基于單點脈沖寬度法的轉子軸向位移徑向測量?
2021-04-28 16:24:20袁倩倩朱永生曹鵬輝陳凱達顧金芳
振動、測試與診斷 2021年2期
關鍵詞:測量
袁倩倩,朱永生,閆 柯,曹鵬輝,陳凱達,顧金芳
(1.西安交通大學現代設計與轉子軸承系統教育部重點實驗室 西安,710049)(2.上海天安軸承有限公司 上海,200125)
引言
轉子系統作為旋轉機械的核心支撐結構,其軸向位移在線監測技術是評估重大裝備服役狀態、預警故障的重要基礎技術之一[1]。例如航空發動機、汽輪機等重大裝備領域,大型轉子系統的軸向竄動、軸向脹差等會引發轉/靜件軸向接觸與摩擦,是影響轉子運行性能、誘發故障的主要因素[2]。高精機床等智能制造領域,電磁軸承-轉子系統中磁力軸承需要準確的軸向位移反饋控制轉子運動,否則會導致轉子不穩定,嚴重時會出現電磁軸承-轉子系統故障[3-5]。在智能滾動軸承轉子系統的在線服役調控技術中,轉子軸承系統的軸向位移用于反映軸承內部載荷及預緊狀態,并用于轉子系統剛度調控、壽命評估和狀態控制[6]。為了及時準確地發現轉子系統運行狀態,對轉子軸承位移進行在線測量變得十分重要。然而,隨著機械產品技術的不斷發展,轉子系統集成度不斷提高,軸向位移傳感器的安裝位置和安裝空間受到嚴重限制。
近年來,轉子軸向位移的徑向測量方法成為國內外學者的研究熱點,但均需要對轉子結構進行較大的改動。文獻[7-8]通過在待測轉子上加工臺階面,利用電渦流效應,提出了利用徑向布置電渦流傳感器測量磁懸浮軸承軸向位移的方法,分析了電渦流傳感器與臺階安裝間隙、臺階高度等對測量結果的影響。王曉光等[9]通過在待測轉子回轉表面加工錐面,當存在軸向位移時,利用錐面與傳感器徑向距離變化實現對軸向位移的徑向測量。上述方法除了對轉子結構有較大改動外,對多個傳感器的靈敏度一致性、傳感器相對位置與精度、傳感器抗電磁干擾等提出了較高的要求,因此工程應用受到一定限制。文獻等[10-12]在轉子上增加磁性編碼盤,然后利用兩路霍爾傳感器檢測磁性編碼盤,通過兩路傳感器輸出信號的時間延遲計算得到轉子軸向位移。該方法要求在轉子設計中預留編碼盤裝配位置,因此在一定程度上影響了轉子結構,同時編碼盤安裝困難,兩路傳感器需要更大的安裝空間及安裝平行度調試時間。
在轉子軸向位移的徑向測量中,為了盡可能不影響轉子結構及安裝空間,時振剛等[13]利用電感原理,在轉子和定子徑向布置電感線圈,通過轉子軸向位移變化引起的線圈電感變化計算得到轉子軸向位移。Zong等[14]利用電磁互感原理,研制了一種新型線性差動位移測量傳感器,通過軸向位移引起E型電感線圈與纏繞在轉子上的電感線圈之間感應電動勢變化實現軸向位移測量。可以看出,上述方法均存在傳感器結構復雜、安裝調試較為困難等問題。
在不改變轉子系統結構的前提下,為了盡可能簡化傳感器安裝與測試,筆者提出基于單個位移傳感器、單點脈沖寬度響應的轉子軸向位移徑向測量原理與實現方法:在轉子表面粘貼打印條碼,利用單個激光光纖傳感器開展轉子軸向位移的徑向測量。測量原理簡單,傳感器安裝及調試方便,為轉子軸向位移測量提供了一種新思路。
1 脈沖寬度法位移測量建模
脈沖寬度法位移測量使用的基本條碼形狀為等腰三角形打印條碼,如圖1所示。圖中:α為等腰三角形條碼的底角;w為等腰三角形的底邊長;nw為測量區的總長度。

圖1 測量條碼Fig.1 Measuring bar code
測量條碼主要包括兩部分:測量區和兩邊的接口區。測量區由n個等腰三角形依次排列組成,“白色”表明其具有與背景不同的材料特性。為了便于加工、粘貼及周期識別,測量區兩邊設置接口區。為了保證條碼完整包裹轉子表面,接口區和測量區長度之和略大于轉子周長。
這里采用具有顏色識別功能的激光光纖色標傳感器進行三角形條碼邊緣識別。激光光纖色標傳感器通過監測條碼顏色輸出信號,當檢測到白色條碼時輸出高電平信號,否則輸出低電平信號。厚度為h的條碼粘貼在待測轉子上,位移傳感器置于轉子徑向,中心線垂直于轉子的中心線,如圖2所示。
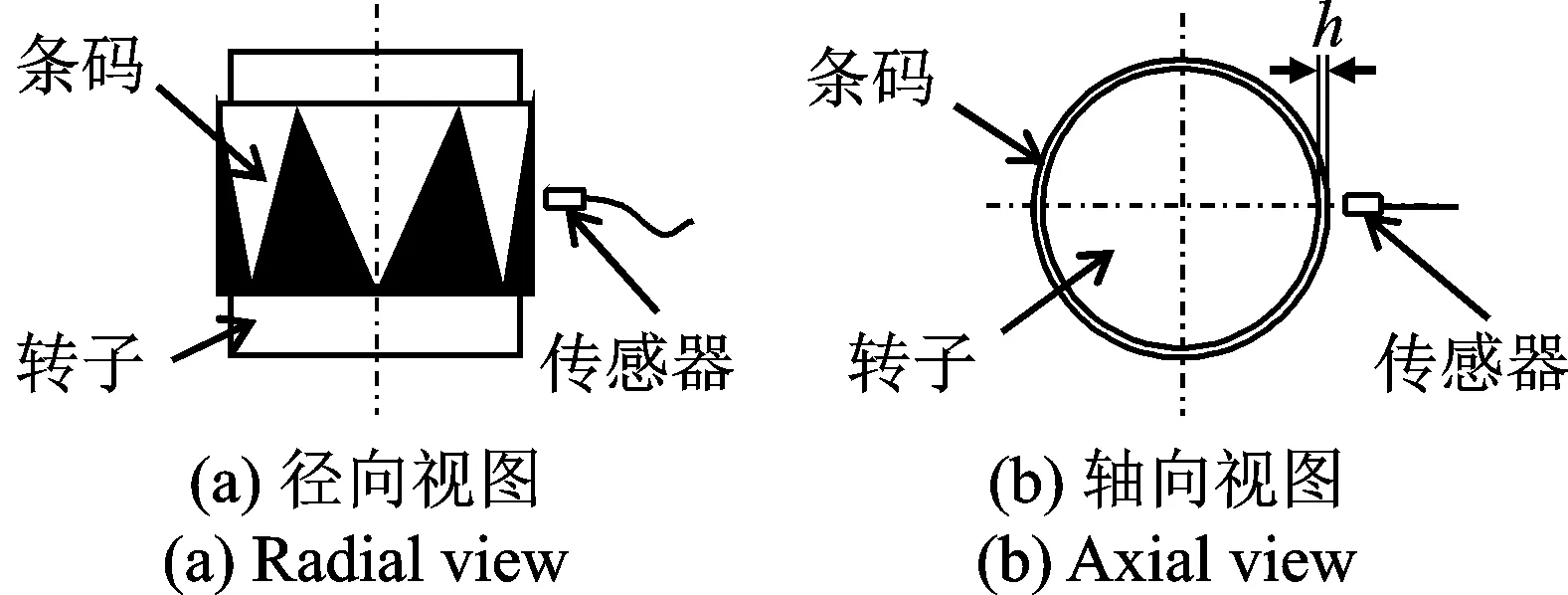
圖2 傳感器布局示意圖Fig.2 Schematic diagram of sensor layout
轉子工作時,激光光纖型色標傳感器輸出信號為脈沖信號。轉子軸向位移前后傳感器輸出信號如圖3所示。由圖中可以看出:z0為轉子軸向位移基準距離;TR為轉子旋轉一圈的周期;當轉子軸向位移變化Δz時,傳感器兩次掃描軌跡發生變化,新軌跡與原軌跡軸向距離差即轉子軸向位移量。測量區信號具有一定的局部周期性,轉子軸向位移前,t為一個局部周期T內高電平持續時間;軸向位移后,t'為一個局部周期T'內高電平持續時間;轉子位移前后局部周期是由條碼尺寸確定的,當條碼尺寸不變時轉子位移前后條碼局部周期不變,即T=T'。

圖3 轉子軸向位移前后傳感器輸出信號示意圖Fig.3 Schematic diagram of sensor output signals before and after axial displacement
由條碼中幾何關系可得,信號高電平持續時間與局部周期滿足

由式(1)和式(2)計算得到轉子軸向位移為

式(3)表明,轉子軸向位移可通過傳感器輸出信號和條碼尺寸參數計算得到。由式(3)可以看出,轉子軸向位移受條碼寬度、條碼傾角等參數影響,因此需要建立測量模型,探究其對測量結果的影響規律。
2 脈沖寬度法位移測量精度分析
2.1 測量條碼建模
對測量條碼進行分析時,首先要建立坐標系。所建坐標系O0x0y0z0如圖4所示,圖中:L1為第1個白色條碼的左側邊緣;L1'為第1個白色條碼的右側邊緣;L2為第2個白色條碼的左側邊緣;L2'為第2個白色條碼的右側邊緣;Ln為第n個白色條碼的左側邊緣;Ln'為第n個白色條碼的右側邊緣;2πR為所貼條碼轉子周長。

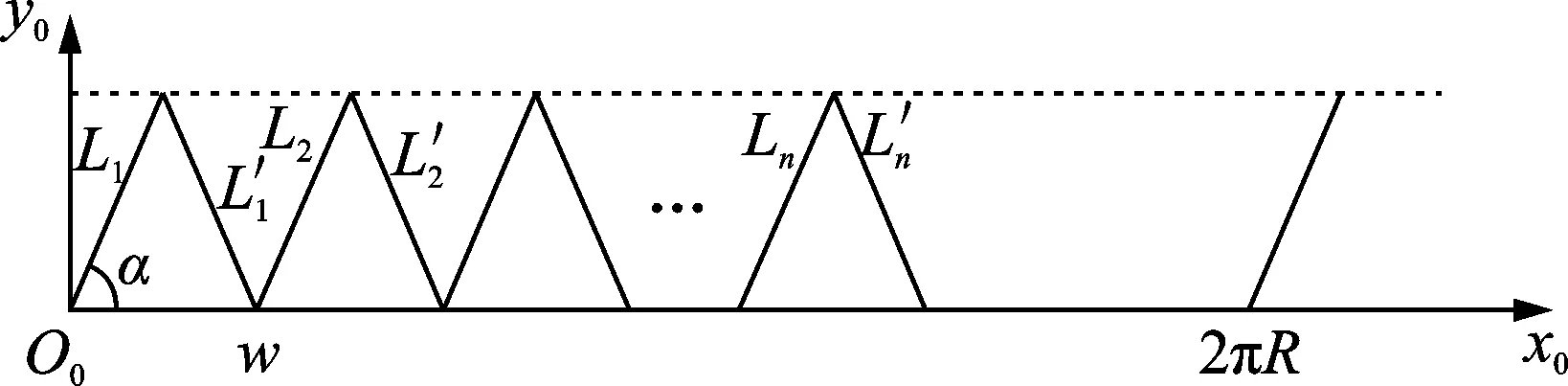
圖4 測量條碼模型Fig.4 Measuring bar code model

由幾何關系可得測量區內,等腰三角形條碼邊緣方程式可表達為其中:i為條碼測量區內條碼邊緣序號(1≤i≤n且i∈R);Li為第i個白色條碼的左側邊緣;Li'為第i個白色條碼的右側邊緣。
條碼在制作過程中,其邊緣受到打印設備、送紙誤差等因素影響而非一條直線,這里認為邊緣誤差服從正態分布,其均值為零,幅值為δ,則實際的邊緣可修正為
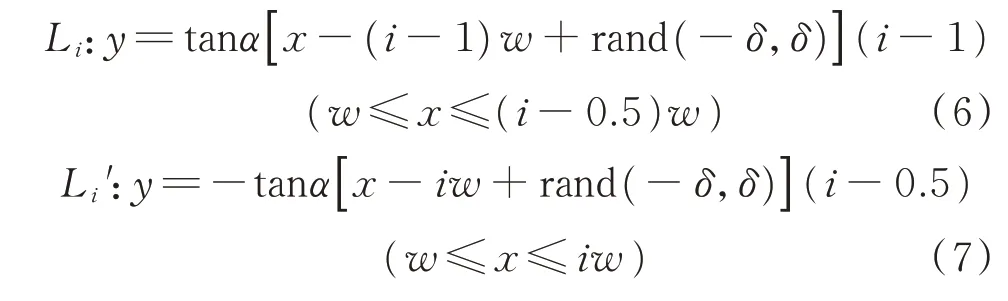
其中:rand(-δ,δ)為區間[-δ,δ]內的隨機值。
2.2 待測轉子運動模型建立
實際工作過程中,轉子運動質心軌跡不是一個點,其受轉子傾角、偏心距等裝配誤差及軸向振動、轉動角速度等運動參數影響。在研究轉子運動分析時先建立坐標系,轉子與基座坐標系如圖5所示。圖中:O1x1y1z1為轉子坐標系;O2x2y2z2為基座坐標系;γ為轉子傾斜角;e為轉子中心與基座中心偏心距。為了簡化計算,這里忽略轉子形狀誤差,將轉子看為理想圓柱體,傾斜角、偏心距、轉動角速度等運動參數對轉子運動的影響采用單獨作用結果疊加的方式進行分析。

圖5 轉子與基座坐標系Fig.5 Rotor and base coordinate system
記e=(ax,ay,az)T,轉 動 角 速 度ω相 當 于轉 子坐標系O1x1y1z1繞z2軸旋轉,軸向振動b和軸向位移z對轉子的作用相當于轉子坐標系O1x1y1z1沿著z2軸方向平移,作用前后轉子上各點的坐標滿足

其中:t1為主軸轉過的時間;(x1,y1,z1)為轉子運動前各點坐標;(ξ,ψ,ζ)為中間變量;(x2,y2,z2)為轉子運動后各點坐標。
2.3 測量誤差影響因素分析
將所建數學模型采用Matlab編程實現,其主要求解思路如下:①輸入條碼尺寸參數、轉子安裝尺寸參數、運轉參數等工況參數;②根據條碼顏色得到傳感器初始輸出信號;③根據條碼尺寸求解下一采樣時刻轉子位置;④求解此時傳感器輸出,保存輸出結果,然后循環執行步驟3和4直到預定測量時間。
以某型號轉子為例進行分析,參數如表1所示,以表1中各參數值為例,分析條碼結構參數、轉子工況參數對測量精度的影響,這里采用仿真模型計算的軸向位移與設定位移之間誤差作為測量精度的評價標準。
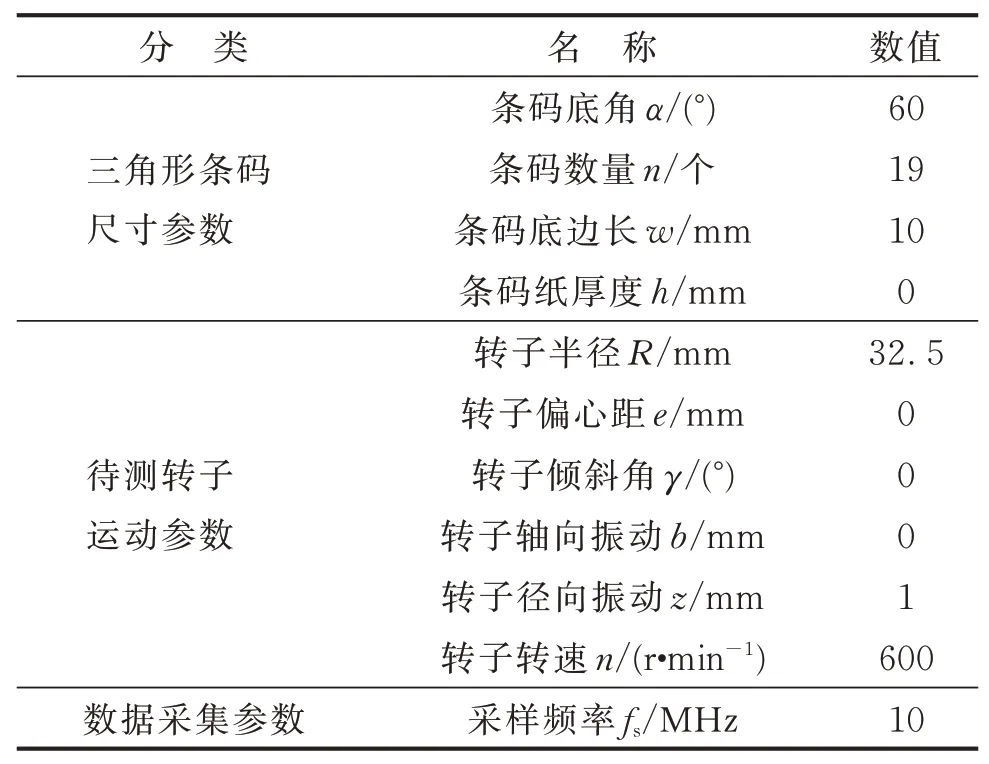
表1 數學模型參數Tab.1 Parameters of mathematical model
2.3.1 轉子偏心距
分析轉子偏心距對轉子軸向位移測量誤差的影響時,以表1中所示的各參數為固定參數,改變偏心距的數值,可以得到不同偏心距時的位移計算結果隨時間的變化曲線,進而得到轉子偏心距與位移計算誤差關系曲線,如圖6所示。由圖中可以看出,偏心距使位移計算結果產生類似正弦規律的周期波動,其轉動周期與轉子轉動周期相同,隨著偏心距增大,軸向位移誤差增大,偏心距為10μm時,其誤差為5μm左右。由于轉子制造誤差轉子偏心距無法消除,轉子偏心距影響轉子位移測試結果,因此在后續的信號處理中要考慮誤差消除問題。
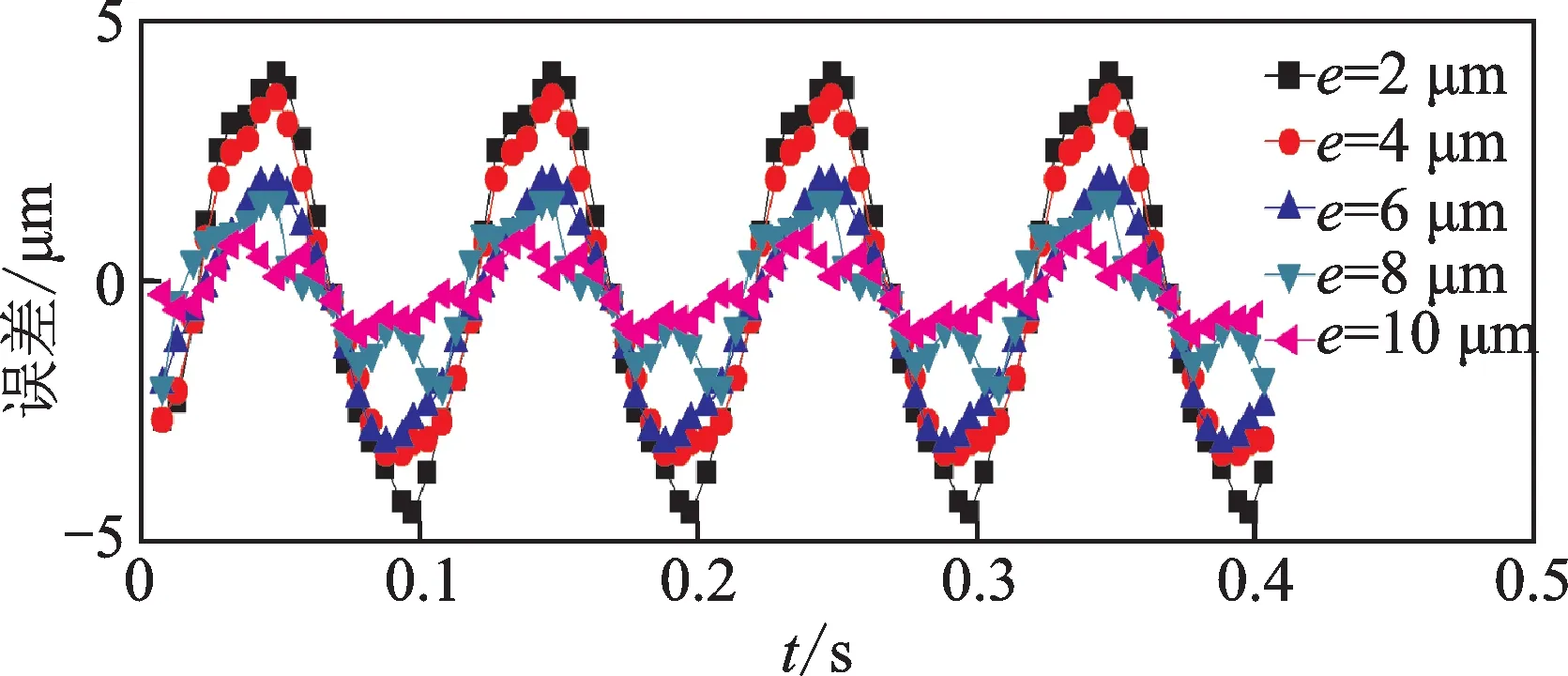
圖6 偏心距與位移計算誤差關系Fig.6 Relationship between eccentricity and displacement calculation error
2.3.2 條碼數量
測量條碼數量受待測轉子直徑影響,轉子直徑確定,條碼數量影響條碼寬度,由測試條碼幾何關系可知條碼數量越多條碼寬度越小。根據脈沖寬度法位移測量原理,轉子轉過一個局部周期,傳感器輸出一次軸向位移。條碼數量增加軸向位移響應速度增加。當條碼測量區寬度不變,條碼數量對轉子軸向位移計算結果影響如圖7所示。由圖7(a)可知,不同條碼數量時,位移測量誤差的波動范圍基本相同,維持在2μm之內;由圖7(b)可知,隨著條碼數量增大,響應時間降低。利用脈沖寬度法進行位移測量時,條碼數量幾乎不會影響測試精度,但增大條碼數量可提高響應速度,實驗條件允許時盡量使用條碼數量較多的條碼。

圖7 條碼數量對計算結果的影響Fig.7 The effect of the number of bar codes on the calculation results
2.3.3 條碼傾角β
由式(3)可知,相同軸向位移下,條碼傾斜角度影響傳感器輸出信號的脈沖寬度,傾角對測試結果的影響如圖8所示。由圖中可以看出,隨著條碼傾斜角度增大測試誤差增大,測量準確度降低,這是由于相同采樣頻率下,隨著條碼傾斜角度增大,條碼邊緣越陡峭,邊緣檢測誤差越大。相同的測量區長度,條碼傾斜角度越小,條碼寬度越小,條碼制作困難不易粘貼。因此在位移測量中,為提高測量精度,現有制作條件下,盡可能減小條碼傾斜角度。

圖8 傾斜角度對位移計算誤差影響Fig.8 Effect of tilt angle on displacement calculation error
2.3.4 轉子直徑
為了驗證脈沖寬度法測量轉子軸向位移適用于不同直徑轉子,這里分析了不同轉子直徑下測量誤差的影響。待測轉子不同在于其直徑的變化。若其他相關尺寸不變,轉子直徑增加時,根據測量條碼與待測轉子的比例關系可以分為兩種情形進行討論。
1)條碼的形狀變化比例與直徑變化比例相同
此種情形下,轉子直徑發生變化的同時,條碼的寬度發生了相應比例的變化,利用測量模型計算的結果如圖9所示。由圖9(a)可知,測量誤差隨著軸徑的增大基本不變,其波動范圍在0.4μm以內;由圖9(b)可知,響應時間與軸徑無關,即大尺寸轉子與小尺寸轉子的測量效果基本相同。

圖9 第1種情形下軸徑對計算結果的影響Fig.9 Effect of shaft diameter on measurement error in the first case
2)條碼的形狀變化比例與直徑變化比例不同
條碼的寬度、傾斜角度不變,根據轉子直徑變化而改變條碼的長度。此情形下,條碼測量區條碼的尺寸參數不發生變化,只是條碼的數量有所不同,這會引起位移計算結果的響應速度發生變化,如圖10所示。由圖10(a)看出,計算誤差都隨著轉子直徑的增大而增大。由圖10(b)看出,響應時間隨著轉子直徑的增大而減小。在進行小直徑轉子位移測量時,由于測量誤差較小響應速度較慢需要考慮提高其響應速度。在進行大直徑轉子位移測量時,由于測量誤差較大響應速度較快需要考慮消除測量誤差。

圖10 第2種情形下軸徑對計算結果的影響Fig.10 Effect of shaft diameter on measurement error in the second case
3 實驗測試
3.1 實驗裝置
測試實驗時,文中轉子采用電主軸驅動,空氣軸支承。激光打印的高精度條碼粘貼在轉子表面,高精度激光位移傳感器及激光光纖傳感器固定傳感器支架上,如圖11所示。其中激光位移傳感器及激光光纖傳感器的測量精度為±0.5μm。
測量時,由于高精度氣浮軸(2 000 r/min下徑向 跳動 誤 差0.2μm[15])在 加 載 時軸 向 位 移不易 控制,為了保證輸入準確的軸向位移,轉子相對于傳感器的軸向位移,采用移動傳感器的方法來實現,如圖11所示。通過手輪調節微位移平臺移動,使得傳感器相對轉子產生軸向位移。安裝在傳感器支架上端的高精度激光位移傳感器,得到轉子實際軸向位移。安裝在支架下端的激光光纖傳感器將測得的光信號轉化為電壓信號,然后經調理電路得到兩路時域脈沖信號,根據兩次傳感器測量信號的脈沖寬度持續時間計算轉子軸向位移。通過計算得到的軸向位移與激光位移傳感器直接測量得到軸向位移的差值即為測試誤差。
3.2 實驗結果分析
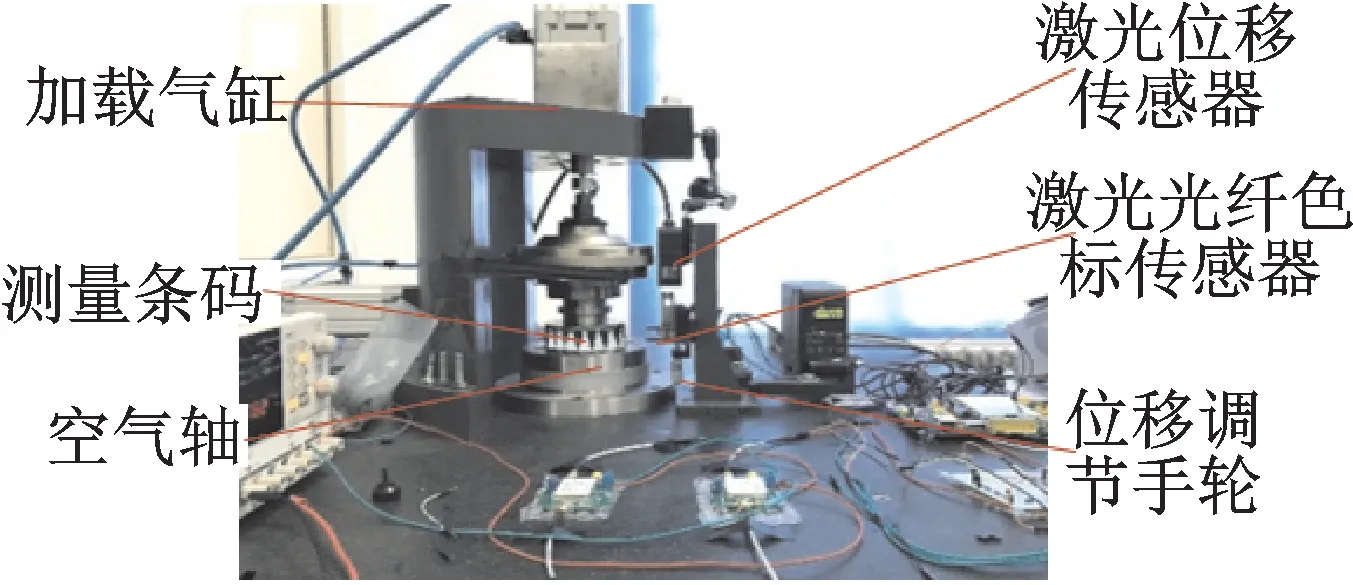
圖11 位移測量實驗臺Fig.11 Displacement measurement bench
圖12 所示為不同轉速下條碼傾角β對測量誤差影響。從圖中看出,隨著傾角增大,誤差增大;轉子轉速影響誤差增大的速度,轉速越大誤差增大的速度越大;當轉子轉速為200 r/min時,測量條碼傾斜角度對測量誤差影響很小,差值為0.78μm。轉速為1 000 r/min時,同樣傾角變化,誤差變化為5.34μm;轉速為1 500 r/min時,同樣傾角變化,誤差變化為6.65μm。同時,同一傾角下,轉速越大誤差越大。測量誤差受測量條碼傾角及轉子轉速聯合影響。

圖12 不同轉速下條碼傾角與測量誤差的關系Fig.12 Relationship between bar code inclination and measurement error at different speeds
當條碼傾角為45°,條碼寬度變化會引起條碼數量的改變。如圖13所示不同轉速下條碼寬度對誤差的影響規律,由圖中可以看出,同一轉速下條碼寬度對誤差影響較小。

圖13 不同轉速下條碼寬度與測量誤差的關系Fig.13 Relationship between bar code width and measurement error at different speeds
綜上所述,本方法在保證測量范圍的前提下,由于條碼寬度對測量誤差的影響不大,在轉子直徑和測量區長度確定的情況下,可以通過減小傾斜角度來提高轉子位移的測量誤差。
4 結論
1)針對轉子軸向位移徑向測量中存在轉子結構改變、傳感器安裝調試復雜等問題,提出了一種結合打印條碼和光學色標傳感器的軸向位移徑向測量方法,結合理論模型及實驗驗證了該方法的有效性,為轉子軸向位移的徑向測量提供了新思路。
2)通過建立模型探討了條碼幾何參數及轉子工況條件等對測試結果的影響規律,條碼數量增大轉子位移誤差基本不變響應速度增加;條碼傾斜角度越大轉子軸向位移的誤差越大;條碼參數隨著轉子直徑同比例增大時,轉子軸向位移誤差波動范圍為0.4μm,響應速度基本不變;條碼數量增多其他參數不變時,轉子直徑增大時,轉子軸向誤差增大,響應時間降低。
3)理論和精密氣浮軸系實驗測試表明:低速下轉子軸向位移測量誤差較低,能夠滿足工程測量精度。后續研究將進一步提升對條碼邊緣檢測精度,提高在高速情況下的測試精度。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
