北斗三號衛星多頻多通道差分碼偏差估計與分析
2021-04-28 00:37:36鄧遠帆張小紅劉萬科
測繪學報 2021年4期
鄧遠帆,郭 斐,張小紅,劉萬科
武漢大學測繪學院, 湖北 武漢 430079
GNSS導航信號差分碼偏差(differential code bias,DCB)是指由于硬件延遲導致同一時刻不同頻率或同一頻率上不同測碼信號之間的時延差異,包括衛星端差分碼偏差和接收機端差分碼偏差[1]。差分碼偏差是影響電離層總電子含量(total electron content,TEC)監測和建模的主要誤差源[2-4],忽略衛星和接收機DCB會導致TEC計算誤差達到數十個納秒[4-5]。差分碼偏差也直接影響利用偽距進行導航定位與授時的精度,其誤差可達數米[6-8]。因此,在電離層延遲估計與建模、導航定位與授時等應用中必須準確分離衛星和接收機DCB。自1998年以來,國際GNSS服務組織(International GNSS Service,IGS)啟動了電離層工作組,將GPS衛星DCB作為其電離層模型的副產品。從2003年起,IGS分析中心開始提供GLONASS衛星的DCB[9]。文獻[10—12]基于GPS觀測數據對GPS衛星和接收機的DCB參數進行了一系列的研究,解算結果與IGS發布的結果差異為亞納秒級。近年來,隨著我國北斗衛星導航系統的發展,文獻[3]提出采用“兩步法”,利用區域電離層模型通過較少的跟蹤站即可精確估計北斗二號衛星的DCB。在此基礎上,文獻[13]在MGEX框架(multi-GNSS experiment,MGEX)下實現了多模GNSS的差分碼偏差估計,取得了與歐洲定軌中心(Centre for Orbit Determination in Europe,CODE)、德國宇航中心(Deutsches Zentrum für Luft- und Raumfahrt,DLR)等機構相當的精度。
2020年6月23日,隨著最后一顆北斗三號組網衛星成功送入預定軌道,北斗三號全球導航衛星系統星座部署全面完成。相較于北斗二號衛星,北斗三號衛星提供的頻率資源和調制方式更加豐富。它不僅繼承了北斗二號衛星的頻率,還增加了兩個互操作頻點B1C和B2a,且同一頻率具有多個支路,其頻點與偽距通道信息見表1[14-19]。北斗三號更多的可用衛星和更加豐富的頻率資源為導航定位帶來了新的發展機遇。與此同時,多頻率多通道信號也衍生出一系列新的偏差亟需解決,而差分碼偏差就是其中之一。早在北斗三號系統建設之初,已有學者對北斗三號衛星的DCB估計方法及其特性進行了研究[2,15,20-21]。但受限于當時可用的北斗三號衛星數量較少,且地面接收設備觀測值類型的限制,絕大多數研究只聚焦于B1I、B2I和B3I 3個頻點的少數幾類DCB。截至目前,全球可持續穩定提供DCB產品的機構中國科學院(Chinese Academy of Science,CAS)和DLR分別只提供8種、6種北斗衛星DCB,具體的DCB類型見表2。盡管通過線性組合方式可重構計算部分其他類型的DCB,但仍無法涵蓋所有類型的DCB。當前,隨著北斗三號系統的全面組網和地面接收機的更新和升級,使得北斗三號多頻多通道的DCB研究成為可能。因此,本文針對北斗三號多頻多通道的差分碼偏差估計研究,對于提升北斗導航定位與授時服務性能具有重要的現實意義。

表1 BDS衛星信號頻率與偽距類型[14-19]
1 差分碼偏差估計方法
1.1 DCB估計數學模型
忽略偽距觀測噪聲和多路徑誤差,任意兩種類型的碼觀測值的觀測方程可以表示為[15]
(1)


(2)

通常認為一天內的DCB為常數,將式(2)中無幾何組合觀測量在一天內取平均,削弱觀測噪聲和多路徑誤差,得到綜合的DCB觀測值
(3)

由于衛星端和接收機端DCB參數線性相關,所形成的法方程秩虧。通常將該類型所有衛星端DCB之和約束為0,即添加“零基準”約束,其約束方程可以表示為
(4)
式中,Ns為該類型DCB所包含的衛星總數。約束方程的不同會導致DCB估計結果的不同,而不同機構采用的約束方程可能不一致,同一機構不同時間受觀測衛星數量變化影響其基準也會產生變化。因此,不同機構或不同時間之間的DCB要進行基準統一才能進行比較[23-26]。
1.2 DCB估值基準統一
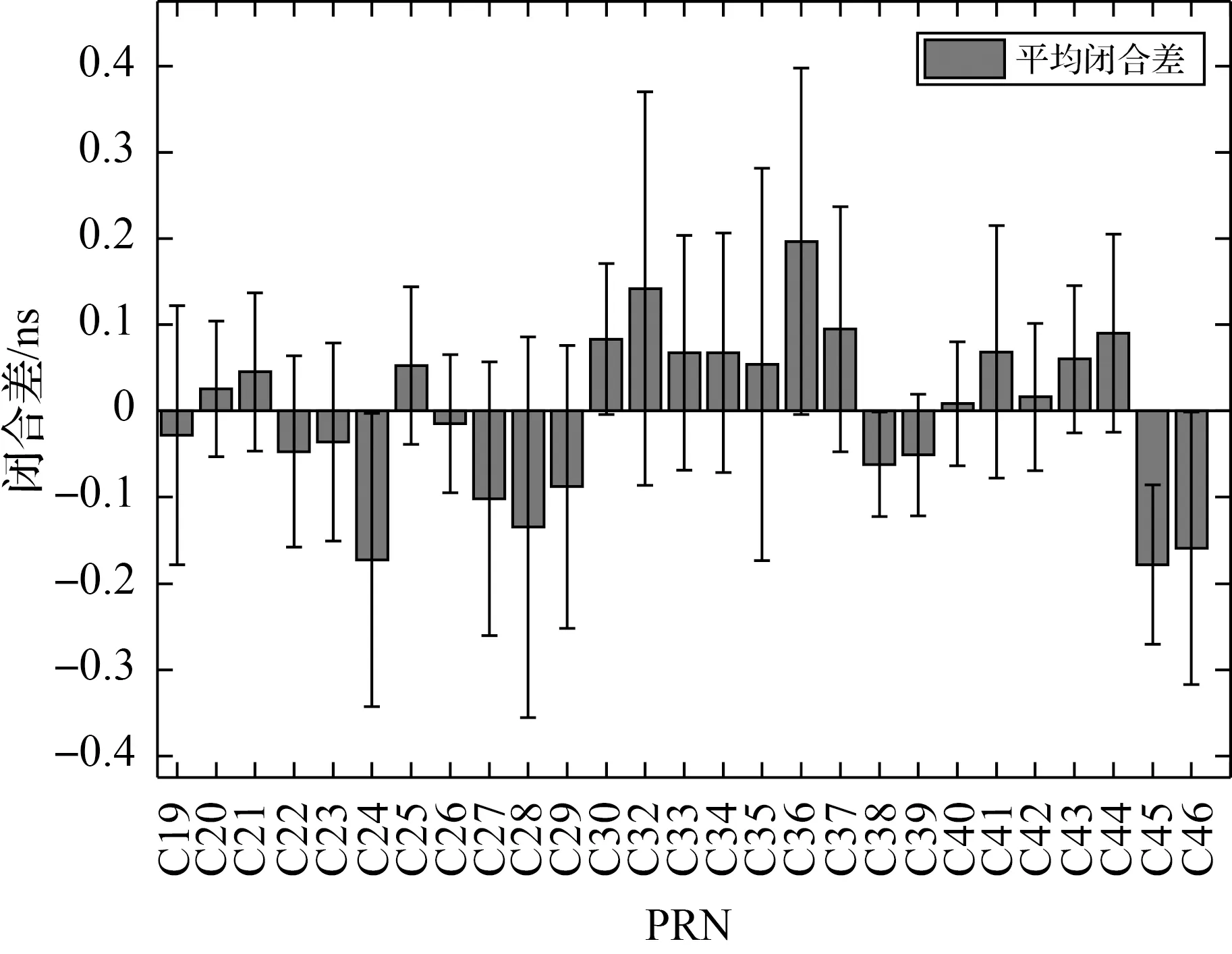
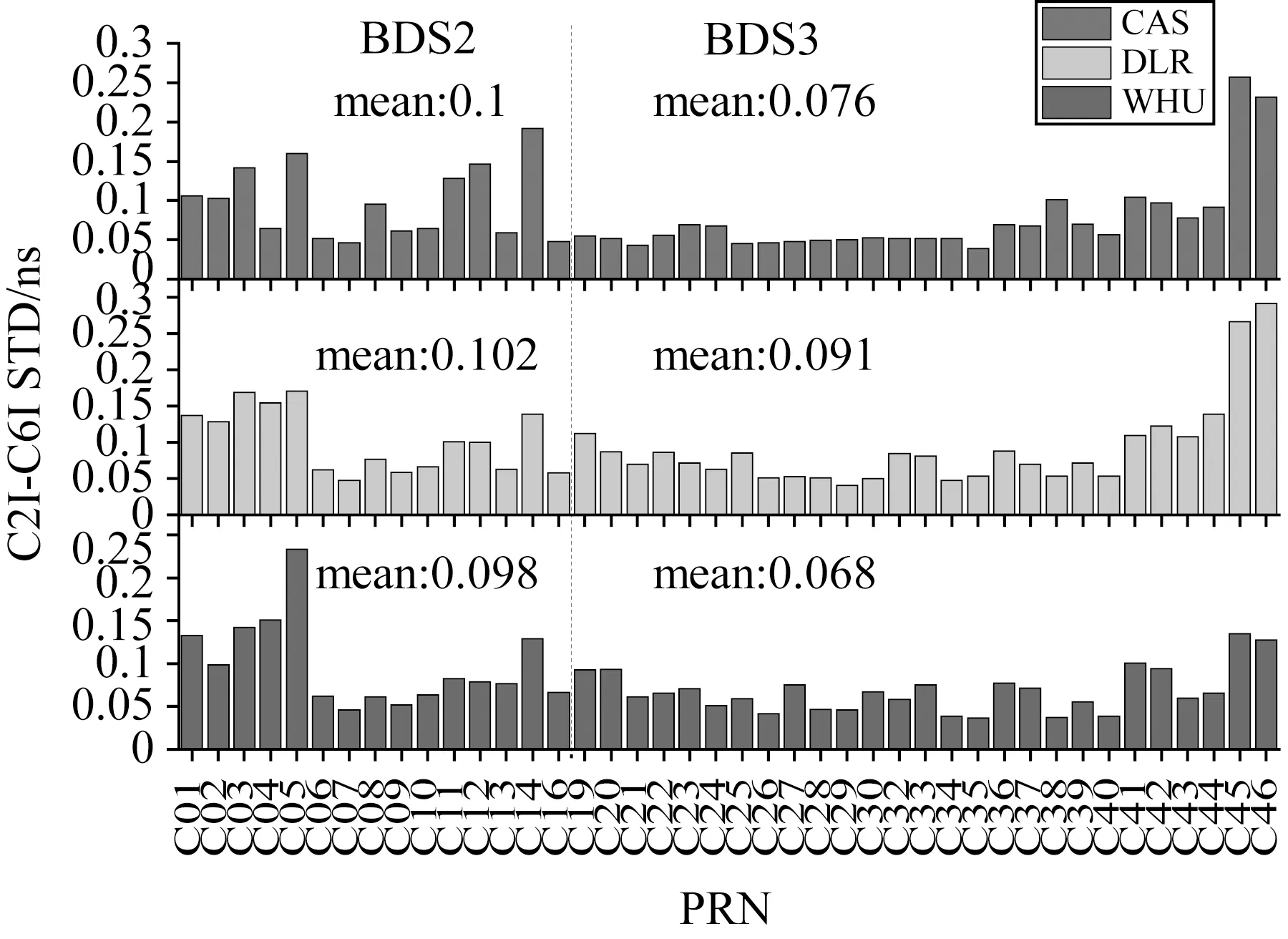
假設A基準有m顆衛星,B基準有A的m顆衛星中的n顆衛星(n (5) (6) (7) 式中,I為m階單位矩陣。如果n>m,則采用相同的方式,把B基準下的DCB參數調整到A基準下。如果要分析一段時間跨度內DCB的穩定性,由于會存在某些天某些衛星值缺失的情況,選取所有天都有效的衛星施加零基準約束,再將每天的基準統一到此零基準,只有這樣,才能對一段時間內的DCB進行穩定性分析。 當前,大部分支持北斗的測站均能接收到C2I、C6I、C7I這3種碼觀測值,三者之間的DCB容易估計。為了確保其余各類DCB的可估性,首先需要搜集盡可能多的北斗多頻多通道碼觀測值。其次,為了客觀評價本文DCB估值與參考值之間的一致性和穩定性,還需要選取與DLR、CAS盡可能相同的測站數及分布。表3為利用2020年4月1日至2020年4月30日(對應DOY 92—DOY 121)一個月內所有IGS站網數據,統計得到的可估DCB類型及可用測站數。將這些測站取并集,綜合考慮測站的空間分布與觀測質量,得到本文試驗所用的58個測站,如圖1所示,圖中不同顏色代表不同類型的接收機,這與DLR和CAS所選的測站基本一致。 圖1 測站分布Fig.1 Distribution of stations 本文使用CODE發布的GIM產品改正電離層延遲。CODE采用基于球諧函數的全球電離層TEC建模方法計算GIM,其內符合精度約為2.4TECU[27-28]。 表3 北斗三號衛星可估的DCB類型及可用測站數(不含C2I-C7I、C2I-C6I、C6I-C7I) 圖2給出了DCB估計的數據處理流程。其中,質量控制部分主要包括設置衛星截止高度角為20°、剔除波動大(標準差大于1)和觀測數量少(時長小于50 min)的GF組合時間序列;最小二乘中單位權中誤差σ0=0.1,依據標準差給綜合DCB觀測值定權。 由表3可知,可估的北斗三號DCB類型共有19種,各類碼組合的可用測站數為17~34個。為了與北斗二號進行比較,同時還估計了C2I-C6I、C2I-C7I、C6I-C7I這3種DCB類型,總共估計得到了22種類型的DCB。其中C2I-C7I、C6I-C7I類型的DCB只存在于北斗二號衛星,C2I-C6I類型的DCB同時存在于北斗二號和北斗三號衛星,其余類型的DCB則只存在于北斗三號衛星。 為了評估北斗三號多頻多通道DCB估計的精度和可靠性,從內符合精度、外符合精度、估值穩定性等方面進行分析。需要注意的是,在比較分析之前需要采用1.2節中的方法消除由不同機構的基準差異、同一機構不同時間衛星數量變化引起的基準不一致。 圖2 DCB估計Fig.2 DCB estimation 閉合差是反映內符合精度的重要指標,給定任意3個碼觀測值,可構造3個DCB,但是,理論上只有兩個獨立的DCB,即3個DCB之間的閉合差為零[29-30]。由于各類DCB是基于不同觀測值獨立解算的,且平差計算時受觀測噪聲和模型誤差影響,導致其閉合差通常并不等于零。閉合差的大小反映了DCB估值與模型的吻合程度,閉合差越小,內符合精度越高。以北斗三號衛星3個新頻點之間形成的3類DCB(C1X-C5X、C1X-C8X、C5X-C8X)為例,圖3給出了北斗三號各衛星的每日的DCB閉合差(DCBC1X-C5X+DCBC5X-C8X+DCBC8X-C1X)時間序列。由圖3可知,各衛星每日的DCB閉合差在零值附近波動,無顯著系統性偏差,且絕大多數閉合差分布在0.3 ns以內。少數衛星如C28、C32、C35衛星分別在DOY 113、DOY 120、DOY 97的閉合差達到1 ns,這可能與當天可用的觀測數量和數據質量有關。統計北斗三號各衛星DCB月平均閉合差及其標準差,如圖4所示。從圖4中可以看出,北斗三號衛星DCB估值的內符合精度較好,平均閉合差都在0.2 ns以內,且大部分優于0.1 ns,其中C40衛星平均閉合差最小為0.008 ns,C36衛星的平均閉合差最大為0.2 ns。各衛星閉合差的標準差都在0.4 ns以內,且大部分優于0.2 ns,這表明C1X-C5X、C1X-C8X、C5X-C8X 3個DCB估值之間具有較好的一致性,內部符合精度較高。其他類型的DCB閉合差具有類似的統計特性,限于篇幅,不單獨羅列。 圖3 北斗三號各衛星DCB日閉合差時間序列(C1X-C5X、C1X-C8X、C5X-C8X)Fig.3 Time series of BDS-3 satellite DCB daily closure errors (C1X-C5X、C1X-C8X、C5X-C8X) 圖4 北斗三號各衛星DCB月平均閉合差及標準差(C1X-C5X、C1X-C8X、C5X-C8X)Fig.4 Monthly mean closure errors and STDs of BDS-3 satellite DCBs (C1X-C5X、C1X-C8X、C5X-C8X) 為了驗證北斗三號衛星DCB估計結果的外符合精度,將本文的估計結果(下文簡稱為WHU)與CAS和DLR機構的DCB產品進行比較。除C2I-C6I之外,CAS和DLR的DCB產品中分別有6種、4種北斗三號衛星DCB類型,將其依次與WHU求差,得到北斗三號各衛星DCB估值的外符合精度,如圖5、圖6所示。從圖5中可以看出WHU和CAS的平均偏差基本都在0.1 ns以內,這說明WHU與CAS的DCB產品之間一致性較好。其中C25衛星C1X-C8X類型DCB平均偏差較大,達到0.3 ns,這與C1X-C8X類型DCB的數據質量有關,見表3,用于估計C1X-C8X類DCB的測站數量僅為17,明顯少于其他DCB類型。從圖6中可以看出,除C45衛星之外,WHU與DLR之間DCB的平均偏差基本在0.2 ns以內,說明二者之間也具有較好的一致性。至于C45衛星,DLR和WHU之間C1X-C2I、C2I-C5X兩種類型的DCB差值分別為-0.88、1.15 ns。這與該衛星的數據、質量和這兩類DCB的穩定性有關,分析DLR和WHU的DCB估值方差-協方差矩陣發現,所有衛星C1X-C2I的月平均標準差分別為0.054、0.051 ns,而C45衛星的標準差分別為0.308、0.155 ns;類似的,C45衛星C2I-C5X的月平均標準差分別為0.135、0.213 ns,顯著大于其他衛星。 圖5 WHU與CAS估計的6種北斗三號衛星DCB之間的平均偏差Fig.5 The 6 types of BDS-3 satellite DCB mean differences of WHU and CAS 圖6 WHU與DLR估計的4種北斗三號衛星DCB之間的平均偏差Fig.6 The 4 types of BDS-3 satellite DCB mean differencesbetween WHU and DLR 盡管CAS和DLR只提供少數幾種DCB產品類型,但是根據DCB之間的線性關系,可利用已有的DCB類型經過轉換得到一些新的DCB類型,比如DCBC1X-C8X=DCBC1X-C5X+DCBC5X-C8X。因此,還可將WHU的DCB估值與CAS和DLR的部分DCB轉換值進行間接比較,如圖7、圖8所示。從圖7和圖8中可以看出,相比于圖4和圖5中DCB估值的直接比較法,由于受誤差傳播的影響,間接法獲得的各機構之間的DCB差值明顯更大,一致性較差,其差值分布在1 ns之內,這也說明了直接估計多頻多通道DCB的必要性。 圖7 WHU與CAS的13種北斗三號衛星DCB(轉換值)之間的平均偏差Fig.7 The 13 types of BDS-3 satellite DCB (transform values) mean differences between WHU and CAS 圖8 WHU與DLR的7種北斗三號衛星DCB(轉換值)之間的平均偏差Fig.8 The 7 types of BDS-3 satellite DCB (transform values) mean differences between WHU and DLR 為分析北斗三號衛星DCB估值的穩定性,首先選取3個新增頻點上的碼觀測值C1X、C5X和C8X構成的DCB類型C1X-C5X、C1X-C8X為例,將2020年4月內各衛星對應的DCB每日估值的時間序列繪于圖9。可以看出,大多數衛星的DCB估值分布在±20 ns,少數衛星的DCB數值較大,其中C33衛星的DCB估值達到-78.2 ns左右,在導航定位與授時中若不考慮,將帶來嚴重的系統偏差。在一個月的時間內,各衛星的DCB估值變化較小,表明它們具有較好的天穩定度。 圖9 BDS-3各衛星C1X-C5X和C1X-C8X DCB時間序列Fig.9 Time series of BDS-3 satellites C1X-C5X and C1X-C8X DCB 進一步分析各類DCB的穩定性,表4給出WHU、CAS和DLR直接估計或通過線性轉換得到的DCB值的月平均標準差(STD)。其中,黑體表示線性轉換值。由表4可知,WHU的DCB估值穩定性普遍優于CAS和DLR,反映本文估計的DCB穩定性良好。DLR的平均STD雖優于CAS,但其產品提供的DCB類型較少,且涵蓋的碼觀測值類型也較少,導致某些DCB類型無法通過線性轉換得到。利用CAS的DCB產品,雖然可通過線性轉換恢復所有DCB類型,但因受誤差傳遞和累積的影響,轉換得到的DCB穩定性明顯較差,進一步說明了直接估計多頻多通道DCB的必要性。 表4 北斗衛星DCB的月平均STD 此外,本文還對比分析了北斗三號衛星與北斗二號衛星DCB估值的穩定性。以北斗二號和北斗三號共有的C2I-C6I類型DCB為例,圖10給出了WHU、CAS和DLR對應的DCB估值月平均標準差。統計結果表明,WHU北斗二號、三號衛星DCB的平均STD分別為0.098、0.068 ns;CAS分別為0.1、0.076 ns;DLR分別為0.102、0.091 ns。總體而言,北斗三號衛星的DCB估值的穩定性略優于北斗二號。北斗二號衛星中C01-C05(GEO衛星)的穩定度較差,北斗三號衛星中C45、C46衛星穩定度較差,這與前面的分析一致。 圖10 北斗衛星DCB STD對比Fig.10 DCB STD comparison of BDS satellites 本文利用最新的北斗實測數據,研究了北斗三號衛星多頻多通道差分碼偏差估計方法,準確分離了所有可估的DCB類型,并從內符合精度、外符合精度、穩定性3個方面進行了分析,得出以下結論: (1) 當前,北斗三號衛星在6個頻點上提供18種碼觀測值。本文基于IGS跟蹤站實測數據,估計得到了22種不同類型的DCB。而目前能持續穩定提供DCB產品的機構CAS和DLR只提供少數幾種類型的北斗DCB。 (2) 北斗三號衛星DCB估值的內符合精度較好,平均閉合差在0.2 ns以內,且大部分優于0.1 ns,估值之間具有較好的一致性。以CAS和DLR提供的DCB估值為參考,本文DCB估值的平均偏差為0.1~0.2 ns,具有較高的外符合精度。 (3) 盡管利用CAS和DLR提供的DCB產品可以通過線性組合方式,轉換得到一些其他類型的DCB,但是,由于受到誤差傳遞與積累的影響,轉換得到的DCB精度和可靠性不如直接估計的DCB。 (4) 北斗三號衛星DCB估值具有較好的長期穩定性,一個月內的平均標準差約為0.1 ns。相比于北斗二號衛星,北斗三號衛星的DCB穩定性相對更優。 需要說明的是,當前可用于估計北斗三號衛星各類DCB的測站數量仍然有限,僅有17~34個站,北斗多頻多通道的DCB估計仍有較大的提升空間。

2 試驗數據與處理策略
2.1 試驗數據獲取


2.2 數據處理策略

3 試驗結果與分析
3.1 內符合精度分析

3.2 外符合精度分析




3.3 估值穩定性分析


4 結論與展望