單星模糊度固定的整數相位鐘法及在低軌衛星定軌中的應用
2021-04-28 00:36:56張厚喆谷德峰
測繪學報 2021年4期
關鍵詞:產品
邵 凱,易 彬,張厚喆,谷德峰
1. 國防科技大學文理學院,湖南 長沙 410073; 2. 中山大學物理與天文學院天琴中心,廣東 珠海 519082
低軌衛星及其編隊被廣泛應用于空間環境監測[1]、地球磁場研究[2]、地球重力場探測[3]以及合成孔徑雷達干涉測量[4]等一系列科學任務。精密軌道和基線確定是低軌衛星及其編隊有效利用衛星載荷完成上述任務及其應用的基礎和重要保障。目前,基于星載雙頻GPS約化動力學定軌技術,低軌衛星單星相位模糊度浮點解的事后絕對定軌精度達到2~3 cm[5-6]。編隊衛星星間基線的高精度確定主要依靠雙星相對定軌技術,通過對近距離編隊飛行衛星的相位數據進行差分,消除接收機端和GPS衛星端公共的偏差項,進一步固定雙差模糊度,從而實現高精度相對軌道確定。基于雙差模糊度固定的星間基線確定精度達到毫米甚至亞毫米級[7-8]。單臺GPS接收機相位模糊度固定技術可以有效提高低軌衛星單星絕對定軌精度[9],同時可應用于具有不同軌道高度和衛星類型的多星復雜編隊的星間基線確定[10]。
常用的單星模糊度固定方法主要有整數相位鐘法[11]、小數周偏差法[12]和鐘差解耦法[13],3種方法雖然在產品和算法實現上存在一些差異,但其數學模型是等價的[14-15]。法國CNES/CLS (the Centre National d′Etudes Spatiales and Collecte Localisation Satellites)分析中心自2009年開始公開發布GPS衛星端寬巷偏差和整數相位鐘產品[16],該產品被廣泛應用于利用整數相位鐘法實現單星模糊度固定的低軌衛星精密定軌中。文獻[17—18]分別研究了單星模糊度固定解的Sentinel-3A和Swarm衛星約化動力學定軌方法,結果表明,單星模糊度固定解的絕對定軌精度與浮點解相比提高了30%~50%。文獻[10]進一步將單星模糊度固定方法應用于GRACE、TanDEM-X和Swarm編隊衛星星間基線確定中,結果表明,單星模糊度固定解可以獲得三維精度優于5 mm的基線產品,GRACE相對軌道的KBR (K-band ranging) 檢核精度達到2.6 mm。
近年來,IGS(International GNSS Service)的多家分析中心,如CODE (Center for Orbit Determination in Europe)、NRCan (Natural Resources Canada)、ESA (European Space Agency)和武漢大學等,也開始生產類似的整數相位鐘和偏差產品用于單星模糊度固定[19]。其中,CODE和武漢大學的相關產品已公開發布。文獻[20—21]分別在2018年IGS Workshop上介紹了武漢大學和CODE分析中心整數相位鐘產品及其在精密單點定位模糊度固定中的應用效果。文獻[22]進一步利用CODE產品獲得了基于單星模糊度固定解的GRACE和Sentinel-3編隊衛星絕對和相對軌道產品,結果表明,固定單星整數模糊度可以顯著提高絕對定軌精度,GRACE編隊衛星相對軌道的KBR檢核精度達到1.8 mm。文獻[23]利用武漢大學產品研究了基于單星模糊度固定解的GRACE衛星軌道確定,結果表明,在約化動力學定軌框架下,GRACE-B衛星單星模糊度固定解的定軌精度相比模糊度浮點解提高了22%,GRACE相對軌道的KBR檢核精度達到1.7 mm。
上述3種公開發布的整數相位鐘和偏差產品都可以實現單星模糊度固定,從而達到進一步提高低軌衛星定軌精度的目的,但生成3種產品使用的數據、軟件和策略方面都有所不同,基于不同機構產品的單星模糊度固定效果以及在低軌衛星定軌中的性能是否存在差異,有待進一步研究。因此,本文首先介紹了利用整數相位鐘法實現低軌衛星單星模糊度固定的原理,給出低軌衛星定軌數據處理策略。然后,在相同的軟件和處理策略的基礎上,首次分別基于CNES/CLS、武漢大學和CODE 3家機構的產品,獲得了GRACE-FO(Follow-On)編隊衛星單星模糊度固定的絕對和相對軌道產品,同時對比了不同機構產品在單星模糊度固定中的效果。最后,通過與JPL (Jet Propulsion Laboratory)科學軌道進行互比對,計算軌道的SLR以及KBR檢核殘差,對GRACE-FO衛星絕對和相對軌道精度進行評估,對比分析了基于不同機構產品的單星模糊度固定對GRACE-FO衛星定軌的影響。
1 單星模糊度固定原理
1.1 星載GPS觀測模型

(1)

通過雙頻觀測數據的消電離層(ionosphere-free,IF)組合可有效消除一階電離層延遲項影響,偽碼和相位IF組合觀測方程可表示為
(2)

在傳統基于模糊度浮點解的衛星精密定軌中,通常使用IGS提供的精密鐘差產品對衛星端鐘差進行修正。該精密鐘差產品使用了IF組合觀測值并引入了偽距基準,導致所估計的IF組合模糊度參數受衛星端偽碼和相位延遲偏差的影響,失去整數特性[24]。
1.2 單星模糊度固定
將IF組合相位模糊度進一步表示為寬巷(wide-lane,WL)和窄巷(narrow-lane,NL)模糊度的組合形式
(3)


(4)


(5)


(6)

同樣,采用直接取整方式進行弧段間單差窄巷模糊度固定。在成功獲得弧段間單差寬巷和窄巷模糊度整數解之后,根據式(3)可計算出弧段間單差IF組合整數模糊度。將此弧段間單差模糊度固定解作為約束條件,應用于精密定軌的后續迭代過程中,即可獲得單星模糊度固定的精密軌道產品。
2 數據處理策略
2.1 精密定軌策略
本文使用國防科技大學定軌軟件工具包(NUDTTK)[28-29],利用約化動力學定軌方法進行低軌衛星精密軌道確定,在模糊度浮點解軌道收斂的條件下,增加單星模糊度固定功能,最終獲得模糊度固定條件下的精密定軌結果。詳細的定軌模型及單星模糊度固定策略見表1。其中,接收機天線PCO和PCV修正對應消電離層組合觀測值,PCV利用殘差法進行在軌估計,可參考文獻[30—31]。太陽光壓和大氣阻力的計算采用宏觀模型,數據來源和計算方法參考文獻[6,32]。此外,在單星模糊度固定中,兩顆GPS衛星共視同一顆低軌衛星需達到一定的共視時間,才能有效消除接收機端寬巷小數偏差的影響[27],因此通過設置共視時間閾值,去掉共視時間過短的區間。寬巷和窄巷模糊度閾值的設置是為了提高模糊度固定的準確性,閾值設置過小容易出現虛警,閾值設置過大會造成漏警[10,17,27]。

表1 NUDTTK精密定軌及模糊度固定策略
2.2 使用數據情況
本文使用星載GPS觀測數據對GRACE-FO編隊任務衛星進行精密軌道確定,時間為2019年1月1日至2019年1月10日(DOY 1—DOY 10)。不同機構提供的GPS衛星產品情況見表2。武漢大學生成整數相位鐘和偏差產品時,使用了CODE最終軌道產品作為先驗軌道輸入,因此在使用其提供的產品進行單星模糊度固定時需匹配CODE提供的精密軌道產品[19,23]。
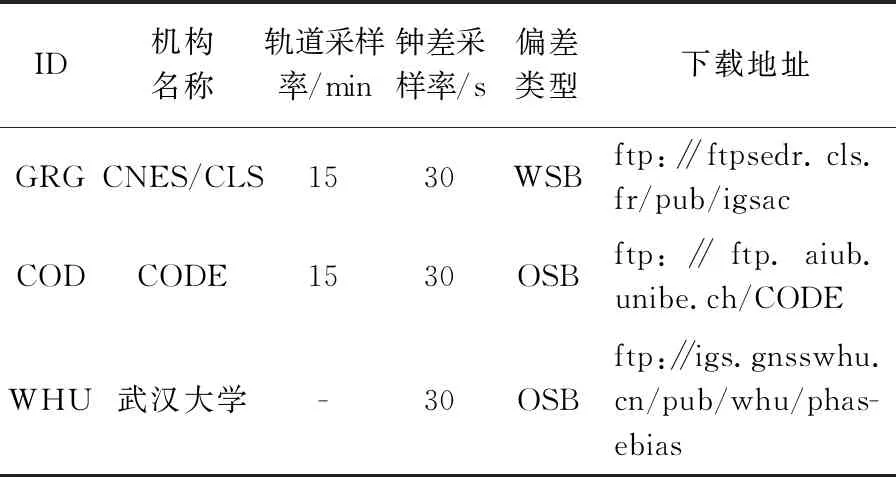
表2 不同機構提供的GPS衛星軌道、相位鐘和偏差產品
GRACE-FO編隊任務包括GRACE-C和GRACE-D兩顆低軌衛星,軌道高度約500 km,雙星距離約200 km,其觀測數據及姿態數據下載地址為ftp:∥isdcftp.gfz-potsdam.de。根據文獻[32],GRACE-C和GRACE-D衛星星載GPS接收機天線PCO以及SLR角反射器相位中心相對于衛星質心在星固系的坐標見表3。
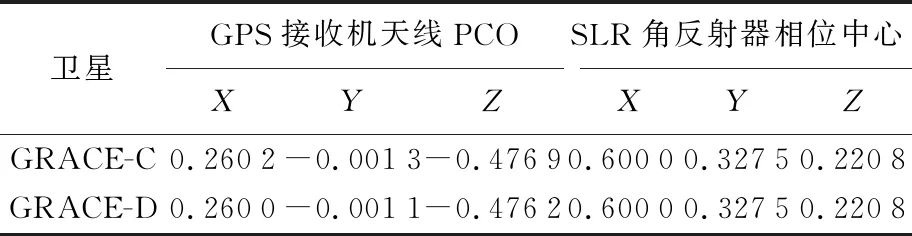
表3 GRACE-C和GRACE-D衛星GPS接收機天線PCO和SLR角反射器相位中心的坐標
3 結果與分析
3.1 模糊度固定效果分析
以2019年1月1日的GRACE-C衛星為例,在進行首次模糊度固定時,基于不同機構產品的寬巷和窄巷模糊度的小數殘差分布情況如圖1所示。其中,對浮點模糊度直接四舍五入到最接近的整數,減去整數后剩余的小數部分即為小數殘差。可見,基于不同機構產品的寬巷和窄巷模糊度小數殘差分布基本相同,寬巷模糊度殘差的方差都在0.1周寬巷波長左右,窄巷模糊度殘差的方差都小于0.2周窄巷波長。

圖1 GRACE-C衛星的寬巷和窄巷模糊度小數殘差分布(2019年1月1日)Fig.1 Distributions of wide-lane and narrow-lane ambiguity fixing residuals for GRACE-C satellite on January 1,2019
經過3次迭代后可以盡可能多的固定窄巷模糊度從而增強觀測條件。根據閾值判斷為固定成功的弧段個數除以總弧段個數即為模糊度固定成功率。以GRG產品為例,GRACE-C衛星首次模糊度固定成功率為85.2%,第2次為93.7%,第3次為93.8%,第2次迭代相比第1次模糊度固定成功率會有明顯提升,但第3次迭代模糊度固定成功率只有微弱提高。GRACE-C衛星寬巷和窄巷模糊度固定最終成功率如圖2所示。可見,基于不同機構產品的寬巷和窄巷模糊度固定平均成功率基本相同,分別為97%和94%左右。GRACE-D衛星具有類似的結論。
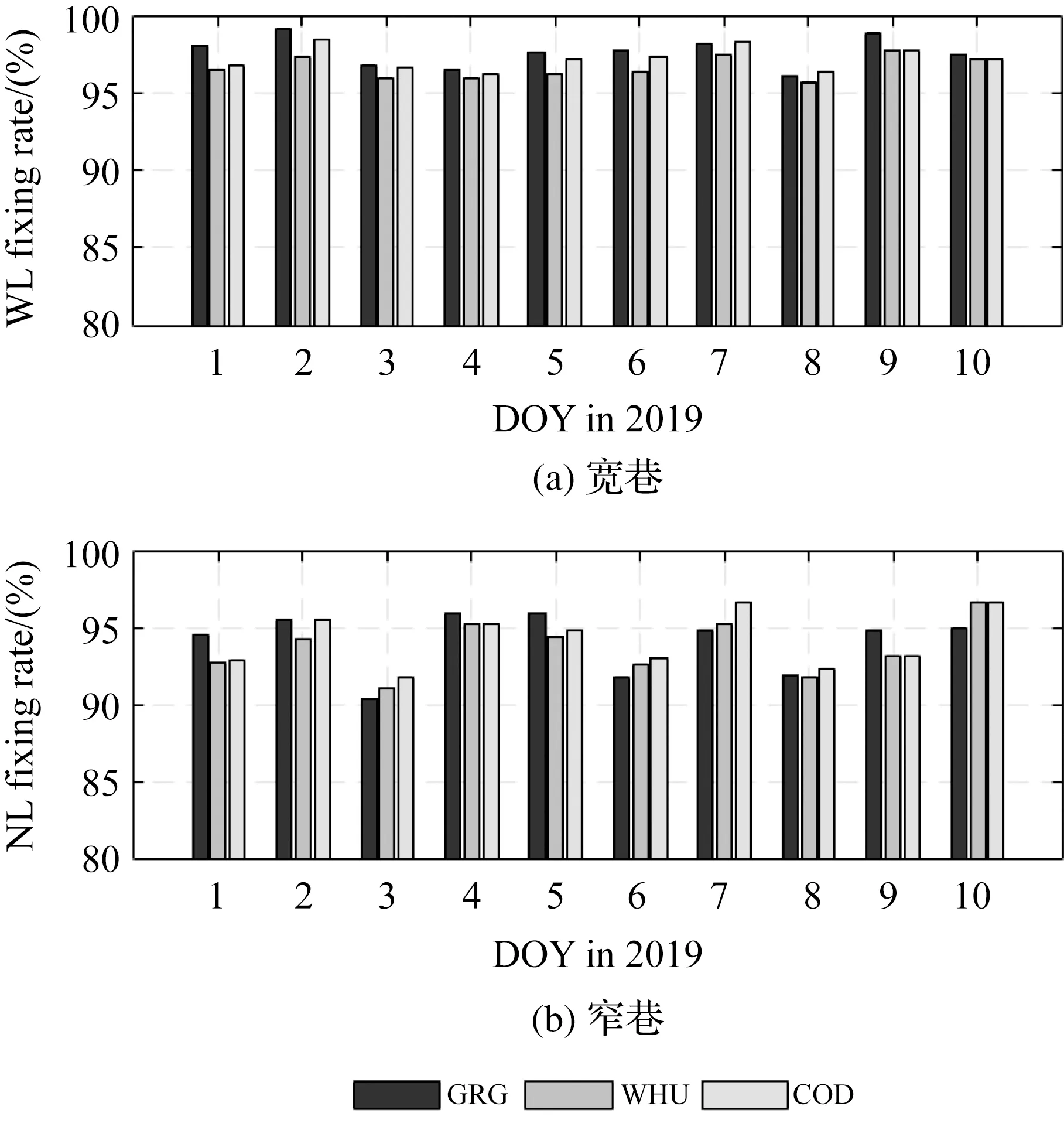
圖2 GRACE-C衛星寬巷和窄巷模糊度固定成功率Fig.2 Wide-lane and narrow-lane ambiguity fixing rates of GRACE-C satellite
3.2 絕對軌道結果分析
為分析單星模糊度固定對GRACE-FO衛星絕對定軌的影響,同時給出了基于不同機構產品的模糊度浮點解定軌結果。因此,得到如下6種軌道產品:基于GRG產品的模糊度浮點解軌道(記為GRG-FA)和固定解軌道(GRG-IA)、基于WHU產品的模糊度浮點解軌道(WHU-FA)和固定解軌道(WHU-IA)以及基于COD產品的模糊度浮點解軌道(COD-FA)和固定解軌道(COD-IA)。
(1) 本文定軌弧長為30 h,相鄰定軌弧段有6 h重疊計算軌道,通過重疊弧段的軌道差異水平評估定軌內符合精度。基于不同機構產品的GRACE-C和GRACE-D軌道6 h重疊弧段偏差三維(3D)RMS統計如圖3所示。可見,相比于模糊度浮點解,基于不同機構產品的模糊度固定解軌道內符合精度都明顯提高,提高幅度達到40%~60%。
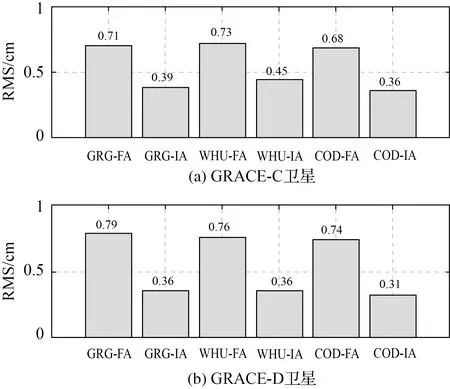
圖3 GRACE-C和GRACE-D衛星軌道6 h重疊弧段偏差3D RMSFig.3 3D RMS of the 6 h overlaps for GRACE-C and GRACE-D
(2) JPL精密科學軌道是基于單星模糊度固定的約化動力學軌道[9]。試驗期間,GRACE-C和GRACE-D的JPL精密科學軌道的SLR檢核殘差RMS分別為0.98和0.94 cm,表明JPL科學軌道產品具有很高的精度水平,可作為參考軌道對本文軌道結果進行檢核。將定軌結果與JPL精密科學軌道產品進行互比對,可在一定程度上反映本文所得軌道的精度水平。以JPL軌道作為參考,計算本文所得軌道在徑向(R)、切向(T)、法向(N)以及3D方向上互比對偏差RMS,統計結果見表4。可見,模糊度固定解與浮點解相比,所得到的軌道和JPL參考軌道之間具有更好的一致性。基于不同機構的整數相位鐘和偏差產品,軌道在R、T、N和3D方向的互比對偏差RMS減小幅度基本一致。采用模糊度固定解時,GRACE-C和GRACE-D軌道與JPL軌道的互比對偏差3D RMS降低了30%~40%。

表4 不同定軌結果與JPL科學軌道互比對偏差RMS統計
(3) 利用SLR數據對定軌結果進行檢核。SLR數據由ILRS(International Laser Ranging Service)提供[40],可作為一種獨立的測量手段檢核衛星軌道精度。表5和表6分別給出GRACE-C和GRACE-D衛星軌道的部分測站SLR檢核殘差RMS結果。可見,經單星模糊度固定后,基于不同機構產品的軌道SLR檢核殘差RMS平均值都明顯減小,并且減小的量級相當。當單星模糊度固定時,GRACE-C和GRACE-D衛星軌道的SLR檢核殘差RMS減小了約30%。
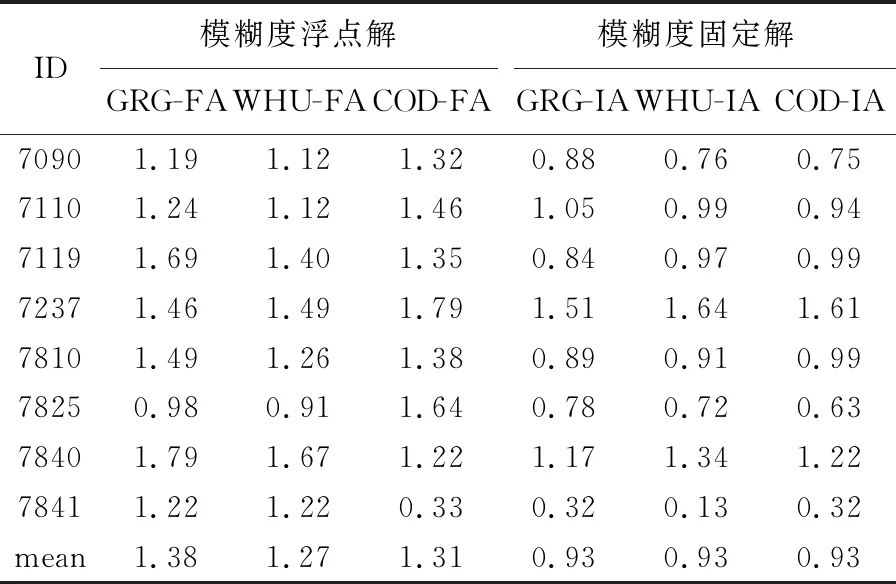
表5 GRACE-C衛星定軌結果的SLR檢核殘差RMS
3.3 相對軌道結果分析
對于GRACE-FO編隊,高精度的相對軌道確定是編隊實現重力場反演等任務的重要前提條件。其相對軌道確定通常使用相位差分觀測數據,通過建立相對定位模型和雙差模糊度固定來實現[29]。此外,在低軌衛星絕對定軌的基礎上,通過兩顆衛星的絕對位置直接作差也可以獲得相對軌道產品,此時基線精度通常會低于由相對定軌模型解算得到的基線產品精度[23]。本文將利用KBR數據和雙差模糊度固定的基線產品對相對軌道進行檢核,進一步分析基于不同機構產品的單星模糊度固定對相對軌道的影響。
(1) 利用KBR數據對基于絕對定軌獲得的相對軌道結果進行檢核。6種軌道產品的KBR檢核殘差RMS結果如圖4所示。為方便比較,基于雙差模糊度固定的相對定軌結果(命名為DD-IA)也在圖中給出,生成該產品的策略及方法參考文獻[29]。與模糊度浮點解的相對軌道結果相比,基于GRG、WHU和COD產品的模糊度固定解相對軌道KBR檢核殘差RMS分別減少了63%、63%和72%。基于單星模糊度固定解的相對軌道精度可達到2 mm左右,與文獻[10,22—23]結果相當。此外,由于GPS軌道、鐘差等誤差在單星模糊度固定中無法完全消除,結果進一步驗證了單星模糊度固定的相對軌道精度要低于雙差模糊度固定的相對定軌精度。
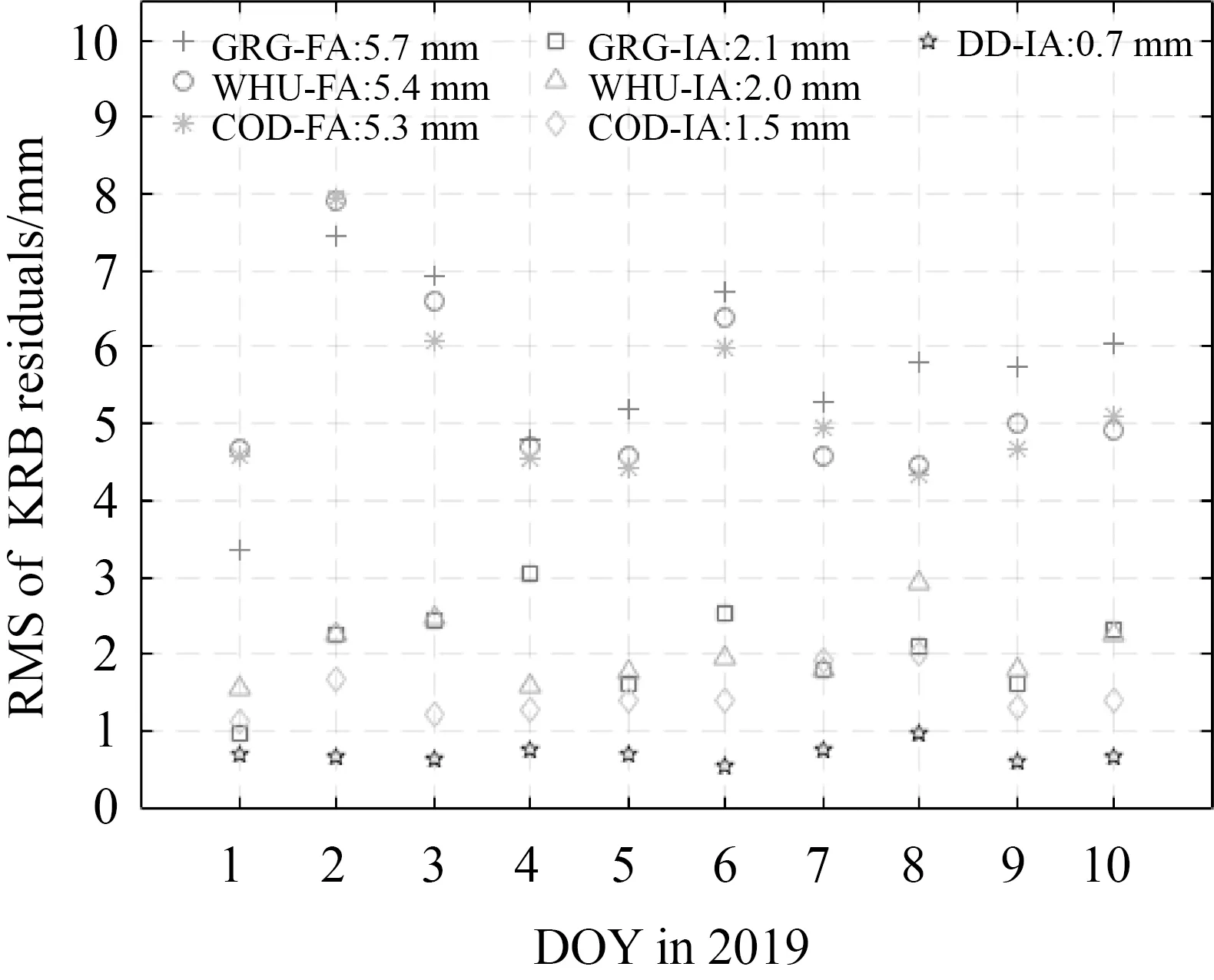
圖4 基于不同策略的相對軌道KBR檢核殘差RMSFig.4 RMS of KBR validation residuals for relative orbit solutions based on different strategies
(2) 利用DD-IA相對軌道產品對本文基于絕對定軌獲得的相對軌道進行檢核。相對軌道互比對偏差在R、T、N以及3D方向上的RMS統計結果見表7。可見,與模糊度浮點解相比,當單星模糊度固定時,相對軌道結果與DD-IA相對軌道產品的一致性在R、T、N以及3D方向都明顯提高。基于GRG、WHU和COD產品的互比對偏差3D RMS分別減小了56%、55%和63%。
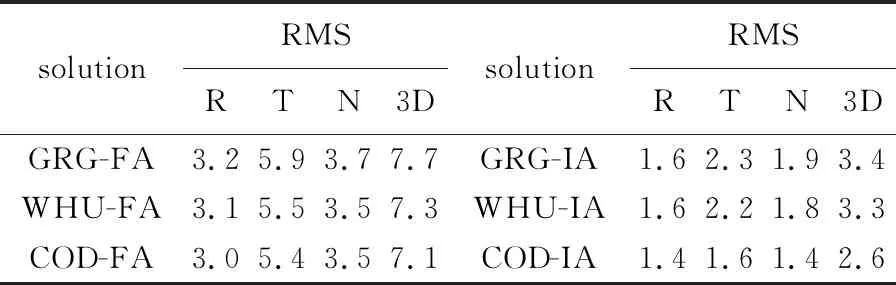
表7 基于不同機構產品的相對軌道與DD-IA相對軌道產品互比對偏差RMS
4 結 論
本文使用整數相位鐘方法對單星相位模糊度參數進行固定,并應用于低軌衛星定軌解算中。進一步對比分析了GRG、WHU和COD產品在GRACE-FO編隊衛星單星模糊度固定以及精密定軌中的效果。結果表明,基于不同機構產品的單星模糊度固定效果基本相當,GRACE-C衛星窄巷模糊度固定成功率達到94%。利用不同機構產品進行單星模糊度固定后,GRACE-FO衛星單星絕對定軌精度均明顯提高且提高幅度相近,軌道SLR檢核殘差RMS減小了30%左右。分別利用GRG、WHU和COD產品實現GRACE-FO編隊衛星單星模糊度固定后,相對軌道的KBR檢核殘差RMS分別為2.1、2.0和1.5 mm。結果表明,基于不同機構產品的單星模糊度固定都可用于獲得高精度的相對軌道產品。隨著越來越多的IGS分析中心開始提供整數相位鐘和偏差產品,下一步可融合不同機構產品以提高GPS產品的精度和穩健性,進一步提高模糊度固定成功率和定軌精度。
猜你喜歡
現代裝飾(2022年4期)2022-08-31 01:39:32
現代裝飾(2022年3期)2022-07-05 05:55:06
物流技術與應用(2022年5期)2022-06-17 06:01:38
快樂語文(2021年36期)2022-01-18 05:48:46
金橋(2021年4期)2021-05-21 08:19:22
中國化妝品(2018年6期)2018-07-09 03:12:40
中國化妝品(2018年6期)2018-07-09 03:12:32
Coco薇(2015年1期)2015-08-13 02:23:50
汽車維修與保養(2015年6期)2015-04-17 03:31:50
玩具(2009年10期)2009-11-04 02:33:14