基于兩層POD和BPNN的翼型反設計方法
2021-04-29 06:16:00李春娜賈續毅龔春林
航空工程進展 2021年2期
李春娜,賈續毅,龔春林
(西北工業大學空天飛行技術研究所,西安710072)
0 引言
在氣動優化設計中,CFD方法由于具有高可信度而逐漸得到廣泛應用[1-2],但是大量的CFD分析所消耗的時間和計算資源也是十分巨大的。為了有效地降低優化成本,研究人員提出了一系列更高效的優化設計方法,例如,使用伴隨方法可以有效地提高多設計變量梯度優化過程的效率[3-4]。但是從優化算法本身進行改進仍不能有效地解決調用大量CFD的問題。
代理優化算法[5-6]的應用使CFD的調用次數呈量級式下降,大幅提高了優化效率。例如,韓少強等[7]使用梯度增強型Kriging模型實現了高維設計變量的氣動反設計;邱亞松等[8]使用本征正交分解(Proper Orthogonal Decomposition,簡稱POD)和Kriging/RBF代理模型實現了對變外形的翼型定常流場的預測。但是,Kriging等代理模型一般只適用于單輸出,對于流場參數預測等多輸出問題建模效率低下。
近年來,研究人員將機器學習方法應用于流場預測、氣動優化等方面,并取得顯著成效[9-11]。Zhu Linyang等[12]使用RBF神經網絡建立了數據驅動的湍流模型并實現了渦黏的預測;劉凌君等[13]使用反向傳播神經網絡(Back Propagation based Neural Network,簡稱BPNN)構建了翼型參數化系數與翼面壓力系數的神經網絡,并實現了翼型反設計,但存在模型訓練樣本量大(4 000個訓練樣本),需要將翼型參數化系數分組建立多個神經網絡等復雜問題。
直接使用神經網絡(Neural Network,簡稱NN)構建流場預測模型,由于流場數據維度高,模型輸入輸出維度差異過大,導致模型學習緩慢、建模困難。而以POD為代表的降階模型可以有效地解決高維數據的維度災難問題,并已成功應用于流場近似求解、翼型反設計等方面[14-15]。
本文以翼型為研究對象,首先,結合POD和NN的特點,發展一種基于兩層POD和BPNN的翼型反設計方法;然后,將該方法應用于亞/跨聲速下的翼型反設計,包括翼型庫建立、聚類取樣、基模態個數選取、模型訓練等方面;最后,通過算例對預測誤差、聚類取樣效果和超參數等方面進行分析。
1 建模方法
1.1 樣本庫建立
常見的翼型參數化方法包括Hicks-Henne、CST、PARSEC、B樣條等[16-17],其中Hicks-Henne參數化通過在基準翼型的上下表面疊加數個Hicks-Henne形函數,并調節形函數的個數、作用位置、高度系數來實現翼型外形的改變,在翼型反設計、氣動優化設計中得到廣泛應用。
本文以典型的亞聲速翼型NACA0012和跨聲速翼型RAE2822為基準翼型,在其上下翼面各施加6個Hicks-Henne形函數,其高度系數范圍在亞聲 速 中 為[±0.005,±0.010,±0.010,±0.010,±0.010,±0.005],在 跨 聲 速 中 為[±0.005,±0.005,±0.005,±0.005,±0.005,±0.005],對應的作用位置均為0.10c、0.25c、0.45c、0.65c、0.80c、0.90c(c為翼型弦長)。
1.2 POD降階
POD是將具有高維特征的數據轉化為正交的低維特征數據。為了最大程度地保留原始數據的信息量,應使降階后的數據方差最大化[18]。
設r個樣本構成原始樣本數據矩陣X=每 個 樣 本 為n維 向 量,即對X做中心化處理,得到新樣本數據D=其中

使用線性映射矩陣U(m×n)將D降 階 至m維 空間,降階所得數據為Y(m×r),即

要使Y方差最大化,只需計算D的協方差矩陣var(D)的特征值和特征向量,并將前m個最大的特征值所對應的特征向量q1,q2,…,qm構成U即可。var(D)的計算公式為

式中:DT為D的轉置矩陣。
POD降價流程如圖1所示。
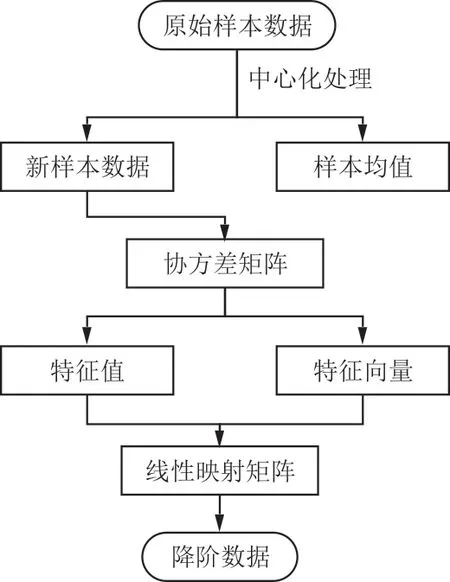
圖1 POD降階流程Fig.1 Process of building POD reduced-order model
1.3 BPNN模型
BPNN是一種通過前向傳播計算輸出,反向傳播計算誤差的全連接神經網絡。其特點是多輸入多輸出建模,具備較強的非線性擬合能力,普遍應用于分類或回歸問題[19]。典型的BPNN具有三層:輸入層、隱藏層和輸出層,如圖2所示。
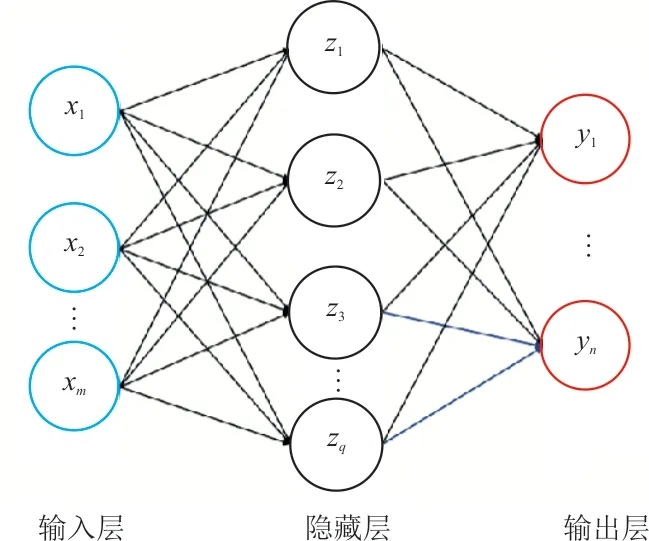
圖2 三層BPNNFig.2 A BPNN with three-layer
對于如圖2所示的BPNN模型,輸入層為m個神經元,輸出層為n個神經元,隱藏層神經元個數為q,其大小由m、n值確定,這里q=max{m,n}。每層神經元通過權值ω和激活函數連接[19],本文算例中隱藏層和輸出層的激活函數類型分別為tansig和purelin函 數,BPNN的 訓 練 流 程 如 表1所示。

表1 BPNN的訓練流程Table 1 Training process of BPNN
1.4 翼型反設計方法
結合POD和BPNN模型,發展一種快速的翼型反設計方法,其流程圖如圖3所示。具體流程分為四步。

圖3 基于兩層POD和BPNN的翼型反設計方法Fig.3 Airfoil reverse design method based on two-layer POD and BPNN
第一步,翼型庫建立。
使用參數化方法得到r個不同幾何外形的翼型(無量綱化),每個翼型可以用坐標集表示,其中x0為構成翼型的所有坐標點的橫坐標,每個翼型均相同;yi為構成第i個翼型的所有坐標點的縱坐標。因此,每個翼型可以由唯一的yi確定。使用流場求解器,可以計算給定工況下每個翼型所對應的翼面壓力系數。第i個翼型對應的翼面壓力系數用{xC,Ci}表示,其中xC為描述上下翼面所有點的橫坐標值,且每個翼型均一致;Ci為第i個翼型的翼面壓力系數值。因此,每個翼型的翼面壓力系數可以由唯一的Ci確定。
第二步,確定樣本集。
在建立翼面壓力系數到幾何外形的映射之前,為了確定最佳訓練樣本量,提高訓練效率,本文提出一種聚類取樣策略。首先將所有樣本的翼面壓力系數C進行POD降階,得到壓力系數的基模態系數矩陣將基模態系數一致的樣 本 歸為一類Si(i=1,2,…,k,且k<r),每類 隨機抽取一個樣本Ci=?Si作為訓練集中的樣本,訓練集為從剩下的(r-k)個樣本中隨機抽取t個樣本作為測試集
第三步,模型建立。
訓練集的k個樣本,其壓力系數為CT(n1×k),幾何外形(縱坐標)為yT(n2×k),對壓力系數和幾何外形分別建立POD模型,命名為POD 1和POD 2,得到對應的基模態系數矩陣YC(m1×r)和Yy(m2×r),其中m1和m2滿 足m1?n1、m2?n2,其 大 小 通 過 分 析POD重構誤差確定。此后,將YC和Yy分為作為BPNN的輸入和輸出來訓練BPNN模型。其中,BPNN為三層,輸入層為m1維,輸出層為m2維,隱藏層神經元個數為max{m1,m2}。
第四步,翼型反設計。
任意選取測試集中的樣本,其對應的壓力系數為Cs。首先,通過POD 1模型得到壓力系數的基模態系數YC s;然后,帶入訓練好的BPNN,得到預測幾何外形的基模態系數Yy s;最后,通過POD 2重構得到預測的幾何外形ys。從而快速實現翼型反設計。
2 算例與分析
2.1 翼型庫建立
采用Hicks-Henne參數化方法,計算工況為亞聲 速 狀 態:Ma=0.35、α=2.79°、Re=6.5×106;跨聲速狀態:Ma=0.75、α=2.79°、Re=5.7×106,流 場 求 解 器 分 別 為Xfoil[13]和Fluent。以NA?CA0012翼型求解為例,對比Xfoil與Fluent得到的翼面壓力系數分布,如圖4所示,可以看出:兩者基本吻合,說明Xfoil在小攻角亞聲速計算狀態下具有較高的準確性。而后,利用拉丁超立方試驗方法生成500個翼型樣本,并通過流場求解器計算500個新翼型的壓力系數,得到壓力系數矩陣C。
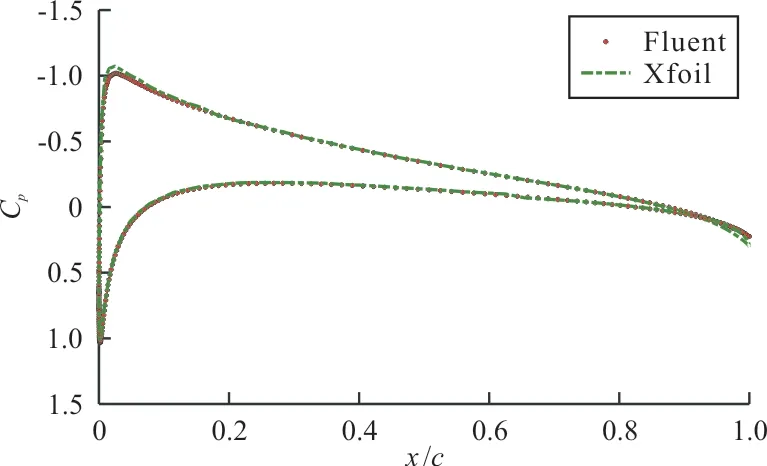
圖4 NACA0012翼型翼面壓力系數分布對比Fig.4 Comparison of pressure coefficient distribution of NACA0012
2.2 聚類取樣
定義重構(或預測)誤差為
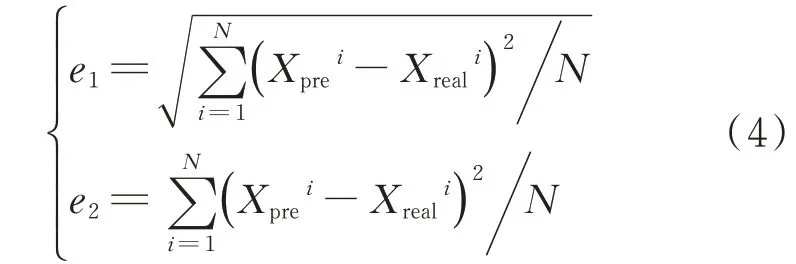
式中:e1為均方根誤差;e2為均方誤差;分別為第i個坐標位置的預測數據和真實數據,該數據在POD 1中表示壓力系數,在POD 2中表示幾何外形縱坐標;N為總坐標位置數目。
對壓力系數C隨機抽取90%進行POD建模,10%進行POD重構誤差分析。不同基模態個數取值下壓力系數的重構誤差如圖5所示,可以看出:可以發現,壓力系數的信息主要集中在前11階:基模態個數小于11時,重構誤差隨著基模態個數增加減小得非常快;當基模態個數繼續增大時,重構誤差的下降程度變緩,并逐漸接近0。當基模態 個 數 取20時,亞 聲 速e1=3.7×10-3,e2=1.39×10-5,跨 聲 速e1=3.0×10-3,e2=9.97×10-6,誤差很小,因此壓力系數的降階維數s1設為20。


圖5 壓力系數的重構誤差Fig.5 Reconstruction error of pressure coefficient
采用K-means算 法[18]對500組壓力系 數的基模態系數(20階)進行聚類分析,聚類數目設置為200。根據1.4節的第二步,可以得到200個訓練樣本。再在剩余樣本中隨機抽取10個作為模型的測試樣本。
2.3 模型訓練
使用與2.2節相同的方法確定幾何外形的基模態個數取值。隨機抽取訓練樣本的90%,并對其幾何外形建立POD 2模型,然后對另外10%進行重構誤差分析,得到幾何外形的重構誤差如圖6所示。
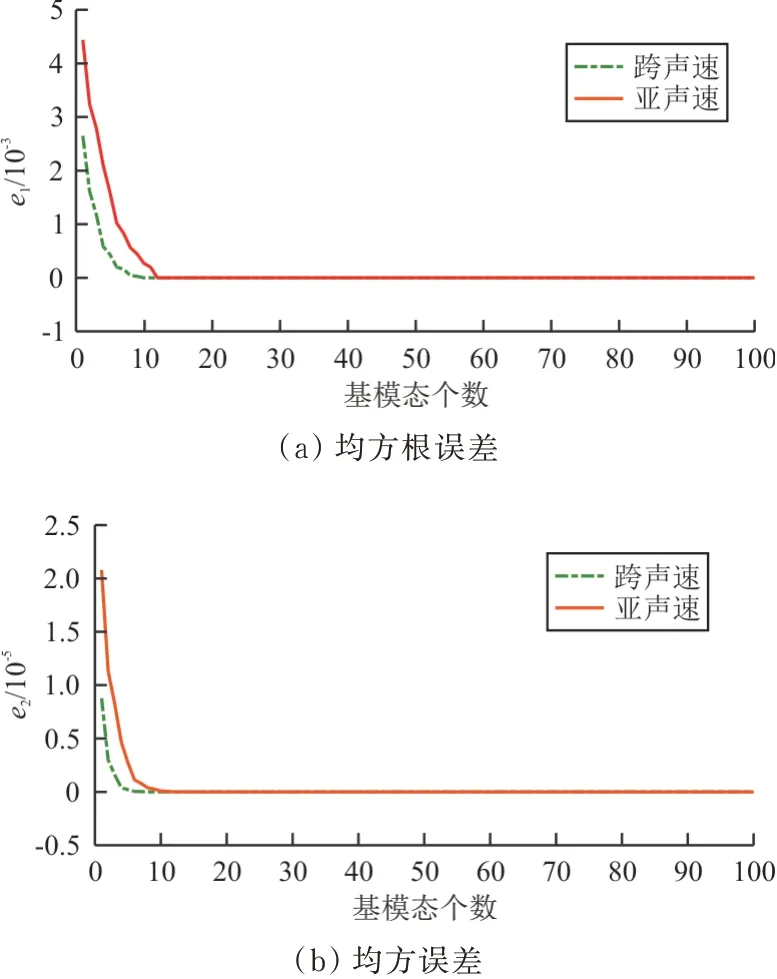
圖6 幾何外形的重構誤差Fig.6 Reconstruction error of geometry
從圖6可以看出:當基模態個數為12時,亞/跨聲速的均方根誤差e1基本接近于0,說明前12階基模態可以高精度地重構出幾何外形。
對比圖5和圖6,可以看出:跨聲速的重構誤差小于亞聲速,這是由于在Hicks-Henne參數化中跨聲速的參數范圍小于亞聲速所致。
此時,確定了BPNN模型的輸入和輸出維度分別為20、12,取隱藏層神經元個數為20,訓練并建立從壓力系數的基模態系數到幾何外形的基模態系數的網絡。由于訓練樣本量小(200個),且BPNN模型僅為三層,模型訓練耗時很短。在In?tel i5-8500 CPU、16G RAM的PC上,聚類取樣耗時約為0.5 s,POD 1和POD 2的建模耗時均不到0.2 s,BPNN訓練耗時為5~8 s,整個模型的建模時間相對于流場求解時間是很短的。
2.4 結果分析
在某計算工況下,給定目標壓力分布,獲得滿足該壓力分布的翼型的過程稱為翼型反設計[20]。在亞/跨聲速下,分別對于所選取的10個測試樣本,將其壓力系數作為模型輸入,使用兩層POD+BPNN模型,預測出對應的翼型,并與目標翼型的外形進行對比,得到均方根誤差分布如圖7所示。
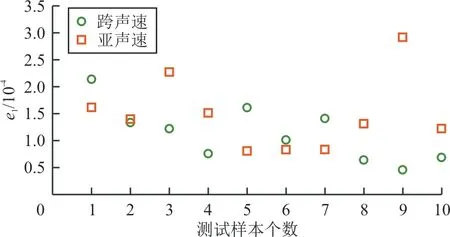
圖7 翼型反設計的均方根誤差Fig.7 RMSEs of inverse-designed airfoils
取亞/跨聲速中誤差最大的第9個和第1個測試樣本,對比其目標翼型與預測翼型,如圖8所示。對比預測翼型的壓力系數與目標壓力系數,如圖9所示。
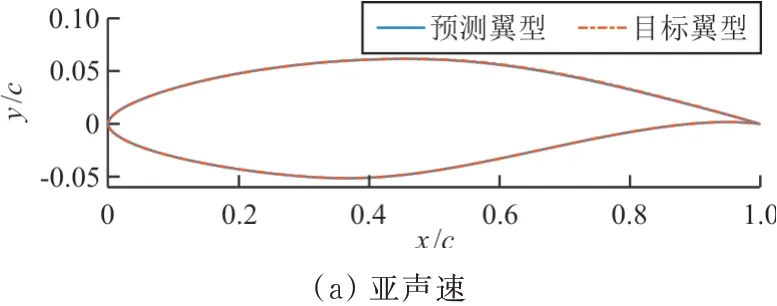
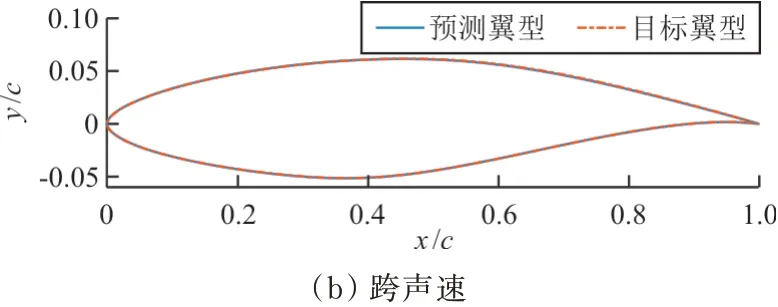
圖8 目標翼型和預測翼型的對比Fig.8 Comparison of real and predicted airfoils
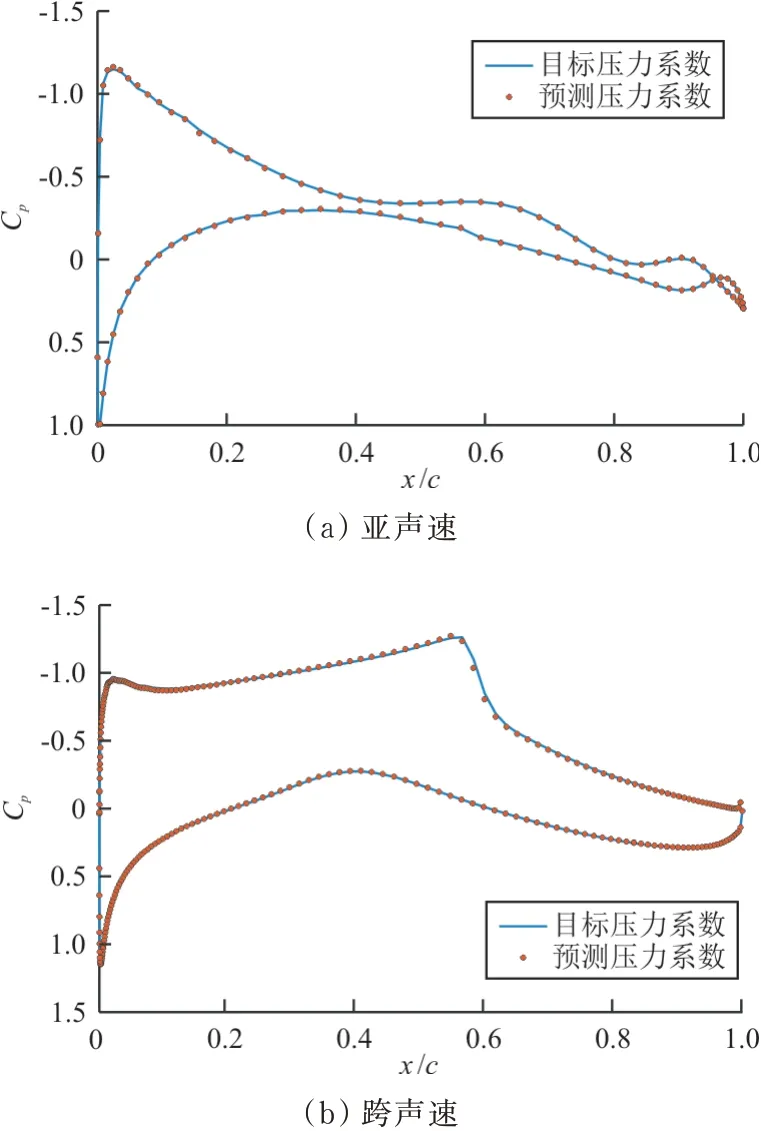
圖9 目標和預測壓力系數的對比Fig.9 Comparison of real and target pressure coefficient
從圖8~圖9可以看出:預測翼型與目標翼型無明顯差異,且預測翼型的壓力系數與目標壓力系數曲線吻合較好,說明在亞/跨聲速工況下,兩層POD+BPNN模型的精度能夠滿足翼型反設計的要求。
同時,以亞聲速為例,將預測翼型與目標翼型的縱坐標做差,得到上下翼面翼型外形的預測誤差Δ1;將預測翼型的壓力系數與目標壓力系數做差,得到上下翼面壓力系數的預測誤差Δ2。兩個誤差如圖10所示,可以看出:翼型縱坐標的預測誤差的量級為10-4,而翼型縱坐標的量級為10-2;壓力系數的預測誤差的量級為10-2,而壓力系數的量級為100,說明使用該模型進行翼型反設計具有較高的準確性,且預測翼型的翼面壓力系數分布與目標壓力系數分布相一致。
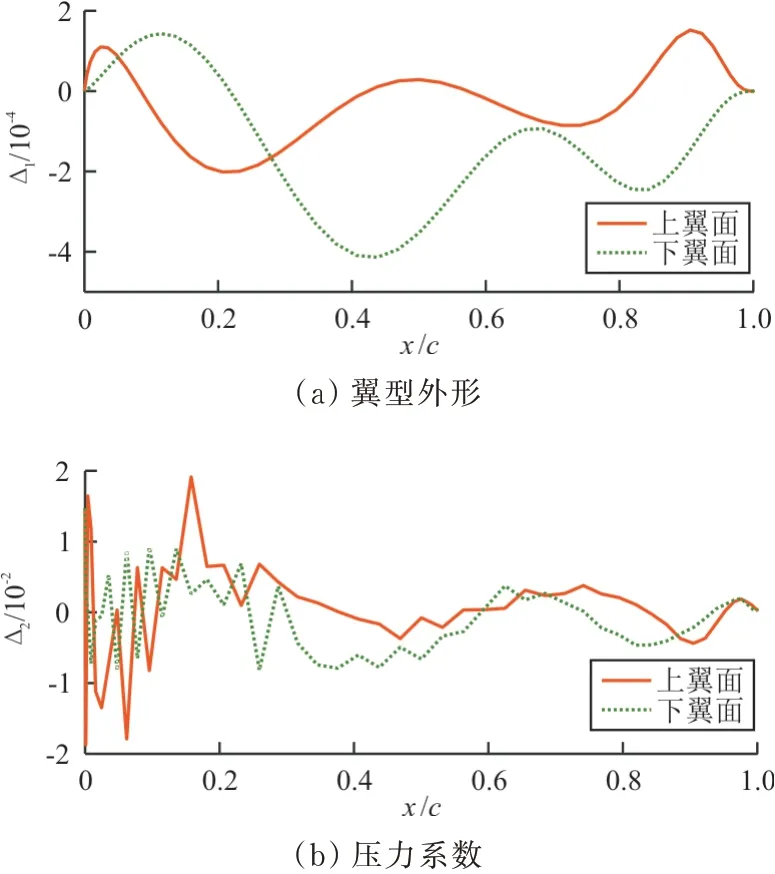
圖10 翼型外形和壓力系數的預測誤差Fig.10 Prediction errors of airfoils and pressure coefficients
上述模型是由聚類取樣得到的200個樣本訓練所得,為了進一步分析訓練樣本量對模型預測精度的影響,選取聚類數目k∈[20,490],并隨機取10個樣本作為測試集,得到亞/跨聲速下、不同k下10個測試樣本的預測翼型外形與真實翼型外形的均方根誤差均值e1隨k的變化規律如圖11所示,可以看出:聚類數目小于120時,隨著聚類數目的增加,均方根誤差下降很快,說明訓練樣本量過少不能夠表征出全部樣本的特征;當聚類數目達到180以上,均方根誤差處于較低水平,繼續增加聚類數目不會使均方根誤差產生明顯變化,說明聚類取樣得到的180個樣本基本可表征出全部樣本的特征。本文選取200個樣本建模是合理的。

圖11 聚類數目對模型預測誤差的影響分析Fig.11 Influence of the of cluster number on the model error
2.5 超參數分析
BPNN的超參數包括網絡層數、隱藏層的神經元個數、激活函數類型、訓練函數類型、學習率等,這些超參數會影響模型的訓練效率、預測精度。本文針對跨聲速算例,以隱藏層神經元個數和激活函數為例,分析超參數對模型訓練的影響。
(1)隱藏層神經元個數
通過設置不同的隱藏層神經元個數,分析模型的預測誤差和訓練耗時,如圖12所示。

圖12 隱藏層神經元個數對模型訓練的影響分析Fig.12 Influence of the number of hidden layer neurons on model training
從圖12可以看出:當神經元個數小于10時,預測誤差較大,說明在本問題中,隱藏層神經元個數過少不能夠完整地學習到樣本的特征;當神經元個數取值在10~50之間,預測誤差基本一致,但是訓練耗時會隨著神經元個數的增多呈現上升趨勢。因此,隱藏層神經元個數的取值應適當。
(2)激活函數
選取6種不同的激活函數組合,分析不同組合下模型的訓練耗時和預測誤差,如表2所示,可以看出:使用“tansig+purelin”和“logsig+purelin”均能保證較高的訓練效率和預測精度。
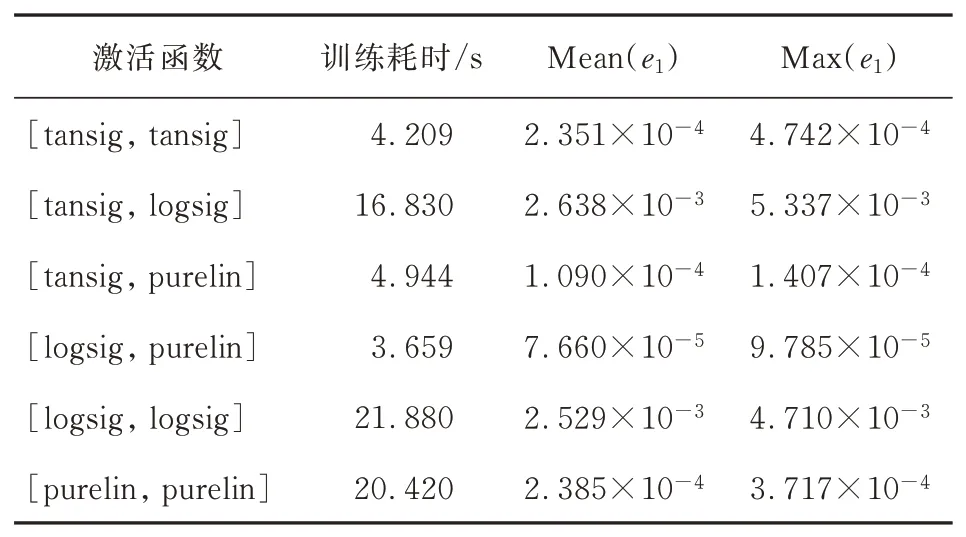
表2 不同激活函數組合對模型訓練的影響分析Table 2 Influence of the different activation functions on model training
3 結論
(1)本文發展了一種基于兩層POD+BPNN的翼型反設計方法,可以高效地建立從高維翼面壓力系數到高維翼型外形的映射。
(2)通過對壓力系數的基模態系數聚類來確定樣本集,可以在保證模型精度的前提下有效地降低訓練樣本量,提高建模效率。
(3)針對亞/跨聲速算例,使用200個樣本建立的兩層POD+BPNN模型,其預測翼型外形的均方根誤差為10-4量級,對應的壓力系數與目標壓力系數吻合很好,說明該模型的精度可以滿足翼型反設計的要求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
核科學與工程(2015年4期)2015-09-26 11:59:03
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
