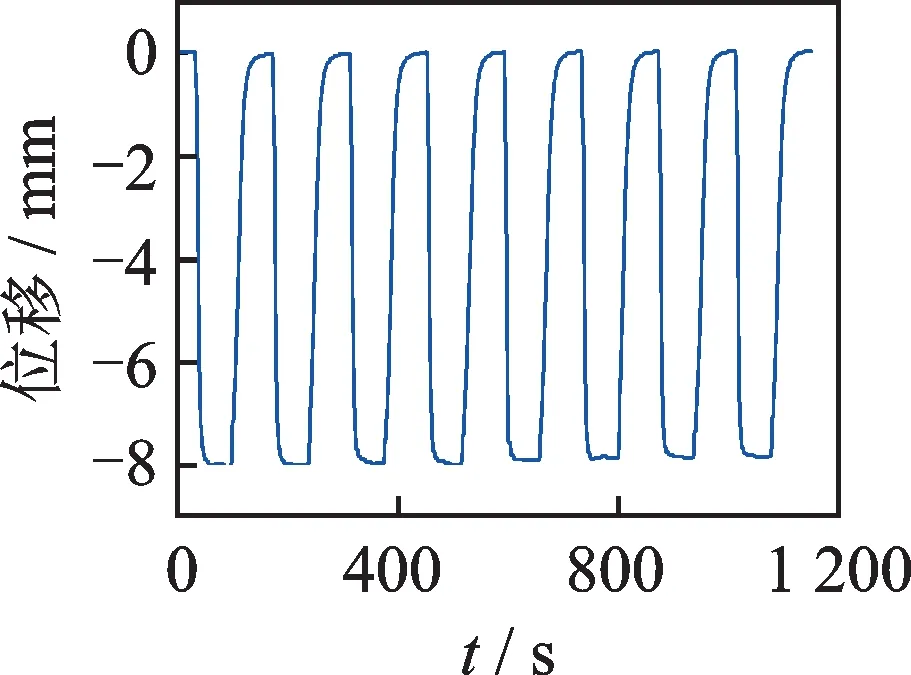
圖6 SMA絲位移-時間圖Fig.6 Displacement-time curve of SMA wire

圖7 SMA絲作動力圖Fig.7 Driving force of SMA wire
為了驗證SMA絲在帶載情況下的穩定性,圖8給出了SMA絲在不同帶載力下的作動位移-時間曲線。在帶載為0.5,10,20,30,40 N的情況下,SMA絲3個周期循環作動曲線非常接近,初始值不同的原因是因為載荷不同使初始位移也隨之改變。由圖可見,SMA絲具有良好的收縮率及循環重復性。

圖8 SMA絲帶載位移-時間圖Fig.8 Displacement-time curve of loaded SMA wire
為了實現可彎曲孔探儀的彎曲控制,圖9(a),(b)分別給出了SMA絲的溫度-工作電流曲線圖和收縮率-工作電流曲線圖。由圖可知,在不同的工作電流下,SMA絲趨于穩定時的收縮率不同,且工作電流越大,收縮也越大。
3.2 驅動機構運動學試驗
為了驗證孔探儀機構的仿真分析結果,獲得機構準確的可達空間,搭建了如圖10(a)所示的試驗測試平臺。直流穩流電源用于驅動機構中SMA絲,使結構產生彎曲運動。基座將孔探儀機構垂直固定,KEYENCE LK-G155激光位移傳感器測量孔探儀前端搭載光學鏡頭的空間位置。驅動機構在運動終點的實際變形狀態如圖10(b)所示。

圖9 SMA絲收縮率圖Fig.9 Shrinkage curve of SMA wire

圖10 運動學測試平臺Fig.10 Kinematics test platform
驅動機構的實測可達空間由機構末端搭載鏡頭在2.2節中建立的基直角坐標系下表示。圖11為鏡頭位置坐標值x,y和驅動機構彎曲角度變化的曲線。紅色曲線代表激光位移傳感器測量的實測值,黑色曲線代表運動學模型計算的仿真值。
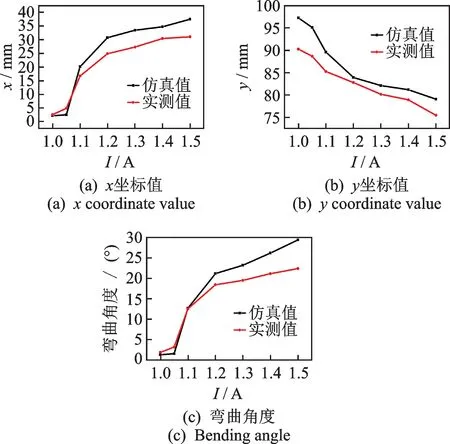
圖11 鏡頭位置-電流圖Fig.11 Position-current curve of lens
由圖11可以看出,鏡頭位置參數的實測值和理論值隨電流變化而變化的趨勢相同,實測的最大彎曲角度為22.3°,理論最大彎曲角度為28.3°,相對誤差為26.9%。在初始位置時,孔探儀搭載鏡頭y坐標的理論值大于實測值,這是由于孔探儀上端部件具有自重和SMA絲裝配導致彎曲彈簧壓縮,使得鏡頭高度較理論值略有降低。鏡頭x坐標的實測值始終小于理論值,其原因是彎曲彈簧具有一定的剛度,SMA絲在驅動彎曲彈簧彎曲的過程中受彈簧的反力作用,降低了SMA絲收縮驅動的工作效率。
在孔探儀彎曲機構的俯視圖中建立坐標系[x,y],原點為機構的對稱中心,x軸和y軸分別經過1號孔和4號孔中心,如圖12所示。圖13給出了彎曲機構在坐標系[x,y]第1象限中彎曲形態(1號孔有綠色標記),其中角度表示彎曲機構軸線在坐標系中的投影線與x軸的夾角。通過控制1,4號絲的長度,可以實現機構在第1象限內的徑向彎曲和周向偏 轉,給4根SMA絲 供 電,可 實 現 周 向360o的偏轉。
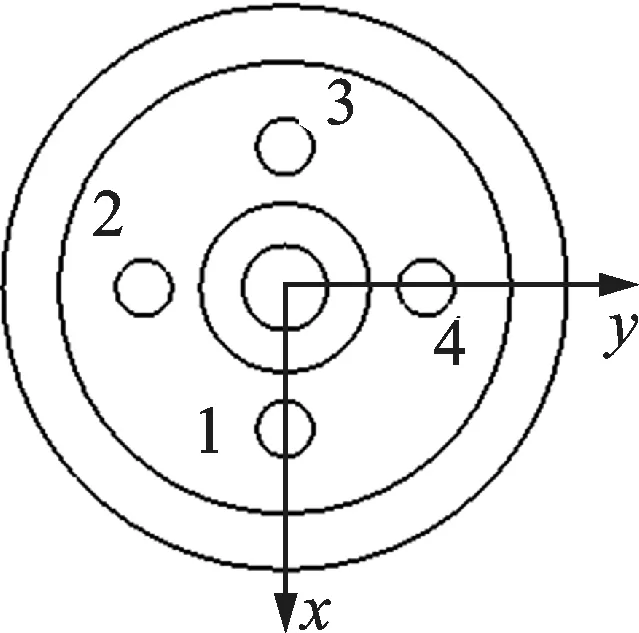
圖12 機構俯視圖坐標系Fig.12 Mechanism top view coordinate system
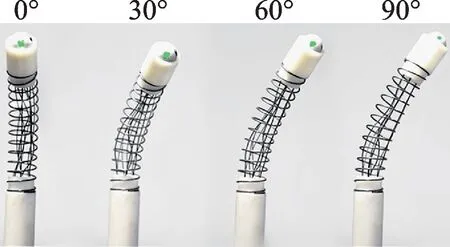
圖13 鏡頭空間彎曲形態Fig.13 Lens space bending shape
設計的自主彎曲機構能夠根據需求向不同角度彎曲,具備一定的實用性。
4 結束語
筆者設計了一種由形狀記憶合金絲驅動的自主彎曲機構,該機構由SMA絲驅動球軸承和彎曲彈簧使機構彎曲。機構末端搭載的鏡頭在增大探測視角的同時,可以有效避免與發動機內部結構的碰撞,從而減少鏡頭磨損。搭建了測試平臺測試了SMA絲的驅動收縮特性,獲得了SMA絲的驅動特性。建立了彎曲機構的運動學模型,計算出了機構的可達空間,并對機構末端搭載的光學鏡頭軌跡進行了試驗測試,驗證了理論分析的有效性,證明了筆者設計的自主彎曲機構的實用性。本研究對自主彎曲機構的設計進行了初步的研究,未來可以用柔性材料制成的鏤空管替代彎曲彈簧,可以更好保護機構內部的形狀記憶合金絲,同時也能減小因孔探儀上端部件自重引起的軸向方向的變形;在孔探儀下端部件中添加SMA旋轉板簧可以實現機構沿軸向方向的自動旋轉;目前設計的孔探儀機構是單個的彎曲彈簧,未來可以將多個彎曲彈簧單元串聯以提升孔探儀的可達空間。
